
From Depth Data to Head Pose Estimation: A Siamese Approach
Marco Venturelli, Guido Borghi, Roberto Vezzani and Rita Cucchiara
University of Modena and Reggio Emilia, DIEF, Via Vivarelli 10, Modena, Italy
Keywords:
Head Pose Estimation, Deep Learning, Depth Maps, Automotive.
Abstract:
The correct estimation of the head pose is a problem of the great importance for many applications. For
instance, it is an enabling technology in automotive for driver attention monitoring. In this paper, we tackle the
pose estimation problem through a deep learning network working in regression manner. Traditional methods
usually rely on visual facial features, such as facial landmarks or nose tip position. In contrast, we exploit a
Convolutional Neural Network (CNN) to perform head pose estimation directly from depth data. We exploit a
Siamese architecture and we propose a novel loss function to improve the learning of the regression network
layer. The system has been tested on two public datasets, Biwi Kinect Head Pose and ICT-3DHP database. The
reported results demonstrate the improvement in accuracy with respect to current state-of-the-art approaches
and the real time capabilities of the overall framework.
1 INTRODUCTION
Head pose estimation provides a rich source of infor-
mation that can be used in several fields of computer
vision, like attention and behavior analysis, saliency
prediction and so on. In this work, we focus in par-
ticular on the automotive field: several works in lit-
erature show that head pose estimation is one of the
key elements for driver behavior and attention mon-
itoring analysis. Moreover, the recent introduction
of semi-autonomous and autonomous driving vehi-
cles and their coexistence with traditional cars is go-
ing to increase the already high interest on driver at-
tention studies. In this cases, human drivers have to
take driving algorithms under controls, also for legal
related issues (Rahman et al., 2015).
Driver’s hypo-vigilance is one of the most princi-
pal cause of road crashes (Alioua et al., 2016). As
reported by the official US government website
1
, dis-
tracting driving is responsible for 20-30% of road
deaths: it is reported that about 18% of injury crashes
were caused by distraction, more than 3000 people
were killed in 2011 in a crash involving a distracted
driver, and distraction is responsible for 11% of fatal
crashes of drivers under the age of twenty. Distraction
during driving activity is defined by National Safety
Administration (NHTSA) as ”an activity that could
divert a person’s attention away from the primary task
of driving”. (Craye and Karray, 2015) defines three
1
http://www.distraction.gov/index.html
classes of driving distractions: 1) manual distraction:
driver’s hands are not on the wheel; examples of this
kind of activity are incorrect use of infotainment sys-
tem (radio, GPS navigation device and others) or text
messaging. 2) visual distraction: driver’s eyes are not
looking at the road, but, for example, at the smart-
phone screen or a newspaper. 3) cognitive distraction:
driver’s attention is not focused on driving activity;
this could occur due to torpor, stress, and bad physical
conditions in general or, for example, if talking with
passengers. Smartphone abuse during driving activ-
ity leads to all of the three distraction categories men-
tioned above; in fact, that is one of the most important
cause of fatal driving distraction, with about 18% of
fatal driver accidents in North America, as reported
by NHTSA.
Several works have been proposed for in-car
safety and they can be divided by the type of signal
used (Alioua et al., 2016).
1) Physiological signals: special sensors as electroen-
cephalography (EEG), electrocardiography (ECG) or
electromyography (EMG) are places inside the cock-
pit to acquire signals from driver’s body; this kind of
solution is very intrusive and a body-sensor contact is
strictly required;
2) Vehicle signals: vehicle parameters like velocity
changes, steering wheel motion, acquired from car
bus, can reveal abnormal driver actions;
3) Physical signals: image processing techniques are
exploited to investigate driver vigilance through facial
194
Venturelli M., Borghi G., Vezzani R. and Cucchiara R.
From Depth Data to Head Pose Estimation: A Siamese Approach.
DOI: 10.5220/0006104501940201
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 194-201
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

features, eye state, head pose or mouth state; these
methods are non-intrusive, thus image are acquired
from inside cockpit cameras.
Taking into account the above exposed elements,
some characteristics can be elected as crucial for a re-
liable and implementable head pose estimation frame-
work, also related to the placement and the choice of
the most suitable sensing device:
• Light Invariance: the framework should be re-
liable on each weather condition that could dra-
matically changes the type of illumination inside
the car (shining sun and clouds, in addition to
sunrises, sunsets, nights etc.). Depth cameras are
proven to be less prone to fail in these conditions
than classical RGB or stereo sensors;
• Non Invasive: it is fundamental that acquisition
devices do not impede driver’s movements dur-
ing driving activity; in this regard, recently many
car industries have placed sensors inside steering
wheel or seats to passively monitor driver’s phys-
iological conditions;
• Direct Estimation: the presence of severe occlu-
sions or the high variability of driver’s body pose
could make facial feature detection extremely
challenging and prone to failure; besides, no ini-
tialization phase is welcome.
