
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm
Forrest Stonedahl
1
, Susa H. Stonedahl
2
, Nelly Cheboi
1
, Danya Tazyeen
1
and David Devore
1
1
Math and Computer Science Department, Augustana College, Rock Island, Illinois, U.S.A.
2
Engineering and Physical Science Department, St. Ambrose University, Davenport, Iowa, U.S.A.
Keywords:
Novelty Search, Neuroevolution, Multi-agent Robotics, Exploration.
Abstract:
This paper compares the use of novelty search and objective-based evolution to discover motion controllers
for an exploration task wherein mobile robots search for immobile targets inside a bounded polygonal re-
gion and stop to mark target locations. We evolved the robots’ neural-network controllers in a custom 2-D
simulator, selected the best performing neurocontrollers from both novelty search and objective-based search,
and compared performance relative to an unevolved (baseline) controller and a simple human-designed con-
troller. The controllers were also transferred onto physical robots, and the real-world tests provided good
empirical agreement with simulation results, showing that both novelty search and objective-based search pro-
duced controllers that were comparable or superior to the human-designed controller, and that objective-based
search slightly outperformed novelty search. The best controllers had surprisingly low genotypic complexity,
suggesting that this task may lack the type of deceptive fitness landscape that has previously favored novelty
search over objective-based search.
1 INTRODUCTION
Within evolutionary robotics, there has been growing
enthusiasm surrounding the concept of novelty search
(NS) (Lehman and Stanley, 2011), wherein the evolu-
tionary algorithm focuses solely on generating novel
behaviors, without regard to objective measures that
quantify robot performance on the desired task. This
re-integration of the idea of open-ended evolution into
solving performance-based machine learning tasks is
intriguing, and promising results have been published
for a variety of domains, including 2-D maze naviga-
tion and bipedal walking (Lehman and Stanley, 2011),
tunable deceptive T-mazes (Risi et al., 2009), and sim-
ulated robot swarm aggregation and resource sharing
tasks (Gomes et al., 2013). Extending this general
line of research, our paper documents one of the first
uses of NS for evolving neurocontrollers that are em-
ployed in a physical swarm robotics exploration ex-
periment. In the remainder of the paper, we will de-
fine our swarm robotics task, describe the software
simulator, explain the evolutionary search for neuro-
controllers, and discuss the results of simulated and
physical robot experiments with those controllers.
2 TASK SPECIFICATION/
BACKGROUND
While some have defined swarm robotics as involving
the coordination of large numbers of agents, we as-
cribe to the definition proposed in a recent review pa-
per (Brambilla et al., 2013) wherein the main charac-
teristics of swarm robotics system are that robots are
autonomous, situated in a changeable environment,
possess only local sensing/communication, lack cen-
tralized control and/or global knowledge, and coop-
erate on a given task. Thus, although we only em-
ploy eight robots, we prefer to frame this task within
the genre of swarm robotics because of the manner in
which the robots are allowed to interact.
2.1 Multi-agent Search Task
Disaster recovery has been identified as an impor-
tant real-world application where collaborative robot
teams could provide a great benefit to society (Davids,
2002), and our experimental task is based on a loose
analogy to the following search/rescue scenario. We
are concerned with the task of collaborative explo-
ration of a region for which the robots will not pos-
sess a map or any a priori knowledge about the shape
of the region. For economic scalability, the individ-
382
Stonedahl F., Stonedahl S., Cheboi N., Tazyeen D. and Devore D.
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm.
DOI: 10.5220/0006118303820389
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 382-389
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ual robots will each be quite simple and endowed
with only limited capacities for sensing, and no form
of direct inter-robot communication. The robots
will possess basic locomotion (change heading/move
forward), distance sensors that can detect obstacles
nearby (which could be walls or other robots), and
some form of specialized local sensors that can detect
“targets” (possibly disaster victims, chemical hazards,
etc.), but only at very close range. Once a robot
encounters a target, it will remain at that location
(e.g. providing aid and/or communication services
to the victim, providing a beacon for rescue workers
to track, etc.) The robot swarm’s goal is to spread
quickly throughout the disaster domain and collec-
tively locate as many targets as possible.
We abstract this specific real-world task into the
following simplified version of the problem, which
we will refer to as the Multi-Agent Multi-Target
Search and Stay (MAMTSS) problem. Given a
bounded (flat) 2-D polygonal region, N targets are
placed within the region, and N robot agents are de-
ployed along one boundary of the region. The robots
are launched simultaneously, and after a fixed time
limit, the success of the robot team is measured by
the fraction of the N targets that were located during
that time period. In the present work, we disallow
any explicit communication between robots. How-
ever, a robot’s distance or bump sensor may detect
other robots, even though the sensor cannot distin-
guish whether it has reacted to a wall or another robot.
