
Automatic Object Shape Completion from 3D Point Clouds for Object
Manipulation
Rui Figueiredo, Plinio Moreno and Alexandre Bernardino
Institute for Systems and Robotics (ISR/IST), LARSyS, Instituto Superior T
´
ecnico, Universidade de Lisboa, Lisboa, Portugal
{ruifigueiredo, plinio, alex}@isr.ist.utl.pt
Keywords:
Shape Completion, Symmetry, Part-based Object Representation, Semantic Parts.
Abstract:
3D object representations should be able to model the shape at different levels, considering both low-level
and high-level shape descriptions. In robotics applications, is difficult to compute the shape descriptors in
self-occluded point clouds while solving manipulation tasks. In this paper we propose an object completion
method that under some assumptions works well for a large set of kitchenware objects, based on Principal
Component Analysis (PCA). In addition, object manipulation in robotics must consider not only the shape but
the of actions that an agent may perform. Thus, shape-only descriptions are limited because do not consider
where the object is located with respect to others and the type of constraints associated to manipulation actions.
In this paper, we define a set of semantic parts (i.e. bounding boxes) that consider grasping constraints of
kitchenware objects, and how to segment the object into those parts. The semantic parts provide a general
representation across object categories, which allows to reduce the grasping hypotheses. Our algorithm is able
to find the semantic parts of kitchenware objects in and efficient way.
1 INTRODUCTION
Dealing with unknown objects is a strong research
topic in the field of robotics. In applications re-
lated with object grasping and manipulation, robots
aimed at working in daily environments have to inter-
act with many never-seen-before objects and increas-
ingly complex scenarios.
In this work we adopt a compact object represen-
tation, which is based on bounding box sizes and geo-
metrical moments as the main features. More specif-
ically, the proposed representation relies on object
dimensions along its main geometrical axes, which
can be extracted from 3D point cloud information via
Principal Component Analysis (PCA). The proposed
representation is low-dimensional, robust to noise and
suitable for object categorization and part-based grasp
hypotheses generation. However, as any other type of
reconstruction based on single views, computing ob-
jects bounding boxes is a ill posed problem due to lack
of observability of the self-occluded part. Therefore
some assumptions about the occluded part must be
taken. In this work, we consider that objects present
symmetries, so that we are able to reconstruct the un-
observed part of the point cloud. This models per-
fectly simple object shapes like boxes, spheres and
cylinders, and is a reasonable assumption for many
objects of daily usage when lying on a table. Once
the object is completed, global shape characteristics
can be extracted and used for object category reason-
ing, grasp planning and learning.
The remainder of the article is organized in the
following manner. In section 2 we overview some re-
lated work. Then, in section 3, we describe the pro-
posed methodologies. In section we assess the perfor-
mance of our approach in a real scenario 4. Finally, in
section 5 we draw some conclusions.
2 RELATED WORK
Object grasping and manipulation is one of the most
challenging tasks in today’s robotics. A fundamental
aspect behind the success of a grasping solution, is
the choice of the object representation. This should
be able to deal with incomplete and noisy percep-
tual data, and be suitable for real-time applications.
Moreover, these should be flexible enough to allow
for grasp generalization over multiple object classes.
2.1 Object Representations
Several object representations have been proposed
and used in the past to plan and learn grasping
Figueiredo R., Moreno P. and Bernardino A.
Automatic Object Shape Completion from 3D Point Clouds for Object Manipulation.
DOI: 10.5220/0006170005650570
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 565-570
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
565

and manipulation actions: complete meshes for
known objects (de Figueiredo et al., 2015), recon-
structed meshes for unknown objects (Aleotti et al.,
2012), and object part clusters modeled with su-
perquadrics (Faria et al., 2012), also for unknown ob-
jects. Despite these representations allowing for good
precision in representing the shape of the objects, they
suffer from high-dimensionality and varying descrip-
tion length, thus being hard to define a representation
of object categories suitable for generalization. Fur-
thermore, the noise present in the sensor data may
negatively influence representations with large num-
ber of parameters. Given the current perception tech-
nology, the most robust and simple features to repre-
sent objects, match their similarity with others, and
provide a basis for the definition of categories, must
be low-dimensional and rely on gross features, to pre-
vent over-fitting.