• Real Time Performances: in automotive context
an attention monitoring system is useful only if
can immediately detect anomalies in driver’s be-
havior;
• Small Size: acquisition device has to been inte-
grated inside cockpit, often in a particular position
(like next rear-view mirror): recently, the release
of several low cost, accurate and small sized 3D
sensors open new scenarios.
In this work, we aim at exploiting a deep architecture
to perform in real time head pose regression, directly
from single-frame depth data. In particular, we use
a Siamese network to improve our training phase by
learning more discriminative features, and optimize
our regression layer network loss function.
2 RELATED WORK
(Murphy-Chutorian and Trivedi, 2009) shows that
head pose estimation is the goal of several works in
the literature. Current approaches can be divided de-
pending on the type of data they rely on, RGB images
(2D information), depth maps data (3D information),
or both. In general, methods for head pose estimation
relying solely on RGB images are sensitive to illumi-
nation, partial occlusions and lack of features (Fanelli
et al., 2011), while depth-based approaches are lack-
ing of texture and color information.
Several works in the literature proposed to use
Convolutional Neural Networks with depth data, but
especially in skeleton body pose estimation (Crabbe
et al., 2015) or action recognition tasks (Ji et al.,
2013). These works reveal how techniques like back-
ground subtraction, depth maps normalization and
data augmentation could influence deep architectures
performance. Recently, (Doumanoglou et al., 2016)
exploits Siamese Networks to perform object pose es-
timation, applying a novel loss function that can boost
the performance of a regression network layer. Other
works, like (Hoffer and Ailon, 2015; Sun et al., 2014),
exploit a Siamese approach in deep architecture to
improve network learning capabilities and to perform
human body joint identification.
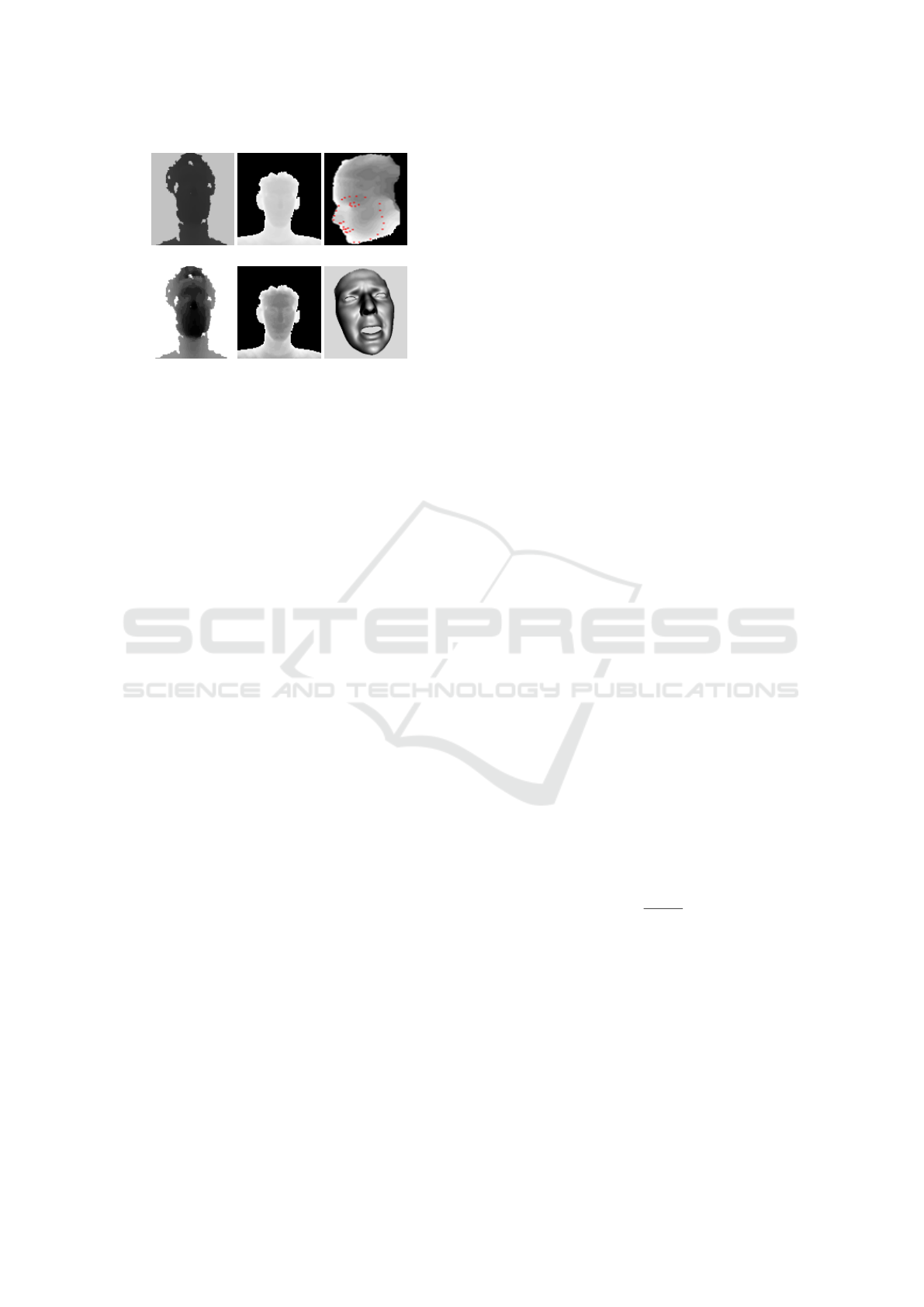
Several works rely only on depth data. As Figure
1 shows, the global quality of depth images strictly
depends by the technology of the acquisition device.
