
Robust System for Partially Occluded People Detection in RGB Images
Marcos Baptista-R
´
ıos, Marta Marr
´
on-Romera, Cristina Losada-Guti
´
errez, Jos
´
e Angel Cruz-Lozano
and Antonio del Abril
Department of Electronics, University of Alcal
´
a, Campus Universitario s/n, Alcal
´
a de Henares, Spain
marcos.baptista@depeca.uah.es, {marta.marron, cristina.losada}@uah.es
Keywords:
People Detector, Partial Occlusion, Histogram of Oriented Gradients (HOG), Support Vector Machine (SVM).
Abstract:
This work presents a robust system for people detection in RGB images. The proposal increases the robustness
of previous approaches against partial occlusions, and it is based on a bank of individual detectors whose
results are combined using a multimodal association algorithm. Each individual detector is trained for a
different body part (full body, half top, half bottom, half left and half right body parts). It consists of two
elements: a feature extractor that obtains a Histogram of Oriented Gradients (HOG) descriptor, and a Support
Vector Machine (SVM) for classification. Several experimental tests have been carried out in order to validate
the proposal, using INRIA and CAVIAR datasets, that have been widely used by the scientific community.
The obtained results show that the association of all the body part detections presents a better accuracy that
any of the parts individually. Regarding the body parts, the best results have been obtained for the full body
and half top body.
1 INTRODUCTION
In recent decades, topics such as the analysis of
video sequences and image interpretation have be-
come increasingly important because of its potential
applications (Poppe, 2010) as security, video surveil-
lance (Reid et al., 2013; Arroyo et al., 2015), smart
spaces or oriented marketing. More specifically, the
detection of people for recognition of their activi-
ties (Mart
´
ınez et al., 2016) is a topic that arouses
a great interest in the scientific community. Within
this context, in this paper we present a work that
implements a robust solution for people detection in
RGB video sequences, specifically focused on video-
surveillance scenarios. This proposal has been vali-
dated using the well known CAVIAR (cav, 2005) and
INRIA (Weinland et al., 2006) datasets, and the main
results are shown in this paper.
There are several works in the literature whose
aim is the robust detection of people in RGB im-
ages. The main works can be divided into three
groups depending on the features used in order to ex-
tract information from the images. The first group
includes the alternatives based on segmentation (Gu
et al., 2009). These works use a prior knowledge of
the background in order to separate it from the fore-
ground corresponding to people that have to be de-
tected. These proposals are not robust against light-
ing changes, dynamic backgrounds or camera move-
ments. On the other hand, there are detectors based on
the Implicit Shape Model (ISM) (Leibe et al., 2005;
Seemann et al., 2005; Wohlhart et al., 2012), but these
alternatives only work properly in high resolution im-
ages. Finally, there are several works based on a
sliding window approach, that obtain a feature vector
for a local region (window) that moves along the im-
age. The extracted features are classified using a pre-
viously trained classifier (Papageorgiou and Poggio,
2000; Viola and Jones, 2004), in order to determinate
if they correspond to a person or not.
Within the sliding window detectors, the selection
of a suitable feature vector is essential in order to ob-
tain correct results. The features used in the state of
the art can be divided into different groups depend-
ing on the provided information. Thus, the main ap-
proaches are the ones based on Histograms of Ori-
ented Gradients (HOG) (Dalal and Triggs, 2005; Zhu
et al., 2006), shape features (Gavrila and Philomin,
1999; Gavrila, 2007), movement features (Viola et al.,
2005), and features based on joints and human body
parts. Among these features, the ones that show
a better performance for people detection are the
HOG (Dalal and Triggs, 2005). However, many of
them only work properly if there are not partial oc-
clusions of people to be detected. The proposal in this
paper avoids this problem, improving the robustness
of the people detector against partial occlusions.
In the last years, they have been published several
532
Baptista-Rà os M., Marrøsn-Romera M., Losada-GutiÃl’rrez C., Angel Cruz-Lozano J. and del Abril A.
Robust System for Partially Occluded People Detection in RGB Images.
