
Integration of Independence Detection into
SAT-based Optimal Multi-Agent Path Finding
A Novel SAT-based Optimal MAPF Solver
Pavel Surynek
1,2
, Jiří Švancara
2
, Ariel Felner
3
and Eli Boyarski
4
1
National Institute of Advanced Industrial Science and Technology (AIST), Tokyo, Japan
2
Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic
3
Ben Gurion University, Beer-Sheva, Israel
4
Bar-Ilan University, Ramat-Gan, Israel
Keywords: Multi-Agent Path-Finding (MAPF), Independence Detection (ID), Propositional Satisfiability (SAT), Cost
Optimality, Makespan Optimality, Sum-of-costs Optimality, SAT Encodings, Path-Finding on Grids.
Abstract: The problem of optimal multi-agent path finding (MAPF) is addressed in this paper. The task is to find optimal
paths for mobile agents where each of them need to reach a unique goal position from the given start with
respect to the given cost function. Agents must not collide with each other which is a source of combinatorial
difficulty of the problem. An abstraction of the problem where discrete agents move in an undirected graph
is usually adopted in the literature. Specifically, it is shown in this paper how to integrate independence de-
tection (ID) technique developed for search based MAPF solving into a compilation-based technique that
translates the instance of the MAPF problem into propositional satisfiability formalism (SAT). The independ-
ence detection technique allows decomposition of the instance consisting of a given number of agents into
instances consisting of small groups of agents with no interaction across groups. These small instances can
be solved independently and the solution of the original instance is combined from small solutions eventually.
The reduction of the size of instances translated to the target SAT formalism has a significant impact on
performance as shown in the presented experimental evaluation. The new solver integrating SAT translation
and the independence detection is shown to be state-of-the-art in its class for optimal MAPF solving.
1 INTRODUCTION
Multi-Agent Path Finding (MAPF) is the task is of
finding collision free paths for a set of mobile agents
so that each agent can reach its goal position from
given start by following its path (Kornhauser et al.,
1984, Silver, 2005, Surynek, 2009, Sharon et al.
2013). The MAPF problem recently attracted consid-
erable attention from the research community and
many concepts and techniques have been devised to
address this problem.
An abstraction in which an environment with
agents is represented by undirected graph is used in
the literature (Wilson, 1974, Ryan, 2008). Agents in
this abstraction are items placed in vertices of the
graph. Edges represent passable regions. Physical
space occupancy of agents is represented by the re-
striction that at most one agent can be placed in each
vertex. The time is discrete which means that agents
can do a single move in a time step.
Various movement schemes exist for this MAPF
abstraction graph. Usually an agent can move into an
unoccupied neighbor vertex not entered by another
agent at the same time – this will be called move-to-
unoccupied variant. Obviously, this variant requires
at least one vertex in the graph unoccupied to be able
to perform some movements at all.
But other variants like chain movement of agents
where a chain of agents moves all at once with only
the leader entering the unoccupied vertex exist
(Surynek, 2010). Even cases with no unoccupied ver-
tex in the graph were described in the literature (Yu,
LaValle, 2013a). These usually allow movements of
agents by rotating them along non-trivial cycles in
graph (that is, cycles containing at least 3 vertices.
Otherwise, allowing rotation over a trivial cycle con-
sisting of a single edge would simplify the problem to
Surynek P., Å
˘
avancara J., Felner A. and Boyarski E.
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver.
DOI: 10.5220/0006126000850095
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 85-95
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
85

a practically not useful variant as arbitrary swaps of
pairs of agents would then be possible).
The techniques shown in this paper are generic
across all these variants although we base our presen-
tation just on the basic variant move-to-unoccupied.
The MAPF problem and its variants are strongly
practically motivated. Applications range from navi-
gation of multiple mobile robots (Berg et al., 2010,
Čáp et al., 2013), through traffic optimization (Mi-
chael et al., 2010, Kim et al., 2014), to movement
planning in computer games (Wang, Botea, 2008).
We refer the reader to various studies such as (Sharon
et al. 2013, 2015) for the detailed survey of applica-
tions.
1.1 Optimality in MAPF
In this paper, we specifically address optimal MAPF
in which paths that are optimal with respect to a given
objective are searched. The two basic objectives stud-
ied in the literature are makespan (Surynek, 2014) and
sum-of-costs (Standley & Korf, 2011, Sharon et al.,
2013).
Under the makespan objective the aim is to ob-
tain a plan that can be executed in as short as possible
time while each movement consumes 1 unit of time.
In the terms of agents /paths, we need the longest path
out of all the paths to be as short as possible.
The sum-of-costs objective assumes that unit
costs are assigned to actions agents can do where ac-
tion is either a movement or a wait action. The cost of
plan is the sum of action costs along all the paths and
over all the agents. The aim is to obtain a plan with
the minimum cost. Intuitively, the sum-of-costs ob-
jective corresponds to the energy consumed by agents
when moving.
As we will show later, there may be situations
where the increase in the sum-of-costs leads to a
shorter makespan. This has practical/physical anal-
ogy where sometimes time can be saved at the cost of
higher energy consumption.
Finding a feasible solution of MAPF can be done
in polynomial time (Kornhauser et al., 1984, de Wilde
et al., 2014). Adding any of the discussed objectives
renders the decision version of MAPF (that is, we ask
a yes/no question if a given MAPF has a solution of
specified makespan/sum-of-costs) to be NP-complete
(Ratner, Warmuth, 1990, Surynek, 2010).
We will keep the further description around the
sum-of-costs variant but it is important to note that
the presented techniques apply for the makespan var-
iant as well.
1.2 Contributions to SAT-based MAPF
One of successful approaches for solving MAPF op-
timally is to translate the decision version into prop-
ositional formula (Kautz, Selman, 1999, Huang et al.
2010). The formula is satisfiable if and only if the in-
stance of MAPF is solvable for a given value of the
objective function. Assuming that satisfiability of
such formula is a non-decreasing function of the
value of objective function, it is easy to obtain the op-
timum by querying the satisfiability multiple times. A
trivial strategy of increasing the value of objective
function by one turned out to be the most efficient so
far (Surynek et al., 2016) – this is mostly because of
the non-uniform difficulty of each query.
Satisfiability of the formula can be decided by an
off-the-shelf SAT solver (Biere et al., 2009, Aude-
mard, Simon, 2009) which is one of the advantages of
the SAT-based approach. All the very advanced tech-
niques developed in recent decades for SAT solving
are employed for solving MAPF - SAT Competitions
(Balint et al., 2015) refers nicely about the huge pro-
gress in SAT solvers.
The most significant bottleneck of all the existing
SAT-based algorithms for MAPF is the large size and
combinatorial difficulty of the target propositional
formula that grow significantly with the increasing
number of agents as well as with growing size of the
underlying graph.