In (Papazov et al., 2015) shapes of 3D surfaces are
encoded in a novel triangular surface patch descrip-
tor to map an input depth with the most similar ones
that were computed from synthetic head models, dur-
ing a precedent a training phase. (Kondori et al.,
2011) exploits a least-square minimization of the dif-
ference between the rate prediction and the measured
rate of change of input depth. Usually, depth data are
characterized by low quality. Starting from this as-
sumption, in (Malassiotis and Strintzis, 2005) is pro-
posed a method designed to work on low quality depth
data to perform head localization and pose estima-
tion; this method relies on an accurate nose local-
ization. In (Fanelli et al., 2011) a real time frame-
work based on Random Regression Forests is pro-
posed, to perform head pose estimation directly from
depth images, without exploiting any facial features.
In (Padeleris et al., 2012) Particle Swarm Optimiza-
tion is used to tackle the head pose estimation, treated
as an optimization problem. This method requires
an initial frame to construct the reference head pose
from depth data; limited real time performance are
obtained thanks to a GPU.
(Breitenstein et al., 2008) tackles the problem of
large head pose variations, partial occlusions and fa-
cial expressions from depth images: several methods
present in the literature have poor performance with
these factors. In the work of Bretenstein et al. the
main issue is that the nose must be always visible,
due to this method uses geometric features to generate
nose candidates which suggest head position hypoth-
esis. The alignment error computation is demanded
to a dedicated GPU in order to work in real time.
(Chen et al., 2016) achieves results very close to
From Depth Data to Head Pose Estimation: A Siamese Approach
195
(a) (b) (c)
(d) (e) (f)
Figure 1: Examples of depth images taken by different ac-
quisition devices. (a) is acquired by Microsoft Kinect based
on structured-light technology (BIWI dataset (Fanelli et al.,
2011)). (b) is obtained thanks to Microsoft Kinect One, a
time-of-flight 3D scanner; (d)-(e) are the correspondent im-
ages, after contrast stretching elaboration to enhance facial
clues. Images (c)-(f) come from synthetic dataset (Fanelli
et al., 2010; Baltru
ˇ
saitis et al., 2012).
state-of-art results, even if in this work the problem of
head pose estimation is token on extremely low reso-
lution RGB images. HOG features and a Gaussian
locally-linear mapping model are used in (Drouard
et al., 2015). These models are learned using train-
ing data, to map the face descriptor onto the space of
head poses and to predict angles of head rotation.
A Convolutional Neural Network (CNN) is used
in (Ahn et al., 2014) to perform head pose estima-
tion from RGB images. This work shows that a CNN
properly works even in challenging light conditions.
The network inputs are RGB images acquired from
a monocular camera: this work is one of the first at-
tempt to use deep learning techniques in head pose
estimation problem. This architecture is exploited in
a data regression manner to learn the mapping func-
tion between visual appearance and three dimensional
head estimation angles. Despite the use of deep learn-
ing techniques, system working real time with the aid
of a GPU. A CNN trained on synthetic RGB images
is used also in (Liu et al., ). Recently, the use of
synthetic dataset is increasing to support deep learn-
ing approaches that basically require huge amount of
data. A large part of works relies on both 2D and
3D data. In (Seemann et al., 2004) a neural network
is used to combine depth information, acquired by a
stereo camera, and skin color histograms derived from
RGB images. The user face has to be detected in
frontal pose at the beginning of framework pipeline
to initialize the color skin histograms. In (Baltru
ˇ
saitis
et al., 2012) a 3D constrained local method for ro-
bust facial feature tracking under varying poses is pro-
posed. It is based on the integration both depth and
intensity information.