2.2 Shape Completion
In recent years shape completion using a single view
has been extensively studied, typically in robotics
grasping applications. Usually multiple object par-
tial views are acquired from different viewpoints, us-
ing 3D range cameras, and the gathered point clouds
are then registered and aligned together in a com-
mon reference frame. The Iterative Closest Point al-
gorithm (Besl and McKay, 1992) and efficient vari-
ants (Rusinkiewicz and Levoy, 2001) are often used to
compute the alignment transformations and to build
a complete object shape model (Chen and Medioni,
1992). However, when only a single view is avail-
able and/or it is not possible to acquire several views
due to time constraints or scenario/robot restrictions
the shape completion problem becomes harder and
some assumptions or pattern analysis must be made.
In this direction, a wide range of ideas have been
proposed including fitting the visible object surface
with primitive shapes such as cylinders, cones, paral-
lelepipeds (Marton et al., 2009; Kuehnle et al., 2008)
or with more complex parametric representations like
superquadrics (Biegelbauer and Vincze, 2007).
Closely related to our shape completion approach,
Thrun and Wegbreit (Thrun and Wegbreit, 2005) pro-
posed a method based on the symmetry assumption.
This method considers 5 basic and 3 composite types
of symmetries that are organized in an efficient entail-
ment hierarchy. It uses a probabilistic model to evalu-
ate and decide which are the completed shapes, gener-
ated by a set of hypothesized symmetries, that best fit
the object partial view. More recently Kroemer et al.
(Kroemer et al., 2012) proposed an extrusion-based
completion approach that is able to deal with shapes
that symmetry-based methods cannot handle. The
method starts by detecting potential planes of sym-
metry by combining the Thrun and Wegbreit method
with Mitra et al.’s fast voting scheme (Mitra et al.,
2006). Given a symmetry plane, an ICP algorithm
is used to decide the extrusion transformation to be
applied to the object partial point cloud. Despite the
fact that these methods were shown to be robust to
noise and were able to deal with a wide range of ob-
ject classes, they are inherently complex in terms of
computational effort and thus, not suitable in real-
time. Nevertheless, to simplify this problem, one can
take advantage of common scenario structures and
objects properties that are usually found in daily en-
vironments. They mostly involve man-made objects
that are typically symmetric and standing on top of
planar surfaces. For example, Bohg et al. (Bohg et al.,
2011) took advantage of the table-top assumption and
the fact that many objects have a plane of reflection
symmetry. Starting from the work of Thrun and Weg-
breit (Thrun and Wegbreit, 2005) and similar in spirit
