
Color-based and Rotation Invariant Self-similarities
Xiaohu Song, Damien Muselet and Alain Tremeau
Univ. Lyon, UJM-Saint-Etienne, CNRS, LaHC UMR 5516, F-42023, Saint-Etienne, France
Keywords:
Color Descriptor, Self-similarity, Classification, Invariance.
Abstract:
One big challenge in computer vision is to extract robust and discriminative local descriptors. For many
applications such as object tracking, image classification or image matching, there exist appearance-based
descriptors such as SIFT or learned CNN-features that provide very good results. But for some other applica-
tions such as multimodal image comparison (infra-red versus color, color versus depth, ...) these descriptors
failed and people resort to using the spatial distribution of self-similarities. The idea is to inform about the
similarities between local regions in an image rather than the appearances of these regions at the pixel level.
Nevertheless, the classical self-similarities are not invariant to rotation in the image space, so that two rotated
versions of a local patch are not considered as similar and we think that many discriminative information is
lost because of this weakness. In this paper, we present a method to extract rotation-invariant self similarities.
In this aim, we propose to compare color descriptors of the local regions rather than the local regions them-
selves. Furthermore, since this comparison informs us about the relative orientations of the two local regions,
we incorporate this information in the final image descriptor in order to increase the discriminative power of
the system. We show that the self similarities extracted by this way are very discriminative.
1 INTRODUCTION
Evaluating self-similarities within an image consists
in comparing local patches from this image in or-
der to determine, for example, the patch pairs that
look similar. This information is used for super-
resolution (Glasner et al., 2009; Chih-Yuan et al.,
2011), denoising (Zontak and Irani, 2011), inpaint-
ing (Wang et al., 2014), ... The spatial distribution of
the self-similarities within each image is also a ro-
bust and discriminative descriptor that is very use-
ful in some applications. Indeed, in order to com-
pare images that look very different because of light
variations, multi-modality (infrared versus color sen-
sors) or, for example, the images of figure 1, the
appearance-based descriptors such as SIFT (Lowe,
1999) or Hue histograms (van de Weijer and Schmid,
2006) completely fail whereas the self-similarities
provide accurate information (Kim et al., 2015). We
can note that CNN features (Krizhevsky et al., 2012)
do not cope with this problem because they are based
on learned convolutional filters that can not adapt
themselves alone to a new modality. Consequently,
these deep-features have been recently mixed with
self-similarities in order to improve the results (Wang
et al., 2015).
The idea of self-similarity consists in describing