This kind of growth of combinatorial difficulty
has already been addressed by Standley (2010) in his
search-based optimal MAPF solving algorithm.
Standley described a method called independence de-
tection (ID) that tries to determine the smallest possi-
ble groups of agents for which paths can be found in-
dependently of other groups. The ID technique turned
out to be extremely beneficial when integrated with
an algorithm for finding paths that is exponential in
the number of agents. This is also the case of SAT-
based MAPF solving.
Our contribution is integrating ID with
MDD-SAT the most recent SAT-based MAPF solver
(Surynek et al., 2016). As there are differences in how
the original Standley’s search-based algorithm and
SAT-based approach work we suggested modifica-
tions to ID to be compatible with the SAT-based ap-
proach. Our new solver is called MDD-SAT+ID fol-
lowing the notation of (Standley, 2010). Conducted
experiments demonstrate similar performance benefit
as in the case of original application of ID. Consider-
ing that MDD-SAT has been state-of-the-art for a cer-
tain class of MAPF instances, the new MDD-
SAT+ID represents new progress.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
86
The paper is organized as follows. After the for-
mal introduction of the MAPF problem a brief expo-
sition of related work is done. Then, the original ID is
recalled and integration of ID with the SAT-based ap-
proach is presented. Finally, an experimental evalua-
tion with grids and large maps is presented.
2 DEFINITIONS
An arbitrary undirected graph can be used to model
the environment where agents are moving. Let
,
be such a graph where
,
,…,
is a
finite set of vertices and ⊆
is a set of edges.
The placement of agents in the environment is
modeled by assigning them vertices of the graph. Let
,
,…,
be a finite set of agents. Then, an
arrangement of agents in vertices of graph will be
fully described by a location function : ⟶ ; the
interpretation is that an agent ∈ is located in a
vertex . At most one agent can be located in
each vertex; that is is uniquely invertible.
Definition 1 (MAPF). An instance of multi-agent
path-finding problem is a quadruple Σ
,
,,
,
where location functions
and
define the initial and the goal arrangement of a set of
agents in respectively.
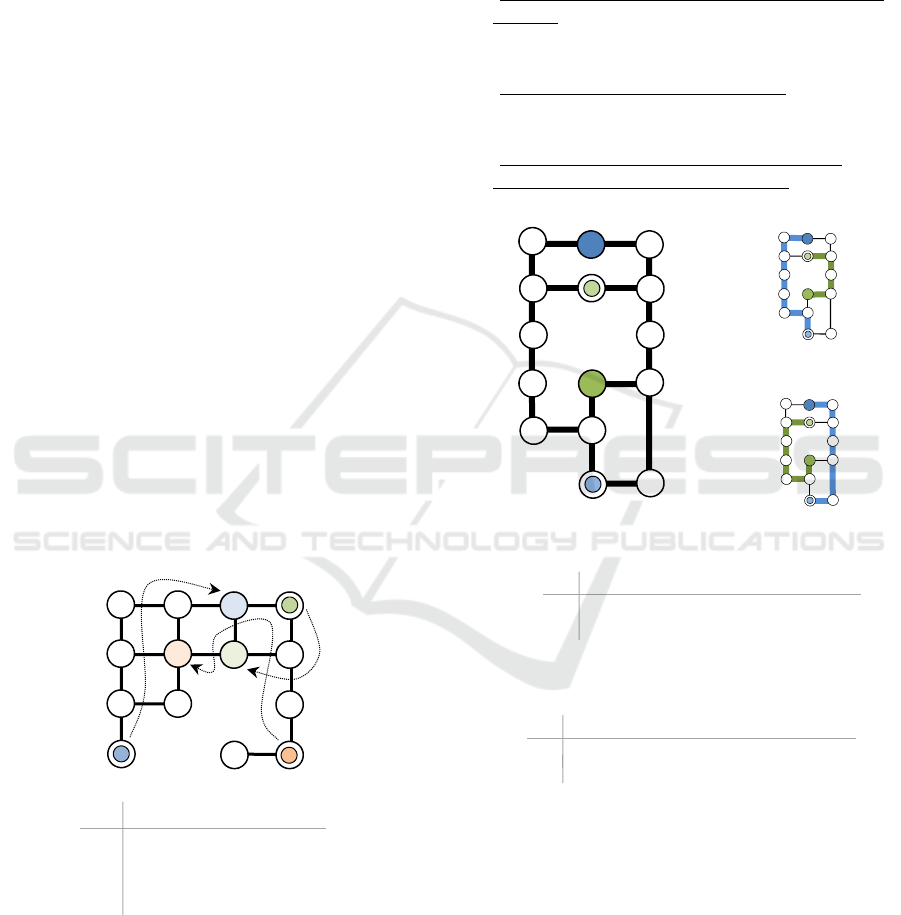
Figure 1: An example of a MAPF instance with three agents
,
, and
. A solution of the instance is shown below.
The dynamicity of the model assumes a discrete
time divided into time steps. An arrangement
at the
-th time step can be transformed by a transition ac-
tion which instantaneously moves agents in the non-
colliding way to form a new arrangement
. The
transition between
and
must satisfy the fol-
lowing validity conditions:
∀ ∈ either
or
,
∈ holds
(agents move along edges or wait at their current
location),
∀ ∈
⇒
(agents move to vacant vertices only), and
∀, ∈ ⇒
(no two agents enter the same target/unique
invertibility of resulting arrangement).
Figure 2: An instance of the MAPF problem in which no
makespan optimal solution is sum-of-costs optimal and no
sum-of-costs optimal solution is makespan optimal.
The task in MAPF is to transform
using above
valid transitions to
. An illustration of MAPF and
its solution is depicted in Figure 1.
Definition 2 (MAPF solution). A solution MAPF in-
stance Σ,,
,
is a sequence of arrange-
ments
,
,
,…,
where
and
is
α
0
5
1
9
2
6
10
3
7
4
8
11
12
13 14
a
1
a
2
a
3
a
1
a
2
a
3
α
0
v
1
v
2
v
7
α
1
v
1
v
3
v
4
α
2
v
2
v
3
v
4
α
3
v
5
v
3
v
1
α
4
=α
+
v
8
v
3
v
2
MAPFΣ=(G,{a
1
,a
2
,a
3
},α
0
,α
+
)
α
+
1
2
3
4
5
6
A
C
F
D
E
a
2
a
1
7
8
9
B
μ=7
ξ*=11
μ*=6
ξ=12
a
1
a
2
α
0
A
7
α
1
F
2
α
2
E
3
α
3
D
4
α
6
=α
+
6
8
α
4
C
5
α
5
B
9
Optimalmakespanμ*
Sub‐optimalsum‐of‐costsξ
a
1
a
2
α
0
A
7
α
1
9
C
α
2
5
D
α
3
4
E
α
7
=α
+
6
8
α
4
3
8
α
5
2
8
α
6
1
8
Optimalsum‐of‐costsξ*
Sub‐optimalmakespanμ
(1)
(2)
(3)
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver
87
a result of valid transition from
for every
1,2, … , 1 . □
Makespan is the total number of time steps until
the last agent reaches its destination. Sum-of-costs
denoted is the sum of path costs per individual
agents. Each action (including wait) of an agent
before it reaches its goal has unit cost.
