
Human Activity Recognition using Deep Neural Network with
Contextual Information
Li Wei and Shishir K. Shah
Computer Science Department, University of Houston, 3551 Cullen Blvd., Houston, TX 77204, U.S.A.
Keywords:
Activity Recognition, Deep Learning, Context Information.
Abstract:
Human activity recognition is an important yet challenging research topic in the computer vision community.
In this paper, we propose context features along with a deep model to recognize the individual subject ac-
tivity in the videos of real-world scenes. Besides the motion features of the subject, we also utilize context
information from multiple sources to improve the recognition performance. We introduce the scene context
features that describe the environment of the subject at global and local levels. We design a deep neural
network structure to obtain the high-level representation of human activity combining both motion features
and context features. We demonstrate that the proposed context feature and deep model improve the activity
recognition performance by comparing with baseline approaches. We also show that our approach outperforms
state-of-the-art methods on 5-activities and 6-activities versions of the Collective Activities Dataset.
1 INTRODUCTION
Human activity analysis is one of the most impor-
tant problems that has received considerable attention
from the computer vision community in recent years.
It has various applications, spanning from activity
understanding for intelligent surveillance systems to
improving human-computer interactions. Recent ap-
proaches have demonstrated great performance in rec-
ognizing individual actions (Weinland et al., 2011;
Tran et al., 2012). However, in reality, human activ-
ity can involve multiple people and to recognize such
group activities and their interactions would require
information more than the motion of individuals. This
remains a challenging research topic largely due to
the tremendous intra-class variation of human activ-
ities attributed to the visual appearance differences,
subject motion variabilities, and viewpoint changes.
To solve these challenges, previous approaches in
human activity recognition have focused on informa-
tion about context. Context can be defined as infor-
mation that is not directly related to the human activ-
ity itself, but it can be utilized to improve the tradi-
tional target-centered activity recognition (Wang and
Ji, 2015). Lan et. al. (Lan et al., 2012) proposes ac-
tion context to encode the human interactions among
multiple people. Choi et. al. (Choi et al., 2011) uses
spatio-temporal volume descriptor to capture nearby
person actions.
Most existing approaches for human activity
recognition mainly use people as context without
richer context information, such as the scene infor-
mation where the activity is performed, the loca-
tion of person within the scene, etc. Further, pre-
vious approaches have either utilized the context di-
rectly as feature inputs to classifiers such as ran-
dom forest (Choi et al., 2011) and support vector
machine (Tran et al., 2013), or incorporated context
through probabilistic models like conditional random
fields (Tran et al., 2015). There is little work utilizing
deep models and networks to capture the contexts for
human activity recognition. Deep models have the po-
tential to systematically incorporate multiple sources
of contexts due to their multi-level deep structure, the
capability of probabilistic reasoning, and the integra-
tion of hidden units to synthesize higher level rep-
resentations of the raw input features (Wang and Ji,
2015). Therefore, in this work, we propose a deep
neural network (DNN) based model to recognize the
human activity by taking advantage of its probabilis-
tic reasoning power and incorporate multiple sources
of context information. We combine motion and con-
text information. The motion information is encoded
by using the low-level motion features and high-level
mobility features. The context information is incor-
porated to represent the scene and the human interac-
tions. The scene features encodes the attribute of the
scene at global and local level, while the group fea-
34
Wei L. and K. Shah S.
Human Activity Recognition using Deep Neural Network with Contextual Information.
DOI: 10.5220/0006099500340043
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 34-43
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ture captures the human interaction similar to Tran et
al. (Tran et al., 2013). For each feature, we carefully
design the network structure to get the higher level
representation of input features, and the combination
of different representations. We demonstrate that the
integration of our context features and deep model is
able to achieve better performance than state-of-the-
art approaches on the collective activity dataset (Choi
et al., 2009).
In summary, the main contributions of this paper
are:
• We introduce a two-level scene context descriptor.
Beside the group context feature similar to many
other works, we introduce a two-level scene con-
text feature that describe the environment infor-
mation of centered-target at the global and local
levels.
• A deep model for human activity recognition. We
present a deep neural network model that jointly
captures multiple sources of context information,
and achieves state-of-the-art performance over the
collective activity dataset (Choi et al., 2009).
2 RELATED WORK
In human activity recognition systems, various low-
level features are introduced to describe the activity
observation. Schuldt et. al. (Schuldt et al., 2004)
proposed a local space-time feature to represent the
human movement observed in a video, and inte-
grated such representations with SVM classification
schemes for recognition. Laptev et. al. (Laptev et al.,
2008a) proposed space-time feature point (STIP) and
spatio-temporal bag-of-features as the descriptor for
human motion. Tran et. al. (Tran et al., 2012)
presented a framework for human action recognition
based on modeling the motion of human body parts.
They utilized a descriptor that combines both local
and global representations of human motion, encod-
ing the motion information as well as being robust
to local appearance changes. The mentioned activity
recognition methods mainly focus on recognizing the
individual action. Their frameworks are difficult to
scale to address real-world scenarios where multiple
people activity and interaction are involved. Our ap-
proach represents the motion information using STIP
feature similar to (Laptev et al., 2008a), but combines
the rich context information that we extract from the
video. By using the deep model, our method is able
to: capture the extensive information about people
motion and interactions; scale to recognize activity of
each individual in the scene; and improve the accu-
racy of the overall activity recognition task.
Context based Activity Recognition. Context infor-
mation is widely utilized in many video analysis ap-
plications (Wei and Shah, 2015; Wei and Shah, 2016).