the content of the images by informing how similar
are some local regions from each other (Shechtman
and Irani, 2007; Chatfield et al., 2009; Deselaers and
Ferrari, 2010). By this way, when two red and tex-
tured regions are similar in an image, their contribu-
tion to the final descriptor will be the same as this
of two green and homogeneous regions. This repre-
sentation is also invariant to any illumination condi-
tion variations, to changes in the colors of the objects
(a red bike will have the same description as a blue
one) and to modifications of the textures. For exam-
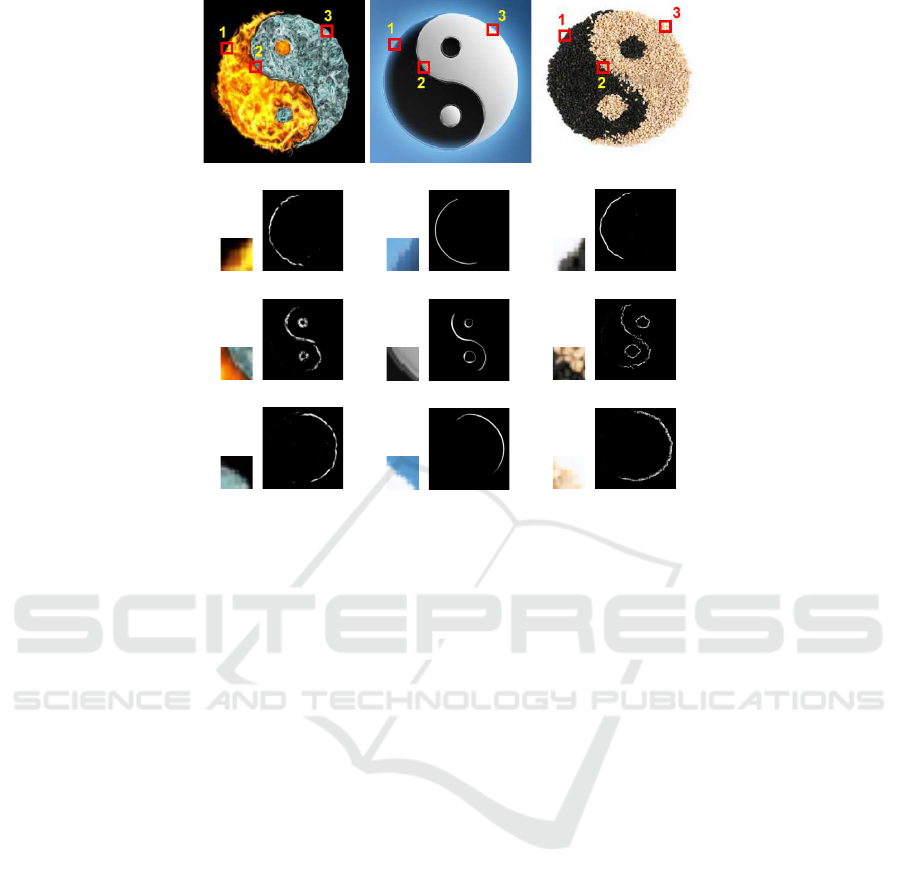
ple, the figures {1(c), 1(e), 1(g)}, {1(j), 1(l), 1(n)}
and {1(q), 1(s), 1(u)} show some self-similarities
we have evaluated from the 3 images 1(a), 1(h) and
1(o) respectively. For this aim, we have extracted
3 patches {1(b), 1(d), 1(f)}, {1(i), 1(k), 1(m)} and
{1(p), 1(r), 1(t)} at corresponding positions in each
image 1(a), 1(h) and 1(o) repectively and we have
evaluated the similarities between each of this patch
with all the patches in the corresponding images. We
can see that the similarities remain stable across varia-
tions in colors and textures and consequently their lo-
cal (Shechtman and Irani, 2007; Chatfield et al., 2009)
or global (Deselaers and Ferrari, 2010) spatial distri-
bution can be used to efficiently describe the contents
of the images.
344
Song X., Muselet D. and Tremeau A.
Color-based and Rotation Invariant Self-similarities.
DOI: 10.5220/0006107503440351
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 344-351
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
(a)
(b) (c)
(d) (e)
(f) (g)
(h)
(i) (j)
(k) (l)
(m) (n)
(o)
(p) (q)
(r) (s)
(t) (u)
Figure 1: The images 1(a), 1(h) and 1(o) represent the same symbol but do not share any shape or color information at the
pixel level. The local patches numbered 1 (1(b), 1(i), 1(p)), 2 (1(d), 1(k), 1(r)) and 3 (1(f), 1(m) and 1(t)) are extracted
from similar relative positions in these 3 images. The figures 1(c), 1(j), 1(q), 1(e), 1(l), 1(s), 1(g), 1(n) and 1(u) represent the
similarities (evaluated with our method) between these respective patches and the image from where they have been extracted.
They represent self-similarities.
In this context, the classical approaches propose
to extract the similarity between two local patches
by evaluating their correlation (Shechtman and Irani,
2007; Chatfield et al., 2009). The drawback of the
correlation is that it is based on a pixelwise multipli-
cation and hence is not invariant to rotation. Indeed,
the similarity between two patches can be very low if
the first one of these patches is a rotated version of
the second one. The image 2(c) represents the simi-
larities between the patch 2(b) extracted from the im-
age 2(a) and all the patches in the image 2(a) with the
correlation-based method. We can see that only a part
of the bike frame is detected by this way because the
orientations of the other parts of the frame are differ-
ent.