to Bohg et al. (Bohg et al., 2011), we propose a new
computationally efficient shape completion approach
which translates a set of environmental assumptions
into a set of approximations, allowing us to recon-
struct the object point cloud in real-time, given a par-
tial view of the object.
3 METHODOLOGIES
The role of our algorithm is to obtain a semantic de-
scription of the perceived objects in terms of their
pose, symbolic parts and probability distributions
over possible object categories. The object segmenta-
tion step (Muja and Ciocarlie, ) is followed by part de-
tection and object category estimation, which rely on
a full object point cloud. When only a partial view of
the object is available, we employ a symmetry-based
methodology for object shape completion. Next, the
extraction of semantical parts is based on the object’s
dimensions along the main geometrical axes and can
be achieved by bounding-box analysis via PCA. The
low dimensional and efficient representation obtained
guides the division of each object into a set of seman-
tical parts, namely, top, middle, bottom, handle and
usable area. This reduces the search space for robot
grasp generation, prediction and planning. The next
subsections explain our symmetry-based method for
shape-completion and the division of the completed
point cloud into a set of semantical parts.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
566

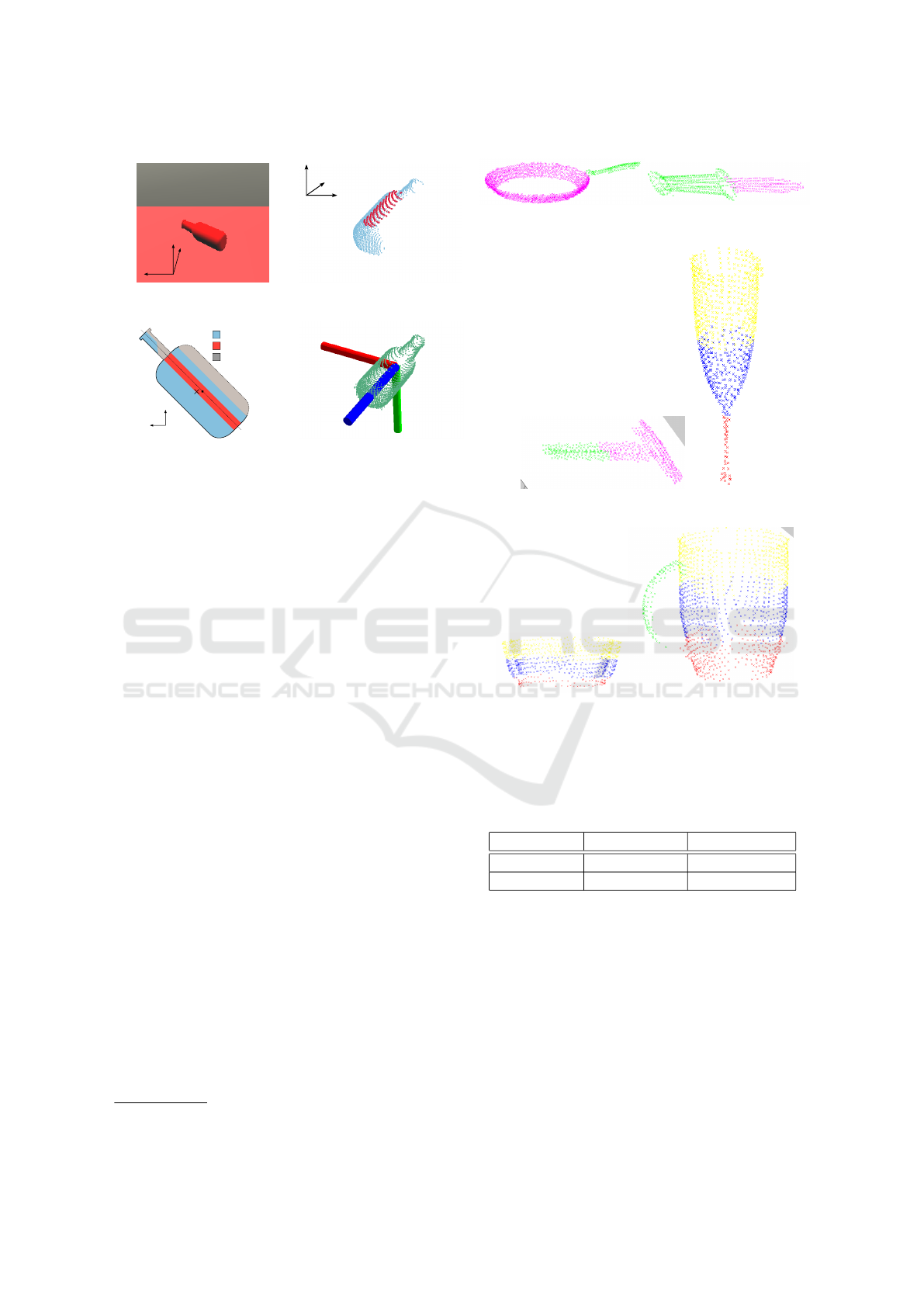
Figure 1: Objects having rotational symmetry.
3.1 Object Perception with Symmetry
Assumptions
As any other type of reconstruction based on single
views, computing the bounding-box of the object is
an ill posed problem due to lack of observability of
the self-occluded part. Thus, as for grasping proce-
dures it is necessary that the robot knows the com-
plete shape of the object of interest, some assump-
tions about the occluded part must be made. Inspired
by the work of Thrun and Wegbreit (Thrun and Weg-
breit, 2005) and Bohg et al. (Bohg et al., 2011) and
with computational efficiency in mind, we propose a
new approach that translates a set of assumptions and
rules of thumb observed in many daily environments
into a set of heuristics and approximations. They al-
low us to reconstruct the unobserved part of an object
point cloud in real-time, given a partial view.
We consider the following assumptions: a) the ob-
jects stand on top of a planar surface (table top as-
sumption); b) the camera is at a higher viewpoint; c)
the objects have rotational symmetry; d) their main
geometrical axes are either orthogonal or parallel to
the supporting plane; e) the axis of symmetry corre-
sponds to one of the main geometrical axes; and f)
the direction of the axis of symmetry indicates the ob-
ject’s pose (i.e., upright or sideways).