In the topic of human activity recognition, many ap-
proaches integrate contextual information by propos-
ing new feature descriptors extracted from an indi-
vidual and its surrounding area. Lan et. al. (Lan
et al., 2012) proposed Action Context (AC) descrip-
tor capturing the activity of the focal person and the
behavior of other persons nearby. The AC descrip-
tor is concatenating the focal person action probabil-
ity vector with context action vectors that captures the
nearby people action. Choi et. al. (Choi et al., 2009)
propose Spatio-Temporal Volume (STV) descriptor,
which captures spatial distribution of pose and mo-
tion of individuals in the scene to analyze group ac-
tivity. STV descriptor centered on a person of in-
terest is used to classify centered person’s group ac-
tivity. SVM with pyramid kernel is used for classi-
fication. The same descriptor is leveraged in (Choi
et al., 2011), however, the random forest classifica-
tion is used for group activity analysis. In (Lan et al.,
2012; Choi et al., 2009; Choi et al., 2011), the nearby
person that serves as context are selected according to
the distance to the centered target. This does not nec-
essarily ensure the existence of interactions among
the selected persons. To address this issue, Tran et.
al. (Tran et al., 2015) proposed group context activ-
ity descriptor similar to (Lan et al., 2012), but the
people are first clustered into groups by modeling the
social interaction among the persons. However, due
to the noisy observation in videos, the group detec-
tion might not be robust or stable. Therefore, our
approach utilizes the social interaction region to se-
lect the contextual people without a clustering pro-
cess. Besides focusing on people as context, our ap-
proach also introduces scene information as context
for the first time. The scene context describes the en-
vironment around the center target at the local and
global levels. We utilize the existing place recogni-
tion method (Zhou et al., 2014) to provide scene con-
text features that have semantic meanings.
Deep Model for Activity Recognition. In recent
years, deep models including deep neural networks,
convolution neural networks, and auto-encoders have
been used in many applications. For human activity
recognition (Ji et al., 2013; Karpathy et al., 2014),
convolution neural networks and auto-encoder ap-
proaches (Hasan and Roy-Chowdhury, 2014) have
been developed. However, these action/activity deep
models are generally target-centered and do not con-
sider any context information, which is important for
human activity that involves multiple people. Com-
paratively, Wang et. al. (Wang and Ji, 2015) proposed
Human Activity Recognition using Deep Neural Network with Contextual Information
35

Motion Feature
Context Feature
Space-time
Mobility
Group Context
Scene Context
Input Video
Feature
Extractation & Abstraction
Hidden Layers Softmax
Activity
Probability
...
...
...
...
P(C
1
|x)
P(C
2
|x)
P(C
3
|x)
P(C
4
|x)
P(C
5
|x)
h
1
h
2
h
3
h
4
h
5
Figure 1: The overview of proposed neural network model.
an event recognition framework, which is a hierarchi-
cal context model that captures the context informa-
tion in multiple levels. Similarly, our approach uses
a deep-structure model that be trained using the con-
textual information extracted from human groups and
video scene. However, our approach focuses on a dif-
ferent problem, which is recognizing the activity of
each individual appearing in the scene, other than an
overall event of the entire scene (Wang and Ji, 2015).
3 METHODOLOGY
To recognize the human activity, we a utilize deep
neural network based approach. The structure of our
network is as shown in Figure 1.
Human Activity Recognition. Given the input video
with tracking information of each subject, our system
recognizes activity of each individual person at every
frame. Two distinct features are considered in this
recognition network, the first based on human mo-
tion ( Sec. 3.1) and the second based on the context
(Sec. 3.2). The features are extracted and abstracted
using dense fully connected hidden layers. The out-
put hidden units of the two parts are combined and
fed into another fully connected network, which has
a soft-max layer to compute the probability of recog-
nized activity from input observations.
The input datasets are videos. In addition, we as-
sume that the people tracking information, an estima-
tion of their 3D space location, and facing direction in
3D space is available. We denote persons appearing
in video as {p
i
}, the tracking 2D bounding box of i-th
person at frame t as b
t
i
, the estimated 3D location as
l
t
i
∈ R
3
, estimated the facing direction quantized into
8 viewpoints as d
t
i
∈ {f ront, f rontle f t, le f t, back-
le f t, back, backright, right, f rontright}.
In the following, we discuss in detail about our
proposed features, along with our training and infer-
encing approach.
3.1 Motion Features
Motion features we consider are the low-level obser-
vation of the movements within the video. In our
approach, two motion features are used: Space-time
features that capture the low-level motion observed in
the video; and the mobility features that capture the
movement of human as a whole part.
For an input video, we compute features for
frames with interval β. That is, we extract features
for the sample located at time t by computing the fea-
ture descriptors using a video segments comprising of
frames in the interval [t −β, t + β].
Space-time Features. There are various space-time
features to describe human motions in the video.
We choose space-time interest points (STIP) (Laptev
et al., 2008b), because it can extract feature points in
space-time dimension robustly, and it also has been
applied in event recognition (Wang and Ji, 2015).
STIP method detects interest points using a space-
time extension of the Harris operator. For each in-
terest point it computes descriptors of the associated
space-time patch. In this paper, histograms of ori-
ented gradient (HOG) and histograms of optical flow
(HOF) feature are computed as the descriptors of the
space-time patch. We obtain the feature words of both
features by first detecting all the interest points over
the entire videos data set, and then applying K-Means
clustering to obtain K
i
feature words for HOG fea-
tures and HOF features.
To describe the motion of p
i
at time t, we first
collect all the interest points located within {b
k
i
|k ∈
[t −β, t +β]}, as shown in Figure 2(a). Then we com-
pute the histogram of gradient and optical flow given
the collected interest points as shown Figure 2(b). Fi-
nally, it results in two K
m
dimensional histogram vec-
tors.
After normalization to ensure each vector can sum
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
36

X
Y
T
... ...
... ...
T = t t+1t-1 t-β t+β
(a) (b)
Figure 2: STIP feature histogram. (a) shows the video seg-
ment centered at time t, with length 2β+1. The green boxes
denote the bounding box areas of the subject. (b) shows the
STIP histogram generated using the video segment (a).
up to one, the concatenation of two vectors serves as
the motion descriptor of the person. We denote this as
S
t
i
. If there are no interest points located in bounding
boxes of the subject, the descriptor is a zero vector of
dimension 2K
m
. The extracted feature forms the input
into our network as shown in the left part of Figure 3,
and is followed by four fully-connected layers with
(h
s1
, h
s2
, h
s3
, h
s4
) hidden units at each layer. Finally,
at the top we have a layer with h
s4
hidden units to
realize a response to be combined with mobility in-
formation described below.