2.1 Makespan vs. Sum-of-costs
There exists an instance in which all the sum-of-costs
optimal solutions are not makespan optimal. Simi-
larly, none of the makespan optimal solution is sum-
of-costs optimal there (see Figure 2 for illustration).
In the SAT-based optimal MAPF solver described
below, a proper relation between makespan and sum-
of-costs need to be found as both objectives are
bounded during search. We need to ensure that small-
est cost found under the given makespan bound is op-
timal (see (Surynek et al., 2016) for more detailed dis-
cussion).
3 RELATED WORK
Many other successful algorithms exist for the opti-
mal MAPF solving. The state-of-the-art search-based
algorithms (though there is no universal winner) in-
clude increasing cost tree search - ICTS (Sharon et
al., 2013), conflict base search - CBS (Sharon et al.,
2015), and improved CBS – ICBS (Boyarski et al.,
2015). These algorithms excel in setups with rela-
tively few agents on large maps.
Another research direction is represented by
methods based on reduction of the MAPF problem to
another formalism. Except the SAT as a target for-
malism, successful attempts to reduce MAPF to con-
straint optimization problem (Ryan, 2010), inductive
logic programming (Yu, LaValle, 2013b), and an-
swer set programming (Erdem et al., 2013) have been
made. These approaches (the SAT approach includ-
ing) can be generally characterized by a high perfor-
mance in MAPFs with small underlying graph
densely populated with agents. This is a natural out-
come of the maturity of solvers used to solve hard
combinatorial problems in the target formalism.
Recently new research directions driven by ap-
plications have been identified in the MAPF context.
For example it is not always necessary to distinguish
between individual agents – see (Ma, 2016) for de-
tailed survey.
4 INDEPENDENCE DETECTION
Our major aim is to increase performance of the SAT-
based MAPF solver by reducing the number of agents
need to be considered at once. This has been success-
fully done in search based methods via a technique
called independence detection.
In this section, we will describe the original
method of independence detection proposed by
Standley (2010). The main idea behind this technique
is that difficulty of MAPF solving optimally grows
exponentially with the number of agents. It would be
ideal, if we could divide the problem into a series of
smaller sub problems, solve them independently at
low computational effort, and then combine them.
The simple approach, called simple independence
detection (SID), assigns each agent to a group so that
every group consists of exactly one agent. Then, for
each of these groups, an optimal solution is found in-
dependently. Every pair of these solutions is evalu-
ated and if the two groups’ solutions are in conflict
(that is, when collision of agents belonging to differ-
ent group occurs), the groups are merged and re-
planned together. If there are no conflicting solutions,
the solutions can be merged to a single solution of the
original problem. This approach can be further im-
proved by avoiding merging of groups.
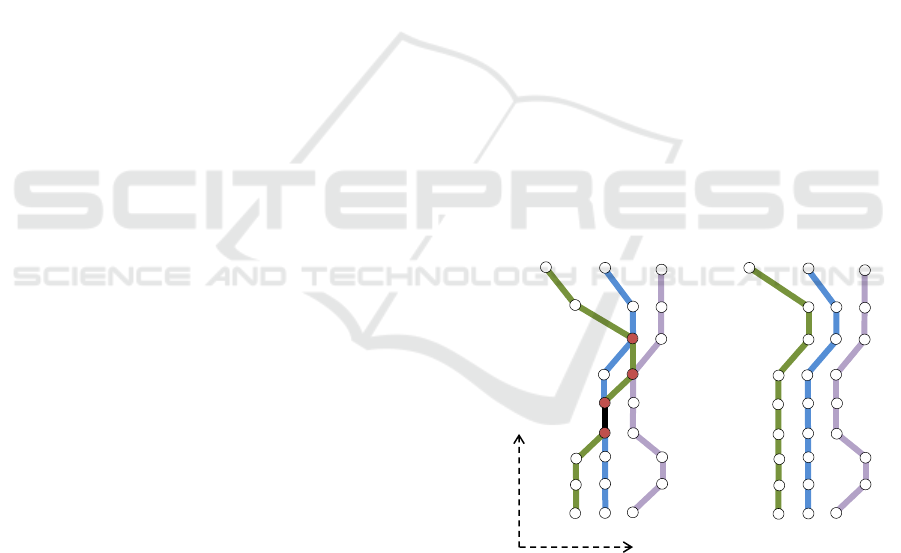
Figure 3: A schematic illustration of path replanning within
the independence detection technique. A path for the group
conflicted with paths of other two groups (left part).
Then path for
has been successfully replanned (right
part).
Generally, each agent has more than one possible
optimal path. However, SID considers only one of
these paths. The improvement of SID known as inde-
pendence detection (ID) is as follows. Let’s have two
conflicting groups
and
. First, try to replan
vertices
time
u
2
u
1
u
3
u
4
u
5
u
2
u
1
u
3
u
4
u
5
G
1
G
2
G
3
G
1
G
2
G
3
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
88

so that the new solution has the same cost and the
steps that are in conflict with
are forbidden. If no
such solution is possible, try to similarly replan
. If
this is not possible, merge
and
into a new group.
In case either of the replanning was successful, that
group needs to be evaluated with every other group
again. This can lead to infinite cycle. Therefore, if
two groups were already in conflict before, merge
them without trying to replan.
Standley uses ID in combination with the A* al-
gorithm. While planning, it is preferred to find paths
that create the least possible amount of conflicts with
other groups that have already planned paths. For this
purpose, the conflict avoidance table is created (see
Algorithm 1 for pseudo-code).
Algorithm 1: MAPF solving algorithm based on independ-
ence detection technique. Planning for groups is always
done to have least number of conflicts with respect to con-
flict avoidance table.
assign each agent to a group;
plan a path for each group by A*;
fill conflict avoidance table;
while conflicting groups exist
G
1
, G
2
= conflicting groups;
if G
1
, G
2
not conflicted before
replan G
1
by A* with illegal
moves based on G
2
;
if failed to replan G1
replan G
2
by A* with illegal
moves based on G1;
endif
endif
if no alternate paths for G
1
, G
2
merge G
1
and G
2
;
plan a path for new
group by A*;
endif
update conflict avoidance table;
end
return combined paths of all groups;
The table stores moves of agents in other groups.
In case A* has a choice between several nodes with
the same minimal cost, the one with least amount
of conflicts is expanded first. This technique yields an
optimal solution that has a minimal number of con-
flicts with other groups. This property is useful when
replanning of a group’s solution is needed.