DOI: 10.5220/0006165005320539
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2017), pages 532-539
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

approaches that are able to cope with partial occlu-
sions for objects (Wohlhart et al., 2012; Bera, 2015)
or people detection (Wu and Nevatia, 2005; Shu et al.,
2012; Li et al., 2014; Chan et al., 2015) and track-
ing (Wu and Nevatia, 2006; Shu et al., 2012). These
approaches are all based on parts detection using dif-
ferent alternatives, such as AdaBoost detectors (Wu
and Nevatia, 2005), AdaBoost combined with HOG
features (Li et al., 2014) or Implicit Shape Mod-
els (Wohlhart et al., 2012).
Additionally, and in order to complete the intro-
duction of this work, it has to be pointed out that
in the field of computer vision it is common to use
a public dataset in order to quantitatively compare
the obtained results within the different ones reached
by the scientific community proposals. In this con-
text, there are several datasets that are widely used
for people detection and activity recognition, such as
KTH (kth, 2011; Schuldt et al., 2004), Muhavi (Singh
et al., 2010) or MSR (msr, ; Wang et al., 2012), all of
them described in (Chaaraoui et al., 2012). As men-
tioned before, the proposal hereby presented is vali-
dated using the well known CAVIAR (cav, 2005) and
INRIA (Weinland et al., 2006).
The rest of the paper is organized as follows: Sec-
tion 2 presents the proposal for robust people detec-
tion; detailed experimental results are presented in
Section 3; and finally Section 4 describes the main
conclusions achieved.
2 ROBUST PEOPLE DETECTION
The aim of this stage is determining if there are people
in the image. If so, the detector provides both the
position and size in the image plane for each detected
person. Two steps are included in the people detection
proposal in order to accomplish the partial occlusion’s
robustness pursuit, both of which are described in the
following sections.
2.1 Basic Detector
As it has been explained in the introduction, there
are several approaches for people detection, being the
most widely used those based on a sliding window
and HOG descriptors (Dalal and Triggs, 2005).
The proposal in this work, also uses HOG descrip-
tors (which have demonstrated if efficacy for people
detection) and a sliding window based detector, but it
has been modified in order to increase its robustness
against partial occlusions. In order to do that, the pro-
posal is composed by five different part detectors for
the full body, as well as for the half top, half bottom,
half left and half right parts or the body, as shown in
Figure 1. Any of these detectors have the classical
structure for a detector, including two different mod-
ules: the feature extraction and the classification.
Figure 1: Full body and body parts considered in the detec-
tion stage.
The first stage of each part detector is the feature
extraction. In this stage, the HOG descriptors are ob-
tained for a given input image. This is carried out us-
ing different sizes for the sliding window, depending
on their aspect ratio (related to the full body window
size: 64 ×128 pixels). Moreover, HOG descriptors
are obtained for 64 different scales of the input im-
age, in order to detect people with different sizes in
the scene.
• Full body descriptor: obtained with a 64 ×128
pixels window, 16 ×16 pixels blocks, and 8 ×8
pixels cells.
• Half top body descriptor: obtained with a 64 ×64
pixels window, 16 ×16 pixels blocks, and 8 ×8
pixels cells.
• Half bottom body descriptor: obtained with a 64×
64 pixels window, 16×16 pixels blocks, and 8×8
pixels cells.
• Half left body descriptor: obtained with a 32 ×
128 pixels window, 16×16 pixels blocks, and 8 ×
8 pixels cells.
• Half right body descriptor: obtained with a 32 ×
128 pixels window, 16×16 pixels blocks, and 8 ×
8 pixels cells.
Then, a different binary Support Vector Machine
(SVM) classifier is trained for each body part, using
images from INRIA dataset (Weinland et al., 2006),
which includes a set of 64x128 pixels images, each of
them presenting a properly centered person. These
images have been cropped in order to have only a
body part instead of a full person. An example of the
cropped images used for training is shown in Figure 2.