(Bleiweiss and Werman, 2010) used time-of-flight
depth data to perform a real time head pose estima-
tion, combined with color information. The compu-
tation work is demanded to a dedicated GPU. (Yang
et al., 2012) elaborated HOG features both on 2D and
3D data: a Multi Layer Perceptron is then used for
feature classification. Also the method presented in
(Saeed and Al-Hamadi, 2015) is based on RGB and
depth HOG, but a linear SVM is used for classifi-
cation task. Ghiass et al. (Ghiass et al., 2015) per-
formed pose estimation by fitting a 3D morphable
model which included pose parameter, starting both
from RGB and depth data. This method relies on face
detector of Viola and Jones (Viola and Jones, 2004).
3 HEAD POSE ESTIMATION
The described approach aims at estimating pitch, roll
and yaw angles of the head/face with respect to the
camera reference frame. A depth image is provided
as input and a Siamese CNN is used to build an addi-
tional loss function which improves the strength of the
training phase. Head detection and localization are
supposed to be available. No additional information
such as facial landmarks, nose tip position, skin color
and so on are taken into account, differently from
other methods like (Seemann et al., 2004; Malassio-
tis and Strintzis, 2005; Breitenstein et al., 2008). The
network prediction is given in terms of Euler angles,
even if the task is challenging due to problems such
periodicity (Yi et al., 2015) and the non-continuous
nature of Euler angles (Kendall et al., 2015).
3.1 Head Acquisition
First of all, face images are cropped using a dynamic
window. Given the center x
c
, y
c
of the face, each im-
age is cropped at a rectangular box centered in x
c
, y
c
,
with width and height computed as:
w, h =
f
x,y
· R
Z
, (1)
where f
x,y
are the horizontal and vertical focal lengths
(in pixels) of the acquisition device, R is the width of
a generic face (300 mm in our experiments) and Z is
the distance between the acquisition device and the
user obtained from the depth image. The output is
an image which contains a partially centered face and
some part of background. Then, the cropped images
are resized to 64x64 pixels. Input image values are
normalized to set their mean and the variance to 0 and
1, respectively. This normalization is also required by
the specific activation function of the network layers.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
196

Figure 2: The Siamese architecture proposed for training phase.
3.2 Training Phase
The proposed architecture is depicted in Figure 2. A
Siamese architecture consists in two or more sepa-
rate networks, that could be identical — as in our
case— and are simultaneously trained. It is impor-
tant to note that this Siamese architecture is used only
during training phase, while a single network is used
during the testing. Inspired by (Ahn et al., 2014), each
single neural network has a shallow deep architecture
in order to obtain real time performance and good ac-
curacy. Each network takes images of 64x64 pixels
as input and it is composed of 5 convolutional lay-
ers. The first four layers have 30 filters each, whereas
the last one has 120 filters. Max-pooling is conducted
only three times, due to the relative small size of in-
put images. At the end of the network there are three
fully connected layers, with 120, 84 and 3 neurons,
respectively. The last 3 neurons correspond to the
three angles (yaw, pitch and roll) of the head. The last
fully connected layer works in regression. The size
of the convolution filters are 5x5, 4x4, 3x3, depend-
ing on the layer. The activation function is the hyper-
bolic tangent (tanh): in this way, the network can map
output [−∞, +∞] → [−1, +1], even if ReLU tends to
train faster that other activation functions (Krizhevsky
et al., 2012). The network is able to output continu-
ous instead of discrete values. We adopt the Stochas-
tic Gradient Descent (SGD) as in (Krizhevsky et al.,
2012) to solve the back-propagation.
Each single neural network has a L2 loss:
L
cnn
=
n
∑
i
ky
i
− f (x
i
)k
2
2
, (2)
where y
i
is the ground truth information (expressed
in roll, pitch and yaw Euler angles) and f (x
i
) is the
network prediction.
Siamese network takes in input pair of images:
considering a dataset with about N frames, a huge
number
N
2
of possible pairs can be used. Only pairs
with at least 30 degrees of difference between all head
angles are selected.
Exploiting Siamese architecture, an additional
loss function based on both network outputs can be
defined. This loss combines each of the two regres-
sion losses and it is the L2 distance between the pre-
diction difference and the ground truth difference:
L
siam
=
∑
n
i
kd
cnn
(x
i
) − d
gt
(x
i
)k
2
2
d
cnn
(x
i
) = f
1
(x) − f
2
(x)
d
gt
(x
i
) = y
1
− y
2
, (3)
where d
cnn
(x
i
)
k
is the difference between the outputs
f
i
(x)of the two single networks and d
gt
(x
i
) the differ-
ence between the ground truth values of the pair.
The final loss is a combination of the losses func-
tion of the 2 single networks L
cnn,1
, L
cnn,2
and the loss
of the Siamese match L
siam
:
L = L
cnn,1
+ L
cnn,2
+ L
siam
(4)
Each single network has been trained with a batch
size of 64, a decay value of 5
−4
, a momentum value
of 9
−1
and a learning rate set to 10
−1
, decreased up
to 10
−3
in the final epochs (Krizhevsky et al., 2012).