Thus, robots may still influence other robots’ behav-
ior without communicating directly, similar to a flock
of “boids” (Reynolds, 1987).
2.2 Related Work
The MAMTSS problem is most closely related to the
team coverage task, where the robots’ collective goal
is that every location has had a robot pass over it, as in
the examples of lawn mowing or vacuuming (Choset,
2001; Rekleitis et al., 2004). Since the targets in
MAMTSS are placed randomly in the region, our task
could almost be described as a stochastic sampling
method for estimating “coverage”; however, it differs
slightly since robots that reach a target remain immo-
bile at that spot thereafter, rather than continuing to
explore. Some approaches to the coverage task use a
priori global map knowledge to guarantee complete
coverage (Rekleitis et al., 2004), while others em-
ploy stigmergy, such as using artificial pheremones
to mark cells in the environment as explored (Wagner
et al., 2008). It has also been shown that with enough
robots, even local obstacle avoidance behavior can
achieve decent coverage of the space (Ichikawa and
Figure 1: Physical robot design. Two wheel motors provide
differential steering, and a third motor swivels the distance
sensor to take measurements at 30
◦
increments.
Hara, 1999), which is relevant because our MAMTSS
task relies on local sensing/geometry rather than on
global knowledge, direct communication, or even in-
direct communication via stigmergy. In contrast to
their specific human-coded navigation strategy, we
are evolving robot motion controllers. Another related
task is robot dispersion (McLurkin and Smith, 2007)
although there the robots’ goal is to spread out evenly
throughout the space, rather than to locate as many
targets as possible.
2.3 Physical Setup and Robot
Specifications
We designed and built 8 identical robots using the
LEGO
TM
Mindstorms EV3 robotics kit, as pictured in
Figure 1. While these consumer-grade robots would
be inadequate for rugged real-world search and res-
cue missions, they are well-suited for our simpli-
fied task. The ease of modification and configura-
tion makes them a versatile research tool, and Mind-
storms robots have been successfully applied in pre-
vious evolutionary robotics research studies (Lund,
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm
383
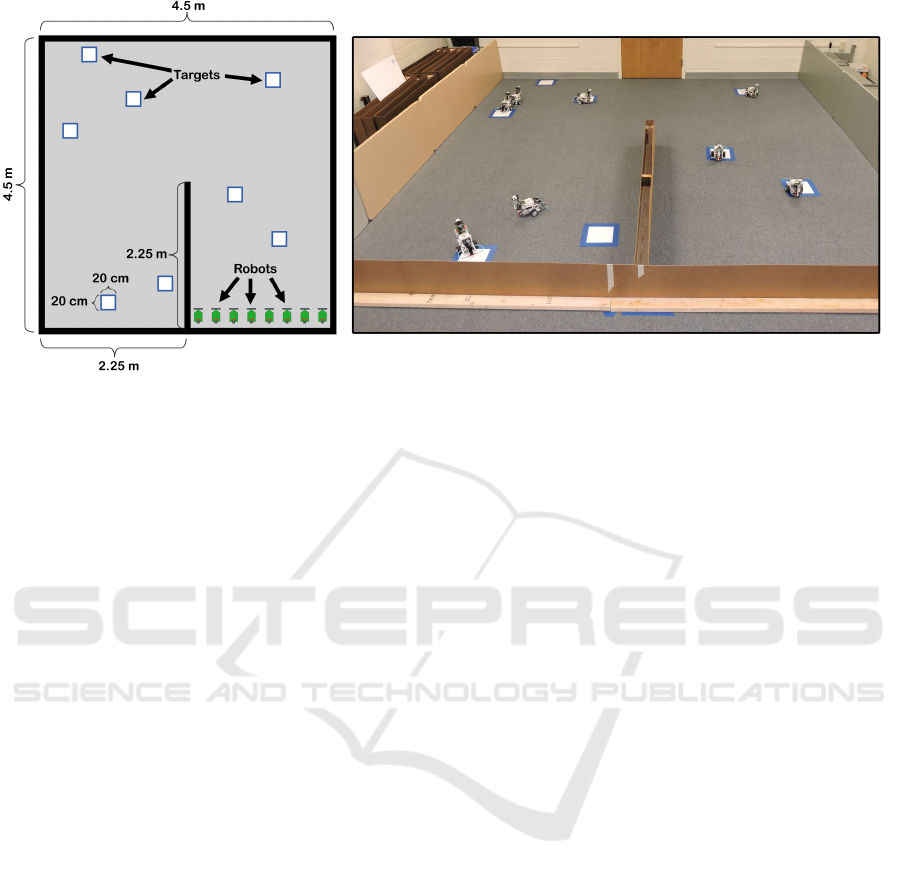
Figure 2: LEFT: Initial top-down layout for the MAMTSS task. The interior wall was 10 cm thick and all walls were at least
30 cm tall. RIGHT: The physical MAMTSS environment, at the end of an 8-minute trial where the team located 6 of 8 targets.