Mobility Feature. As the estimation of people 3D
location can be obtain using (Ess et al., 2008), we
take the distance of movement in 3D space through
the video segment as a description of human mo-
bility. We compute subject movement at time t as
v
t
i
= l
t
i
−l
t−1
i
, where l
t
i
denotes the location of p
i
at
time t. We denote p
i
’s mobility feature at time t is
V
t
i
= [v
t−β
i
, v
t−β+1
i
, ..., v
t
i
, ..., v
t+β−1
i
, v
t+β
i
], which is a
vector of length 2β + 1. We input the extracted mo-
bility feature into our network as shown in the right
part of Figure 3. The input layer is fully connected
with hidden layer that contains h
o
units.
The hidden units of STIP features and mobility
feature are concatenated to form a merge layer, which
is fed into another fully connected layer of size h
m
.
These h
m
hidden units abstract the overall motion in-
formation of the subject observed in the video at a
sample frame.
3.2 Context Features
In our approach, context information plays an im-
portant role to improve the activity recognition ac-
curacy. The context information includes two parts:
the scene based context and group based context.
Scene based context captures the environment infor-
mation surrounding the subject, allowing the network
to find the association between environment informa-
tion and activities. Scene based context has two lev-
................
........
.....
.....
.....
.....
.....
Input Layer
Hidden Layer
Merge Layer
Space-time Feature Mobility Feature
... ...
4 layers
h
s1
h
s4
h
o
h
m
Figure 3: Motion feature layers. The green layers are net-
work inputs; the gray layers are fully connected dense lay-
ers with hidden units; the blue layer is merge layer, which
concatenates its inputs layers.
els: scene prior describes the global scene attributes
of the video frame; and scene context describes the
scene around the person locally. The group of people
that are physically near the subject also provide strong
context information about human activity, as many
approaches build various features to describe the peo-
ple actions of near by humans to improve activity
recognition accuracy (Choi et al., 2011; Tran et al.,
2013). Similarly, the group based context contains
two parts: group action describes the interaction ob-
servation of nearby people; and group structure cap-
tures the shape (positions, direction) of nearby hu-
mans relative to the target person.
3.2.1 Scene based Context
Some activities have strong association with the envi-
ronment, so the environment information as a context
can reduce the ambiguity in its recognition. For exam-
ple, jogging or crossing activities are more likely to
happen in outdoor scenes, and queuing will be more
likely to happen if the scene appears to be a shop. In
this paper, we extract the scene context information
by looking into the image patch that extends around
the bounding box of the tracked subject and use the
descriptors of theses image patches as context fea-
tures.
Rather than using low-level features such as ap-
pearance features to describe the image patches, we
use a descriptor with semantic meaning. We uti-
lize the existing place recognition methods to extract
the semantic attribute of subject contexts. As deep
convolution network gives the state-of-the-art perfor-
mance in place recognition tasks, we use the Place-
CNN (Zhou et al., 2014) to generate the image patch
descriptor. Given an image patch to Place-CNN, it
outputs the probability of given image belonging to
205 categories. An example of place recognition on
context image patches is shown in Figure 4. We sim-
ply denote the recognition process of Place-CNN as
function Place(I
t
), where I
t
is the image frame at time
t of a given video, Place(.) returns the probability
vector of given image being recognized as belonging
Human Activity Recognition using Deep Neural Network with Contextual Information
37

Scene Prior
Scene Context
Scene Context
1
2
Scene Prior: crosswalk:0.54, gas_station:0.30
Scene Context #1: crosswalk:0.70, parking_lot:0.07
Scene Context #2: phone_booth:0.20, lobby:0.16
Figure 4: The scene prior and scene context. The green box
is the bounding box of tracked people, with people id inside
it. The yellow boxes are the scene context areas of persons.
The red box which bounds the whole image is the scene
prior area. We input images into Place-CNN to recognize
place probability. The top two likely places of the above
scene and scene context of person 1 and 2 are shown below
the figure.
to the place categories.
Scene Prior. The scene prior gives the environment
context information at a global level for each video
frame. To extract the scene prior feature, L
t
, for all
the subjects that appear at time t, we compute
L
t
=
1
2β + 1
t+β
∑
k=t−β
Place(I
k
), (1)
where scene prior feature L
t
∈ R
205
and
∑
205
s=1
L
t
s
= 1.
Scene Context. Besides the scene prior as global in-
formation for all the subjects appearing in the video
frame, for each individual subject, we also build lo-
cal scene features that capture the local environment
information.
We denote the scene context image patch of p
i
at time t as T
t
i
, which is the region surrounding the
bounding box b
t
i
. Both T
t
i
and b
t
i
have the same cen-
ter location, while width and height of T
t
i
is 3 and 1.5
times the width and height of b
t
i
, respectively. The
scene context feature of p
i
at time t is denoted as Q
t
i
,
which is computed as follow:
Q
t
i
=
1
2β + 1
t+β
∑
k=t−β
Place(T
k
i
), (2)
Where Q
t
i
∈ R
205
and
∑
205
s=1
Q
t
s
= 1.
After we compute scene prior and scene context
features, we input the two features into the network
as shown in Figure 5. We first concatenate the two
features prior to feeding them to two fully connected
layers h
t1
and h
t2
. The intent is to capture the interac-
tion between global scene prior and local scene con-
text. The hidden units in layer h
t2
serve to provide the
scene context information.
................
........
Scene Prior Feature Scene Context Feature
h
t1
.....
h
t2
..... .....
..... .....
Figure 5: The network of combining scene prior and context
information.
3.2.2 Group based Context
As people tend to form groups in various social be-
haviors, many approaches use the information from
persons that physically are near the subject of interest
to infer the activity. In our approach, we simply de-
fine the group as people within the social interaction
area.
There are two group based context information
that are extracted: group interaction context captures
the activity interaction of subject with group mem-
bers; group structure context describe the spatial dis-
tribution of positions and directions of group mem-
bers.
