
Generative Animation in a Physics Engine using Motion Captures
Brian Wilke and Sudhanshu K. Semwal
Department of Computer Science, University of Colorado, Colorado Springs, CO, 80918, U.S.A.
Keywords:
Articulated Motion, Motion Capture, Novel Application, Asymmetric Scaling, Under Controlling.
Abstract:
Motion captures are an industry standard for producing high-quality, realistic animations. However, generat-
ing novel animations from motion captures remains a complex, non-trivial problem. Many techniques have
been developed, including kinematics and manually solving the equations of motion. We present a new tech-
nique using a physics engine to generate novel animations. Motion captures are effectively simulated within
a popular open-source physics engine, Bullet, and two generative techniques are applied. These generative
techniques – asymmetric scaling and under-controlling – are shown to be simple and straight-forward. The
techniques and methods were implemented in Python and C++, and show new promising avenues for genera-
tive animation using existing motion captures.
1 INTRODUCTION
Motion capture has become an industry standard for
producing high-quality, realistic animations in film
and games (Schreiner and Gleicher, 2002; Calvert
et al., 2002; Multon, 1999; Boulic et al., 1990; Hod-
gins, 1996; Macchietto et al., 2009; Ryan, 1990), and
pivotal papers describing a general purpose rigid body
collision and contact simulator (Baraff, 1989; Baraff,
1991). However, once motion capture data is sam-
pled, it is difficult to adjust and re-target. A common
example of this distortion is footskate, where the char-
acter’s feet move when they really should be planted
(Schreiner and Gleicher, 2002). Furthermore, what if
the director wants the right arm above the head in-
stead of on the waist, and the left leg bent instead of
straight? A new motion capture must almost certainly
be taken, since adjusting the original capture would
be too time-consuming, expensive, and possibly un-
realistic.
1.1 Generating Novel Animations with
Motion Captures
Adjusting motion captures has been a continuing field
of study, especially since captures have inherent ob-
stacles to overcome, e.g., footskate. A main ques-
tion has been whether a capture or set of captures can
be used to generate novel animations. For instance,
given a particular walking capture, can we adapt it to
a different skeleton walking at a different speed?
This particular type of generative animation is
called walking motion synthesis. There have been
three main previous research directions in this area,
presented in (Multon, 1999): kinematics, solving the
equations of motion, and interpolation.
Kinematics is the geometry of motion. This ap-
proach specifies key joint angles that determine the
rest of the model’s configuration. This method can
generate various synthesizers, as in (Boulic et al.,
1990). However, as in all kinematics, it can require
massaging from the animator to provide physical re-
alism and avoid mechanical movements.
Solving the equations of motion attempts to find
the correct forces and torques to apply to reach a cer-
tain position. (Hodgins, 1996) models humans run-
ning physically and directly computes the forces and
torques required for running (Hodgins, 1996). Con-
trollers have to be implemented to avoid impossible
joint configurations. In (Macchietto et al., 2009), a
real-time simulation system automatically balances
a standing character, deriving the mechanics of bal-
ance from linear and angular momentum. Interpo-
lation edits motion capture data between given mo-
tions. (Ashraf and Wong, 2000) interpolate walking
and running motions and generate a new motion be-
tween four given motions (Ashraf and Wong, 2000).
(Rose et al., 1998) use multivariate interpolation on
classified motion, generating a new animation by ap-
plying polynomial and radial basis function interpo-
lation between B-Spline coefficients under the classi-
fication (Rose et al., 1998). Extrapolation is not pos-
250
Wilke B. and Semwal S.
Generative Animation in a Physics Engine using Motion Captures.
DOI: 10.5220/0006134702500257
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 250-257
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
sible with these techniques, and the parameters can
be quite difficult to properly set. PCA has also been
introduced into animation synthesis. (Glardon et al.,
2004) use principal component analysis (PCA) to cre-
ate a walking engine based on motion captures (Glar-
don et al., 2004). This engine computes the walking
cycle for different skeleton sizes at different speeds.