2003; Parker and Georgescu, 2005). The EV3 model
features a 300 Mhz ARM9 processor, 64MB of RAM,
runs embedded Linux, and is programmable in Java
using the open-source LeJOS framework. Each robot
independently repeats three phases: sensing, turning,
and movement. During the sensing phase it takes dis-
tance measurements at 12 regularly-spaced (30
◦
) an-
gles. During the turning phase it chooses an angle to
rotate based on the 12 distance measurements. Dur-
ing the movement phase it moves straight forward 40
cm. If it runs into an obstacle (other robot/wall) that
triggers the “bump sensor” on the front of the robot, it
moves backward 10 cm, and then starts a new sensing
phase. If the robot’s color sensor detects a white tar-
get beneath it at any point, the robot will cease move-
ment and stay at that location for the remainder of the
trial. For our physical implementation of the 8-agent
MAMTSS task, we designed a simple orthogonal U-
shaped environment, as shown in Figure 2. For each
trial, the robots were given 8 minutes to explore the
region and locate as many goals as possible.
3 SIMULATION AND
NEURO-EVOLUTION
3.1 Neural Network Design
We evolved simple feed-forward artificial neural net-
works (ANNs) with 12 input neurons (corresponding
to the 12 equiangular measurements from the distance
sensor), one output neuron (which controls the angle
for each robot’s turning phase), and a variable num-
ber of hidden-layer neurons (added during neuroevo-
lution). The robot’s ultra-sonic distance sensor has a
maximum range of 2.5 meters, and will report a value
of “Infinity” for “out of range”, which we translated
into 10 m. The distance measurements in meters were
normalized and fed into the neural network. Since a
sigmoidal activation function would bias the output
angle toward sharp turns, the output neurons were as-
signed a linear activation function. However, hidden
layer neurons used a sigmoidal activation function to
permit the construction of nonlinear functions. The
final neural output was adjusted/scaled to always be
between −180 and 180 degrees.
3.2 Simulation Software
The time required for running evolutionary algo-
rithms on the physical robots themselves was pro-
hibitive, so we used the NetLogo platform (Wilensky,
1999) to develop a custom 2-D mobile robot simula-
tor for this task. (The diagram shown in Figure 2 is
based on a screenshot from this simulator.) Based on
extensive calibration measurements with the physical
robots, we incorporated realistic levels of Gaussian
noise into the sensor data and actuator error within
the simulator.
3.3 Search Algorithm Experiments
We connected the simulator to the AHNI framework
(Coleman, 2012) for neuro-evolution, and applied the
well-established NEAT search algorithm (Stanley and