Group Interaction Context. The group interaction
context captures the activity interactions between the
centered subject and group members. We use con-
cepts from proxemics (Was et al., 2006; Tran et al.,
2013), and define interaction region as an area where
the people are able to make social interaction with
the centered subject. Interaction region is an ellipse
E(c
i
, a, b), where the center of ellipse is c
i
and (a, b)
is the major and minor axis of ellipse, respectively. In
our implementation, we use c
i
= l
i
+ 0.3d
i
, a = 3.35,
b = 2.0 as suggested in (Was et al., 2006). We are
able to detect group members by finding the person
within social interaction region, as shown in Figure 6.
We denote the group members of subject p
i
at time t
as N(p
i
, t).
To generate the group interaction context feature
for p
i
at time t, we first compute the space-time fea-
tures S
t
i
, which is a bag-of-feature histogram of mo-
tion features as discussed in Sec. 3.1. Then we com-
pute the average space-time feature U
t
i
for all persons
within the interaction region N(p
i
, t) as follow:
U
t
i
=
1
|N(p
i
, t)|
∑
p
j
∈N(p
i
,t)
S
t
j
(3)
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
38
c
a
b
(a) (b)
Figure 6: Interaction region. (a) The centered subject is in
the green box, where the group members of target subject
are in blue boxes, non-group members are in red boxes. (b)
top view of persons 3D locations estimation of (a), the in-
teraction region of the centered subject is displayed as the
green ellipse, with center c and major a, minor b marked at
ellipse.
We generate a 2D histogram as B
t
i
= S
t
i
T
∗U
t
i
that cap-
tures the co-occurrence frequencies of S
t
i
and U
t
i
. We
normalize the 2D histogram B
t
i
to ensure that all ele-
ments in the matrix sum to 1 and build a group inter-
action context feature by flattening the matrix into a
K
2
i
dimension vector. If K
i
is large, then we can re-
create word bags for STIP features by clustering all
the motion features of the data set. In our implemen-
tation we use K
a
=
√
K
i
as number of bags for group
interaction context feature extraction.
X
Y
T
... ...
... ...
T = t t+1t-1 t-β t+β
1
2
3
4
1
2
3
4
0
10
20
30
40
50
(a) (b)
Figure 7: Group interaction context feature. (a) shows a
video segment, where the green part covers the bounding
box of target subject, the blue part covers the interacting
group members. (b) shows the 2D co-occurrence histogram
of target subject in the video segment (a).
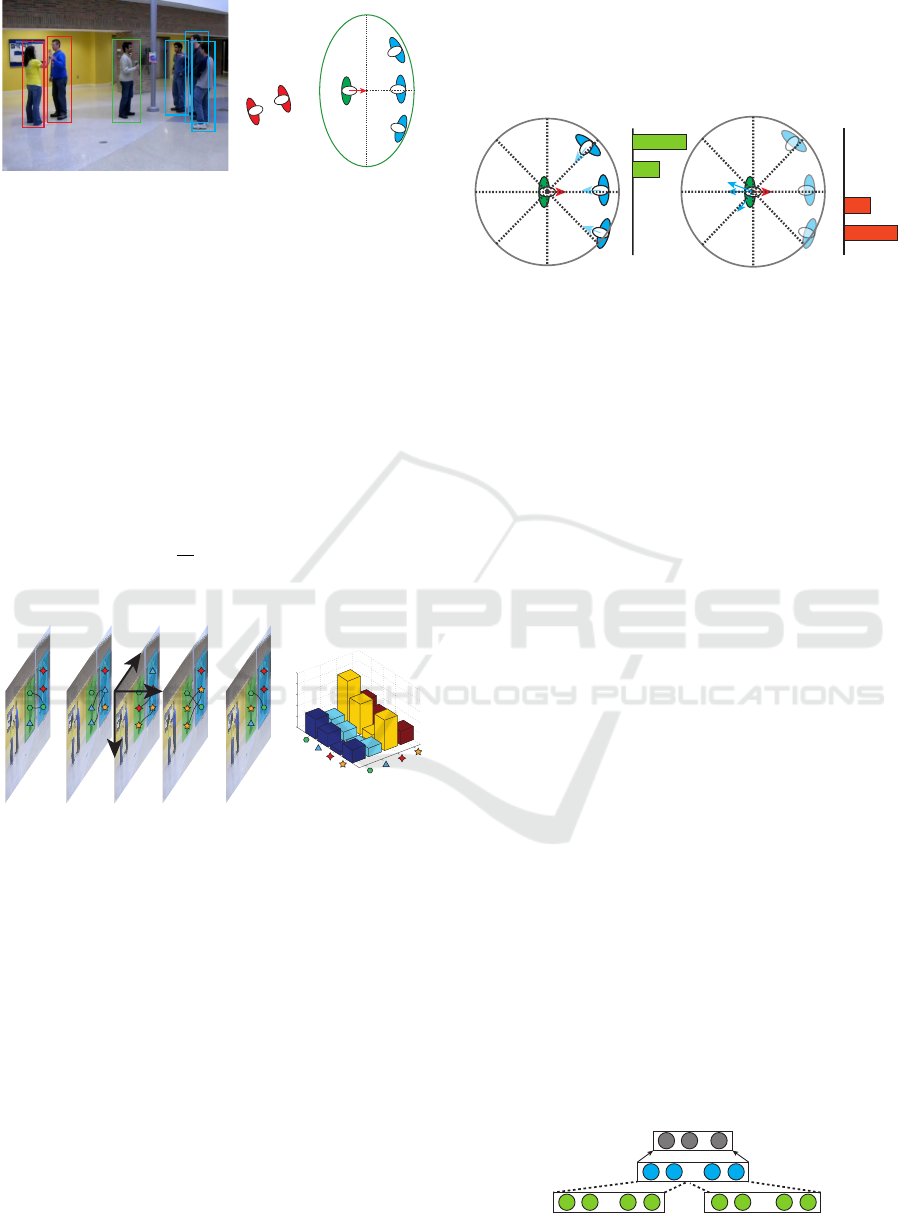
Group Structure Context. The group structure con-
text describes the relative positions and directions of
people within interaction regions. For different ac-
tivities, the shape of the group and the interactions
between group members can be different. For exam-
ple, group talking activity would have more than two
people positioned in front of each other, face to face,
while queuing activity most likely has more than two
people standing in a line and facing the same direc-
tion. Therefore, we design group structure context
feature to capture the positions and facing direction
of the group.