Controlling Independent Rigid Bodies. Let the
rigid body for joint j be r
b
( j). At each frame
f , a joint’s rigid body r
b
( j) has a linear velocity
v(r
b
( j), f ) computed by the physics engine. This ve-
locity is computed given the forces acting on r
b
( j),
e.g., gravity. Our target linear velocity from the mo-
tion capture for joint j in the next frame f + 1 is
v( j, f + 1). The error term between our current and
target velocities is then
e
v
( j, f ) = v( j, f + 1) − v(r
b
( j), f ), (1)
where j is the joint, f is the frame, v( j, f + 1) is
our calculated linear velocity in the next frame, and
v(r
b
( j), f ) is the physics engine’s computed linear ve-
locity on the rigid body r
b
( j) in f . This error term
allows us to control the rigid body r
b
( j)’s linear ve-
locity in the presence of other forces.
A proportional control loops uses only a propor-
tional term for the next output, that is, P
out
= K
p
e(t),
where P
out
is the loop’s output at time t, e(t) is the sys-
tem’s error at t, and K
p
is the proportionality constant.
Using this kind of control loop, between frames f and
f + 1, we apply a central force to each rigid body
F( j, f ) = K
f
· m(r
b
( j)) · e
v
( j, f ), (2)
where j is the joint, r
b
( j) is the rigid body corre-
sponding to j, m(r
b
( j)) is r
b
( j)’s mass > 0, K
f
is
an appropriately chosen constant, and e
v
( j, f ) is from
Equation (1). This equation incorporates all forces
acting on the body and applies a force that will cor-
rect its motion to our target motion from the motion
capture.
Having developed simple controllers for indepen-
dent rigid bodies, we can consider the problem of cre-
ating a physical skeleton. The motion capture joint
hierarchy specifies the parents and children of each
joint. Typically, it is a rooted tree where each joint
has one unique parent. We will assume that is the
case, such that H : J → G where G is a tree and ∃ j ∈ J
such that j is the root of G.
Asymmetric Scaling and Under-controlling. Now
that we have a physics engine that replicates the orig-
inal motion capture’s motion, we can consider gener-
ating novel animations using this data. Here, we will
consider two types of generative animation: asym-
metric scaling and under-controlling. These tech-
niques can exist on their own or combine together to
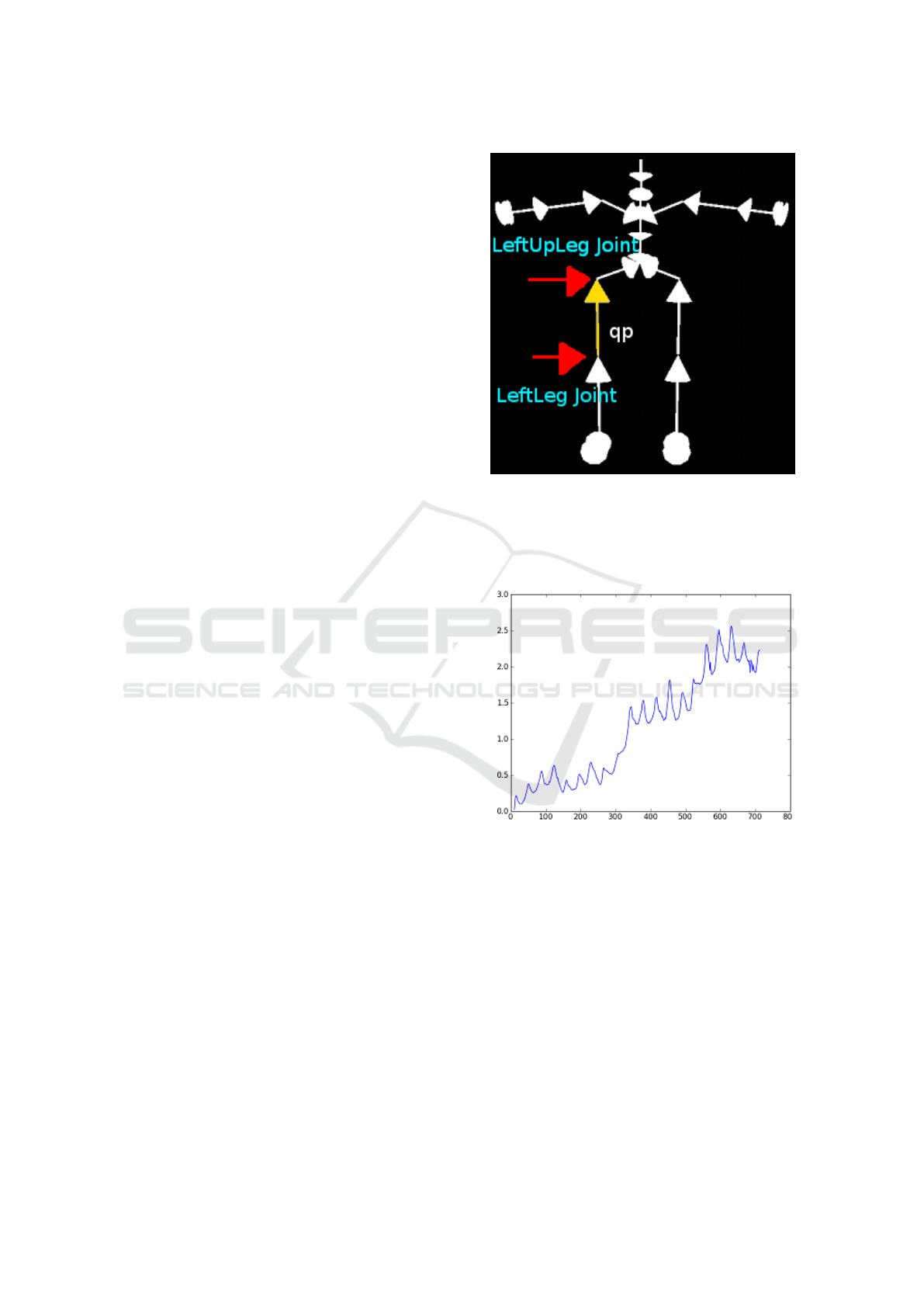
Figure 1: The various q
