
Access Controlled Temporal Networks
Carlo Combi
1
, Roberto Posenato
1
, Luca Vigan
`
o
2
and Matteo Zavatteri
1
1
Department of Computer Science, University of Verona, Verona, Italy
2
Department of Informatics, King’s College London, London, U.K.
Keywords:
Access Control, Temporal Networks, Temporal Authorization, Dynamic Controllability, UPPAAL-TIGA.
Abstract:
We define Access-Controlled Temporal Networks (ACTNs) as an extension of Conditional Simple Temporal
Networks with Uncertainty (CSTNUs). CSTNUs are able to handle features such as contingent durations and
conditional constraints, and have thus been used to model the temporal constraints of workflows underlying
business processes. However, CSTNUs are unable to model users and authorization constraints, and thus can-
not model “who can do what, when”. ACTNs solve this problem by adding users and authorization constraints
that must be considered together with temporal constraints. Dynamic controllability (DC) of ACTNs ensures
the existence of an execution strategy, able to assign tasks to authorized users dynamically, satisfying all the
relevant authorization constraints no matter what contingent durations turn out to be or what conditional con-
straints have to be considered. We show that the DC checking can be done via Timed Game Automata and
provide experimental results using UPPAAL-TIGA on a concrete real-world case study.
1 INTRODUCTION
Context and Motivation. Workflow technology has
emerged as one of the leading technologies for mod-
eling, (re)designing, and executing business processes
in several different application domains. For instance,
workflows have been used to model processes for
industrial R&D, manufacturing, energy distribution,
banking processes, critical infrastructures and health-
care (Lenz and Reichert, 2007; Combi et al., 2014a).
The formal modeling of workflows has been in-
vestigated in quite some detail and, depending on
the characteristics the designers want to focus on,
different formal models have been employed to ver-
ify interesting properties of workflow instances. Re-
cent research has in particular investigated the model-
ing of temporal workflows by means of Conditional
Simple Temporal Networks with Uncertainty (CST-
NUs, (Combi et al., 2014a; Hunsberger et al., 2012)),
which can handle temporal plans subject to both con-
ditional constraints and contingencies simultaneously.
Time points (modeling the occurrence of the
events upon their “execution”) and constraints be-
tween pairs of time points are labeled by a conjunc-
tion of propositions saying when they must be consid-
ered. Each proposition is associated to an observation
time point, a special type of time point that assigns ei-
ther true or false to the proposition upon its execution.
Instead, a contingent duration between two time
points A and C represents a range (i.e., a real interval)
of allowed durations between A and C that cannot be
fixed by the executing agent (i.e., the controller). A is
the activation time point and it is under the control of
this agent, whereas C is the contingent time point, and
it is not. That is, whatever the duration turns out to
be, the time instant in which the uncontrollable event
modeled by the contingent link ends (i.e., C executes)
is only observed in real time.
CSTNUs can handle temporal plans subject to
both conditional constraints and contingencies. In a
CSTNU, the truth values of propositions and the con-
tingent durations are observed in real time as the net-
work executes. That is, before executing the network,
we do not know what constraints and time points will
be considered nor how long the contingent durations
will last. Hence, to deal with both contingent dura-
tions and truth value assignments, which are uncon-
trollable, the assignment of a task to a user must be
done in real time as different behaviors of such un-
controllable parts might (and most of the time do) en-
tail different assignments. If we pre-computed such
an assignment before starting, we would risk violat-
ing some constraint. The analysis must thus be boiled
down to controllability and not to mere consistency in
which scheduling tasks and deciding which users will
carry them out before the start of the execution would
be sufficient.
For these reasons, the “temporal networks” com-
118
Combi C., Posenato R., ViganÚ L. and Zavatteri M.
Access Controlled Temporal Networks.
DOI: 10.5220/0006185701180131
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 118-131
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
munity has devoted considerable interest to the anal-
ysis of dynamic controllability (DC): a CSTNU is
dynamically controllable if there exists an execution
strategy that executes all the parts under control of the
network by making decisions in real time depending
on how the uncontrollable parts behave. The aim of
this strategy is that of eventually satisfying all rele-
vant constraints. DC analysis is done by either dedi-
cated network-based algorithms (Combi et al., 2013;
Combi et al., 2014b) or translation to Timed Game
Automata (TGAs) (Cimatti et al., 2016).
However, CSTNUs fail to model access-
controlled workflows as they do not deal with
users and authorization constraints. To address this
problem, CSTNUs need to be extended by first
injecting users and authorization constraints and then
adapting the DC checking to answer to the workflow
satisfiability problem (WSP). WSP is the problem
of finding an assignment of tasks to users so that
the execution gets to the end without violating any
authorization constraint (Wang and Li, 2010). In a
temporal context we must also say when such an
assignment takes place.
Such an extension allows one to deal with situ-
ations in which users, authorization constraints and
temporal constraints must be considered all together
and not as disjoint at all. In fact, workflows and access
control have traditionally been approached as orthog-
onal, independent formalisms, but there are a large
number of relevant cases in which they cannot be con-
sidered so. For example, a surgeon, who has just car-
ried out a 4-hour intervention, is allowed to do another
one only after resting from 2 to 4 hours. Likewise, a
truck driver must rest for at least 45 minutes after a
driving shift of 4.5 hours. These temporal constraints
must be considered in conjunction with access control
as there is a mutual influence.
Contributions. Our contributions are three-fold.