These constraints model perfectly simple box-like
and cylinder-like object shapes, such as kitchen-ware
tools, and are reasonable assumptions for many other
approximately symmetric objects, such as tools (see
Fig. 1). Analogous to (Bohg et al., 2011), we consider
only one type of symmetry, however we employ the
line reflection symmetry (Thrun and Wegbreit, 2005)
as it copes better with the object categories that we
want to detect.
Let P = {p} ⊂ R
3
be the set of visible object sur-
face points. Our shape completion algorithm finds the
object symmetry axis s reflecting all visible surface
points across it. This corresponds to rotating P around
s by 180
◦
. We determine s by analyzing the box that
encloses the set P, considering the principal directions
of the box and the dimensions along those directions.
The symmetry axis (i.e., principal direction) is or-
thogonal to the cross product of the bounding box di-
rections whose dimensions are the closest, and passes
through the bounding-box centroid. To cope with the
supporting plane assumption, we compute the hori-
zontal (i.e., table plane, xy) and vertical (i.e. table nor-
mal, z) bounding-box directions and their dimensions
separately. The vertical direction of the bounding-
box is given by the normal vector to the table plane
and its length is given by the furthest point from the
supporting plane d
z
= max
z
(P). Since the horizon-
tal directions are arbitrarily oriented in the support-
ing plane, we apply the projection of P onto the ta-
ble plane and compute the directions and their dimen-
sions in that space. The 2D components of the cen-
troid location on the table plane cannot be correctly
estimated from a partial view in most of the cases (as
illustrated in Fig. 2). Let W = {p
z=0
} ⊂ R
2
be the set
containing the projected points. We assume that the
top part of the object is visible and holds the symme-
try assumptions so that the object’s xy-centroid, c
xy
,
is obtained by considering only the top region points
W
top
= {w
top
} ⊂ W , satisfying the condition:
w
i
top
=
p
i
z=0
if p
z
> σd
z
/
0 otherwise
(1)
where σ ∈ [0, 1] is a parameter tuned according to
the camera view-point and the object shape curvature
(i.e., σ is higher for cylinder-like shapes and lower
for parallelepiped-like ones). The eigenvectors pro-
vided by PCA on the set W define the horizontal di-
rections whereas their lengths are given by projecting
the points in W onto its eigenvectors and finding the
maximum in each direction.
3.2 Part-based Object Representation
We consider two main types of objects: tools and
other objects. A tool has as parts a handle and a us-
able area, while the rest of the objects have top, mid-
dle, bottom parts and may have handles. When the
axis of symmetry is parallel to the supporting plane
and the lengths of the remaining directions are smaller
than a predefined threshold, we consider that the ob-
ject has a handle and a usable area. In order to cope
with objects such as mugs and pans we detect a han-
dle if a circle is fitted in the projected points W with a
large confidence. The points lying outside of the cir-
cle are labeled as handle. The rest of the points are
divided along the axis of symmetry into top, middle
and bottom. Fig. 3 illustrates examples of detected
semantic parts for several objects using our comple-
tion algorithm.
The bounding boxes of the object parts define the
pre-grasp hypotheses, providing two pre-grasp poses
Automatic Object Shape Completion from 3D Point Clouds for Object Manipulation
567
z
x
y
(a)
z
y
x
(b)
c
xy
Occluded region
W
top
W
y
x
(c)
x
z
y
(d)
Figure 2: 2D centroid estimation in the presence of self-
occlusion. (a) Bottle camera-view. (b) Visible region (blue)
and top visible region surface points (red). (c) Bottle pla-
nar projection: × marks the centroid of W (blue), whereas
• indicates the centroid of W
top
(red). (d) After shape com-
pletion, an object coordinate frame is defined as having its
origin at the bounding box centroid and z-axis aligned with
the symmetry axis.
for each face of a box, as illustrated in Fig. 4. The
final number of pre-grasp hypotheses is pruned in a
first stage by the task-dependent logical module and
in a second stage by a collision checker and the mo-
tion trajectory planner.