p
( j) vectors between joints and par-
ent joints in a motion capture hierarchy H. The LeftUpLeg
joint and LeftLeg joint are marked in the picture, and the
q
p
(LeftLeg) vector between them is highlighted. In this
particular hierarchy, the LeftUpLeg joint is a parent of the
LeftLeg joint.
Figure 2: This graph plots e
2
ρ
( j, f ) for j = Hips against the
frame numbers. Though there is some oscillation, the er-
rors appear to accumulate over time, causing a left-to-right
upwards slope in the graph.
generate new animations. Asymmetric scaling sim-
ulates what would happen to the original motion if,
e.g., part of the body became stronger. For instance,
consider a motion capture of a boxer shadow box-
ing. The boxer wants to increase the power of his
punches. With asymmetric scaling, we can simulate
what would happen to his shadow boxing if he in-
creased his biceps muscle mass, or his shoulder mus-
cle mass, or his abdominal muscle mass, etc. By in-
cluding a proportional term,
v
K
( j, f ) = K
v
( j, f ) · v( j, f ), (3)
Generative Animation in a Physics Engine using Motion Captures
251

Figure 3: Simulated animation stills of 141 02.bvh using
independent rigid bodies, a physical skeleton, and a con-
strained physical skeleton, respectively from top to bottom,
using the tuned parameters.
5
Figure 4: A still from the simulation of 141 30.bvh using
physical skeletons after many steps. The error has accu-
mulated enough that joints that should remain locked are
drifting away from each other.
Figure 5: A still from the simulation of 141 30.bvh using
constrained physical skeletons after many steps. The ani-
mation looks much better because the joints remain locked
together.
we simulate a change in joint velocity, where v( j, f )
is joint j’s linear velocity in frame f . This velocity
scaling also simulates what would happen if, e.g., a
tennis player swung her racket harder or softer, or a
cyclist pedalled harder or softer during a climb. That
is, this approach can simulate a velocity change that is
within a person’s reach given their current physicality.
A tennis player could utilize this technique to deter-
mine optimal swinging speed for a given ball, where
the velocity change transferred to the racket changes
the trajectory of the ball. The ball’s trajectory change
could also be physically simulated in our physics en-
gine.