Miikkulainen, 2002) for both objective-based search
and novelty search, to evolve neurocontrollers for the
robots. The search parameters, given in Table 1,
were chosen from reasonable ranges based on previ-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
384
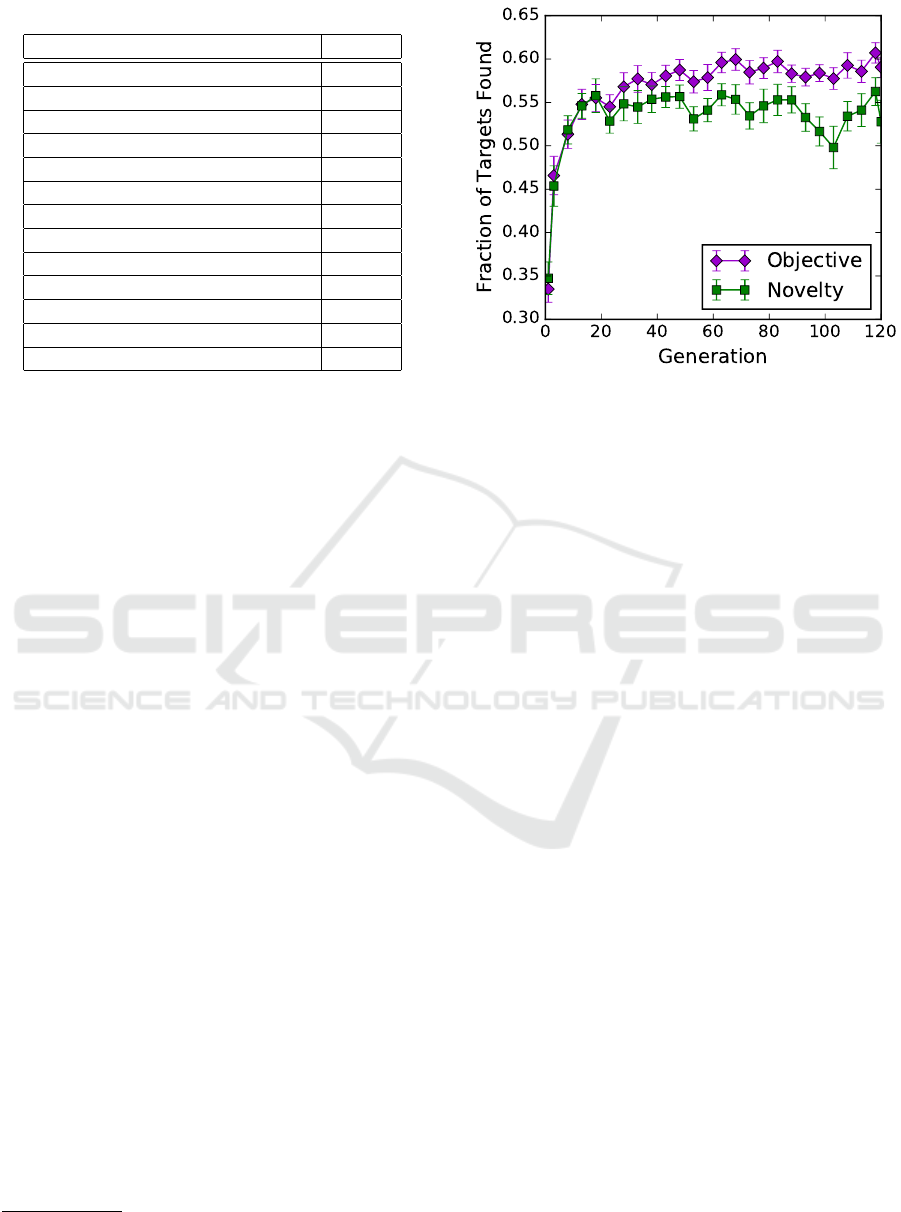
Table 1: Search algorithm parameters.
Parameter Value
Population size 100
Simulation trials per fitness eval. 10
Add neuron mutation rate .03
Add connection mutation rate .30
Remove connection mutation rate .01
Weight mutation rate (& stdev) .80 (1)
Min/max connection weight range [−8, 8]
Number of generations 120
Crossover rate .75
Survival rate .40
Elitism proportion .10
Novelty k (nearest neighbors) 15
Novelty threshold .05
ous work (Stanley and Miikkulainen, 2002; Lehman
and Stanley, 2011). Apart from the use of either
objective or novelty to guide the evolution process,
all other aspects of the two search experiments were
identical. For each generation, 10 new random seeds
were used to determine the random positions of the
8 targets within the environment, and all individuals
within that generation performed trials on those 10
course layouts. An individual’s “performance” score
was calculated as the average (across the 10 trials)
fraction of goals found within the 8 minute trial sim-
ulation. For objective-based search, the fitness score
was the same as the performance score. For novelty
search, the performance scores were calculated for
extrinsic record-keeping, but they did not influence
the search process in any way. Instead, individuals
were selected for reproduction based on the novelty of
their behavior, with behavior characterized as a high-
dimensional vector of the positions of the robots over
time. Specifically, normalized robot x and y coordi-
nates (between 0.0 and 1.0) were collected for each
robot every 10 (simulated) seconds. The 10 trials pro-
duced 10 such histories, and these were condensed
by taking the mean and the standard deviation across
trials, thus storing data estimating each robot’s dis-
tribution of possible positions over time. Following
prior research (Lehman and Stanley, 2011), novelty
was calculated using the Euclidean distance between
this behavior vector and the vectors already stored in
the novelty archive
1
. Extrinsic to the search process,
the best-performing individual in each generation was
recorded, and its performance was re-evaluated using
30 random seeds in order to obtain a more accurate
and unbiased estimate of that individual’s true perfor-
mance level (for plotting and analysis of results).
1
For an introduction to novelty search and more details
about the method, see (Lehman and Stanley, 2011)
Figure 3: Average performance of the best individuals dur-
ing neuroevolution. Error bars show 95% confidence inter-
vals for the mean.