To describe the position information, we construct
a local coordinate centered at the target subject, as
shown in Figure 8(a), and form a histogram of an-
gles to represent the position distribution of group
members. We denote the function Ang(
#»
V
1
,
#»
V
2
) that re-
1
23
23
1
4
4
1
23
23
1
4
4
1
2
3
4
1
2
3
4
(a) (b)
Figure 8: Group position histogram and direction his-
togram. (a) shows the position histogram; (b) shows the
direction histogram. In this figure, the angle space is split
into 4 sub-range in order to compute histogram.
turns the angles between vector
#»
V
1
and
#»
V
2
. The group
member position distribution of p
i
at time t is obtain
by computing the normalized histogram of angle set
{Ang(d
k
i
, l
k
j
−l
k
i
)|p
j
∈ N(p
i
, k), k ∈ [t −β, t + β]}. To
capture the direction information, we calculate the an-
gles between the direction of centered subjects and
other group members, then form a histogram of direc-
tions that represent the direction distribution of inter-
acting neighbors, as shown in Figure 8(b). The group
member direction distribution of p
i
at time t is obtain
by computing the normalized histogram of angle set
{Ang(d
k
i
, d
k
j
)|p
j
∈ N(p
i
, k), k ∈ [t −β,t + β]}. Both
position and direction histogram have K
s
bins.
After the position histogram and direction his-
tograms are concatenated, we have the group struc-
ture context feature. We denote it as G
t
i
, which is a
2K
s
dimension feature, where K
s
is bin size of angle
histogram.
Finally, position histogram and direction his-
togram are input into two fully connected hidden lay-
ers (the hidden units number are h
i1
and h
i2
for group
interaction feature; h
r1
and h
r2
for group structure fea-
ture), followed by a merge layer. The hidden units at
the top represent the group context information.
After the final hidden layer for scene context in-
formation and group context information, we use a
merge layer to concatenate hidden units from the two
layers, as shown in Figure 9. The merge layer is fed
into a fully connected layer for further abstraction.
The top h
c
hidden units form the representation for the
overall context information of a given observation.
.....
.....
....
.....
Scene Context Info. Group Context Info.
h
c
Figure 9: The network of group context informations.
Human Activity Recognition using Deep Neural Network with Contextual Information
39

The hidden units of motion information in Fig-
ure 3 and context information in Figure 9 are fur-
ther concatenated, and input into the network shown
in Figure 1, which includes four fully connected lay-
ers (with hidden units number h
1
, h
2
, h
3
, h
4
), and a
soft-max layer at the end to calculate the probabilities
of given observation for a set of activities. So far we
have presented our deep neural network model, and in
the following we are going to present the method for
training and inference using our model.
3.3 Learning and Inference
Model Learning. The proposed model is a neu-
ral network with parameter W, which includes the
weights matrix and bias parameters of all dense lay-
ers in the network. We denote X = {x
t
i
, A
t
i
|i =
1, ..., N, t = 1 + β, ...} as the training data, where x
t
i
=
(S
t
i
,V
t
i
, L
t
, Q
t
i
, B
t
i
, G
t
i
) includes all the individual fea-
tures, and A
i
is the ground truth human activity label.
The output of the network is the probability of given
observation belonging to each class of activity la-
bel. We denote the forward propagation as F(W, x
t
i
) =
{P(C
k
|x
t
i
), k = 1...M}, where M is the number of ac-
tivity categories. In the training phase, we compute
and minimize the categorical cross-entropy between
predictions and ground truth:
E(W, X) = −
1
N
N
∑
i=1
M
∑
j=1
1(A
i
= C
j
)log(P(C
j
|x
i
)) (4)
We optimize the loss function using Stochastic
Gradient Descent (SGD) updates with Nesterov mo-
mentum (Nesterov et al., 2007). In each iteration, the
model parameters W are updated as follow:
4W
t
= µ ∗4W
t−1
−lr ∗O
W
E(W
t
+µ ∗δW
t−1
, Z) (5)
W
t+1
= W
t
+ 4W
t
(6)
Where µ is the momentum, lr is learning rate, O
W
is the gradient of the model parameter W , and Z is a
random subset of training data for computing gradi-
ent in each iteration. We initialize the parameters of
the network using Glorot weight initialization (Glorot
and Bengio, 2010).
Model Inference. Given query human activity obser-
vation x, our model recognizes the activity category
C
?
by finding the maximal posterior probability given
the observations from both motion feature space and
context feature space through Equation 7.
C
?
= argmax
k
P(C
k
|x) (7)
We implement our network using Lasagne (Dieleman
et al., 2015) with GPU acceleration.
4 RESULTS
In this section we describe the experiments that evalu-
ate the performance of the proposed model for human
activity recognition.
4.1 Datasets
Our human activity recognition model is tested us-
ing Collective Activity dataset introduced by Choi et.
al. (Choi et al., 2009). Other datasets (e.g, CAVIAR,
VIRAT, or UT-Interaction) either focus on single per-
son activity or the semantic labels provided are agnos-
tic to scene context.