Ground truth angles are normalized to [−1, +1].
We performed data augmentation to increment the
size of training input images and to avoid over fit-
ting. Additional patches are randomly cropped from
each corner of the input images and from the head
center; besides, patches are also extracted by crop-
ping input images starting from the bottom, upper,
left and right and adding Gaussian noise. Other ad-
ditional input samples are created thanks to the pair
input system: different pairs are different inputs for
the Siamese architecture, and so also for each sin-
gle network. Besides, data augmentation conducted
in this manner produces samples with occlusion, and
thus our method could be reliable against head occlu-
sions.
From Depth Data to Head Pose Estimation: A Siamese Approach
197

Table 1: Results on Biwi Dataset: pitch, roll and yaw are reported in Euler angles.
Method Data Pitch Roll Yaw
(Saeed and Al-Hamadi, 2015) RGB+RGB-D 5.0 ± 5.8 4.3 ± 4.6 3.9 ± 4.2
(Fanelli et al., 2011) RGB-D 8.5 ± 9.9 7.9 ± 8.3 8.9 ± 13.0
(Yang et al., 2012) RGB+RGB-D 9.1 ± 7.4 7.4 ± 4.9 8.9 ± 8.2
(Baltru
ˇ
saitis et al., 2012) RGB+RGB-D 5.1 11.2 6.29
(Papazov et al., 2015) RGB-D 3.0 ± 9.6 2.5 ± 7.4 3.8 ± 16.0
Our RGB-D 2.8 ± 3.2 2.3 ± 2.9 3.6 ± 4.1
Our+Siamese RGB-D 2.3 ± 2.7 2.1 ± 2.2 2.8 ± 3.3
4 EXPERIMENTAL RESULTS
Experimental results of the proposed approach are
given using two public Kinect datasets for head pose
estimation, namely Biwi Kinect Head Pose Database
and ICT-3DHP database. Both of them contains
RGB and depth data. To check the reliability of pro-
posed method we performed a cross-dataset valida-
tion, training the network on the first dataset and test-
ing on the second one. The evaluation metric is based
on the Mean Average Error (MAE) between the abso-
lute difference in angle between network predictions
and ground truth.
4.1 Biwi Kinect Head Pose Database
Introduced in (Fanelli et al., 2013), it is explicitly
designed for head pose estimation from depth data.
About 15000 upper body images of 20 people (14
males and 6 females; 4 people were recorded twice)
are present. The head rotation spans about ±75 deg
for yaw, ±60 deg for pitch and ±50 deg for roll. Both
RGB and depth images are acquired sitting in front
a stationary Microsoft Kinect, with a resolution of
640x480. Besides ground truth pose angles, calibra-
tion matrix and head center - the position of the nose
tip - are given. Depth images are characterized by vi-
sual artifacts, like holes (invalid values in depth map).
In the original work (Fanelli et al., 2011), the total
number of samples used for training and testing and
the subject selection is not clear. We use sequences
11 and 12 to test our network, which correspond to
not repeated subjects. Some papers use own method
to collect results (e.g. (Ahn et al., 2014)), so their
results are not reported and analyzed.
4.2 ICT-3DHP Database
ICT-3DHP Dataset (Baltru
ˇ
saitis et al., 2012) is a head
pose dataset, collected using Microsoft Kinect sensor.
It contains about 14000 frames (both intensity and
depth), divided into 10 sequences. The resolution is
640x480. The ground truth is annotated using a Pol-
hemus Fastrack flock of birds tracker, that require a
showy white cap, well visible in both RGB and RGB-
D frames. This dataset is not oriented for deep learn-
ing, because of its small size and the presence of few
subjects.
4.3 Quantitative Evaluation
The performance of the proposed head pose estima-
tion are compared with a baseline system. To this
aim, we trained a single network with the structure
of one Siamese component. Input data and data aug-
mentation are the same on both cases. In addition,
the results are also compared with other state-of-the-
art techniques. As above mentioned, the training has
been done on Biwi dataset (2 subjects used for test),
while the testing phases also exploited the ICT-3DHP
dataset.
Table 1 reports the experimental results obtained
on Biwi Kinect Head Pose Dataset. The evalua-
tion protocol is the same proposed in (Fanelli et al.,
2011). Results reported in Table 1 show that our
method overcomes other state-of-the-art techniques,
even those working on both RGB and depth data.