Regarding the SVM parameters, they have been
adjusted experimentally, using k-fold cross valida-
tion. Moreover, different kernels have been consid-
Robust System for Partially Occluded People Detection in RGB Images
533
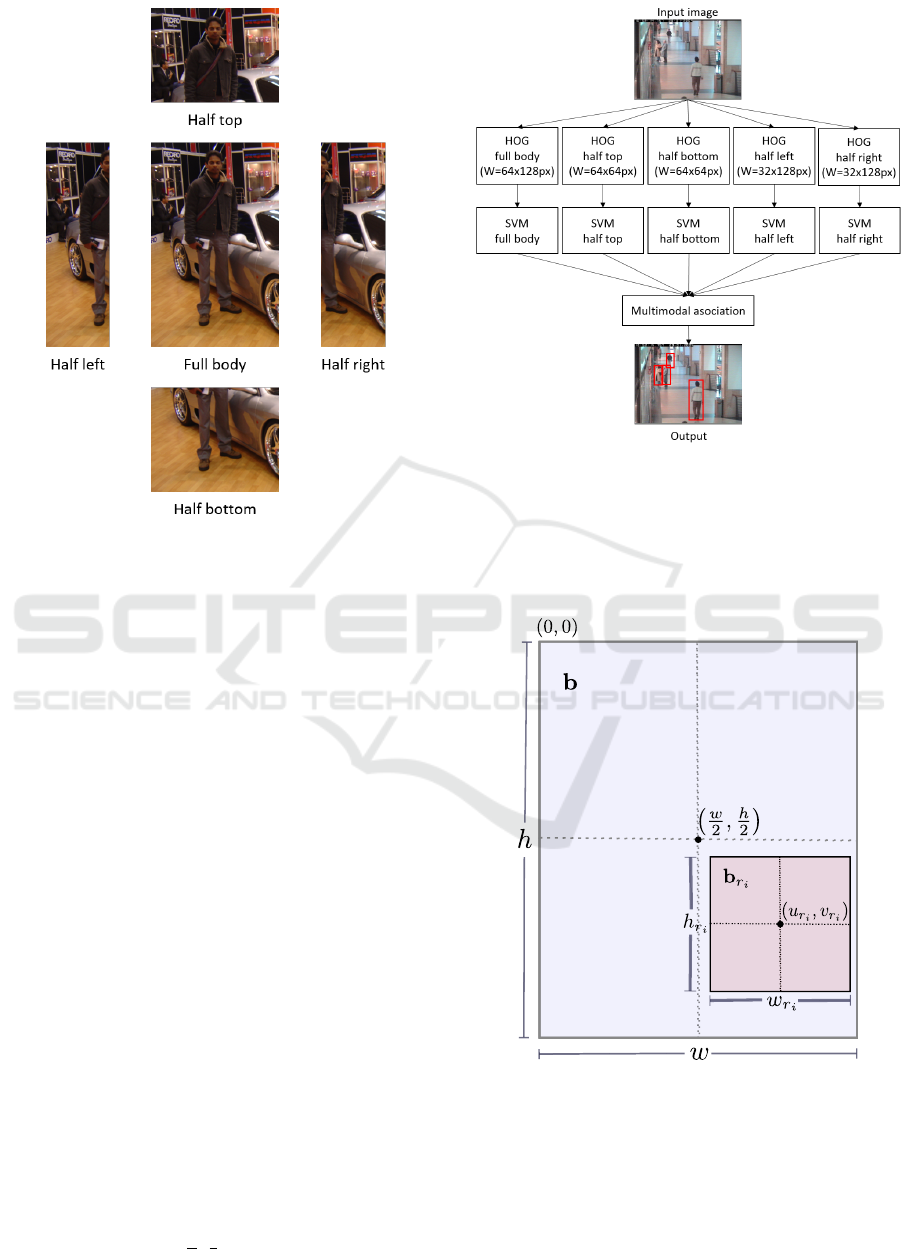
Figure 2: Example of cropped images used for the training
of each body part SVM.
ered: lineal, polynomial and Radial Basis Function
(RBF), obtaining results for all of them that are pre-
sented and analysed in detail in Section 3.
Once the trained has been performed, the ex-
tracted features are classified using the corresponding
SVM. So, each of the SVM provides, for each de-
tected person, its position and size (width and height)
in the image, as well as the distance of the detec-
tion to the classification hyperplane, which is there-
fore related to the reliability of the detection. These
detections are then associated using a multimodal ap-
proach, that is explained in Section 2.2. A general
block diagram of the proposal, including all the ex-
plained stages is shown in Figure 3.
2.2 Multimodal Detector
The term multimodal is used to qualify a particular
type of the global people detector architecture pro-
posed, based on the detection of different parts of the
same person. Thus, the multimodal detector groups
the detections of different parts, in order to increase
the robustness in detecting partially occluded persons.