Collective Activity dataset comprises of two ver-
sions. The first version of data set contains five ac-
tivities (Cross, Wait, Queue, Walk and Talk) and we
denote this as Data-Act-5. The second version of
dataset includes two additional activities (Dance and
Jog) and removes the Walk activity, since the Walk ac-
tivity is an individual activity rather than a collective
activity. We denoted the second version as Data-Act-
6. HOG based human detection and head pose es-
timation along with a probabilistic model is used to
estimate camera parameters (Choi et al., 2009). Ex-
tended Kalman filtering is employed to extract 3D
trajectories and head pose estimates are provided as
part of the dataset. In general, this dataset repre-
sents real-world, noisy observation with occlusions
and automatic person detection and trajectory gen-
eration. We use the 4-fold cross-validation scheme
similar to (Choi and Savarese, 2012) to test the per-
formance of our approach. To minimize the over-
fitting in training phrase, we split data of non-training
fold randomly into validation data set (30%) and test-
ing data set (70%). In each interaction of parameter
updates, the accuracy of validation data set is com-
puted. When the accuracy over the training data set
increases, but the accuracy over the validation data
set stays the same or decreases, the neural network is
over-fitting and we stop training.
4.2 Experiments and Comparison
In this section, we demonstrate the effectiveness of
the proposed human activity recognition model that
integrates both motion features and multiple sources
of context information. The neural network to be
evaluated has configuration as shown in Table 1.
The experiments are performed on both versions
of Collective Activity dataset. The performance of
proposed model on both versions of the dataset is
shown in Figure 10. The low value of the non-
diagonal elements implies that our model is highly
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
40

Table 1: Experiments Network Configuration
h
s1
150 h
m
25 h
r1
10 h
3
25
h
s2
100 h
t1
100 h
r2
10 h
4
25
h
s3
100 h
t2
20 h
c
10 h
5
25
h
s4
100 h
i1
10 h
1
50
h
o
10 h
i2
10 h
2
50
discriminative with low decision ambiguity between
activities.
The confusion matrix of Data-Act-5 in Figure 10
(left) also shows that the confusion between Walk and
Cross is reasonably low, despite the fact that both ac-
tivities are Walk activity but with different scene se-
mantics. Our model captures the scene context infor-
mation and recognizes Walk activity better than base-
line approaches as shown in Table 2 and other state-
of-the-art approaches as shown in Table 3.
Compare with Baseline Approaches. To investi-
gate the contribution of each individual information
that builds up the feature, we separate the features
into three parts: Motion part denotes the space-time
feature and mobility feature; Scene part denotes the
scene prior and scene context feature; Group part de-
notes the group interaction feature and group struc-
ture context. We use the following combinations of
above three parts (Motion, Motion-Scene, Motion-
Group, Motion-Scene-Group) to train the deep neu-
Cross
Wait
Queue
Walk
Talk
0.70
0.09
0.00
0.19
0.02
0.10
0.82
0.00
0.03
0.01
0.00
0.00
0.96
0.07
0.03
0.20
0.08
0.03
0.68
0.03
0.00
0.01
0.01
0.04
0.91
Cross
Wait
Queue
Walk
Talk
Cross
Wait
Queue
Talk
Dance
Jog
0.85
0.25
0.00
0.00
0.00
0.01
0.14
0.73
0.01
0.00
0.00
0.00
0.00
0.00
0.98
0.00
0.02
0.02
0.00
0.02
0.01
1.00
0.00
0.00
0.00
0.00
0.00
0.00
0.96
0.00
0.00
0.00
0.00
0.00
0.02
0.96
Cross
Wait
Queue
Talk
Dance
Jog
Figure 10: Confusion matrix of Collective Activity Dataset.
5 activities version (top) and 6 activities version (bottom).
ral network (DNN) model and compare their perfor-
mance to validate the contribution of each individ-
ual part. When one part of feature is not involved
in the training, we remove the nodes and layers re-
lated to that part within the network. To evaluate
the discriminative power of proposed deep model, we
take the same feature combinations and train the Sup-
port Vector Machine (SVM) classifier (Chang and Lin,
2011) and compare its performance with DNN model.
We conduct the experiments on both Data-Act-5 and
Data-Act-6 and the results are summarized in Table 2.
By looking into the average accuracy, DNN-
Motion-Scene outperforms the DNN-Motion by
13.4% in Data-Act-5 and 19.2% in Data-Act-6, the
activities that lead to significant accuracy improve-
ments are Talk (31.0%) and Queue (16.2%) in Data-
Act-5, Queue (42.3%) and Wait (34.4%) in Data-
Act-6, respectively. DNN-Motion-Group outper-
forms the DNN-Motion by 25.7% in Data-Act-5
and 17.5% in Data-Act-5 in average. Interestingly,
Queue and Talk lead to most significant accuracy im-
provements in both datasets: Queue improves 48.4%
in Data-Act-5 and 42.8% in Data-Act-5, Talk im-
proves 42.4% in Data-Act-5 and 42.8% in Data-Act-
6. The observed improvements are reasonable be-
cause queuing and talking activities have relatively
stable group structures and interaction patterns, and
these improvements indicate that our proposed group
context feature captures the meaningful information
for group structure and interaction. DNN-Motion-
Scene-Group outperforms DNN-Motion-Scene by
17.9% in Data-Act-5 and 1.1% in Data-Act-6. It
also outperforms DNN-Motion-Group by 4.3% in
Data-Act-5 and 2.9% in Data-Act-6. This indicates
that both scene context information and group con-
text information contribute to the final performance
improvements of the combined feature. However,
the contribution rate of scene context information and
group context information may vary among different
datasets.
By comparing the accuracy of SVM classifier and
deep neural network model that is trained using the
same features, we are able to evaluate the discrimina-
tive power of the proposed deep model. Overall, the
accuracy of DNN based model outperforms the SVM
model by 13.3% in Data-Act-5 and by 11.1% in Data-
Act-6. This clearly indicates that our proposed DNN
model also contributes to higher performance of ac-
tivity recognition task.
Compare with State-of-the-art. We also compare
our results with other approaches that have state-of-
the-art performance on Collective Activity dataset.