1.2 Under-controlling
In our previous techniques, we exactly specified a
controller on every rigid body in the physical skele-
ton. With a physical skeleton operating under con-
straints, this exact specification is not required. Rigid
body constraints determine how two rigid bodies can
transform with respect to each other. As mentioned
earlier, the shoulder is a type of ball and socket joint
that limits translation away or towards the humerus
and the shoulder blade, but allows rotation. This ball
and socket constraint is also known as a point-to-point
constraint. In general, 3d macroscopic rigid bodies
have 6 degrees of freedom (DoF): translation along
any axis, and rotation about any axis. A point-to-
point constraint is a specialization where the transla-
tions are locked, i.e., there are only the 3 rotational de-
grees of freedom. A generic 6 DoF constraint can be
created which limits or does not limit any particular
DoF. Applying these constraints to each pair of rigid
bodies in our physical skeleton allows us to under-
control the skeleton. The physics engine will update
each rigid body’s position based on our control loop
and the rigid body’s constraints. For instance, we
could control only the right side of the body, which
would create a zombie-like effect where the left side is
limply carried along. Our joints – the location where
bones connect – have very well-defined constraints.
In fact, dislocations occur when we violate these con-
straints. We have already touched upon the shoulder’s
constraint, but other major constraints include the el-
bow, the wrist, and the knee. For instance, as part
of the elbow, the radius and ulna (the bones of the
forearm) can rotate around the two axes perpendicu-
lar to the elbow, but not by more than the proximal
semicircle defined by the axis of the humerus, and the
humerus, radius, and ulna cannot translate with re-
spect to each other. Most joints in the human body do
not allow translations, but allow rotations. By spec-
ifying these constraints, we can free ourselves from
controlling every rigid body.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
252

2 ALGORITHM DEVELOPMENT
AND IMPLEMENTATION
The code developed for this paper uses a mix of
Python and C++, and utilizes the Bullet physics en-
gine (Coumans, 2012). Only the BVH motion capture
file format is supported, though other formats such as
ASF/AMC could be added in the future as necessary.
The intent is to work with the large CMU Graphics
Lab Motion Capture Database and compare the orig-
inal motion captures to the generated physics anima-
tion (Calvert et al., 2003; Club, 2013). Even though
the CMU Database uses the ASF/AMC format origi-
nally, their captures have been exported to the BVH
format, and BVH is more compatible with certain
tools that sped development, such as ply, an imple-
mentation of lex and yacc in Python (Beazley, 2011;
OpenGL, 2013; SciPy, 2013; Evans, 2011). There is
no appreciable difference between the BVH files we
use here and the original ASF/AMC files, except for
the first frame which includes a T-pose of the cap-
ture’s hierarchy.
Five motion captures from the CMU motion cap-
ture database were replicated physically and had gen-
erative techniques applied.
Replicating the Motion Physically and Positional
Error. Our controllers depend on two variables: the
numerical differentiation technique and the propor-
tionality constant. We evaluated central differences
with various orders, ∇(n), where n is the order and
1 ≡ n mod 2. With each order, we also tuned the pro-
portionality constant K
f
to minimize positional error
across all joints. Because we also scale our model in
our simulation, there is a second tuning constant, K
vc
,
which scales our velocities symmetrically. That is,
v
0
( j, f ) = K
vc
v( j, f ),
for all joints j in all frames f , where v( j, f ) is joint
j’s linear velocity in frame f .
Our goal is to search for a central difference ∇(n)
and a pair (K
f
,K
vc
) that minimizes differences be-
tween the original motion capture and the simulation.
For a joint j in frame f , its positional error vector is
e
ρ
( j, f ) = r( j, f ) − ρ
ρ
ρ(r
b
( j), f ),
where ρ
ρ
ρ(r
b
( j), f ) is the position of the rigid body
r
b
( j) that corresponds to joint j in frame f , and
r( j, f ) is j’s position in the motion capture in frame
f . In an independent rigid body, ρ
ρ
ρ is the rigid body’s
center of mass, whereas for a physical skeleton, it is
at one end of the capsule shape we use for r
b
( j). The
squared error is
e
2
ρ
( j, f ) = e
ρ
( j, f ) · e
ρ
( j, f ),
which is just the dot product of e
ρ
with itself. Aver-
aging across all frames, we get
¯e
2
ρ
( j) =
1
| f |
∑
f
e
2
ρ
( j, f ),
where | f | is the number of frames. Finally, averaging
across all joints, we achieve an error number for each
pair (K
f
,K
vc
) and central difference ∇(n)
¯e
2
ρ
(K
f
,K
vc
,∇(n)) =
1
|J|
∑
j∈J
¯e
2
ρ
( j). (4)
Minimizing Equation (4) gives us tuned parame-
ters that closely match the simulation to the original
motion capture.