In this paper, we propose to associate each patch
in an image with one particular spatio-colorimetric
descriptor and to evaluate the similarity between two
patches by comparing their descriptors. The proposed
descriptor represent both the colors of the pixels in the
patch and their relative spatial positions while being
invariant to rotation. In order to design this descrip-
tor we exploit the work from Song et al. (Song et al.,
2009). The similarities evaluated by this way are dis-
played in the image 2(d). In this case, we can see that
almost the whole frame of the bike can be detected
whatever the orientation of each part. Furthermore,
we will show that our descriptor-based self-similarity
evaluation provides us the information of the angle
difference between the orientations of the two com-
pared patches and that this information can be intro-
duced in the representation of the spatial distribution
of the self-similarities in an image.
In the second part of this paper, we present how
the classical approaches extract the self-similarities
from the images and how they represent their spa-
tial distribution. Then, in the third part, we intro-
duce our new local spatio-colorimetric descriptor on
which is based our self-similarity evaluation. We pro-
pose to represent the spatial distribution of the self-
similarities by a 3D structure presented in the fourth
part. The fifth part is devoted to the experimental re-
sults obtained in object classification task and we con-
clude in the sixth part.
2 RELATED WORKS
Shechtman et al. have designed a local descriptor
based on self-similarity (Shechtman and Irani, 2007;
Kim et al., 2015). Considering one patch, the idea
consists in measuring the similarity between it and its
Color-based and Rotation Invariant Self-similarities
345

(a) (b)
(c) (d)
Figure 2: The images 2(c) and 2(d) represent the similarities between the patch 2(b) extracted from the image 2(a) and all the
patches in the image 2(a) with the correlation-based method (2(c)) and with our descriptor-based method (2(d)).
surrounding patches. To determine the similarity be-
tween two patches, they propose first to evaluate the
pixelwise sum of square differences (SSD) and second
they transform this distance to a similarity measure
SM = exp(−
SSD
σ
) where σ is related to the variance
of all the SSD locally evaluated. Then, the neigh-
borhood of the considered patch is discretized on a
log-polar grid and the maximal value of SM is stored
within each bin grid. Chatfield et al. have also shown
that the use of this local description provide better re-
sults than appearance-based descriptors such as SIFT
for matching non-rigid shape classes (Chatfield et al.,
2009).
Deselaers et al. argue that in the context of ob-
ject classification and detection, the self-similarities
should be evaluated globally rather than locally (De-
selaers and Ferrari, 2010). Thus, they proposeto com-
pare each patch with all the patches in the image.
Since this approach is highly time consuming, they
propose an alternative to the classical pixelwise simi-
larity evaluation that is based on the bag-of-words ap-
proach. Indeed, they associate each patch with a vec-
tor which can be its discrete cosine transform (DCT)
or the patch itself (reshaped into a vector) and apply
a k-means clustering in this vector space in order to
get the most frequent vectors. Then, giving a patch,
they evaluate its distance with all the cluster represen-
tatives and associate it with the nearest neighbor. By
this way the similarity measure between two patches
is a binary value, 1 if the patches are associated with
the same cluster representatives and 0 if not. In order
to design their global descriptor, called SSH for Self-
Similarity Hypercube, Deselaers et al. first propose
to project a regular D
1
xD
2
grid onto the image. Then,
they evaluate the similarity between all the patches
in one grid cell GC
i
and all the patches in the im-
age. This returns a correlation surface whose size is
the same as the image size. Then, they sub-sample
this correlation surface to the size D
1
xD
2
and put it in
the grid cell GC
i
. By doing that for all the grid cells
GC
i
, i = 1,...,D
1
xD
2
, they obtain their 4D SSH of
size D
1
xD
2
xD
1
xD
2
which represent the global repar-
tition of the self-similarities in the image.
In these main works, the self-similarities are eval-
uated either by using pixelwise correlation between
patches or by comparing the indexes of the associ-
ated cluster representatives of the two patches. In the
first case, the extraction of the self-similarities can be
highly time consuming and in the second case, the
similarity between two patches is a binary value, 0
or 1. Furthermore, the results provided by the sec-
ond approach are highly dependent on the quality of
the clustering step. Consequently, we propose another
approach that speed up the self-similarity evaluation
while giving a real value as similarity measure be-
tween two patches. Therefore, we propose to evaluate
a color descriptor of each patch and then to evaluate
a similarity measure between these descriptors. Since
these descriptorsare not dependent on the orientations
of the patches, our self similarities are rotation invari-
ant. This is illustrated in Fig.2, where we can see
that the classical correlation-based approaches (image
2(c)) can not detect all the self-similarities in the im-
age whereas the self-similarities detected by our ap-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
346

proach in image 2(d) clearly underline the discrimi-
native power of the proposed color descriptor as well
as its rotation invariance. Our local descriptor is in-
troduced in the next section.