4 RESULTS AND DISCUSSION
4.1 Search Algorithm Results
The full search algorithm experiments described
above for objective-based and novelty search were
each run 30 times. The average performance over
evolutionary time is shown in Figure 3. In theory, a
perfect solution would have a performance value of 1,
indicating that the robots located every target in all
simulated trials. There are pragmatic reasons why
this theoretical maximum is likely unattainable: a)
the robots were only given 8 minutes, which is prob-
ably insufficient to completely cover the region b) the
robots’ lack of communication makes some duplica-
tion of coverage unavoidable, and c) the targets are
large enough that it is not uncommon for two robots to
find and “stay” at the same target (although the hope
is that they will sense the other robot’s presence and
turn away). Given these factors, we judged that both
searches were able to discover fairly good solutions
relatively quickly, suggesting that the algorithms are
working effectively, although the MAMTSS problem
as we have posed it may be a less challenging bench-
mark problem than we had anticipated.
Recall that NS is not guided toward high per-
formance individuals, but is instead guided toward
novel behaviors, and is often able to find high perfor-
mance individuals along the way (Lehman and Stan-
ley, 2011). After finding high-performance individu-
als and adding their behaviors to the novelty archive,
NS’s appetite for novelty may lead it toward less-
fit behaviors, a phenomenon which likely explains
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm
385

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Unevolved
Objec�ve
Novelty
Human
Fraction of
Targets
Found
Simulation, varying layouts (n=1000)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Unevolved
Objec�ve
Novelty
Human
Fraction of Targets Found
Physical (n=32)
Simulation (n=100)
Figure 4: LEFT: Performance on the 8-agent MAMTSS task based on 1000 trials with different (random) target layouts.
RIGHT: Comparison of physical & simulated trials for one specific (fixed) target layout. Error bars show 95% confidence on
the mean.
why there is a slight downward slope for novelty
search’s performance in later generations. The aver-
age final-generation performance for objective-based
search was statistically higher (t-test, p < 0.01) than
for novelty search, but this was not the case in gener-
ation 35 (p > 0.6).
From the 30 objective-based searches, we selected
the highest-performing individual from any of the 30
final populations. From the 30 novelty searches, we
selected the highest-performing individual from any
generation, which happened to be generation 76 of
one of the runs.
Because performance varies considerably based
on the placement of the targets, we ran a more ex-
tensive test of the performance of the best neuro-
controller from objective-based search and novelty
search. To see the progress evolution had made, as
a baseline we also included an “unevolved” neuro-
controller which was the best performing controller
(out of 100 randomly generated individuals) from
the initial population of the same objective-based
search that eventually produced the best performer.
Finally, we included a human-designed controller
in the test, to see how the evolved solutions com-
pared against human ingenuity/intuition. The human-
designed controller was not a neurocontroller, since
hand-designing neural nets is not an area where hu-
mans excel, but rather an algorithm (designed by un-
dergraduate research assistants) that used the same
12 distance measurements as input and produced a
movement angle as output. Specifically, the human-
designed algorithm was to move forward as long as
there was at least 0.5 meters clear in front of it, and
otherwise it would choose to turn to face the direc-
tion that offered the farthest clear line-of-sight. The
preference for moving forward was based on the intu-
ition that it is beneficial to cover as much ground as
possible (as opposed to a random walk which diffuses
slowly through the space), while also attempting to
fill in open spaces. These four controllers were run in
simulation for 1000 trials with different random target
layouts; the performance results are shown in the left
panel of Figure 4.
The key observations (which are all statistically
significant at p < 0.01) are as follows:
1. The evolved and human-designed controllers sub-
stantially outperform the unevolved controller.
2. We confirmed that the neurocontroller from
objective-based search slightly outperforms that
from novelty search on the MAMTSS task.
3. Both the evolved controllers outperform the
human-designed controller.