Both SID and ID do not solve MAPF on their
own, they only divide the problem into smaller sub-
problems that are solved by any possible MAPF algo-
rithms. Thus, ID and SID are general frameworks
which can be executed on top of any MAPF solver.
5 INTEGRATING ID INTO SAT
We describe how to integrate ID into SAT-based
solving of MAPF in this section. Recently, SAT-
based MAPF solving has been shown to be consider-
ably successful technique for obtaining both
makespan or sum-of-costs optimal solutions.
The basic idea of SAT-based MAPF solving is to
reduce the decision question of whether there exists a
solution of a given MAPF of a given value of objec-
tive (makespan or sum-of-costs) into a propositional
formula. This process of reduction is called encoding
in the literature. There exist many types of encodings
of MAPF to propositional formulae (Surynek et al.,
2016).
The resulting propositional formula is then
solved by the off-the-shelf SAT solver (Audemard,
Simon, 2013). If the formula is satisfiable, a solution
to MAPF is obtained by interpreting back the mean-
ing of propositional variables in the satisfying valua-
tion of the formula. Unsatisfiable formula means that
the given MAPF has no solution under the given
value of objective function.
Encodings are generally based on time expan-
sion of the underlying graph , that is, the graph is
copied for each time step up to the given limit. In such
expanded graph, we are able to record positions of all
the agents at individual time-steps which is repre-
sented as a standard placement of agents at the given
level of the time expanded graph. This is the common
feature of all existing encodings for optimal MAPF
solving. They however differ in how the positions of
agents within levels of the time expanded graph are
represented. Some encodings use binary representa-
tion of positions (sometimes called also log-space
representation as a vector of
log
propositional
variables is used to represent possible positions of
an agent).
Other representations use a single propositional
variable per time/space position within the time ex-
panded graph. These are sometimes called direct rep-
resentations.
Although binary representations result in smaller
formulae in terms of the number of variables and con-
straints they provide limited search space pruning and
propagation. Hence, they are usually outperformed by
encodings that use direct representation where the
benefit of propagation outweighs larger size of the
formulae.
The optimal solution in the SAT-based approach
is searched by a sequence of queries to the SAT solver
with increasing values of the objective encoded in
formulae. Assuming that the solvability of MAPF
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver
89

(satisfiability of a formula) is a non-decreasing func-
tion of the value of the objective, the optimum can be
found easily. The most efficient strategy is to simply
start from the lower bound of the objective and incre-
ment it until the first satisfiable formula is encoun-
tered. The satisfying valuation of the formula repre-
sents an optimal solution. This strategy is applicable
both to makespan to sum-of-costs optimization.
5.1 Multi-value Decision Diagrams
As discussed in (Surynek et al., 2016), the limitation
of many existing encodings is their size which is im-
plied by the size of the time expanded graph. To mit-
igate this limitation Surynek et al. took inspiration
from another successful search-based solver called
increasing cost tree search (ICTS) (Sharon et al.,
2013).
ICTS uses a data structure called multi-value de-
cision diagram (MDD) that is very similar to time ex-
panded graph considered for a single agent (TEG).
But unlike TEG, only those nodes that can be actually
visited by the agent under the given value of objective
function are included in MDD.
For example, assume that the value of objective
function requires agent makes no more than
moves. Then MDD for agent will contain only ver-
tices on paths connecting
with
of
lengths at most .
Using MDDs can rule out many vertices that
would be normally considered in standard time ex-
pansions. Experiments confirmed that MDDs enabled
using the SAT-based approach even for large MAPF
instances for which the size of encodings without
MDD was prohibitive.
5.2 MDD-SAT+ID
We will now describe integration of a variant of inde-
pendence detection into the SAT-based solver. This
represents the main contribution of this paper.
The standard SAT-based approach that uses
MDDs, called MDD-SAT, (Surynek et al., 2016) has
still considerable limitation when compared to exist-
ing search based techniques.
MDD-SAT considers the entire MAPF instance as
a whole which significantly limits the scalability of
this method. With large instances and many agents,
MDD-SAT will eventually encounter formula of pro-
hibitive size even with the use of MDDs. In all the
other optimal search-based solvers some variant of ID
is used to further mitigate the size of the instance
needed to be tackled at once.
Algorithm 2: Independence detection in the SAT-based
framework. Conflict aviodance is strictly required.
assign each agent to a group;
plan a path for each group
G
1
,…,G
k
by MDD-SAT;
fill conflict avoidance table;
while conflicting groups exist
G
1
, G
2
= conflicting groups;
if G
1
, G
2
not conflicted before
replan G
1
by MDD-SAT with
illegal moves
based on {G
1
,…,G
k
}-G
1
;
if failed to replan G
1
replan G
2
by MDD-SAT with
illegal moves
based on {G
1
,…,G
k
}-G
2
;
endif
endif
if no alternate paths for G
1
, G
2
merge G
1
and G
2
;
plan a path for
new group by MDD-SAT;
endif
update conflict avoidance table;
end
return combined paths of all groups;
The logical step is hence to integrate a variant of
ID into the SAT-based approach. We decided to do
that for MDD-SAT as it is currently the state-of-the-
art SAT-based solver for MAPF.
The SAT-based approach however requires mod-
ification of the original ID since in the propositional
formula it is not possible to express preference that
individual paths of groups of agents should avoid oc-
cupied positions in the conflict avoidance table. In the
yes/no SAT environment we either manage to avoid
occupied positions or not while in the negative case
there is no easy tool how to control the number of
conflicts.
The SAT-based version of ID works in similar
way to the original version of Standley but instead of
resolving conflicts between a pair of conflicting
groups
and
it resolves conflict of group
with
all other groups. If this attempt is successful,
is in-
dependent on others and the process can continue
with resolving conflicts between remaining groups
(see Figure 3 where
has been made independent).
If the attempt to resolve conflict between
and
by making
independent fails, the same is tried
for
. If the attempt for
fails too groups are
merged. The pseudo-code is shown as Algorithm 2.
In contrast to original ID we strictly require avoid-
ance with respect to the conflict avoidance table in-
stead of stating it as a preference only. This is techni-
cally done by omitting the conflicting vertices in the
MDD. The SAT approach does not allow to express a
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
90
preference like in the search based algorithm. This is
the reason why ID in the SAT-based solver differs
from the original one.
6 EXPERIMENTS
We performed experimental comparison of the sug-
gested MDD-SAT+ID solver with other state-of-the-
art solvers – namely with the previous best SAT-
based solver MDD-SAT and also with search-based
algorithms ICTS and ICBS.
The MDD-SAT+ID has been implemented in
C++ as an extension of an existing implementation of
the MDD-SAT solver. A couple of minor improve-
ments have been done in the original MDD-SAT en-
coding – some auxiliary propositional variables have
been eliminated which reduced the size of the encod-
ing and consequently saved runtime while generating
formulae (this improvement affects both MDD-SAT
and new MDD-SAT+ID used in presented experi-
ments).