3 ROTATION INVARIANT
DESCRIPTOR
In this section, we present our spatio-colorimetric de-
scriptor used to evaluate the self-similarities. There-
fore, we propose to exploit the paper from Song et
al. (Song et al., 2009). The main idea of this paper,
presented in the next paragraph, consists in applying
an affine transform from image space to color space in
order to design a local descriptor. Nevertheless, this
descriptor requires a rotation invariant local region
detection in order to be invariant to rotation. In the
context of self similarity extraction, the image (or a
part of the image) is dense sampled in order to extract
patches at regular positions and to evaluate the simi-
larity between each pair of patches. If the descriptor
of each patch is not stable across rotation in the image,
the extracted self-similarities will not be invariant to
rotation. Consequently, in the second paragraph we
propose to extend the approach of Song et al. in order
to design a new rotation invariant descriptor.
3.1 The Spatio-colorimetric Descriptor
from Song et al. (Song et al., 2009)
Song et al. have proposed a way to extract a de-
scriptor from each detected local region (patch) in
an image. The main idea consists in applying an
affine transform to the pixels of the considered patch,
from the image space to a color space. Thus, con-
sidering a pixel P
i
characterized by the 3D-position
{x
Co
i
,y
Co
i
,z
Co
i
} = {c
R
i
,c
G
i
,c
B
i
} in the color space Co
and the 2D-position {x
Pa
i
,y
Pa
i
} in the patch-relative
space Pa so that the center of the patch has {0, 0} for
coordinates. Song et al. propose to define an affine
transform from the patch space to the color space as:
m
1
m
2
t
x
m
3
m
4
t
y
m
5
m
6
t
z
x
Pa
i
y
Pa
i
1
=
x
Co
i
y
Co
i
z
Co
i
(1)
where t
x
, t
y
and t
z
are the translation parameters and
the m
i
are the rotation, scale and stretch parameters.
This equation can be re-written as follows:
[Af] × [Pa] = [Co].
It is based on the coordinates of one pixel but all
the pixels of the patch can be accounted by adding
columns in the matrices [Pa] and [Co]. Since there
exists no such affine transform from the image space
to a color space, Song et al. propose to estimate the
best one as the least-squares solution:
Af = Co[Pa
T
Pa]
−1
Pa
T
. (2)
Once the transform parameters have been de-
termined, they apply the transform to the 4 pix-
els corresponding to the corners of the patch
and whose coordinates in the patch space are
{−sx/2, −sy/2}, {sx/2,−sy/ 2}, {−sx/2,sy/2} and
{sx/2,sy/2}, where sx and sy are the width and height
of the patch, respectively. The positions of these cor-
ners in the color space after applying the affine trans-
form constitute the descriptor:
Descriptor = A f ×
−sx/2 sx/2 −sx/2 sx/2
−sy/2 −sy/2 sy/2 sy/2
1 1 1 1
.
(3)
The use of the least-squares solution method pro-
vides the discriminating power of the descriptor. In-
deed, the resulted destination position of a pixel de-
pends not only on its color but also on the colors and
the relative positions of the other pixels of the local
region. Thus, considering two patches characterized
by the same colors but by different spatial color ar-
rangements, the resulted descriptors will be different.
This characteristic is very interesting in the context of
object recognition.
Nevertheless, in the context of self-similarity eval-
uation, the patches are dense sampled without any in-
formation about their orientation. So, the x and y axis
of the patches are all oriented along the horizontal and
vertical directions respectively. In this case, this de-
scriptor is not stable across rotation in the image space
and we show in the next paragraph the way to reach
this invariance.