Table 2 reports the results on ICT-3DHP Dataset;
the values related to (Fanelli et al., 2011) were taken
from (Crabbe et al., 2015). On this dataset, the dy-
namic face crop algorithm is degraded due to an im-
precise head center location provided in the available
ground truth. The authors published the position of
the device exploited to capture the head angle in-
stead of the head itself. Thus, part of the head cen-
ter locations are inaccurate. To highlight this prob-
lem, we report that (Baltru
ˇ
saitis et al., 2012) had a
substantial improvement of using GAVAM (Morency
et al., 2008), an adaptive key frame based differential
tracker, over all other trackers. Their method in this
case reports an absolute error of 2.9 for yaw, 3.14 for
pitch and 3.17 for roll. Finally, we highlight the ben-
efit of Siamese training phase. In fact, the proposed
approach perform better than the single network as
well as the other competitors, even those which rely
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
198
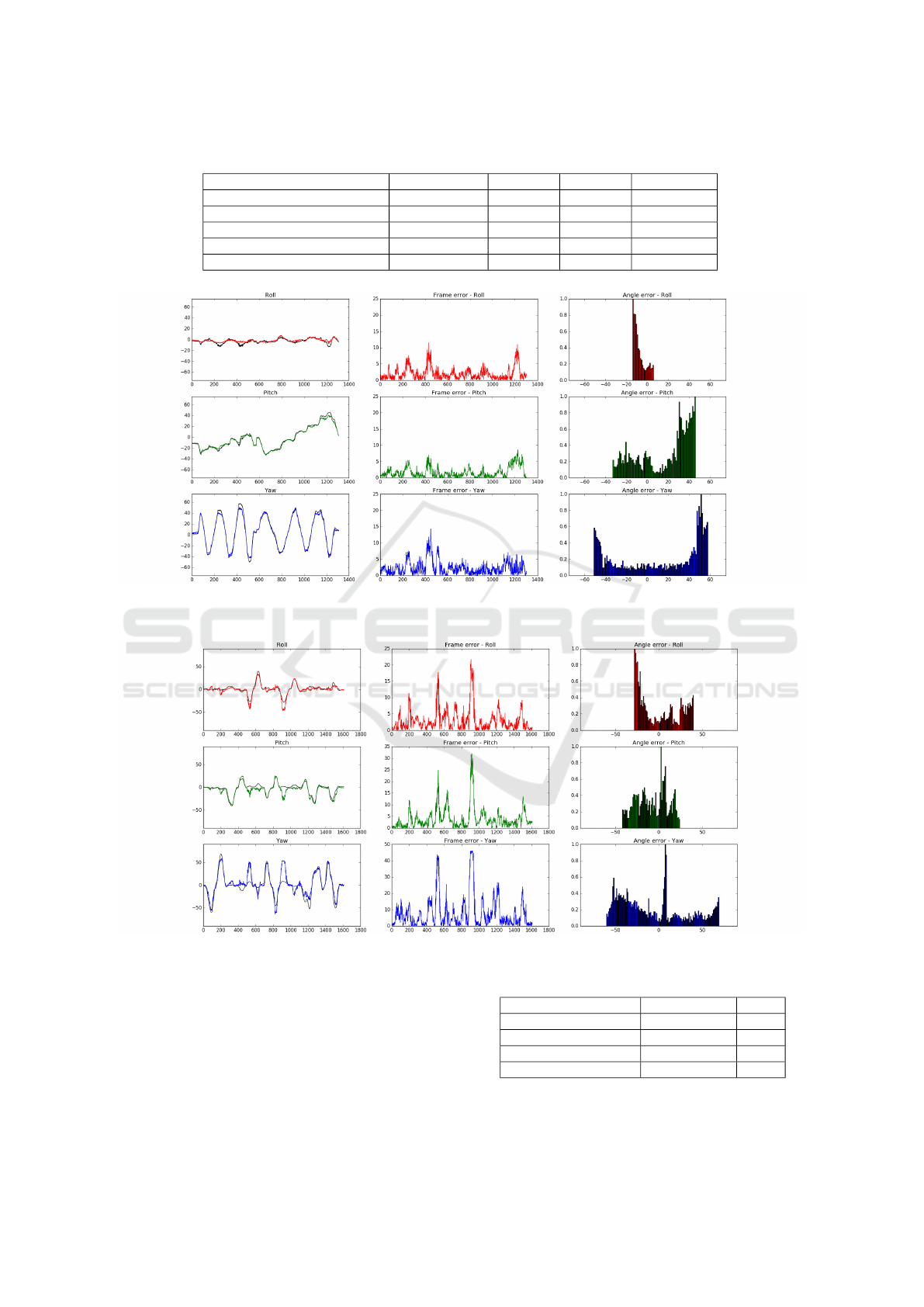
Table 2: Results on ICT-3DHP Dataset: pitch, roll and yaw are reported in Euler angles.