To describe the multimodal detector proposed,
the following definitions have to be taken into ac-
count: a set of m detection sub-windows in the image
B
r
= {b
r
i
}
m−1
i=0
= {(u
r
i
, v
r
i
, w
r
i
, h
r
i
)}
m−1
i=0
related to the
general window b = (
w
2
,
h
2
, w, h), including all men-
Figure 3: General block diagram of the proposal.
tioned sub-windows i.e. b
r
i
⊆ b,∀b
r
i
∈ B
r
, where
b
∗
= (u
∗
, v
∗
, w
∗
, h
∗
) referees the size of the window
w
∗
×h
∗
centered in the image point (u
∗
, v
∗
), as graph-
ically described in Figure 4.
Figure 4: Geometrical relation of the i sub-window and the
general window in the multimodal detection proposal, and
definition of its most important terms.
Each of the k partial detections performed
d
i k
= (u
k
, v
k
, f
k
: b
r
i
) is thus related to the i classifier,
and the b
r
i
region. In order to perform the grouping
process that allows the multimodal detection, a nor-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
534

malised version d
n
i k
, of each d
i k
partial detection, is
obtained through equation (1).
d
n
i k
= (u
nk
, v
nk
, f
nk
: b) (1)
where
u
nk
= u
k
+
1
f
k
w
2
−u
r
i
v
nk
= v
k
+
1
f
k
h
2
−v
r
i
f
nk
= f
k
(2)
The grouping process proposed to obtain the mul-
timodal associated people detector is incrementally
performed from all the i = 1, ..., m −1 partial detec-
tions in matrices D
n
i
= {d
n
i k
}
m
i
−1
k=0
in the correspond-
ing m B
r
sub-windows. Thus a new global multimodal
detections matrix D
n
is created, initially being just a
copy of the first partial detections one D
n
0
, and incre-
mentally including those elements from the next par-
tial detections matrix, with low similarity S(d
n
i k
, d
n
h
)
with all m
T
increasing number of elements already
in the multimodal detections matrix D
n
= {d
n
h
}
m
T
−1
h=0
,
and modifying those with high similarity, till the last
partial detection matrix D
n
m
is reached.
The association process mentioned is based on
the Hungarian Algorithm (Kuhn, 1955) and described
in 1, in which the similarity function S for every
d
n
i k
with k = 0...m
i
detection element with all D
n
=
{d
n
h
}
m
T
−1
h=0
, is also defined.
3 EXPERIMENTAL RESULTS
Once the global people detector proposed is detailed
presented, in this section a complete set of results and
its analysis is included, in order to determine the con-
tribution of the different parts of the proposal, i.e. par-
tial detectors and multimodal one and their behaviour
within different types of SVM classifiers.
First, the different kernels considered for the SVM
classifier have been evaluated using a set of test im-
ages belonging to INRIA dataset (Weinland et al.,
2006). 1 presents the precision (ACC) obtained using
the expression in equation 3 where T P is the num-
ber of true positives, FP is the number of false pos-
itives, T N is the number of true negatives and FN is
the number of false negatives.
ACC =
T P + T N
T P + T N + FP + FN
(3)
As it can be seen in table 1, the highest accuracy is
obtained using a RBF Kernel. However, the computa-
tional cost for this kernel increases notably. For linear
Table 1: Precision obtained for each body part detector,
and the multimodal one, using different kernels in the SVM
classifier, for the test set of INRIA images dataset.
ACC Linear Polynomial RBF
Full body 0.9978 0.9931 1.0000
Half top 0.9850 0.9858 0.9980
Half bottom 0.9781 0.9772 1.0000
Half left 0.9844 0.9858 1.0000
Half right 0.9854 0.9850 1.0000
Multimodal 0.9982 0.9951 0.9988
and polynomial Kernels, the multimodal detector has
the highest accuracy. Regarding the body parts detec-
tors, the full body and half top body detectors present
a better performance than the other body parts. Once
the different alternatives have been analysed, the lin-
ear kernel is selected because of its balance between
the accuracy and the computational cost.
The F
1
score, defined in equation 4 has also been
computed, and the obtained results are shown in ta-
ble 2. This metric gives information about both, the
precision and recall of the classification algorithm,
and as in the previous case, the body part detectors for
full and half top body are the ones that present a bet-
ter performance. Regarding the multimodal detector
(associating information from all partial detectors) it
shows a F
1
score similar to the full body detector one.