We used Glucose 3.0 (Audemard, Simon,
2013) in MDD-SAT and MDD-SAT+ID which is a
top performing SAT solver according to the recent
SAT Competitions (Balint et al., 2015).
The complete implementation of the MDD-
SAT+ID solver is available on-line to allow reproduc-
ibility of the presented results: ktiml.mff.cuni.cz/
~surynek/research/icaart2017 .
ICTS and ICBS have been implemented in C#.
The original implementations of these algorithms
have been used.
All the tests were run on Xeon 2Ghz, and on
Phenom II 3.6Ghz, both with 12 Gb of memory.
The experimental setup followed the scheme
used in the literature (Silver, 2005) which tests MAPF
algorithms on 4-connected grids. Let us note however
that all the suggested algorithms are designed and im-
plemented for general undirected graphs (the fact that
grids are used in the experiments is not exploited to
increase efficiency of solving in any way).
6.1 Small Grids Evaluation
The first series of experiments takes place on small
square grids of sizes 88, 1616, and 3232 with
10% of vertices occupied by obstacles. In this setup
of the environment, we increased population of
agents from 1 and observed the runtime of all the
solvers until no solver was able to solve the instance
within the given time limit of 300 seconds (this was
20 agents for 88 grid, and 40 and 60 for 1616 and
3232 girds respectively).
Ten randomly generated instances per number of
agents were used. The initial positions were generated
by choosing a subset of vertices randomly. The goal
arrangement has been generated as a long random
walk from the initial state following valid moves –
this ensured solvability of all the tested instances.
To be able to communicate results of experiments
more easily we intuitively distinguish three different
categories of instances with respect to the density of
agents as follows. The behavior of solvers is then dis-
cussed with respect to these categories:
Low density – few interactions among agents,
paths for individual agents can be planned in-
dependently.
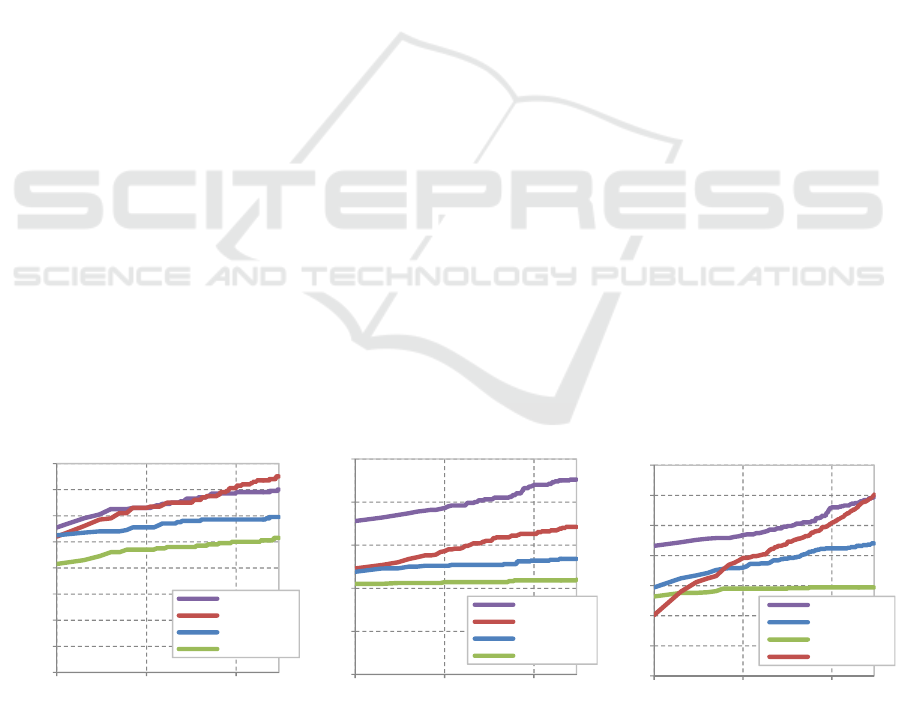
Figure 4: Results of experiments on small grid maps of sizes 88, 1616, and 3232. Figures show how many instances
were solved within the given runtime. Clearly MDD-SAT and MDD-SAT+ID dominate in the test over search based algo-
rithms ICTS and ICBS except few quickly solvable cases. Moreover, MDD-SAT+ID outperforms MDD-SAT in cases with
low to medium density of agents.
0
20
40
60
80
100
120
140
160
110100
Numberofinstances
Runtime(seconds)
Solvedinstances
Grid8x8|10%obstacles
MDD‐SAT+ID
MDD‐SAT
ICBS
ICTS
0
50
100
150
200
250
110100
Numberofinstances
Runtime(seconds)
Grid16x16|10%obstacles
MDD‐SAT+ID
MDD‐SAT
ICBS
ICTS
0
50
100
150
200
250
300
350
110100
Numberofinstances
Runtime(seconds)
Grid32x32 |10%obstacles
MDD‐SAT+ID
ICBS
ICTS
MDD‐SAT
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver
91
Medium density – some interaction among
agents are inevitable but there exist multiple
groups of agents that are independent of each
other.
High density – majority of agents are interde-
pendent and form one large group.
The small grid experiment contains instances
from all these three cases.
The hypothesis is that the ID technique will be
helpful in instances with medium density of agents.
We also expect that in the case of low density of
agents there will be some benefit of ID since many
agents will just follow their shortest paths towards
goals in such a case. In low and medium density cases
the complexity of the formula is not proportional to
the difficulty of the instance.
Furthermore, we expect rather negative effect of
using ID in instances with high density of agents. This
is because of the fact that most agents will be gradu-
ally merged into a large group while the process of
merging represents an overhead in such a case.
Experimental result for the small grids (see Figure
4) confirmed the hypothesis. MDD-SAT+ID clearly
wins in low to medium density of agents. For the
higher density, it tends to be outperformed by the
original MDD-SAT.
6.2 Large Maps – Dragon Age
We also experimented on three structurally different
large maps from Dragon Age: Origins (Sturtevant,
2012) – ost003d, den520d, and brc202d (see
Figure 5). Our choice of maps is driven by the choice
of authors in the previous literature (Sharon et al.,
2015, Surynek et al. 2016).
We used setup with 16 and 32 agents randomly
paced agents which represents low to medium den-
sity. Let us note that a case with high density of agents
in the map of that size currently out of reach of any
existing algorithm.
To obtain problems of various difficulties the
distance of agents from initial positions to their goals
has been varied in the range 8, 16, 24, …, 320.