This last point underscores the effectiveness of neuro-
evolution in this domain. However, in fairness to
the humans, we note that the evolved algorithms are
very likely exploiting the fixed geometry of the course
(e.g. by preferring left turns over right turns), whereas
the human-designed algorithm did not attempt to ex-
ploit this geometric bias. To better visualize the col-
lective motion of the robot swarm, Figure 5 shows
the probability of each location (discretized at 10 cm
resolution) being explored by a robot after 2 and 8
minutes. The slightly lower performance by nov-
elty search may stem from the robots staying a little
further away from the walls than with the objective-
based controller.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
386
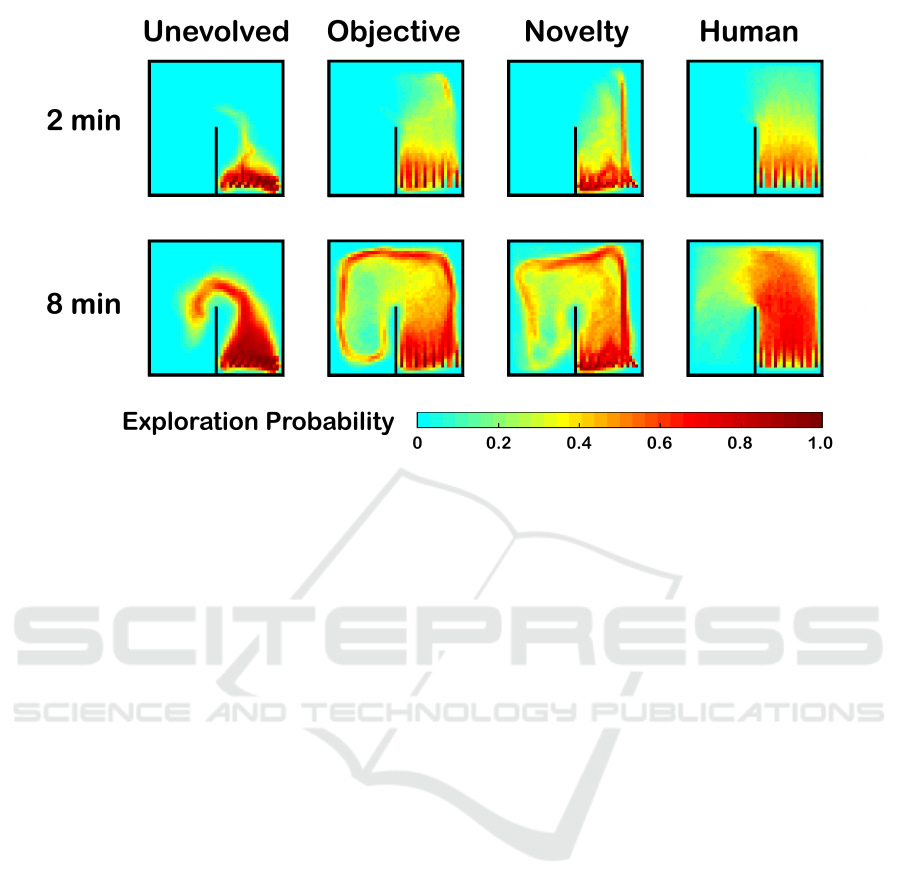
Figure 5: Heat maps of the locations likely to be explored by the various controllers, measured as the empirical probability
of robot traversal during 1000 trials. The evolved neurocontrollers (objective & novelty) reliably explore both halves of the
environment, while the human-designed controller achieves excellent coverage of the starting half, but rarely makes much
progress around the corner.
4.2 Physical Robot Results
The next test was how our evolved controllers would
perform in the real/physical robotics MAMTSS task,
compared with the software simulation. For this ex-
periment, to reduce noisy performance values based
on target placement, we chose just one (fixed) random
target layout (the one shown in Figure 2). We trans-
ferred the same four neurocontrollers discussed above
onto the LEGO EV3 robots, and performed 32 8-
minute trials for each controller on this layout, record-
ing the number of targets located after each trial. We
also ran the software simulation with this specific lay-
out 100 times. The results of this experiment are
shown in the right panel of Figure 4. The physical re-
sults correlated strongly with the simulated results for
this layout, offering evidence that the software sim-
ulator provides sufficient verisimilitude. The physi-
cal results also matched the same rank order found
in the simulation results across random target lay-
outs. The objective controller outperformed the nov-
elty controller on the physical task (t-test, p < 0.03),
and the novelty controller appeared to outperform the
human-designed controller, but this comparison lacks
statistical significance due to the high variance of the
number of targets found across trials. The slightly
lower performance on the physical task vs. the simu-
lated task may be due in part to the fact that occasion-
ally robots would get jammed or ensnared with other
robot chassis, or even knocked over by another robot,
causing it to be disabled for the remainder of the
trial – contingencies not included in our simulation
software.
4.3 Further Observations
We decided to look more closely at the actual neu-
ral networks that were evolved, and were surprised to
discover that the best-performing evolved neurocon-
troller from the objective-based search included just
one synapse, meaning that the robot was computing
an angle to turn based on only one of the 12 dis-
tance sensor readings. The best-performing controller
found by novelty search was also relatively simple,
employing just three synapses. Whereas prior re-
search found that novelty search provided better per-
formance and “the ANN controllers from the maze
domain and the biped walking task discovered by
NEAT with novelty search contain about three times
fewer connections than those discovered by objective-
based NEAT” (Lehman and Stanley, 2011), we found
the opposite. For the MAMTSS task, objective-based
search slightly outperformed novelty search, and the
best performing ANN from novelty search had three
times more connections than the objective-based con-
troller. The multiplicative ratio overstates the case
here, since 3 synapses versus 1 synapse is a small ab-
solute difference, and may not be significant.