F
1
=
2T P
2T P + FN + FP
(4)
Table 2: F
1
score obtained for each body part detector, and
the multimodal one, using different kernels in the SVM
classifier, for the test set of INRIA dataset images.
F1 Linear Polynomial RBF
Full body 0.9726 0.9755 0.9767
Half top 0.9382 0.9499 0.9534
Half bottom 0.8800 0.9176 0.9212
Half left 0.9178 0.9489 0.9462
Half right 0.9258 0.9468 0.9500
Multimodal 0.9686 0.9825 0.9644
The error rates of the algorithm have also been
analysed bay using DET (Detection Error Trade-off)
graphs, where the x-axis represents the False Accep-
tance Rate (FAR), and the y-axis represents the False
Rejection Rate (FRR) defined in equations 5 and 6.
FAR =
FP
T N + FP
(5)
FRR =
FN
T P + FN
(6)
As in the previous results, the DET graphs are
shown for each single detector, for the multimodal
Robust System for Partially Occluded People Detection in RGB Images
535

Input : All i = 1, ..., m −1 partial detections in matrices D
n
i
= {d
n
i k
}
m
i
−1
k=0
D
n
= D
n
0
for i=1:m // For all D
n
i
partial detections matrices
do
for k = 0 : m
i
// For every d
n
i k
detection in partial detection matrix
do
for h = 0 : m
T
// Compute S with all d
n
h
in D
n
multimodal detection matrix
do
S(d
n
i k
, d
n
h
) = e
−
"
u
nk
−u
nh
w
√
f
k
f
h
2
+
v
nk
−v
nh
h
√
f
k
f
h
2
+
f nk−f
nh
√
f
k
f
h
2
#
end
S(d
n
i k
) = argmax
h∈m
T
(S(d
n
i k
, d
n
h
)) //
if S(d
n
i k
) ≥ τ // Modify the similar partial detection d
i k
to be included in D
n
then
d
n
h
= d
n
associated k,h
=
u
nk
+u
nh
2
,
v
nk
+v
nh
2
,
√
f
nk
f
nh
T
end
else
d
n
h+1
= d
n
i k
// Include the dissimilar partial detection d
n
i k
in D
n
m
T
= m
T
+ 1
end
end
end
Output: Final multimodal detection matrix D
n
= {d
n
h
}
m
T
−1
h=0
Algorithm 1: Association algorithm for the multimodal detector.
10
−3
10
−2
10
−1
10
0
10
−3
10
−2
10
−1
10
0
FAR
FRR
Full body
Half top
Half bottom
Half right
Half left
Multimodal
Figure 5: DET graphs for each single body part detector and
the multimodal detector obtained for the lineal SVM.
detector and for each kernel: lineal (Figure 5), poly-
nomial (Figure 6) and RBF (Figure 7). As it was ex-
pected, for the lineal and polynomial SVM, the lowest
error rates are obtained for the full body detector and
the multimodal one, followed by the half top body
detector. On the other hand, the highest error rates
correspond to the half bottom body detector. Thus,
this results confirm that the full body and the half top
body detectors are the part detectors that provide the
highest precision.
Next, figure 8 shows the DET graph for the multi-
modal detector for the three kernels. In this figure, it
can be observed that for the multimodal detector, the
polynomial kernel is the one with the lowest error.
Finally, an example of the different stages of the
detection process is shown. The presented results
are obtained for an image belonging to CAVIAR
dataset (cav, 2005). First, Figure 9. Figure 10 shows
the detections for full body (left) and the top half body
(right) detectors. The detections are then grouped ob-
taining the results shown in fig 11. Finally, all the re-
sults are combined using the multimodal association
algorithm described in Section 2.2, in order to get the
final result shown in Figure 12.
4 CONCLUSIONS AND FUTURE
WORK
As stated in the introduction, the detection of peo-
ple in images and video sequences is still a challeng-
ing task in artificial vision. There are, furthermore,
numerous reasons for its scientific and technological
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
536

10
−3
10
−2
10
−1
10
0
10
−3
10
−2
10
−1
10
0
FAR
FRR
Full body
Half top
Half bottom
Half right
Half left
Multimodal
Figure 6: DET graphs for each single body part detector and
the multimodal detector obtained for the polynomial SVM.