4 EXPERIMENTS
In order to evaluate the proposed approaches, we con-
sider two settings: In the first setting, the experiments
are run in a simulated environment (ORCA (Hour-
dakis et al., 2014)), which provides the sensor (laser
range camera Asus Xtion PRO (ASUS, )), objects and
interface to physics engine (Newton Game Dynamics
library (Jerez and Suero, )) where single objects are
placed on top of a table. The object poses considered
are upright or sideways due to the ambiguity between
upright and upside-down when using global shape
representations. The object semantic parts include:
top, middle, bottom, handle and usable area. The 18
different objects includes instances of categories pan,
cup, glass, bottle, can, hammer, screwdriver, knife
1
.
In the second setting, the experiments are run in an
real table-top scenario with 7 objects that belong to
the instances of categories glass(1), bottle(2), can(1),
hammer(1), screwdriver(1) and cup(1).
1
Available at http://www.first-mm.eu/data.html
(a) Pan (b) Knife
(c) Hammer (d) Glass
(e) Bowl (f) Mug
Figure 3: Semantic parts for several objects after applying
the completion algorithm. The colors correspond to parts as
follows: yellow - top, blue - middle, red - bottom, green -
handle, and magenta - usable area.
Table 1: Accuracy (%) for object part and pose detection.
Dataset Part detection Pose detection
Simulation 84.56 100
Real objects 82.14 100
The performance of our algorithm is based on the
correct detection of the object parts and their pose.
Results are shown in Table 1. We note that the PCA
global representation is able to cope well with object
pose detection, considering the table-top assumption
and the object categories assumed. We note that we
do not consider the upside-down pose for these tests,
as in real-world applications usual poses are upright
and sideways. Object part detection suffers from part
occlusion for particular object poses, reducing the
pipeline performance for object category prediction.
In addition to the accuracy, we stress the execution
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
568
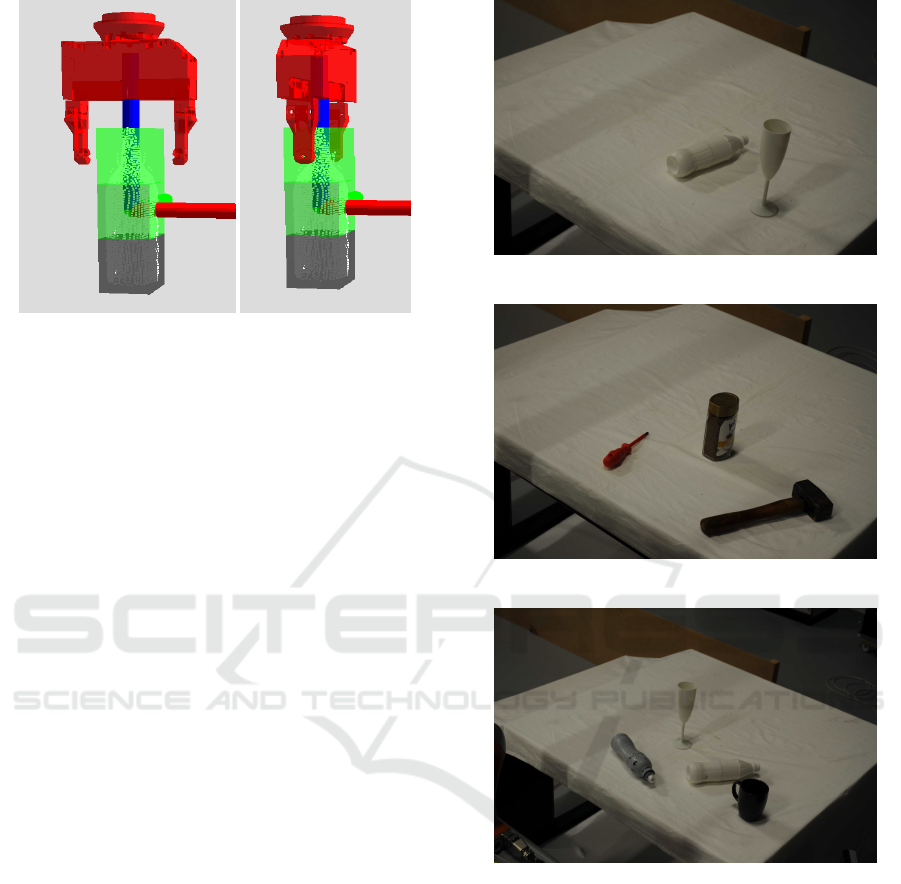
Figure 4: Examples of the pre-grasp gripper poses for a face
of the top part of a bottle.
time for the object completion using symmetries and
pose detection. The average execution times are 27.5
ms and 15.71 ms on a PC using one core of the Intel
Xeon (2.67GHz). These numbers confirm the com-
putational efficiency of our approach, which allows to
make fast decisions.