Search Algorithm. There are many algorithms we
could use to search for the parameters (K
f
,K
vc
,∇(n))
that minimize Equation (4). One rather simplistic ap-
proach is to generate random triples of numbers, cal-
culate Equation (4) for each triple, and compare. This
kind of search is known as a Monte Carlo search, and
is very applicable when the domain of the triples is
limited and it is difficult to obtain or apply a deter-
ministic method that optimizes these parameters. In-
deed, formulating a deterministic method appears ex-
tremely difficult, since, not only do we apply forces
and torques to each rigid body, but Bullet too applies
the force of gravity and constraint forces to each rigid
body in each frame. We therefore used a modified
Monte Carlo search. We limited our central differ-
ences to orders 3 ≤ n ≤ 19. For certain (K
f
,K
vc
),
the rigid bodies can literally fly apart in the simu-
lation, so we seed the search initially with a known
good pair, (K
g
f
,K
g
vc
). Algorithm 1 details the search
method, where random[−1, 1] is a function that pro-
duces a random real number, i.e., a floating point
number, between -1 and 1 inclusive. It can easily be
seen that this algorithm runs in O(points · maxOrder ·
F(mocap-file)), where F is the number of frames in
mocap-file.
We found that a good starting point for indepen-
dent rigid bodies was (K
g
f
,K
g
vc
) = (100, 75), and for
physical skeletons was (K
g
F
,K
g
vc
) = (20,100). These
parameters produced a simulation that at least some-
what matched all of the captures. We then tuned to
a single motion capture, 141 15.bvh. This capture is
by far the longest of our 5, and demonstrates many
interactions between joints by going through ranges
of motion. From there, we used 100 points per run,
each run taking about 14 minutes on a laptop, and a
maximum order of 19. We then used the best tun-
ing parameters from each run to seed the good values
of the subsequent run. A concern with this particular
method is that runs will not converge upon a better
solution. However, we found that, starting with the
Generative Animation in a Physics Engine using Motion Captures
253

Table 1: Tuned parameters for independent rigid bodies and physical skeletons.
Rigid Body n K
f
K
vc
¯e
2
ρ
σ
2
ρ
points Runs
Independent Rigid
Bodies
5 98.5331 85.46 0.511 0.561 100 5
Physical Skeleton 5 32.5875 86.419 0.874 0.660 100 9
Constrained Physical
Skeleton
3 24.1933 120.798 1.472 0.999 100 10
Algorithm 1: Tuning parameters with a Monte Carlo search.
function TUNE-PARAMETERS(K
g
f
,K
g
vc
, points,
maxOrder, mocap-file)
K
f
← K
g
f
K
vc
← K
g
vc
∇ ← {}
for i = 3 → maxOrder,1 ≡ i mod 2 do
∇ ← {central-difference(i,r)}
end for
K
f ,b
← K
f
,K
vc,b
← K
vc
,∇
b
← ∇(3)
¯e
2
ρ
← ∞
for i = 1 → points do
for ∇(n) ∈ ∇ do
¯es
2
ρ
= run simulation of mocap-file with
(K
f
,K
vc
)
if ¯es
2
ρ
< ¯e
2
ρ
then
¯e
2
ρ
= ¯es
2
ρ
K
f ,b
← K
f
,K
vc,b
← K
vc
,∇
b
← ∇(n)
end if
K
f
← K
f
+random[−1,1]
K
vc
← K
v
c+random[−1,1]
end for
end for
return ¯e
2
ρ
,K
f ,b
,K
vc,b
,∇
b
end function
good points, we achieved convergent results with
a small number of runs. The tuning results for
141 15.bvh are listed in Table 1. These results show
that we can minimize the error between our simula-
tion and a motion capture simply and effectively. To
speed calculations of averages, and avoid errors such
as massive cancellation, we used an algorithm due to
Knuth and Welford (Knuth, 1998). This algorithm
can calculate an average and standard deviation in one
pass of the data. We use it during our simulation. In
Algorithm 2, we present our use of the method for the
positional errors of each joint. The same algorithm is
used to aggregate the joint positional errors into our
overall average error.