10
−3
10
−2
10
−1
10
0
10
−3
10
−2
10
−1
10
0
FAR
FRR
Full body
Half top
Half bottom
Half right
Half left
Multimodal
Figure 7: DET graphs for each single body part detector and
the multimodal detector obtained for the RBF SVM.
interest, being the main one his big and day by day
increasing applicability. Among all the possible ap-
plications for this kind of technology it is in video
10
−3
10
−2
10
−1
10
0
10
−3
10
−2
10
−1
10
0
FAR
FRR
SV M Lineal
SV M Polynomial
SV M RBF
Figure 8: DET graphs for the multimodal detector for the
three SVM Kernels.
Figure 9: Input image belonging to CAVIAR dataset.
Figure 10: Example of detections obtained for the full body
(left) and the top half body (right) detectors.
Figure 11: Example of detections obtained for the full body
(left) and the top half body (right) detectors once grouped.
Robust System for Partially Occluded People Detection in RGB Images
537

Figure 12: Example of final result obtained after combining
the body part detectors.
surveillance where it presents a greater (mainly eco-
nomic) interest, and thus, this is the focus of the work
hereby presented.
In it, it has been evaluated the feasibility of an au-
tomatic people detection system with monocular im-
ages and without information about the background.
Besides, a pretty good set of results and analysis of
different and new techniques has been included.
This work also makes some important contribu-
tions that keep open some lines of research and devel-
opment related to improvements in people detection
systems. Within these, the following lines must be
pointed out to be taken in consideration as main con-
clusions of the paper:
• New multimodal detectors with basic HOG de-
scriptors. This proposal provides additional infor-
mation to basic detectors that allows a more robust
behaviour in complex situations.
• Mapping of reliability. In addition, this work has
presented a simple way to build reliability maps
of objects detection that have proven to improve
surveillance task.
On the other hand, as a future work already in
process, an improvement in the algorithm computa-
tional efficiency is needed to be applied to video-
surveillance applications, in order to make it run in
real time. With this focus in mind, the proposal pre-
sented can be easily computationally parallelized and
programmable on GPU.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish
Ministry of Economy and Competitiveness under
projects SPACES-UAH (TIN2013-47630-C2-1-
R) and HEIMDAL (TIN2016-75982-C2-1-R),
and by the University of Alcal
´
a under projects
SCALA (CCG2016/EXP-010), DETECTOR
(CCG2015/EXP-019) and ARMIS (CCG2015/EXP-
054).
REFERENCES
MSR - Action Recognition Datasets and Codes. http://
research.microsoft.com/en-us/um/people/zliu/
actionrecorsrc/. (Accesed July 2016).
(2005). EC Funded CAVIAR project/IST 2001 37540.
http://homepages.inf.ed.ac.uk/rbf/CAVIAR/. (Ac-
cesed July 2016).
(2011). KTH-Recognition of human actions . http://
www.nada.kth.se/cvap/actions/. (Accesed July 2016).
Arroyo, R., Yebes, J. J., Bergasa, L. M., Daza, I. G., and
Almazn, J. (2015). Expert video-surveillance sys-
tem for real-time detection of suspicious behaviors in
shopping malls. Expert Systems with Applications,
42(21):7991 – 8005.
Bera, S. (2015). Partially occluded object detection and
counting. In 2015 Third International Conference on
Computer, Communication, Control and Information
Technology (C3IT), pages 1–6.
Chaaraoui, A. A., Climent-P
´
erez, P., and Fl
´
orez-Revuelta,
F. (2012). A review on vision techniques applied
to human behaviour analysis for ambient-assisted liv-
ing. Expert Systems with Applications, 39(12):10873
– 10888.
Chan, K. C., Ayvaci, A., and Heisele, B. (2015). Partially
occluded object detection by finding the visible fea-
tures and parts. In 2015 IEEE International Confer-
ence on Image Processing (ICIP), pages 2130–2134.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, volume 1, pages 886–893.
Gavrila, D. M. (2007). A bayesian, exemplar-based ap-
proach to hierarchical shape matching. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
29(8):1408–1421.
Gavrila, D. M. and Philomin, V. (1999). Real-time object
detection for ”smart” vehicles. In The Proceedings of
the Seventh IEEE International Conference on Com-
puter Vision, 1999., volume 1, pages 87–93. IEEE.