To determine whether we had allowed NEAT long
enough to evolve more complex neural structures, we
plotted the number of synapses in the best neural nets
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm
387
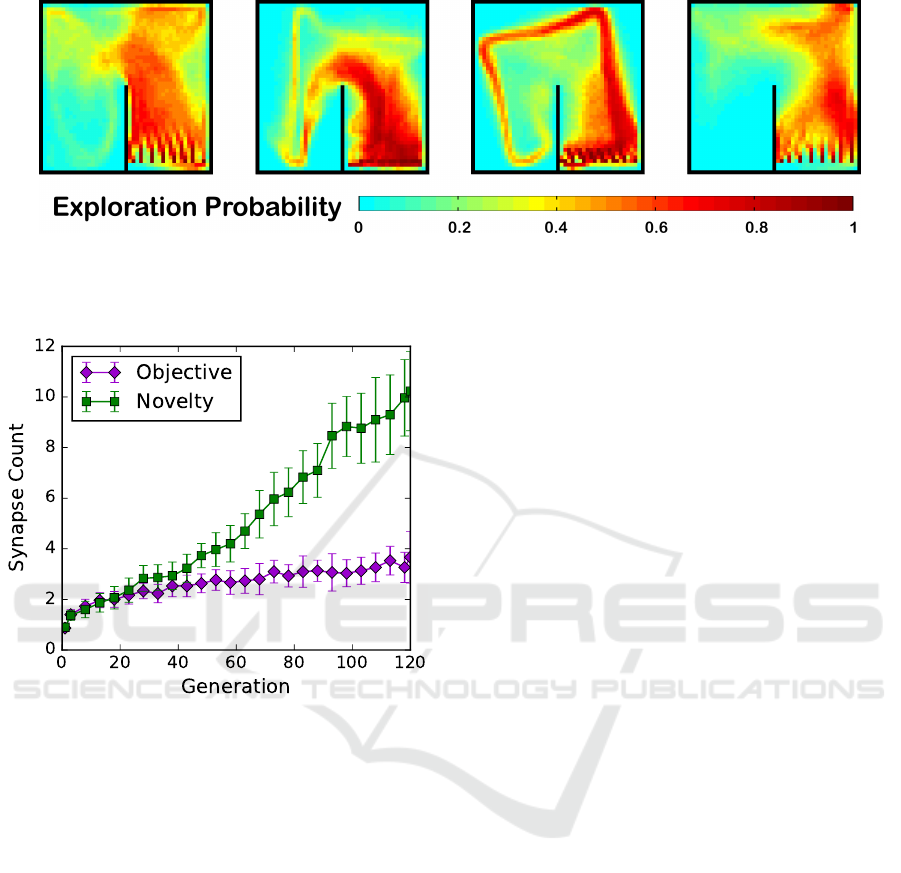
Figure 6: Maps showing empirical probabilities of robot traversal during 1000 trials, for four of the more complex best-
performing neurocontrollers, taken from the final generations of the novelty searches.
Figure 7: Neural complexity (measured by number of
synapses) of the best individuals as the searches progressed.
Error bars show 95% confidence intervals for the mean.
from each generation, as shown in Figure 7. This
demonstrated that there was time for more complex
neural networks to evolve, and that novelty search,
in its quest for new behaviors, was evolving them.
However, more complex neural nets did not tend
to lead to better performance on MAMTSS, which
would explain why novelty search’s performance be-
gan to degrade in later generations, as well as why the
objective-based search was avoiding evolving more
complex networks. The collective motion behavior
for a few of the more complex (15-19 synapses) net-
works taken from a final generation of novelty search
are displayed in Figure 6. Although these heat maps
collapse robot positions over time, a variety of quali-
tatively different swarm movement behaviors are still
quite evident, in accordance with the modus operandi
for novelty search.
5 CONCLUSIONS AND FUTURE
WORK
Upon reflection, novelty search was working quite
well – it was successfully evolving a range of com-
plex/interesting swarm motion behaviors. However,
high performance solutions to the posed MAMTSS
task were possible with simple neurocontrollers. The
speed with which objective-based search was able to
converge on these suggests that the problem was rel-
atively easy (although we had no a priori reason to
suspect this would be the case), and that this fitness
landscape is mostly non-deceptive. Our finding that
objective-based search (slightly) outperformed nov-
elty search on this task is in accord with an earlier
project (Gomes et al., 2013) that found objective-
based search was superior to novelty search for their
simulated swarm aggregation task, which they also at-
tributed to the fitness function not being particularly
deceptive.