3.2 The Proposed Rotation Invariant
Descriptor
We consider two patches Pa
1
and Pa
2
so that the sec-
ond one is a rotated version of the first one:
x
Pa
2
i
y
Pa
2
i
= Rot ×
x
Pa
1
i
y
Pa
1
i
. (4)
By applying the approach of Song et al. on these
two patches, we can determine one affine transform
for the first patch Af
1
= Co[Pa
T
1
Pa
1
]
−1
Pa
T
1
and one
for the second patch Af
2
= Co[Pa
T
2
Pa
2
]
−1
Pa
T
2
. From
equation (4), we have Pa
2
= Rot.Pa
1
and then:
Color-based and Rotation Invariant Self-similarities
347

Af
2
= Co[Pa
T
2
Pa
2
]
−1
Pa
T
2
Af
2
= Co[(Rot.Pa
1
)
T
(Rot.Pa
1
)]
−1
(Rot.Pa
1
)
T
Af
2
= Co[Pa
T
1
.Rot
T
.Rot.Pa
1
]
−1
Pa
T
1
.Rot
T
Af
2
= Co[Pa
T
1
.Pa
1
]
−1
Pa
T
1
.Rot
T
Af
2
= Af
1
.Rot
T
,
(5)
because for any rotation matrix Rot, Rot
T
.Rot =
Identity.
By using these two transforms Af
1
and Af
2
in the
equation (3), we can see that the descriptors of the two
patches Pa
1
and Pa
2
are different. So these descrip-
tors can not be used directly in order to find rotation
invariant self similarities in images.
However, the equation (5) shows that the trans-
forms obtained for two patches, the second patch be-
ing a rotated version of the first, are related to each
other by the rotation applied in the patch space. Our
intuition is to use this transform itself as a descriptor
after removing the rotation from it. Since this rota-
tion is applied in the patch space, it is a 2D rotation
and can be represented by a 2x2 matrix Rot
2x2
. Thus,
we propose to rewrite the transform A f
k
of the patch
Pa
k
, k = 1 or 2, as follows:
Af
k
x
Pa
k
i
y
Pa
k
i
1
=
mk
1
mk
2
tk
x
mk
3
mk
4
tk
y
mk
5
mk
6
tk
z
x
Pa
k
i
y
Pa
k
i
1
=
mk
1
mk
2
mk
3
mk
4
mk
5
mk
6
"
x
Pa
k
i
y
Pa
k
i
#
+
tk
x
tk
y
tk
z
= Mk
3x2
"
x
Pa
k
i
y
Pa
k
i
#
+ Tk
3x1
.
(6)
Since each transform Af
k
is evaluated in the
corresponding patch Pa
k
relative coordinates system
(where the center of the patch has {0,0} for co-
ordinates), the translation parameters in T1
3x1
and
T2
3x1
are the same and the only variation between
Af
1
and Af
2
holds in the Mk
3x2
matrices. Further-
more, from equation (5), we can deduce that M2
3x2
=
M1
3x2
Rot
T
2x2
. Our aim is to remove the rotation term
from the Mk
3x2
matrices so that they become iden-
tical. Therefore, we propose to use the QR factor-
ization tool. This factorization decomposes a matrix
Mk
3x2
into a product of a rotation matrix Qk
3x3
and
a triangular upper right matrix Rk
3x2
so that Mk
3x2
=
Qk
3x3
Rk
3x2
. Since the rotation matrix is applied in
the 2D patch space, it is a 2D rotation and so can
be represented by a 2x2 matrix. So we rather pro-
pose to apply the QR factorization on the transpose
of the Mk
3x2
matrix. By this way, we will obtain
Mk
T
3x2
= Qk
2x2
Rk
2x3
and hence Mk
3x2
= Rk
T
2x3
Qk
T
2x2
where the matrix Qk
2x2
contains the rotation part of
the matrix Mk
3x2
. Since the matrix Rk
2x3
is not sensi-
tive to rotation variation we have R1
2x3
= R2
2x3
.
To summarize, considering two patches, we pro-
pose to:
• evaluate the affine transforms (from image space
to color space) Af
1
and Af
2
of the patches by us-
ing the Song et al. method (Song et al., 2009)
(equation (2)),
• decompose each transform Af
k
into two trans-
forms Mk
3x2
(rotation, scale, stretch) and Tk
3x1
(translation) (equation (6)),
• apply the QR factorization on the transposes of
the Mk
3x2
matrices giving two matrices Rk
2x3
and
Qk
2x2
.