As with any controller, the parameters in Table
1 may work great for a specific instance, but break-
down for another. These results are repeatable, simu-
lation after simulation. Longer captures accumulated
greater error, as shown in Figure 2.
Algorithm 2: Online average calculation.
∀ j ∈ J, ¯e
2
ρ
( j) ← 0, n( j) ← 0,M
2
( j) ← 0
for j ∈ J at each step s, f of the simulation do
n( j) ← n( j) + 1
∆ ← e
2
ρ
( j, f )− ¯e
2
ρ
( j)
¯e
2
ρ
( j) ← ¯e
2
ρ
j +
∆
n( j)
M
2
( j) ← ∆( ¯e
2
ρ
( j, f )− ¯e
2
ρ
( j)
end for
σ
2
ρ
( j) = M
2
( j)/(n( j) − 1)
Animations using the Tuned Parameters. In Fig-
ure 3, we present animation stills from within a single
simulation. Each type of rigid bodies was simulated
on a single file, 141 02.bvh. The camera remained
at the same place as the independent rigid bodies, the
physical skeleton, and the constrained physical skele-
ton were simulated in turn.
Figure 4 shows the physical skeleton after it has
turned around and is walking back towards its orig-
inal position in the simulation of motion capture file
141 30.bvh. Figure 5 shows the constrained physical
skeleton at the same point in 141 30.bvh. The dis-
connections in Figure 4 are gone from 5 because of
the Bullet constraints placed on the joints. Coupled
with the tuned parameters, constraints offer a pow-
erful animation enhancement. To demonstrate our
two generative animation techniques, we used our five
motion capture files. For instance, 141 14.bvh cap-
tures punching and kicking, which is a good candi-
date to show how scaling, e.g., the left foot, changes
the kicks, and 141 30.bvh captures a random walk,
which is a good candidate for showing how under-
controlling can produce, e.g., a zombie-like anima-
tion. All of our generative animations used a con-
strained physical skeleton.
2.1 Asymmetric Scaling
By scaling K
v
( j, f ), we found that we could make the
kicks of 141 14.bvh harder or softer easily. For in-
stance, by scaling the right foot by
K
v
(RightFoot,200 ≤ f ≤ 600) = 1.2,
we simulated a harder snap between the right knee
and foot, as compared in Figure 6.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
254

Table 2: Comparison of errors using 141 15.bvh tuned parameters with other captures.
File Rigid Body ¯e
2
ρ
σ
2
ρ
141 02.bvh Independent Rigid Bodies 3.431 0.194
141 02.bvh Physical Skeleton 3.262 0.174
141 02.bvh Constrained Physical Skeleton 0.669 0.022
141 08.bvh Independent Rigid Bodies 2.992 0.023
141 08.bvh Physical Skeleton 2.389 0.020
141 08.bvh Constrained Physical Skeleton 0.237 0.007
141 14.bvh Independent Rigid Bodies 0.121 0.0005
141 14.bvh Physical Skeleton 0.234 0.012
141 14.bvh Constrained Physical Skeleton 0.395 0.042
141 30.bvh Independent Rigid Bodies 4.612 0.029
141 30.bvh Physical Skeleton 3.220 0.071
141 30.bvh Constrained Physical Skeleton 0.893 0.164
Figure 6: Stills from simulations of 141 14.bvh comparing
the original, un-scaled simulation on the left to a simulation
using asymmetrical scaling on the RightFoot on the right.
Figure 7: Stills from simulations of 141 15.bvh using the
asymmetrical scaling from Table 4.