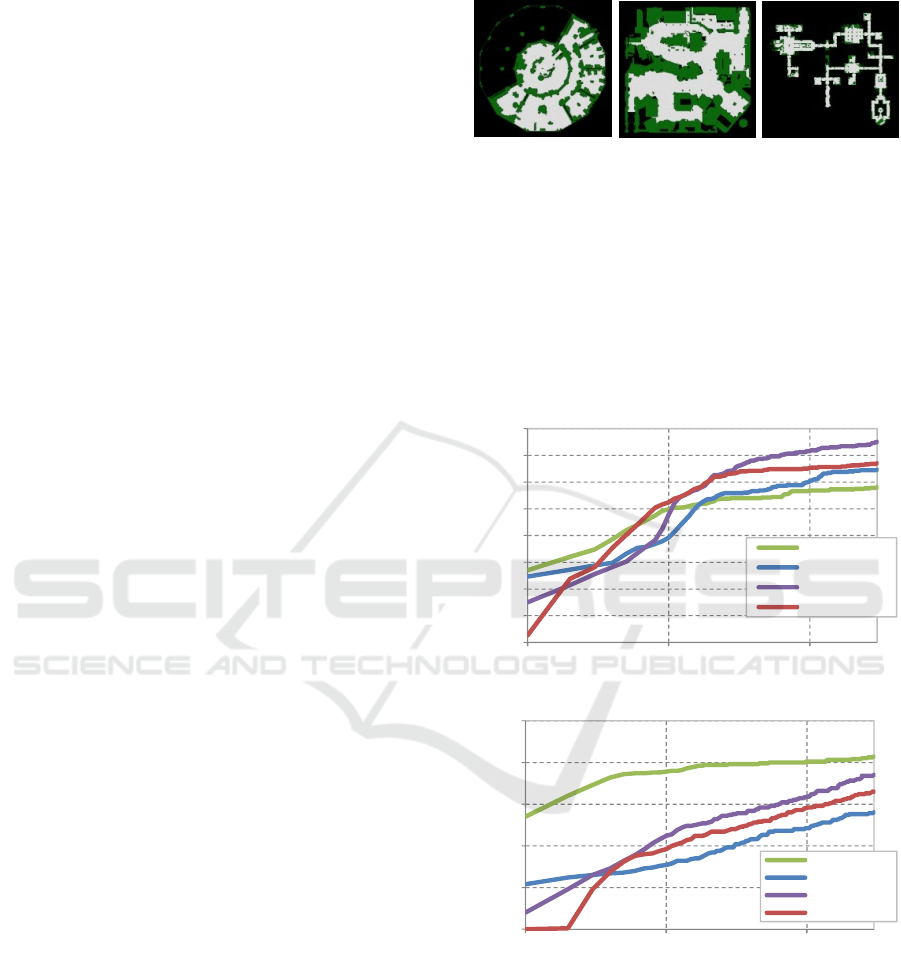
Figure 5: Illustration of large Dragon Age maps ost003d
(size 194194), den520d (size 257256), and brc202d
(size 481530).
For each distance 10 random instances were gen-
erated in which initial positions were selected ran-
domly and then random walk has been performed un-
til all the agents reach at least the given distance from
its initial position.
Figure 6: Results of experiments on Dragon Age map
ost003d. MDD-SAT+ID outperforms MDD-SAT in
harder instances but both are dominated by ICTS.
The hypothesis for large maps is that MDD-
SAT+ID should dominate generally which in fact is
the same hypothesis as in the case of small grids be-
cause here we have only the low-medium density
case. However, as there are important structural dif-
ferences between the three tested maps which impact
0
50
100
150
200
250
300
350
400
110100
Numberofinstances
Runtime(seconds)
Solvedinstances
Ost003d|16agents
ICTS
ICBS
MDD‐SAT+ID
MDD‐SAT
0
50
100
150
200
250
110100
Numberofinstances
Runtime(seconds)
Ost003d|32agents
ICTS
ICBS
MDD‐SAT+ID
MDD‐SAT
ost003d den520d
brc202d
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
92
is hardly predictable. Intuitively, ID should have been
more beneficial in ost003d and den520d maps
since in these maps there is more room to find alter-
native paths.
Results for the three Dragon Age maps are
shown in figures 6, 7, and 8. Again the number of in-
stances solved in the given runtime is shown. The dif-
ficulty (runtime) grows with the growing distance of
agents from their goals in this setup.
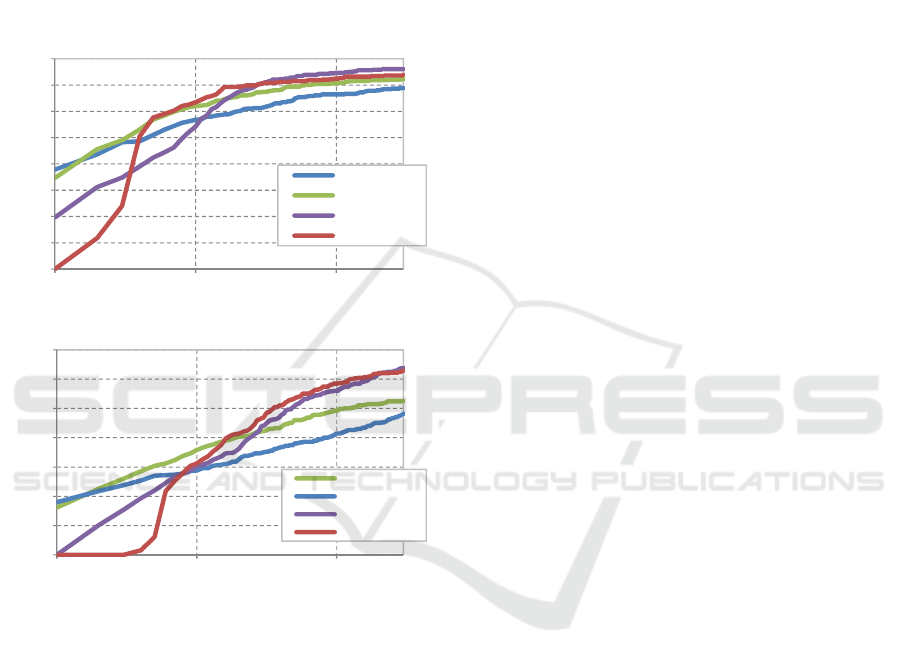
Figure 7: Results of experiments on Dragon Age map
den520d. ID brings minor benefit in harder instances.
It can be read from these results that MDD-
SAT+ID tends to outperform MDD-SAT in more dif-
ficult instances. In these instances, the interaction
among agents in non-trivial but on the other hand the
interdependence among agents is tractable by ID.
The intuitive hypothesis was not confirmed com-
pletely since surprisingly MDD-SAT is better than
MDD-SAT+ID in easier instances of medium density
category usually. Our initial intuitive hypothesis did
not count with the fact that merging groups represents
a big overhead in case of large maps. Hence, MDD-
SAT+ID can show its benefit after the difficult of the
formula modeling the entire instance prevails over the
difficulty of group merging.