Previously, we have shown that if the second patch
Pa
2
is a rotated version of the first one Pa
1
, we have
T1
3x1
= T2
3x1
and R1
2x3
= R2
2x3
. Consequently, we
propose to take these two matrices Tk
3x1
and Rk
2x3
as the rotation invariant descriptor for the patch Pa
k
.
Since the matrix Rk
2x3
is a triangular upper right ma-
trix, we consider only the 5 non-zero values among
its 6 values. Thus, the descriptor we propose in this
paper is constituted by only 3+ 5 = 8 values.
Thus, the advantages of our descriptor is three-
fold. First since it represents both the colors and
their relative spatial distribution in the patch space,
it is highly discriminative and so can determine if two
patches are similar or not. Second, the time process-
ing required to evaluate the similarity between two
patches is very low since each descriptor is consti-
tuted by only 8 values. Third, this descriptor is fully
invariant to rotation in the patch space. The discrim-
inative power and the rotation invariance property of
our descriptor can be checked in the figures 1 and 2.
4 REPRESENTATION OF THE
SPATIAL DISTRIBUTION OF
THE ROTATION INVARIANT
SELF-SIMILARITIES
We consider one patch Pa
0
in an image and we
want to represent the spatial distribution of the self-
similarities around this particular patch. If in its sur-
rounding, one other patch Pa
1
has similar colors spa-
tially arranged in a similar way as Pa
0
, the similarity
between their descriptors will be high, even if there
exists a rotation between them in the image space.
In this case, 3 values can be used to represent the
relative position and orientation of these patches: 2
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
348

values ∆x and ∆y represent the translation along the
x and the y axis respectively, and 1 value ∆θ repre-
sents the rotation angle between these two patches.
The translation values are easily obtained by evaluat-
ing the differences between the x and y coordinates of
the centers of the patches. The ∆θ can be obtained
from their respective Qk
2x2
matrix introduced in the
previous section. Indeed, these matrices represent the
rotation in the image space applied to each patch so
that they match the same position in the color space.
Consequently if the patch Pa
0
is rotated by an angle
θ
0
and the patch Pa
1
by an angle θ
1
in order to match
the same position, the ∆θ is just the difference be-
tween these two angles. Consequently, we propose to
create a 3D structure around the patch Pa
0
whose axis
are ∆x, ∆y and ∆θ and to put the value of the similar-
ity between Pa
0
and Pa
1
in the cell whose coordinates
are {x
1
− x
0
,y
1
− y
0
,θ
1
− θ
0
}, where x
k
and y
k
are the
position in the image space of the center of the patch
Pa
k
, k = 0 or 1. Likewise, we can do the same for
all the patches Pa
i
, i > 0, around Pa
0
in order to rep-
resent the spatial distribution of the self-similarities
around Pa
0
. For this, the neighborhood of the patch
Pa
0
is discretized into a grid of size 5x5 and the angle
axis is discretized into 4 values. The maximal sim-
ilarity is stored within one cell if several similarities
are falling in the same position. This representation is
similar to this proposed by Shechtman et al. (Shecht-
man and Irani, 2007) but since we can find similarities
between patches with different orientations, we have
added a third dimension for the angle. The dimension
of the feature of Shechtman et al. was 4 radial inter-
vals x 20 angles = 80 while our is 100 (5 ∆x intervals
x 5 ∆y intervals x 4 angles).
5 EXPERIMENTS
5.1 Experimental Approach
The rotation invariance of our self-similarity having
been theoretically demonstrated, we propose to assess
the discriminative power of the final descriptor and
to compare it with the other self-similarities that are
classically used in many applications, as mentioned
in the introduction. For this purpose, we consider
the context of object classification by using the PAS-
CAL VOC 2007 dataset (Everingham et al., ). This
dataset contains 9963 images representing 20 classes.