Gu, C., Lim, J. J., Arbelaez, P., and Malik, J. (2009). Recog-
nition using regions. In CVPR, pages 1030–1037.
IEEE Computer Society.
Kuhn, H. W. (1955). The hungarian method for the assign-
ment problem. Naval Research Logistics Quarterly,
2:83–97.
Leibe, B., Seemann, E., and Schiele, B. (2005). Pedes-
trian detection in crowded scenes. In Proceedings
of the 2005 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR’05)
- Volume 1 - Volume 01, CVPR ’05, pages 878–885,
Washington, DC, USA. IEEE Computer Society.
Li, W., Ni, H., Wang, Y., Fu, B., Liu, P., and Wang, S.
(2014). Detection of partially occluded pedestrians by
an enhanced cascade detector. IET Intelligent Trans-
port Systems, 8(7):621–630.
Mart
´
ınez, C., Baptista, M., Losada, C., Marr
´
on, M., and
Boggian, V. (2016). Human action recognition in re-
alistic scenes based on action bank. In International
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
538

Work-conference on Bioinformatics and Biomedical
Engineering, pages 314–325, Granada.
Papageorgiou, C. and Poggio, T. (2000). A trainable system
for object detection. International Journal of Com-
puter Vision, 38(1):15–33.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image and Vision Computing, 28(6):976
– 990.
Reid, D., Samangooei, S., Chen, C., Nixon, M., and
Ross, A. (2013). Soft biometrics for surveillance: an
overview. Machine learning: theory and applications.
Elsevier, pages 327–352.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recognizing
human actions: A local svm approach. In Proceedings
of the Pattern Recognition, 17th International Confer-
ence on (ICPR’04) Volume 3 - Volume 03, ICPR ’04,
pages 32–36, Washington, DC, USA. IEEE Computer
Society.
Seemann, E., Leibe, B., Mikolajczyk, K., and Schiele, B.
(2005). An evaluation of local shape-based features
for pedestrian detection. In Proceedings of the British
Machine Vision Conference, pages 5.1–5.10. BMVA
Press. doi:10.5244/C.19.5.
Shu, G., Dehghan, A., Oreifej, O., Hand, E., and Shah,
M. (2012). Part-based multiple-person tracking with
partial occlusion handling. In 2012 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1815–1821. IEEE.
Singh, S., Velastin, S. A., and Ragheb, H. (2010). Muhavi:
A multicamera human action video dataset for the
evaluation of action recognition methods. In Ad-
vanced Video and Signal Based Surveillance (AVSS),
2010 Seventh IEEE International Conference on,
pages 48–55. IEEE.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57(2):137–154.
Viola, P., Jones, M. J., and Snow, D. (2005). Detecting
pedestrians using patterns of motion and appearance.
International Journal of Computer Vision, 63(2):153–
161.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012). Mining
actionlet ensemble for action recognition with depth
cameras. In 2012 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 1290–1297.
Weinland, D., Ronfard, R., and Boyer, E. (2006). Free
viewpoint action recognition using motion history vol-
umes. Computer Vision and Image Understanding,
104(2):249–257.
Wohlhart, P., Donoser, M., Roth, P. M., and Bischof, H.
(2012). Detecting partially occluded objects with an
implicit shape model random field. In Asian Confer-
ence on Computer Vision, pages 302–315. Springer.
Wu, B. and Nevatia, R. (2005). Detection of multi-
ple, partially occluded humans in a single image by
bayesian combination of edgelet part detectors. In
Tenth IEEE International Conference on Computer
Vision (ICCV’05) Volume 1, volume 1, pages 90–97.
IEEE.
Wu, B. and Nevatia, R. (2006). Tracking of multiple,
partially occluded humans based on static body part
detection. In 2006 IEEE Computer Society Confer-
ence on Computer Vision and Pattern Recognition
(CVPR’06), volume 1, pages 951–958. IEEE.
Zhu, Q., Yeh, M.-C., Cheng, K.-T., and Avidan, S. (2006).
Fast human detection using a cascade of histograms
of oriented gradients. In 2006 IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion (CVPR’06), volume 2, pages 1491–1498. IEEE.
Robust System for Partially Occluded People Detection in RGB Images
539