In the original simulation, at the height of the kick,
the right leg stays below ground-parallel, the left leg
is bent, the left hip is more ground-parallel, the left
elbow is bent into the body, and the spine is bent only
slightly towards the left side of the body. In the scaled
simulation, at the height of the kick, the right leg is
ground-parallel or more, with the knee actually bent
past 90 degrees, the left leg is less bent, the left hip is
less ground-parallel, the left elbow is bent more away
from the body, and the spine is bent more towards the
left side of the body. Just by applying an asymmet-
ric scale to the RightFoot, we substantially changed
the resultant forces and torques on the entire leg, the
Spine, the LeftHand, even the Head! If a kickboxer
kicks 1.2 times harder with his feet, this simulation
shows what happens to his entire body.
We also applied asymmetric scaling on
141
15.bvh using multiple different scales dur-
ing the entire simulation. The different scales are
listed in Table 4. The resulting animation shows what
would happen if the left side of the body became
significantly stronger than the right side, and is quite
Figure 8: A still from the simulation of 141 30.bvh using
an under-controlled constrained physical skeleton where the
left hand and left foot are not controlled. The hand and foot
lift up because of their constraints with their parent bodies
and joints.
comical. Figure 7 shows stills from a simulation of
141 15.bvh using the scales in Table 4 where the left
arm actually goes under the left leg.
While comical, this generation also demonstrates
how someone recovering from a serious injury will
be impacted. For instance, a person who does injure
their right leg severely and must keep off of it will ex-
perience decreased muscle mass in the right leg, and
potentially increased muscle mass in their left leg to
compensate. This imbalance will lead to very unex-
pected results as the person begins using their right
leg again, as demonstrated here.
2.2 Under-controlling: Zombies
Furthermore, a gimp leg does not rotate at the knee.
So, instead of a point to point constraint, we used
a generic 6 DoF constraint locked in all axes at the
knee and hand. We also changed the mass of the three
bodies in the chain between the foot and the hip and
the hand and the shoulder. We found that the foot
mass should be lower than the leg mass, and the hand
mass should be lower than the arm mass, to produce
Generative Animation in a Physics Engine using Motion Captures
255

Table 3: Comparison of the forces on certain joints of an
un-scaled and scaled 141 14.bvh simulation. The scaling is
solely applied to the RightFoot.
Joint j
¯
F
2
(r
1
b
( j),r
2
b
( j))
¯
τ
2
(r
1
b
( j),r
2
b
( j))
RightFoot 15.196 23.643
RightLeg 4.458 1.640
RightUpLeg 1.618 2.548
Spine 0.148 0.554
LeftFoot 0.0987 0.0949
LeftLeg 0.084 0.143
LeftUpLeg 0.307 1.043
LeftHand 0.009 0.145
LeftForeArm 0.002 0.002
LeftArm 0.008 0.002
Head 0.010 0.008
Table 4: The asymmetric scales used to simulate
141 15.bvh. Values for joints are given.
Joint j K
v
LeftFoot 1.1
RightFoot 0.9
LeftHand 1.5
RightHand 0.5
All other joints 1.0
the desired animation. These bodies are less massive
on the human body, and, zombies being anatomically
human, this result is most expected. Masses for Left-
Foot, LeftLeg, LHipJoint, LeftHand, LeftFOreArm,
and LeftArm are: 5, 10, 20. .25, 2.0, and 5 respec-
tively. All other joints are 1 units.
3 CONCLUSIONS AND FUTURE
WORK
Using Python, C++, and the Bullet Physics library, a
motion capture to linear velocity transformer was im-
plemented. This transformer relied on two techniques
with three parameters: numerical differentiation us-
ing central differences with one parameter, the order,
and proportional controllers with two parameters, the
actual proportionality constant for the controller and
a symmetric scaling constant. We also showed how,
using this transformer, we could achieve two gener-
ative animation techniques: asymmetric scaling and
under-controlling. The results showed that replicat-
ing the original motion capture in a physics engine
is feasible, though the proportional controllers tend
to accumulate errors over time. Tuning the param-
eters to a single capture was fairly simple using a
Monte Carlo method, and these parameters worked
well across other captures. Physical skeletons tended
Figure 9: Stills from a simulation of 141 02.bvh using a
zombie physical skeleton. We can see that the left leg’s knee
does not bend at all.
Figure 10: Stills from a simulation of 141 08.bvh using a
zombie physical skeleton. The motion capture actor steps
up onto a platform and then down. The platform is not
shown here. We can see that the skeleton looks awkward
stepping down from its left leg onto its right, since the left
leg is locked and does not bend at the knee.