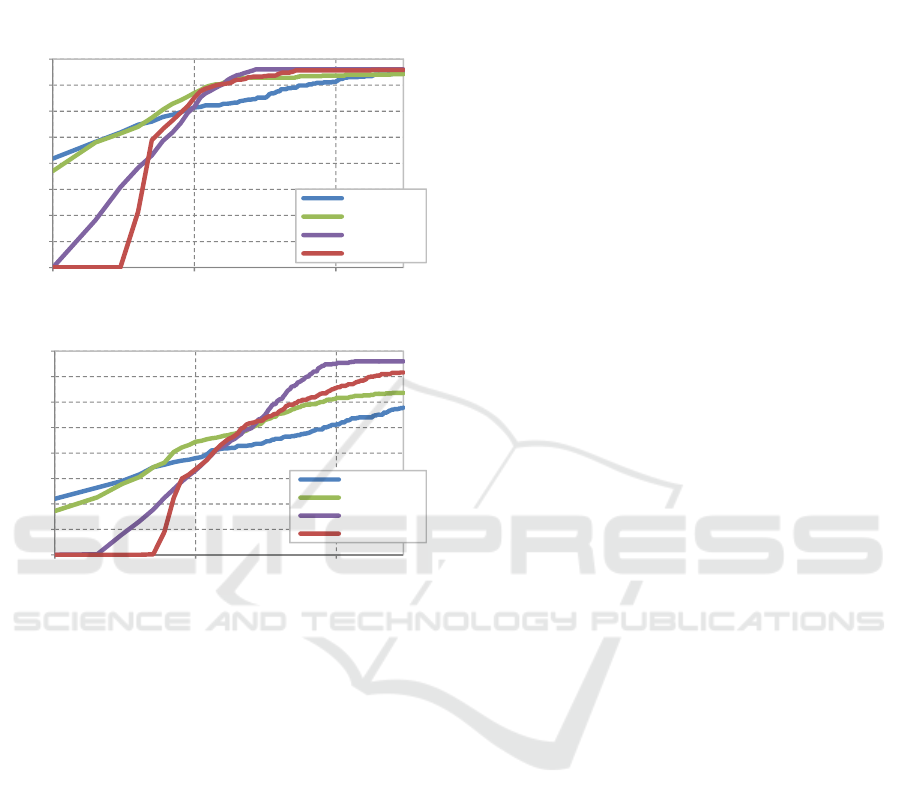
A surprising result was obtained in
brc202d map
where MDD-SAT+ID was a very clear winner in
harder instances with 32 agents.
Moreover, we cannot say that SAT-based ap-
proach represented by MDD-SAT and MDD-
SAT+ID is a universal winner as there are cases
where ICTS and ICBS dominate (ost003d with 32
agents is such an example).
7 DISCUSSION
It can be generally observed that ID brings worth-
while improvement to MDD-SAT solver which by it-
self performs very well.
Experimental results indicate that there is a certain
range of the density of agents though not precisely
determined in our evaluation in which ID is beneficial
while outside this range it cases an overhead.
The implementation of ID within the MDD-
SAT+ID solver did not use any special reasoning
about what groups of agents should be merged or not.
The groups were processed in the ordering given by
the original ordering of agents. We expect that more
careful reasoning about merging can bring yet more
improvements.
8 CONCLUSIONS
We described how to integrate existing technique of
independence detection (ID) developed originally for
search-based MAPF solver into the SAT-based ap-
proach to MAPF.
Experimental results confirm significant benefit
of using ID within the SAT-based approach to opti-
mal MAPF solving. The benefit is especially evident
in instances with medium density of agents where in-
teractions among agents are non-trivial but there exist
group of agents that are independent of each other.
The suggested MDD-SAT+ID solver which is the
result of integration of ID into an existing SAT-based
MAPF solver MDD-SAT became a new state-of-the-
art in optimal SAT-based MAPF solving. Moreover,
the new MDD-SAT+ID performs well with respect to
best search based solvers ICTS and ICBS though we
cannot say there is a universal winner.
There are important future research directions
which we just touched in this work. First, the per-
formed experimental evaluation indicates the need to
develop concepts for more precise classification of
density and interaction among agents. Such a classi-
0
50
100
150
200
250
300
350
400
110100
Numberofinstances
Runtime(seconds)
Solvedinstances
Den520d|16agents
ICBS
ICTS
MDD‐SAT+ID
MDD‐SAT
0
50
100
150
200
250
300
350
110100
Numberofinstances
Runtime(seconds)
Den520d|32agents
ICTS
ICBS
MDD‐SAT+ID
MDD‐SAT
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver
93
fication should ultimately lead to determining auto-
matically in which cases ID would be beneficial and
in which cases not.
Figure 8: Results of experiments on Dragon Age map
brc202d. ID brings significant improvement in harder in-
stances with 32 agents.
The second future direction would become very
apparent after a close look at the implementation.
Currently we take groups of agents to be merged in
the same order as they appear in the input. A more
informed consideration which groups of agents
should be merged may bring further reduction of the
size of groups of agents.
ACKNOWLEDGEMENTS
This paper is supported by a project commissioned by
the New Energy and Industrial Technology Develop-
ment Organization Japan (NEDO), joint grant of the
Israel Ministry of Science and the Czech Ministry of
Education Youth and Sports number 8G15027, and
Charles University under the SVV project number
260 333.
We would like thank anonymous reviewers for
their constructive comments.
REFERENCES
Audemard, G., Simon, L., 2013. The Glucose SAT Solver.
http://labri.fr/perso/lsimon/glucose/, 2013, [accessed in
October 2016].
Audemard, G., Simon, L., 2009. Predicting Learnt Clauses
Quality in Modern SAT Solvers. Proceedings of the
21st International Joint Conference on Artificial Intel-
ligence (IJCAI 2009), pp. 399-404, IJCAI.
Balint, A., Belov, A., Heule, M., Järvisalo, M., 2015. SAT
2015 competition. http://www.satcompetition.org/,
2015, [accessed in October 2016].
Berg, J. van den, Snoeyink, J., Lin, M. C., Manocha, D.,
2010. Centralized path planning for multiple robots:
Optimal decoupling into sequential plans. Proceedings
of Robotics: Science and Systems V, University of
Washington, 2009, The MIT Press.
Biere, A., Heule, M., van Maaren, H., Walsh, T., 2009.
Handbook of Satisfiability. IOS Press.
Boyarski, E., Felner, A., Stern, R., Sharon, G., Tolpin, D.,
Betzalel, O., Shimony, S.: ICBS: Improved Conflict-
Based Search Algorithm for Multi-Agent Pathfinding.
Proceedings of the 24th International Joint Conference
on Artificial Intelligence (IJCAI 2015), pp. 740-746,
IJCAI.
Čáp, M., Novák, P., Vokřínek, J., Pěchouček, M., 2013.