For Data-Act-5, we compare our results with Spatio-
Temporal Volume descriptor of Choi et. al. (Choi
Human Activity Recognition using Deep Neural Network with Contextual Information
41
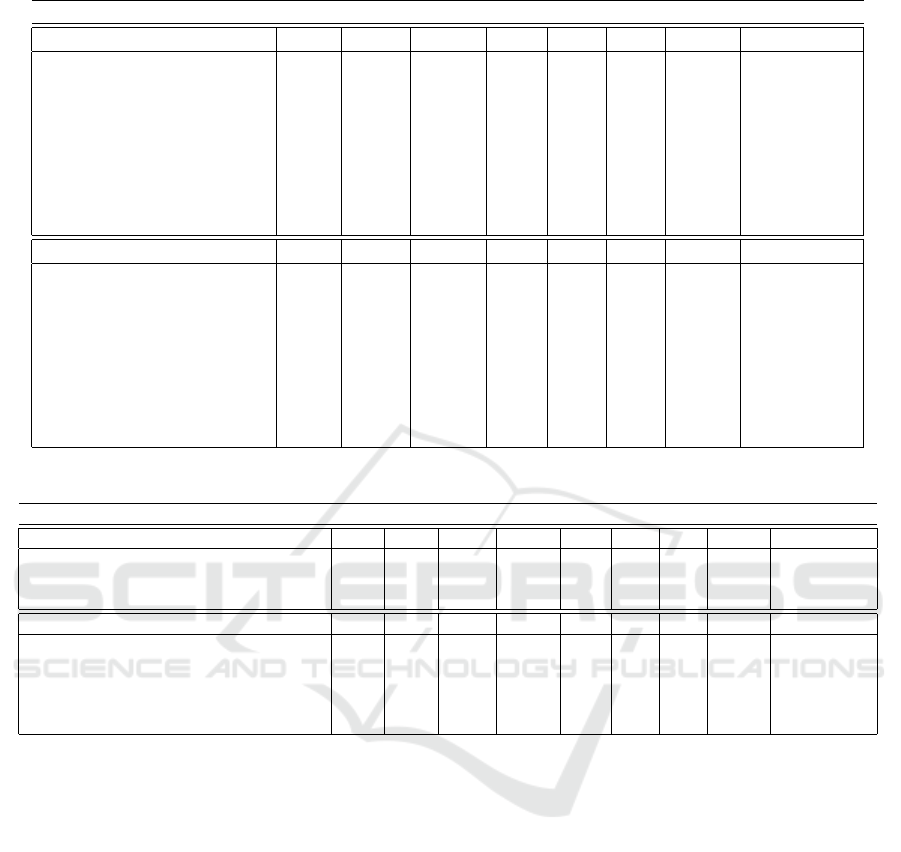
Table 2: Comparison with state-of-the-art approaches.
Accuracy(%)
5-Activites Walk Cross Queue Wait Talk Jog Dance Avg.(5 Act.)
SVM-Motion 36.2 64.8 52.0 28.3 20.5 - - 40.4
DNN-Motion 46.4 63.9 49.1 44.0 53.6 - - 51.4
SVM-Motion-Scene 42.5 65.2 65.7 43.3 51.0 - - 53.5
DNN-Motion-Scene 49.5 64.7 65.3 54.8 84.6 - - 64.8
SVM-Motion-Group 33.4 68.3 78.9 36.1 93.7 - - 62.1
DNN-Motion-Group 39.3 74.0 97.4 78.8 96.0 - - 77.1
SVM-Motion-Scene-Group 37.5 67.2 82.3 40.3 93.7 - - 64.2
DNN-Motion-Scene-Group 67.6 70.2 96.2 81.6 91.5 - - 81.4
6-Activites Walk Cross Queue Wait Talk Jog Dance Avg.(6 Act.)
SVM-Motion - 63.9 51.8 29.3 21.1 98.4 95.3 60.0
DNN-Motion - 78.6 57.4 45.8 56.1 93.1 95.3 71.0
SVM-Motion-Scene - 67.2 65.9 42.2 51.5 97.7 96.5 70.1
DNN-Motion-Scene - 86.5 99.6 80.2 79.0 98.4 97.8 90.2
SVM-Motion-Group - 75.2 79.1 46.9 88.9 99.9 99.7 81.6
DNN-Motion-Group - 75.6 99.2 70.9 98.9 90.1 96.2 88.5
SVM-Motion-Scene-Group - 83.1 81.9 50.6 93.4 99.9 99.7 84.8
DNN-Motion-Scene-Group - 85.4 97.9 72.6 99.6 96.4 96.1 91.3
Table 3: Comparison with state-of-the-art approaches.
Accuracy(%)
Approaches Year Walk Cross Queue Wait Talk Jog Dance Avg.(5 Act.)
Choi et. al. (Choi et al., 2009) 2009 57.9 55.4 63.3 64.6 83.6 - - 65.9
Lan et. al. (Lan et al., 2012) 2012 68.0 65.0 96.0 68.0 99.0 - - 79.1
Our Method (5 Act.) 67.6 70.2 96.2 81.6 91.5 - - 81.4
Approaches Year Walk Cross Queue Wait Talk Jog Dance Avg.(6 Act.)
Choi et. al. (Choi et al., 2011) 2011 - 76.5 78.5 78.5 84.1 94.1 80.5 82.0
Amer et. al. (Amer and Todorovic, 2011) 2011 - 69.9 96.8 74.1 99.8 87.6 70.2 83.1
Amer et. al. (Amer et al., 2012) 2012 - 77.2 95.4 78.3 98.4 89.4 72.3 85.1
Khai et. al. (Tran et al., 2015) 2015 - 60.6 89.1 80.9 93.1 93.4 95.4 85.4
Our Method (6 Act.) - 85.4 97.9 72.6 99.6 96.4 96.1 91.3
et al., 2009) and Action Context descriptor of Lan
et. al. (Lan et al., 2012). For Data-Act-6, the fol-
lowing methods are compared: the approach by Tran
et. al. (Tran et al., 2015) that uses group context
descriptor, the approach by Amer et. al. (Amer and
Todorovic, 2011) that uses a chain model for group
activities recognition and (Amer et al., 2012) that uti-
lize top-down/bottom-up inference for activity recog-
nition; and the approach by Choi et. al. (Choi et al.,
2011) that uses random forest for activities recogni-
tion.