The aim of this experiment is not to get state-of-the-
art classification score on the considered dataset, but
rather to fairly compare the discriminative powers of
the different self-similarity descriptors. In order to
test our self-similarity, we propose to use the Bag-
of-words approach which is based on the following
successive steps:
• keypoint detection (dense sampling is used for all
tested methods),
• local descriptor extraction around each keypoint
(we use the 3D structures presented in the previ-
ous section for our method),
• clustering in the descriptor space, the cluster rep-
resentatives are called visual words (k-means is
used with 400 words for all tested methods),
• in each image, each local descriptor is associated
with the nearest visual word,
• each image is characterized by the histogram of
visual word,
• learning on the train images and classification of
the test images (linear SVM is used for all tested
methods).
Furthermore, we propose to compare our results
with the local self-similarity descriptor (Shechtman
and Irani, 2007) and with the global self-similarity
descriptor (Deselaers and Ferrari, 2010). For both,
we use the codes provided by the authors. For the
global self-similarity descriptor, we have constructed
the SSH (with D
1
= D
2
= 10) from the image and
consider each grid cell as a feature. So, this feature is
also of dimension 100. For all the approaches, we re-
duce the dimension of the features to 32 by applying
PCA.
5.2 Results
The results are shownin figure 3. In this figure, BOCS
stands for Bag Of Correlation Surfaces (Deselaers and
Ferrari, 2010), BOLSS stands for Bag Of Local Self
Similarities and BORISS is our proposed approach
and means Bag Of Rotation Invariant Self Similari-
ties.
In this figure, we can see that our approach outper-
forms the two other ones for most of the 20 classes.
Furthermore, the Mean Average Precision (MAP)
provided by our BORISS is 25% while it is around
18% for the two other approaches. This experiment
shows that the self similarities are more efficient to
characterize the content of an image if they are in-
variant to the rotation. Of course, these results are
not competitive with the ones provided by SIFT or
CNN features, but the aim of these experiments was to
showthat adding color and rotation invarianceinto the
self-similarity descriptors improves the discriminat-
ing power of the final features. These results clearly
show that our self-similarity representation is a good
candidate to be used as complementary information
with the appearance-based features.
Color-based and Rotation Invariant Self-similarities
349
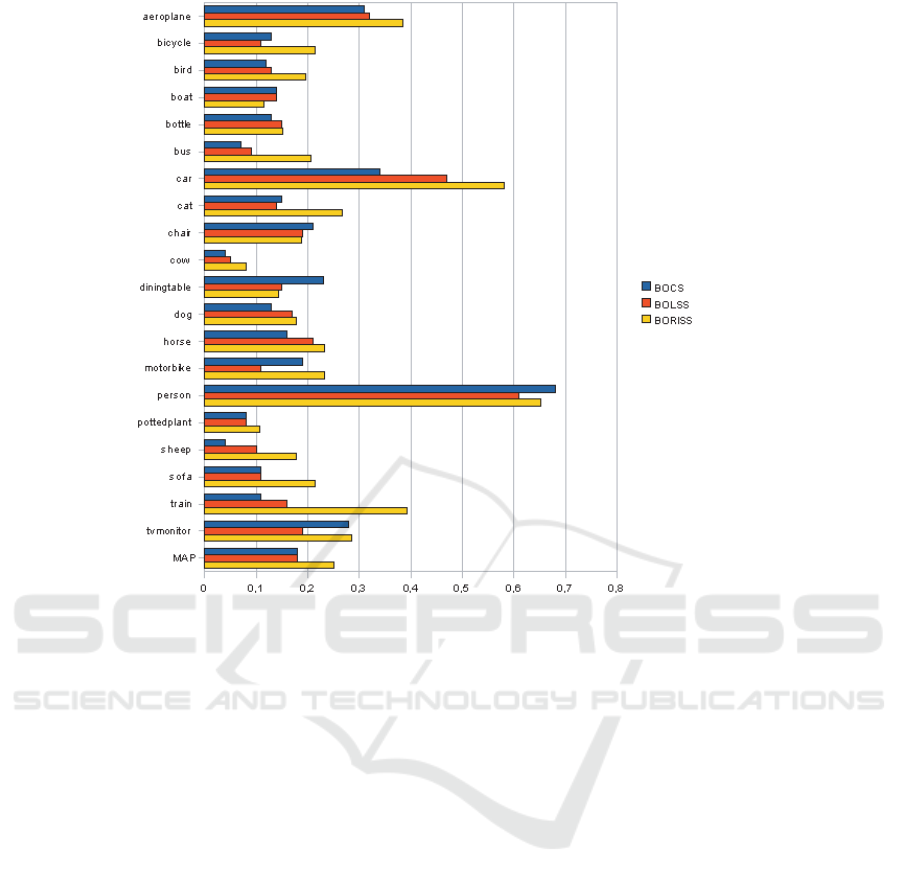
(Deselaers)
(Shechtman)
(This paper)
Figure 3: Mean average precision obtained by the three tested approaches on the VOC 2007 database.