Multi-agent RRT: sampling-based coop-erative path-
finding. International conference on Autonomous
Agents and Multi-Agent Systems (AAMAS 2013), pp.
1263-1264, IFAAMAS.
Erdem, E., Kisa, D. G., Öztok, U., Schüller, P., 2013. A
General Formal Framework for Pathfinding Problems
with Multiple Agents. Proceedings of the 27th AAAI
Conference on Artificial Intelligence (AAAI 2013),
AAAI Press.
Huang, R., Chen, Y., Zhang, W., 2010. A Novel Transition
Based Encoding Scheme for Planning as Satisfiability.
Proceedings of the 24th AAAI Conference on Artificial
Intelligence (AAAI 2010), AAAI Press.
Kautz, H., Selman, B., 1999. Unifying SAT-based and
Graph-based Planning. Proceedings of the 16th Interna-
tional Joint Conference on Artificial Intelligence
(IJCAI 1999), pp. 318-325, Morgan Kaufmann.
Kim, D., Hirayama, K., Park, G.-K, 2014. Collision Avoid-
ance in Multiple-Ship Situations by Distributed Local
Search. Journal of Advanced Computational Intelli-
gence and Intelligent Informatics (JACIII), Volume
18(5), pp. 839-848, Fujipress.
Kornhauser, D., Miller, G. L., Spirakis, P. G, 1984. Coor-
dinating Pebble Motion on Graphs, the Diameter of Per-
mutation Groups, and Applications. Proceedings of the
25th Annual Symposium on Foundations of Computer
Science (FOCS 1984), pp. 241-250, IEEE Press.
Ma, H., Koenig, S., Ayanian, N., Cohen, L., Hoenig W.,
Kumar, T.K.S., Uras, T., Xu. H., Tovey, C., Sharon, G.,
2016. Overview: Generalizations of Multi-Agent Path
Finding to Real-World Scenarios. IJCAI-16 Workshop
on Multi-Agent Path Finding (WOMPF).
0
50
100
150
200
250
300
350
400
110100
Numberofinstances
Runtime(seconds)
Solvedinstances
Brc202d|16agents
ICBS
ICTS
MDD‐SAT+ID
MDD‐SAT
0
50
100
150
200
250
300
350
400
110100
Numberofinstances
Runtime(seconds)
Brc202d|32agents
ICBS
ICTS
MDD‐SAT+ID
MDD‐SAT
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
94

Michael, N., Fink, J., Kumar, V., 2011. Cooperative manip-
ulation and transportation with aerial robots. Autono-
mous Robots, Volume 30(1), pp. 73-86, Springer.
Ratner, D. and Warmuth, M. K., 1990. NxN Puzzle and Re-
lated Relocation Problems. Journal of Symbolic Com-
putation, Volume 10 (2), pp. 111-138, Elsevier.
Ryan, M. R. K., 2008. Exploiting Subgraph Structure in
Multi-Robot Path Planning. Journal of Artificial Intel-
ligence Research (JAIR), Volume 31, 2008, pp. 497-
542, AAAI Press.
Ryan, M. R. K., 2010. Constraint-based multi-robot path
planning. Proceedings of the IEEE International Con-
ference on Robotics and Automation (ICRA 2010), pp.
922-928, IEEE Press.
Sharon, G., Stern, R., Goldenberg, M., Felner, A., 2013.
The increasing cost tree search for optimal multi-agent
pathfinding. Artificial Intelligence, Volume 195, pp.
470-495, Elsevier.
Sharon, G., Stern, R., Felner, A., Sturtevant, N. R., 2015.
Conflict-based search for optimal multi-agent pathfind-
ing. Artificial Intelligence, 219, 40-66, Elsevier.
Silver, D., 2005. Cooperative Pathfinding. Proceedings of
the 1st Artificial Intelligence and Interactive Digital
Entertainment Conference (AIIDE 2005), pp. 117-122,
AAAI Press.
Standley, T., 2010. Finding Optimal Solutions to Coopera-
tive Pathfinding Problems. Proceedings of the 24th
AAAI Conference on Artificial Intelligence (AAAI-
2010), pp. 173-178, AAAI Press.
Standley, T., Korf, R. E., 2011. Complete Algorithms for
Cooperative Pathfinding Problems. Proceedings of the
22nd International Joint Conference on Artificial Intel-
ligence (IJCAI 2011), pp. 668-673, IJCAI.
Sturtevant, N. R., 2012. Benchmarks for Grid-Based Path-
finding. IEEE Transactions on Computational Intelli-
gence and AI in Games, Volume 4(2), pp. 144-148,
IEEE Press.
Surynek, P., 2009. A Novel Approach to Path Planning for
Multiple Robots in Biconnected Graphs. Proceedings of
the 2009 IEEE International Conference on Robotics
and Automation (ICRA 2009), pp. 3613-3619, IEEE
Press.
Surynek, P., 2010. An Optimization Variant of Multi-Robot
Path Planning is Intractable. Proceedings of the 24th
AAAI Conference on Artificial Intelligence (AAAI
2010), pp. 1261-1263, AAAI Press.
Surynek, P., 2014. Compact Representations of Coopera-
tive Path-Finding as SAT Based on Matchings in Bipar-
tite Graphs. Proceedings of the 26th IEEE International
Conference on Tools with Artificial Intelligence (ICTAI
2014), pp. 875-882, IEEE Computer Society.
Surynek, P., Felner, A., Stern, R., Boyarski, E., 2016. Effi-
cient SAT Approach to Multi-Agent Path Finding Un-
der the Sum of Costs Objective. Proceedings of 22nd
European Conference on Artificial Intelligence (ECAI
2016), pp. 810-818, IOS Press.
Yu, J., LaValle, S. M., 2013a. Structure and intractability
of optimal multirobot path planning on graphs. Pro-
ceedings of the 27th AAAI Conference on Artificial In-
telligence (AAAI 2013), AAAI Press.
Yu, J., LaValle, S. M., 2013b. Planning optimal paths for
multiple robots on graphs. Proceedings of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA 2013), pp. 3612-3617, IEEE Press.
Wang, K. C., Botea, A., 2008. Fast and memory-efficient
multi-agent pathfinding, Proceedings of the 18th Inter-
national Conference on Automated Planning and
Scheduling (ICAPS 2008), pp. 380-387, AAAI Press.
de Wilde, B., ter Mors, A., Witteveen, C.: Push and Rotate:
a Complete Multi-robot Pathfinding Algorithm. Jour-
nal of Artificial Intelligence Research (JAIR), Volume
51, pp. 443-492, AAAI Press, 2014.
Wilson, R. M., 1974. Graph Puzzles, Homotopy, and the
Alternating Group. Journal of Combinatorial Theory,
Ser. B 16, pp. 86-96, Elsevier.
Integration of Independence Detection into SAT-based Optimal Multi-Agent Path Finding - A Novel SAT-based Optimal MAPF Solver
95
