
Evaluation of Hardware Oriented MRCoHOG
using Logic Simulation
Yuta Yamasaki
1
, Shiryu Ooe
1
, Akihiro Suzuki
1
, Kazuhiro Kuno
2
, Hideo Yamada
2
, Shuichi Enokida
3
and Hakaru Tamukoh
1
1
Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology, Kitakyushu, Fukuoka, Japan
2
EQUOS RESEARCH Co., Ltd, Tokyo, Japan
3
Faculty of Computer Science and Systems Engineering, Kyushu Institute of Technology, Iizuka, Fukuoka, Japan
yamasaki-yuta@edu.brain.kyutech.ac.jp, tamukoh@brain.kyutech.ac.jp
Keywords: MRCoHOG, Hardware Oriented Algorithm, Human Detection.
Abstract: Human detection require high speed and high accuracy processing. One of the high performance techniques
of the detection is multi-resolution co-occurrence histogram of oriented gradients (MRCoHOG). Since the
calculation of co-occurrence requires a huge amount of processing resources, it is difficult to realize real-time
human detection with MRCoHOG. Accordingly, hardware implementation is considered to be effective. In
this paper, a hardware oriented MRCoHOG is proposed. In the proposed method, we simplify complicated
calculation such as multiplications and square root operation for efficient hardware implementation.
Experimental results show that the proposed method achieves better human detection rate than the ordinary
method. Moreover, MRCoHOG is implemented in a digital circuit with the proposed method. According to
logic simulation of the proposed circuit, the processing speed of the hardware implementation is 466 times
higher than the software implementation.
1 INTRODUCTION
Human detection is a technique for cutting out a
human area from an input image, and has to process
the image at high speed and with high accuracy.
Human detection has two processes, a feature
extraction and a classification. Detection accuracy
depends on these performances. In this research, we
focus on the feature extraction processing and aim at
high speed processing by a dedicated hardware using
feature extraction method with high detection rate.
Human detection extracts common features of
human from many kinds of image data. From image
data of photograph, color information of each pixel is
obtained. However, human detection using color
information is very difficult, since the color of clothes
and background changes depending on the pictures.
Therefore, capturing the features of human is
effective in human detection. Luminance gradients
are forced on as feature. One of the luminance
gradient features is histogram of oriented gradients
(HOG) (Dalal and Triggs, 2005). HOG use gradient
distribution of local area. This feature is robust for
postural and illumination changes. Co-occurrence
histogram of oriented gradients (CoHOG)
(Watanabe, Ito and Yokoi, 2009) feature is an
improved feature of HOG. CoHOG feature uses co-
occurrence gradient direction of local area. This
feature is able to present more complicated shapes
than HOG features. In this study, we use multi-
resolution co-occurrence histogram of oriented
gradients (MRCoHOG) (Iwata and Enokida, 2014)
feature for human detection. MRCoHOG feature is
revised version of HOG and CoHOG features.
MRCoHOG has high precision in human detection.
However, the real-time human detection using
MRCoHOG and CoHOG is difficult because the
calculatoin of co-occurrence needs a great number of
processing resources. Therefore, hardware
implementation is required to realize real-time human
detection with MRCoHOG.
In this paper, a hardware oriented MRCoHOG is
proposed. In the proposed method, simple
calculations are employed instead of complex ones to
minimize circuit size. Based on the hardware oriented
algorithm, we design a digital circuit of MRCoHOG
described by Verilog Hardware Description
Lauguage. The designed circuit is evaluated by a
logic simulation and compared with a software
Yamasaki Y., Ooe S., Suzuki A., Kuno K., Yamada H., Enokida S. and Tamukoh H.
Evaluation of Hardware Oriented MRCoHOG using Logic Simulation.
DOI: 10.5220/0006165803410345
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 341-345
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
341

implementation at the point of processing speed. As a
result of comparison, the proposed circuit operates
466 times faster than the processing speed of software
implementation.
2 IMAGE FEATURES
In human detection tasks, classification accuracy
from images is the most important requirement. The
accuracy depends on effectiveness of image feature
extractors and accuracy of classification models,
since human detection process is divided into feature
extraction part and classification part.