Method Data Pitch Roll Yaw
(Saeed and Al-Hamadi, 2015) RGB+RGB-D 4.9 ± 5.3 4.4 ± 4.6 5.1 ± 5.4
(Fanelli et al., 2011) RGB-D 5.9 ± 6.3 - 6.3 ± 6.9
(Baltru
ˇ
saitis et al., 2012) RGB+RGB-D 7.06 10.48 6.90
Our RGB-D 5.5 ± 6.5 4.9 ± 5.0 10.8 ± 11.0
Our+Siamese RGB-D 4.5 ± 4.6 4.4 ± 4.5 9.8 ± 10.1
Figure 3: Experimental results on Biwi dataset: ground truth is black. The second column reports the angle error per frame,
while the last column reports histograms that highlight the errors at specific angles.
Figure 4: Experimental results on ICT-3DHP dataset: see Figure 3 for explanation.
on both RGB and RGB-D data. The prediction of roll
angles is accurate, even if in the second dataset there
is a lack of training data images with roll angles.
Figure 3 and Figure 4 report angle frame per error
and errors at specific angles for both dataset.
Figure 5 shows an example of working framework
for head pose estimation in real time: head center is
taken thanks to ground truth data; the face is cropped
Table 3: Performance evaluation (fps).
Method Time GPU
(Fanelli et al., 2011) 40 ms/frame x
(Papazov et al., 2015) 76 ms/frame
(Yang et al., 2012) 100 ms/frame
Our 10 ms/frame x
from raw depth map (in the center image, the blue
rectangle) and in the right frame yaw, pitch and roll
From Depth Data to Head Pose Estimation: A Siamese Approach
199

Figure 5: The first and the third columns show RGB frames, the second and the fourth the correspondent depth map frame
with a red rectangle that reveals the crop for the face extraction (see Section 3.1). The blue arrow is ground truth, while the
red one is our prediction. Numerical angle prediction is reported on the top. Images taken from Biwi Dataset.
angles are shown.
Total time of processing on a CPU (Core i7-4790
3.60GHz) is 11.8 s and on a GPU (NVidia Quadro
k2200) is 0.146 s, computed on 250 frames from Biwi.
5 CONCLUSION
We present a innovative method to directly extract
head angles from depth images in real time, exploit-
ing a deep learning approach. Our technique aim to
deal with two main issue of deep architectures in gen-
eral, and CNNs in particular: the difficulty to solve
regression problems and the traditional heavy compu-
tational load that compromise real time performance
for deep architectures. Our approach is based on Con-
volutional Neural Network with shallow deep archi-
tecture, to preserve time performance, and is designed
to resolve a regression task.
There is rich possibility for extensions thanks to
the flexibility of our approach: in future work we plan
to integrate temporal coherence and stabilization in
the deep learning architecture, maintaining real time
performance, incorporate RGB or infrared data to in-
vestigate the possibility to have a light invariant ap-
proach even in particular conditions (e.g. automotive
context). Head localization through deep approach
could be studied in order to develop a complete frame-
work that can detect, localize and estimate head pose
inside a cockpit.
REFERENCES
Ahn, B., Park, J., and Kweon, I. S. (2014). Real-time head
orientation from a monocular camera using deep neu-
ral network. In Asian Conference on Computer Vision,
pages 82–96. Springer.
Alioua, N., Amine, A., Rogozan, A., Bensrhair, A., and Rz-
iza, M. (2016). Driver head pose estimation using ef-
ficient descriptor fusion. EURASIP Journal on Image
and Video Processing, 2016(1):1–14.
Baltru
ˇ
saitis, T., Robinson, P., and Morency, L.-P. (2012). 3d
constrained local model for rigid and non-rigid facial
tracking. In Computer Vision and Pattern Recogni-
tion (CVPR), 2012 IEEE Conference on, pages 2610–
2617. IEEE.
Bleiweiss, A. and Werman, M. (2010). Robust head pose
estimation by fusing time-of-flight depth and color.
In Multimedia Signal Processing (MMSP), 2010 IEEE
International Workshop on, pages 116–121. IEEE.
Breitenstein, M. D., Kuettel, D., Weise, T., Van Gool, L.,
and Pfister, H. (2008). Real-time face pose estimation
from single range images. In Computer Vision and
Pattern Recognition, 2008. CVPR 2008. IEEE Con-
ference on, pages 1–8. IEEE.
Chen, J., Wu, J., Richter, K., Konrad, J., and Ishwar, P.
(2016). Estimating head pose orientation using ex-
tremely low resolution images. In 2016 IEEE South-
west Symposium on Image Analysis and Interpretation
(SSIAI), pages 65–68.
Crabbe, B., Paiement, A., Hannuna, S., and Mirmehdi,
M. (2015). Skeleton-free body pose estimation from
depth images for movement analysis. In Proc. of the
IEEE International Conference on Computer Vision
Workshops, pages 70–78.
Craye, C. and Karray, F. (2015). Driver distraction de-
tection and recognition using RGB-D sensor. CoRR,
abs/1502.00250.