6 CONCLUSION
In this paper, we have presented a new method to rep-
resent the spatial distribution of the self-similarities in
an image. First, we have proposed to extract rotation
invariant self-similarities. This extraction is based
on a comparison of new spatio-colorimetric descrip-
tors. We have shown that these descriptors extract dis-
criminative information from local regions while be-
ing very compact and invariant to rotation. Then, we
have proposed a 3D structure to represent the spatial
distribution of these self-similarities. This structure
informs about the translation and rotation there exist
between two similar local regions. The experimental
results provided by this method outperform those of
the classical self-similarity based approaches. In this
work, we found a way to represent translation and ro-
tation that occur between self-similar regions and as
future works we are trying to add the other possible
transformation such as scale variation or stretch. Fi-
nally, the discriminative color descriptors introduced
in this paper could be used as a color texture descrip-
tor since it is representing both the colors and their
spatial distributions within the local neighborhood.
REFERENCES
Chatfield, K., Philbin, J., and Zisserman, A. (2009). Effi-
cient retrieval of deformable shape classes using local
self-similarities. In NORDIA workshop in conjunction
with ICCV.
Chih-Yuan, Y., Jia-Bin, H., and Ming-Hsuan, Y. (2011).
Exploiting self-similarities for single frame super-
resolution. In Proceedings of the 10th Asian Con-
ference on Computer Vision - Volume Part III, pages
497–510, Berlin, Heidelberg. Springer-Verlag.
Deselaers, T. and Ferrari, V. (2010). Global and efficient
self-similarity for object classification and detection.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), San Fran-
cisco, DC, USA. IEEE Computer Society.
Everingham, M., Van Gool, L., Williams, C.
K. I., Winn, J., and Zisserman, A. The
PASCAL Visual Object Classes Challenge
2007 (VOC2007) Results. http://www.pascal-
network.org/challenges/VOC/voc2007/workshop/
index.html.
Glasner, D., Bagon, S., and Irani, M. (2009). Super-
resolution from a single image. In ICCV.
Kim, S., Min, D., Ham, B., Ryu, S., Do, M. N., and Sohn,
K. (2015). Dasc: Dense adaptive self-correlation de-
scriptor for multi-modal and multi-spectral correspon-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
350

dence. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 2103–2112.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Pereira, F., Burges, C., Bottou, L., and
Weinberger, K., editors, Advances in Neural Informa-
tion Processing Systems 25, pages 1097–1105. Curran
Associates, Inc.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the IEEE Inter-
national Conference on Computer Vision (ICCV), vol-
ume 2, pages 1150–1157 vol.2. IEEE Computer Soci-
ety.
Shechtman, E. and Irani, M. (2007). Matching local self-
similarities across images and videos. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Song, X., Muselet, D., and Tremeau, A. (2009). Local
color descriptor for object recognition across illumi-
nation changes. In ACIVS09, pages 598–605, Bor-
deaux (France).
van de Weijer, J. and Schmid, C. (2006). Coloring local fea-
ture extraction. In Proceedings of the European Con-
ference on Computer Vision (ECCV), volume 3952 of
Lecture Notes in Computer Science, pages 334–348.
Wang, J., Lu, K., Pan, D., He, N., and kun Bao, B. (2014).
Robust object removal with an exemplar-based image
inpainting approach. Neurocomputing, 123:150 – 155.
Wang, Z., Yang, Y., Wang, Z., Chang, S., Han, W., Yang,
J., and Huang, T. S. (2015). Self-tuned deep super
resolution. In IEEE Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW).
Zontak, M. and Irani, M. (2011). Internal statistics of a sin-
gle natural image. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Color-based and Rotation Invariant Self-similarities
351