In this paper, we focus on the image feature
extractor employing luminance gradient form local
region. The extractor of the detection should consider
about changes of poses and closes of human.
Therefore, the detection uses features from local
region which don’t be effected by body direction and
posture. For the human detection, it is quite difficult
to detect with collar information, so that most of the
methods employ luminosity and grasp shape with
feature based on luminance gradient.
2.1 HOG
HOG is gradient orientation based feature. In order to
extract HOG from an input image, firstly, gradient
directions at every pixels are calculated. Secondly,
histogram of each direction in a local area is
calculated. Finally, HOG feature is created by
concatenating the histograms of all local areas. Figure
1 shows histogram on HOG.
HOG has two advantages for human detection.
One is robustness against illumination variance since
gradient directions of local areas do not change with
illumination variance. Another one is robustness
against deformations which generate a small amount
of histogram value conversion.
2.2 CoHOG
CoHOG is an extended feature of HOG and has a
high-dimensional feature as shown in Fig. 2. This
feature uses a pair of gradient directions to make a
histogram. The combinations of neighbour gradient
directions can express shapes in detail. Via this idea,
CoHOG shows better performance than HOG at the
point of discrimination.
Figure 1: Histogram on HOG.
2.3 MRCoHOG
MRCoHOG feature uses multi-resolution images to
calculate gradient directions. MRCoHOG feature
makes two-dimensional histogram of co-occurrence
gradient directions as shown in Fig. 3. MRCoHOG is
to observe the combinations of the gradient directions
with different resolutions, thus features over larger
areas without changing filter sizes.
Figure 2: Two-dimensional histogram on CoHOG.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
342

Figure 3: Two-dimensional histogram on MRCoHOG.
3 PROPOSED METHOD
A hardware implementation of MRCoHOG realizes
high speed processing and low power consumption.
However, MRCoHOG consists of complex
calculations such as multiplication, square root and
arctangent. They require large circuit area. To
overcome the problem, we propose a hardware
oriented MRCoHOG algorithm with simple
calculations.
3.1 Gradient Magnitude
Gradient magnitude can be calculated by using
Euclidean distance (Eq. (1)). The method includes a
square root calculation and multiplications, therefore
inappropriate for hardware implementation. We
instead employ a hardware oriented technique
without neither a square root nor multiplications, the
Manhattan distance (Eq. (2)).
m
x,
y
,
,
(1)
m
x,
y
|
,
|
,
(2)
Here, Eqs. (3) and (4) represent the difference in
luminance between
,
,
,
where,
,
is the luminance at point
,
.
,
1,
1,
(3)
,
,1
,1
(4)
Table 1: Conditional branch of gradient direction.
Direction
,
,
|
,
|
-
,
0°- 45°
→
> 0
≧0
> 0
45°- 90°
↘
> 0
≧0 ≦0
90°- 135°
↓ ≦0
> 0 < 0
135°- 180°
↙ ≦0
> 0
≧0
180°- 225°
←
< 0
≦0
> 0
225°- 270°
↖
< 0
≦0 ≦0
270°- 315°
↑ ≧0
< 0 < 0
315°- 360°
↗ ≧0
< 0
≧0
Table 2: INRIA person dataset using human detection.
Training Image Test Image
Resolution
Positive 2416 Positive 1126 32x64
Negative 12288 Negative 4840 [pixels]
Figure 4: Image resize method.
tan
,
,
(5)
3.2 Gradient Direction
In the proposed method, arctangent is elected to earn
gradient direction. By conditional branch of eight
directions as shown in Table 1, it is eliminated to
calculate arctangent (Eq. (5)).
3.3 Image Resizing
For hardware oriented image resizing, we replace the
original bilinear interpolation with the nearest
neighbour interpolation. The nearest neighbour
interpolation can possibly simplify the resizing
process. Figure 4 shows resizing image.
Evaluation of Hardware Oriented MRCoHOG using Logic Simulation
343
4 EXPERIMENTAL RESULTS
4.1 Software Implementation
Performance of MRCoHOG is validated via software
implementation before hardware implementation of
it, since the hardware implementation demand more
number of processing than software implementation.