Doumanoglou, A., Balntas, V., Kouskouridas, R., and Kim,
T. (2016). Siamese regression networks with efficient
mid-level feature extraction for 3d object pose estima-
tion. CoRR, abs/1607.02257.
Drouard, V., Ba, S., Evangelidis, G., Deleforge, A., and Ho-
raud, R. (2015). Head pose estimation via probabilis-
tic high-dimensional regression. In Proc. of IEEE In-
ternational Conference on Image Processing (ICIP),
pages 4624–4628.
Fanelli, G., Dantone, M., Gall, J., Fossati, A., and Van Gool,
L. (2013). Random forests for real time 3d face
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
200

analysis. International Journal of Computer Vision,
101(3):437–458.
Fanelli, G., Gall, J., Romsdorfer, H., Weise, T., and Gool,
L. V. (2010). A 3-d audio-visual corpus of affective
communication. IEEE Transactions on Multimedia,
12(6):591 – 598.
Fanelli, G., Gall, J., and Van Gool, L. (2011). Real time
head pose estimation with random regression forests.
In Computer Vision and Pattern Recognition (CVPR),
2011 IEEE Conference on, pages 617–624. IEEE.
Ghiass, R. S., Arandjelovi
´
c, O., and Laurendeau, D. (2015).
Highly accurate and fully automatic head pose estima-
tion from a low quality consumer-level rgb-d sensor.
In Proc. of the 2nd Workshop on Computational Mod-
els of Social Interactions: Human-Computer-Media
Communication, pages 25–34. ACM.
Hoffer, E. and Ailon, N. (2015). Deep metric learning us-
ing triplet network. In Proc. of Int’l Workshop on
Similarity-Based Pattern Recognition, pages 84–92.
Springer.
Ji, S., Xu, W., Yang, M., and Yu, K. (2013). 3d convolu-
tional neural networks for human action recognition.
IEEE Transactions on pattern analysis and machine
intelligence, 35(1):221–231.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-dof camera re-
localization. In Proc. of the IEEE Int’l Conf. on Com-
puter Vision, pages 2938–2946.
Kondori, F. A., Yousefi, S., Li, H., Sonning, S., and Son-
ning, S. (2011). 3d head pose estimation using the
kinect. In Wireless Communications and Signal Pro-
cessing (WCSP), 2011 International Conference on,
pages 1–4. IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Liu, X., Liang, W., Wang, Y., Li, S., and Pei, M. 3d
head pose estimation with convolutional neural net-
work trained on synthetic images.
Malassiotis, S. and Strintzis, M. G. (2005). Robust real-
time 3d head pose estimation from range data. Pattern
Recognition, 38(8):1153–1165.
Morency, L.-P., Whitehill, J., and Movellan, J. (2008). Gen-
eralized adaptive view-based appearance model: In-
tegrated framework for monocular head pose estima-
tion. In Proc. of 8th IEEE Int’l Conf. on Automatic
Face & Gesture Recognition, 2008. FG’08., pages 1–
8. IEEE.
Murphy-Chutorian, E. and Trivedi, M. M. (2009). Head
pose estimation in computer vision: A survey. IEEE
Trans. Pattern Anal. Mach. Intell., 31(4):607–626.
Padeleris, P., Zabulis, X., and Argyros, A. A. (2012). Head
pose estimation on depth data based on particle swarm
optimization. In 2012 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 42–49. IEEE.
Papazov, C., Marks, T. K., and Jones, M. (2015). Real-time
3d head pose and facial landmark estimation from
depth images using triangular surface patch features.
In Proc. of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 4722–4730.
Rahman, H., Begum, S., and Ahmed, M. U. (2015). Driver
monitoring in the context of autonomous vehicle.
Saeed, A. and Al-Hamadi, A. (2015). Boosted human head
pose estimation using kinect camera. In Image Pro-
cessing (ICIP), 2015 IEEE International Conference
on, pages 1752–1756. IEEE.
Seemann, E., Nickel, K., and Stiefelhagen, R. (2004). Head
pose estimation using stereo vision for human-robot
interaction. In FGR, pages 626–631. IEEE Computer
Society.
Sun, Y., Chen, Y., Wang, X., and Tang, X. (2014). Deep
learning face representation by joint identification-
verification. In Advances in Neural Information Pro-
cessing Systems, pages 1988–1996.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57(2):137–154.
Yang, J., Liang, W., and Jia, Y. (2012). Face pose estima-
tion with combined 2d and 3d hog features. In Pattern
Recognition (ICPR), 2012 21st International Confer-
ence on, pages 2492–2495. IEEE.
Yi, K. M., Verdie, Y., Fua, P., and Lepetit, V. (2015). Learn-
ing to assign orientations to feature points. arXiv
preprint arXiv:1511.04273.
From Depth Data to Head Pose Estimation: A Siamese Approach
201