For future work, it would be interesting to
explore more complex boundary geometries, as
well other variants of the MAMTSS, with improved
robot sensing capabilities or some form of limited
communication allowed between robots. Would such
variants offer additional challenge and/or deceptive
search spaces where novelty search would outper-
form objective-based search? Furthermore, narrow
passageways can form bottleneck difficulties for
robot swarms, and it would be interesting to compare
evolved solutions against recent approaches such as
fear modeling (Konarski et al., 2016). It would also
be informative to perform a scaling analysis on the
size of the task. Would evolution using a large swarm
of robots in a large environment produce qualitatively
different behaviors than those we evolved for a small
swarm in a small space?
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
388

To summarize, in this paper we have:
1. defined a new swarm robotics task (MAMTSS)
2. solved MAMTSS using neuro-evolution, with
both novelty and objective-based search yielding
better than human-designed performance
3. tested these neurocontrollers and showed
verisimilitude between the simulation and the
physical robots.
4. characterized the resulting swarm behavior for
various neurocontrollers
Even though our formulation of the MAMTSS
robot exploration task turned out to be simpler than
anticipated, this study still provides one more data
point that explores the relative trade-offs between
novelty and objective-based search within the domain
of neuroevolution for swarm robotics.
ACKNOWLEDGEMENTS
We thank Augustana College for its support of this
project through internal research grants.
REFERENCES
Brambilla, M., Ferrante, E., Birattari, M., and Dorigo, M.
(2013). Swarm robotics: a review from the swarm
engineering perspective. Swarm Intelligence, 7(1):1–
41.
Choset, H. (2001). Coverage for robotics – a survey of re-
cent results. Annals of Mathematics and Artificial In-
telligence, 31(1):113–126.
Coleman, O. (2012). AHNI (Another HyperNEAT Imple-
mentation). [Computer Software].
Davids, A. (2002). Urban search and rescue robots: from
tragedy to technology. IEEE Intelligent Systems,
17(2):81–83.
Gomes, J., Urbano, P., and Christensen, A. L. (2013). Evo-
lution of swarm robotics systems with novelty search.
Swarm Intelligence, 7(2-3):115–144.
Ichikawa, S. and Hara, F. (1999). Characteristics of object-
searching and object-fetching behaviors of multi-
robot system using local communication. In IEEE
International Conference on Systems, Man, and Cy-
bernetics, volume 4, pages 775–781 vol.4.
Konarski, M., Szominski, S., and Turek, W. (2016). Mo-
bile robot coordination using fear modeling algorithm.
International Journal of Mechanical Engineering and
Robotics Research, 5(2):96.
Lehman, J. and Stanley, K. O. (2011). Abandoning objec-
tives: Evolution through the search for novelty alone.
Evolutionary computation, 19(2):189–223.
Lund, H. H. (2003). Co-evolving control and morphology
with LEGO robots. In Morpho-functional Machines:
The New Species, pages 59–79. Springer.
McLurkin, J. and Smith, J. (2007). Distributed Au-
tonomous Robotic Systems 6, chapter Distributed Al-
gorithms for Dispersion in Indoor Environments Us-
ing a Swarm of Autonomous Mobile Robots, pages
399–408. Springer Japan, Tokyo.
Parker, G. B. and Georgescu, R. A. (2005). Using cyclic
genetic algorithms to evolve multi-loop control pro-
grams. In Mechatronics and Automation, 2005 IEEE
International Conference, volume 1, pages 113–118.
IEEE.
Rekleitis, I., Lee-Shue, V., New, A. P., and Choset, H.
(2004). Limited communication, multi-robot team
based coverage. In Proceedings of the 2004 IEEE In-
ternational Conference on Robotics and Automation,
volume 4, pages 3462–3468. IEEE.
Reynolds, C. W. (1987). Flocks, herds and schools: A
distributed behavioral model. In SIGGRAPH ’87:
Proceedings of the 14th annual conference on Com-
puter graphics and interactive techniques, pages 25–
34, New York, NY, USA. ACM.
Risi, S., Vanderbleek, S. D., Hughes, C. E., and Stanley,
K. O. (2009). How novelty search escapes the decep-
tive trap of learning to learn. In Proceedings of the
11th Annual Conference on Genetic and Evolution-
ary Computation, GECCO ’09, pages 153–160, New
York, NY, USA. ACM.
Stanley, K. O. and Miikkulainen, R. (2002). Evolving neu-
ral networks through augmenting topologies. Evolu-
tionary computation, 10(2):99–127.
Wagner, I. A., Altshuler, Y., Yanovski, V., and Bruckstein,
A. M. (2008). Cooperative cleaners: A study in ant
robotics. The International Journal of Robotics Re-
search, 27(1):127–151.
Wilensky, U. (1999). Netlogo. Center for Connected
Learning and Computer-Based Modeling, Northwest-
ern University, Evanston, IL.
Novelty and Objective-based Neuroevolution of a Physical Robot Swarm
389