We compared results of the human detection rate
with the proposed method to the ordinary method.
The dataset used in these methods is INRIA Person
dataset (Dalal and Triggs, 2005). Table 2 shows
details of image dataset using training and test
images. MRCoHOG uses three different resolutions
(original, 1/2 and 1/4). The discriminator used in our
approach is Real AdaBoost (Shapire and Singer,
1999). We use 500 classifiers in Real AdaBoost. For
quantitative evaluation of detection rate, we use the
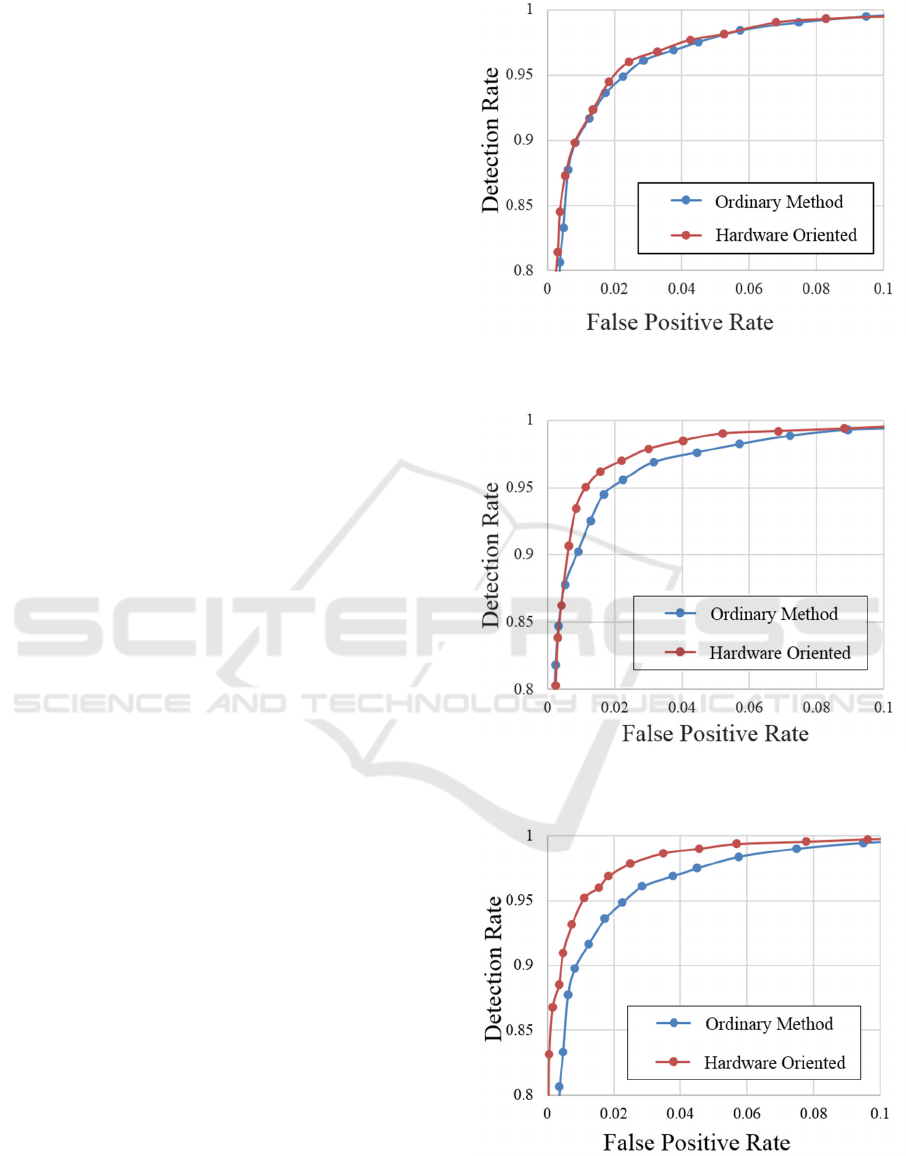
Receiver Operating Characteristic (ROC) curve.