Figure 11: Stills from a simulation of 141 30.bvh using a
zombie physical skeleton. We can see that the left side of
the body is limp corresponding to a shuffling zombie.
to produce defects at the parent joint of a rigid body
over time. Constrained physical skeletons compen-
sated for these defects and created good-looking an-
imations. We found that generating new animations
in the physics simulations achieved intriguing results.
Asymmetrical scaling can be achieved simply; chang-
ing only one joint slightly in a few frames caused no-
ticeable and interesting changes in the simulation. We
also showed how under-controlling could achieve a
zombie-like effect by under-controlling certain rigid
bodies on the left-side of a constrained physical skele-
ton. By recreating motion captures in a physics en-
gine, we hoped to overcome previous dynamics gen-
eration limitations. Possible uses of this work include
sports medicine, athletic training, and model anima-
tion, especially for video games.
REFERENCES
Ashraf, G. and Wong, K. C. (2000). Dynamic time warp
based framespace interpolation for motion editing. In
Proceedings of the Graphics Interface 2000 Confer-
ence, May 15-17, pages 45–52.
Baraff, D. (1989). Analytical methods for dynamic simu-
lation of non-penetrating rigid bodies. In Computer
Graphics. Vol. 23, Number 3, July 1989, pp. 223-232.
Baraff, D. (1991). Coping with friction for non-penetrating
rigid body simulation. In Computer Grpahics. Vol. 25,
Number 4, August 1991, pp. 31-40.
Beazley, D. M. (2011). Ply python lex-yacc. Web Accessed.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
256

Boulic, R., Magnenat Thalmann, N., and Thalmann, D.
(1990). A global human walking model with real-time
kinematic personification. In The visual computer.
Vol. 6, No. 6, 1990, pp. 344-358.
Calvert, T., Chapman, J., and Patla, A. (2002). Aspects
of the kinematic simulation of human movement. In
IEEE Computer Graphics and Applications. Vol 2, No
9, pp. 41-50, 1982.
Calvert, T., Chapman, J., and Patla, A. (CMU 2003).
Carnegie mellon university motion capture database.
In Web Accessed. 9 July 2013.
Club, T. M. C. (July 2013). Web accessed.
Coumans, E. (2012). Bullet 2-80 physics sdk manual. In I.
Web Accessed 9 July 2013.
Evans, C. (2011). Yaml. In Web Accessed. Web Accessed.
Glardon, P., Boulic, R., and Thalmann, D. (2004). Pca-
based walking engines using motion capture datat. In
IComputer Graphics International. Computer Graph-
ics International.
Hodgins, J. (1996). Three-dimensional human runningt. In
Robotics and Automation, 1996. Proceedings., 1996
IEEE International Conference on. Vol 4,.
Knuth, D. E. (1998). The art of computer programming. In
IEEE Computer Graphics and Applications. p 232 3rd
Edition, Addison Wesley, Boston.
Macchietto, A., Zordan, V., and Shelton, C. (2009). Mo-
mentum control for balance. In IACM Transactions
on Graphics. Vol. 28, No. 3, ACM, 2009.
Multon, F. (1999). Computer animation of human walking:
a survey. In The journal of visualization and computer
animation. Vol. 10, No. 1, 1999, pp. 39-54.
OpenGL (2013). The python opengl binding. Web Ac-
cessed.
Rose, C., Cohen, M., and Bodenheime, B. (1998). Verbs
and adverbs: Multidimensional motion interpolation.
In IEEE Computer Graphics and Applications Vol. 18
No. 5, pages 32–40.
Ryan, R. (1990). Multibody systems handbook. In
IADAMS – Multibody System Analysis Software.
Springer Berlin Heidelberg, 1990, pp. 361-402.
Schreiner, L. K. J. and Gleicher, M. (2002). Footskate
cleanup for motion capture editing. In ACM SIG-
GRAPH/Eurographics symposium on Computer ani-
mation. ACM.
SciPy (July 2013). scipy.misc.derivative. In SciPy v0 12
Reference Guide (DRAFT). Web Accessed.
Generative Animation in a Physics Engine using Motion Captures
257