The results are shown in Table 3. We can see that
our approach performs best in 3 out of 5 activities
in Data-Act-5, and 4 out of 6 activities in Data-Act-
6. Our approach also gives the best average accuracy
for both datasets. Finally, our approach outperforms
other approaches by 2% in Data-Act-5 and at least by
5% in Data-Act-6.
5 CONCLUSION
In conclusion, we propose a deep neural network
model for human activity recognition from video. The
input features of the deep network include motion fea-
ture and context feature. We design the scene prior
feature and scene context feature to capture the en-
vironment around the subject of interest global and
local levels. We demonstrate that our model is able
to outperform state-of-the-art human activity recog-
nition methods in the collective activities dataset.
REFERENCES
Amer, M. and Todorovic, S. (2011). A chains model for
localizing participants of group activities in videos.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
42

In Computer Vision (ICCV), 2011 IEEE International
Conference on, pages 786–793.
Amer, M. R., Xie, D., Zhao, M., Todorovic, S., and Zhu, S.-
C. (2012). Cost-sensitive top-down/bottom-up infer-
ence for multiscale activity recognition. In Computer
Vision–ECCV 2012, pages 187–200. Springer.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM: A library
for support vector machines. ACM Transactions on
Intelligent Systems and Technology, 2:27:1–27:27.
Choi, W. and Savarese, S. (2012). A unified framework
for multi-target tracking and collective activity recog-
nition. In Computer Vision–ECCV 2012, pages 215–
230. Springer.
Choi, W., Shahid, K., and Savarese, S. (2009). What are
they doing? : Collective activity classification us-
ing spatio-temporal relationship among people. In
Computer Vision Workshops (ICCV Workshops), 2009
IEEE 12th International Conference on, pages 1282–
1289.
Choi, W., Shahid, K., and Savarese, S. (2011). Learning
context for collective activity recognition. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision and Pattern Recognition.
Dieleman, S., Schluter, J., Raffel, C., Olson, E., Snderby,
S. K., Nouri, D., Maturana, D., Thoma, M., Bat-
tenberg, E., Kelly, J., Fauw, J. D., Heilman, M.,
diogo149, McFee, B., Weideman, H., takacsg84, pe-
terderivaz, Jon, instagibbs, Rasul, D. K., CongLiu,
Britefury, and Degrave, J. (2015). Lasagne: First re-
lease.
Ess, A., Leibe, B., Schindler, K., and Van Gool, L. (2008).
A mobile vision system for robust multi-person track-
ing. In Computer Vision and Pattern Recognition,
2008. CVPR 2008. IEEE Conference on, pages 1–8.
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward neural networks. In
International conference on artificial intelligence and
statistics, pages 249–256.
Hasan, M. and Roy-Chowdhury, A. K. (2014). Contin-
uous learning of human activity models using deep
nets. In Computer Vision–ECCV 2014, pages 705–
720. Springer.
Ji, S., Xu, W., Yang, M., and Yu, K. (2013). 3d convo-
lutional neural networks for human action recogni-
tion. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 35(1):221–231.
Karpathy, A., Toderici, G., Shetty, S., Leung, T., Suk-
thankar, R., and Fei-Fei, L. (2014). Large-scale video
classification with convolutional neural networks. In
Computer Vision and Pattern Recognition (CVPR),
2014 IEEE Conference on, pages 1725–1732. IEEE.
Lan, T., Wang, Y., Yang, W., Robinovitch, S. N., and Mori,
G. (2012). Discriminative latent models for recog-
nizing contextual group activities. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
34(8):1549–1562.
Laptev, I., Marszałek, M., Schmid, C., and Rozenfeld,
B. (2008a). Learning realistic human actions from
movies. In Computer Vision and Pattern Recognition,
2008. CVPR 2008. IEEE Conference on, pages 1–8.
IEEE.
Laptev, I., Marszalek, M., Schmid, C., and Rozenfeld,
B. (2008b). Learning realistic human actions from
movies. In Computer Vision and Pattern Recognition,
2008. CVPR 2008. IEEE Conference on, pages 1–8.
Nesterov, Y. et al. (2007). Gradient methods for minimizing
composite objective function. Technical report, UCL.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recogniz-
ing human actions: a local svm approach. In Pat-
tern Recognition, 2004. ICPR 2004. Proceedings of
the 17th International Conference on, volume 3, pages
32–36 Vol.3.
Tran, K. N., Bedagkar-Gala, A., Kakadiaris, I. A., and Shah,
S. K. (2013). Social cues in group formation and local
interactions for collective activity analysis. In VIS-
APP, pages 539–548.
Tran, K. N., Kakadiaris, I. A., and Shah, S. K. (2012).
Part-based motion descriptor image for human action
recognition. Pattern Recognition, 45(7):2562–2572.
Tran, K. N., Yan, X., Kakadiaris, I. A., and Shah, S. K.
(2015). A group contextual model for activity recog-
nition in crowded scenes. In VISAPP.
Wang, X. and Ji, Q. (2015). Video event recognition with
deep hierarchical context model. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 4418–4427.
Was, J., Gudowski, B., and Matuszyk, P. J. (2006). Social
distances model of pedestrian dynamics. In Cellular
Automata, pages 492–501. Springer.
Wei, L. and Shah, S. K. (2015). Subject centric group fea-
ture for person re-identification. In 2015 IEEE Con-
ference on Computer Vision and Pattern Recognition
Workshops (CVPRW), pages 28–35.
Wei, L. and Shah, S. K. (2016). Person re-identification
with spatial appearance group feature. In 2016 IEEE
Symposium on Technologies for Homeland Security
(HST), pages 1–6.
Weinland, D., Ronfard, R., and Boyer, E. (2011). A sur-
vey of vision-based methods for action representation,
segmentation and recognition. Computer Vision and
Image Understanding, 115(2):224–241.
Zhou, B., Lapedriza, A., Xiao, J., Torralba, A., and Oliva,
A. (2014). Learning deep features for scene recog-
nition using places database. In Advances in Neural
Information Processing Systems, pages 487–495.
Human Activity Recognition using Deep Neural Network with Contextual Information
43