5 CONCLUSIONS
In this work we proposed a novel method for
symmetry-based shape completion from single-view
3D point clouds. Furthermore, we introduced bound-
ing box sizes and geometrical moments as features for
model-free categorization of every-day objects. We
showed that our approach is computationally efficient,
robust to noise and, hence, that can be used for pre-
grasp reasoning and learning, in real scenarios.
Despite being unsuitable to describe fine details,
our representation is robust to noisy perceptual data,
convenient for the definition of object categories,
which cover a large range of objects. It also pro-
vides a basis for reasoning about symmetries and can
be used as a fall-back mechanism for grasp planning
when other representations fail.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Portuguese Foundation for Science and Tech-
nology (FCT) project [UID/EEA/50009/2013].
Rui Figueiredo is funded by FCT PhD grant
PD/BD/105779/2014.
(a) Scenario 1
(b) Scenario 2
(c) Scenario 3
Figure 5: Experimental settings with the real table-top sce-
nario. Each picture shows the objects utilized for each ex-
periment.
REFERENCES
Aleotti, J., Rizzini, D. L., and Caselli, S. (2012). Ob-
ject categorization and grasping by parts from range
scan data. In Robotics and Automation (ICRA), 2012
IEEE International Conference on, pages 4190–4196.
IEEE.
ASUS. Asus xtion pro.
Besl, P. J. and McKay, N. D. (1992). A method for registra-
tion of 3-d shapes. IEEE Trans. Pattern Anal. Mach.
Intell., 14(2):239–256.
Automatic Object Shape Completion from 3D Point Clouds for Object Manipulation
569

Biegelbauer, G. and Vincze, M. (2007). Efficient 3d object
detection by fitting superquadrics to range image data
for robot’s object manipulation. In IEEE International
Conference on Robotics and Automation, pages 1086–
1091.
Bohg, J., Johnson-Roberson, M., Le
´
on, B., Felip, J., Gratal,
X., Bergstr
¨
om, N., Kragic, D., and Morales, A.
(2011). Mind the gap - robotic grasping under incom-
plete observation. In IEEE International Conference
on Robotics and Automation, pages 686–693.
Chen, Y. and Medioni, G. (1992). Object modelling by reg-
istration of multiple range images. Image Vision Com-
put., 10(3):145–155.
de Figueiredo, R. P., Moreno, P., and Bernardino, A. (2015).
Efficient pose estimation of rotationally symmetric
objects. Neurocomputing, 150:126–135.
Faria, D. R., Martins, R., Lobo, J., and Dias, J. (2012).
A probabilistic framework to detect suitable grasp-
ing regions on objects. IFAC Proceedings Volumes,
45(22):247 – 252.
Hourdakis, E., Chliveros, G., and Trahanias, P. (2014).
Orca: A multi-tier, physics based robotics simula-
tor. Journal of Software Engineering for Robotics,
5(2):13–24.
Jerez, J. and Suero, A. Newton Game Dynamics. Open-
source Physics Engine.
Kroemer, O., Ben Amor, H., Ewerton, M., and Peters, J.
(2012). Point cloud completion using symmetries and
extrusions. In Proceedings of the International Con-
ference on Humanoid Robots.
Kuehnle, J., Xue, Z., Stotz, M., Zoellner, J., Verl, A., and
Dillmann, R. (2008). Grasping in depth maps of
time-of-flight cameras. In International Workshop on
Robotic and Sensors Environments, pages 132–137.
Marton, Z. C., Goron, L., Rusu, R. B., and Beetz, M.
(2009). Reconstruction and Verification of 3D Ob-
ject Models for Grasping. In Proceedings of the 14th
International Symposium on Robotics Research.
Mitra, N. J., Guibas, L., and Pauly, M. (2006). Partial
and approximate symmetry detection for 3d geome-
try. ACM Transactions on Graphics, 25(3).
Muja, M. and Ciocarlie, M. Table top segmentation pack-
age.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm. In International Conference on
3-D Digital Imaging and Modeling.
Thrun, S. and Wegbreit, B. (2005). Shape from symme-
try. In International Conference on Computer Vision,
pages 1824–1831.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
570