Vertical axis shows detection rate, and horizontal axis
shows false positive rate in this ROC curve. When
two methods are compared with this ROC curve, the
method which curve passes more left and upper zone
of the figure than another one shows higher
performance than another one.
Figures 5, 6, and 7 show each of the results where
the ordinary method was compared with each of the
hardware oriented gradient magnitude, image resize,
and MRCoHOG where both of hardware oriented
gradient magnitude and image resize are integrated.
From Fig. 5, the proposed method performed as the
same quality as the original method. The proposed
resize method detected human with higher accuracy
than original one in Fig. 6, since edges of the images
after changing resolution were appeared clearly via
the nearest neighbour interpolation. Figure 7 shows a
comparison result of the proposed method combining
the gradient magnitude and resizing with the ordinary
MRCoHOG. From the result, the proposed hardware
oriented MRCoHOG realized high performance than
the ordinary MRCoHOG. In addition, from the view
point of hardware implementation, the proposed
method simplified the whole calculation process of
MRCoHOG.
Figure 5: Human detection using hardware oriented
gradient magnitude.
Figure 6: Human detection using hardware oriented
resizing.
Figure 7: Human detection using hardware oriented
MRCoHOG.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
344

4.2 Hardware Implementation
With software validation, the performance of the
proposed method was better than the ordinary method,
hence digital circuit was implemented with proposed
method.
The circuit is described by Verilog Hardware
Description Language, and Veritak Verilog simulator
is use for logic simulation to evaluate the circuit. In
the simulation, image data is assumed as an input data.
In the proposed circuit, there are five main
modules that contain several submodules. The entire
circuit is shown in Fig. 8. In these circuits, the size of
the input image data is changed to half and quarter
size. Every three size of the inputs are processed in
parallel.
The roles of each circuit is described in the list
below.
(a) Size (1/2, 1/4) Module: The resizing of the
input image
(b) 3 Line Buffer Module
(c) Calcurate Module: The calculation of
magnitude and direction
(d) Synchronize Module: The synchronization of
three inputs
(e) Histogram Module: The creation of two
dimensional histogram
In the simulation phase, the output of the proposed
design circuit could be regarded as a regular value as
MRCoHOG, therefore the circuit seem to be able to
calculate the value of MRCoHOG regularly.
Moreover, from the result of comparison between
logic simulation and software implementation, the
circuit can calculate MRCoHOG 466 times faster
than software implementation. Software processing
takes 11.42[s]. Hardware processing takes 24.49[ms].
Figure 8: Human detection using hardware oriented
gradient magnitude.
5 CONCLUSIONS
Since human detection need high accuracy and speed
method for image feature extraction, we proposed the
hardware oriented method based on MRCoHOG. In
the proposed hardware oriented MRCoHOG, we
replaced the complicated calculation such as
multiplications and square root operation by
simplified calculation for hardware implementation.
From experimental results of human detection, the
effectiveness of proposed method was clarified in the
detection rate. The result of hardware implementation
and its logic simulation, processing speed of the
proposed circuit was 466 times faster than the
software implementation. Future work will find out
appropriate discriminator such as neural networks
and Real Adaboost and will construct high accuracy
and high perception real time human detection
system.
REFERENCES
Dalal, N., Triggs, B., 2005. Histograms of Oriented
Gradients for Human Detection. Proc. of IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition, pp. 886-893.
Watanabe, T., Ito, S., Yokoi, K., 2009. Co-occurrence
Histograms of Oriented Gradients for Human
Detection. Proc. of Pacific-Rim Symposium on Image
and Video Technology, pp. 37-47.
Iwata, S., Enokida, S., 2014. Object Detection Based on
Multiresolution CoHOG. Proc. of 10th International
Symposium on Visual Computing, pp. 427-437.
Shapire, R., E., Singer, Y., 1999. Improved Boosting
Algorithms Using Confidence-rated Predictions.
Machine Learning, Vol. 37, No. 3, pp. 297-336.
Evaluation of Hardware Oriented MRCoHOG using Logic Simulation
345