First, we define Access-Controlled Temporal Net-
works (ACTNs) as an extension of CSTNUs by the
injection of users and authorization constraints, mo-
tivated by the need of handling workflows subject to
both temporal constraints and access control simul-
taneously. Each authorization constraint expresses a
temporal range, a label modeling the conditional part,
and an authorization policy expressing which the au-
thorized users are.
Second, we extend the encoding for CSTNUs into
TGAs and use sound and complete reachability al-
gorithms provided for TGAs by the UPPAAL-TIGA
software (Behrmann et al., 2007) to check whether an
ACTN is DC. The encoding we define is fully auto-
mated and generates the TGA in polynomial time.
Third, we discuss our approach by means of a con-
PatEv
[5,25]
EmergencyDoctor
?
SurInt
[60,210]
Surgeon
ICUStayM
[2,4]
Surgeon
FibTh
[60,65]
Cardiologist
ThAst
[2,10]
Cardiologist
?
LTTh
[5,10]
Cardiologist
[1,3]
urgent
(intervention)
[1,5]
[3 + ε,6]
[1,3] :6=
[2 + ε,5]
[1,2] :=
¬urgent
(therapy)
[1,5]
[1,6]
[1,6]
[1,3]
S[0, 30]S
S[0, ∞]S :6=
S[0, ∞]S :6= ∧¬Relatives
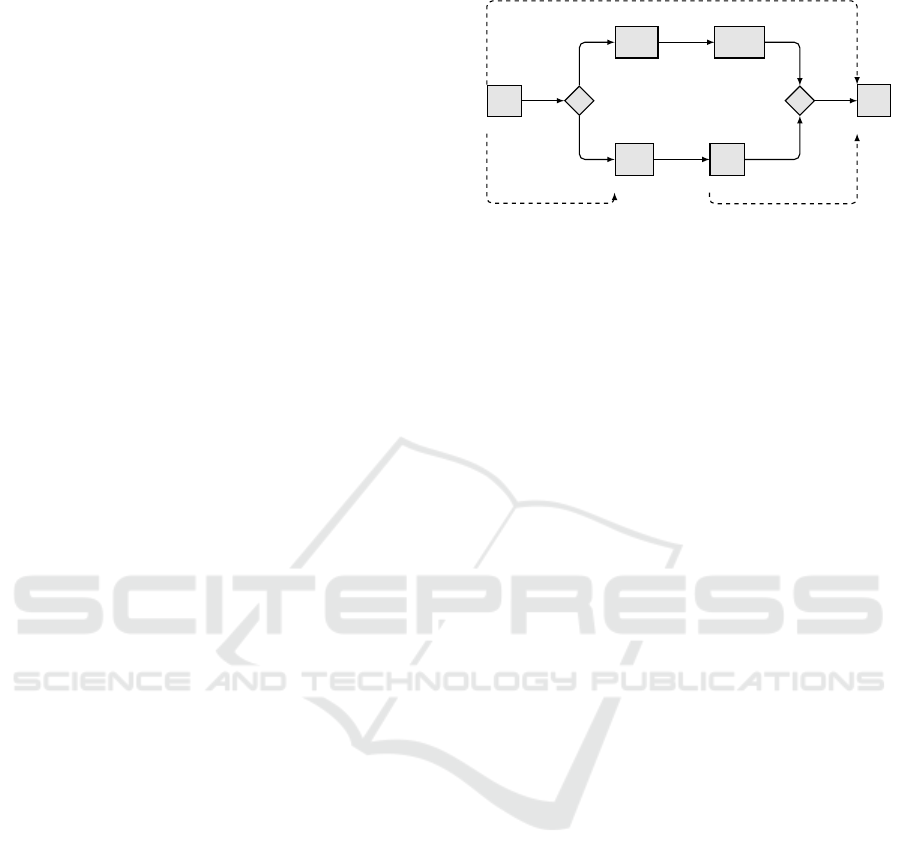
Figure 1: Official STEMI guidelines (excerpt). We model
TSoD as [1, 3] :6=, TBoD as [1,2] :=. Ranges [x, y] and
[x + ε, y] model all durations t s.t. x ≤ t ≤ y and x < t ≤ y,
respectively.
crete, real-world case study from the e-health domain
implemented in UPPAAL-TIGA.
Organization. § 2 introduces our case study. § 3 re-
views essential background on CSTNUs and the en-
coding into TGAs. § 4 defines ACTNs along with
their execution semantics. § 5 extends the encoding
into TGAs given for CSTNUs. § 6 discusses related
work. § 7 sums up and discusses future work.
2 THE STEMI GUIDELINES
As a simple but real-world (thus fully realistic)
case study, we consider a simplification of the offi-
cial guidelines for the treatment of STEMI patients
(i.e., patients with ST-Elevation Myocardial Infarc-
tion), published by the American College of Cardiol-
ogy/American Heart Association (see the discussion
in (Combi et al., 2014a)). As we discuss below, none
of the previous works can handle such a “simple” ex-
ample as they are not expressive (or formal) enough.
Fig. 1 shows the workflow; task durations, delays
and temporal ranges are in minutes. The workflow
starts with a patient evaluation (PatEv), in which an
EmergencyDoctor establishes if the patient is in need
of immediate medical attention. If the patient is ur-
gent, a surgery intervention (SurInt) takes place. As
soon as the intervention has finished, a Surgeon has
to manage the patient’s stay in the Intensive Care Unit
(ICUStayM). This task lasts at least 2 minutes and at
most 4. In addition, following the Temporal Sepa-
ration of Duties (TSoD) policy, whenever ICUStayM
starts within 3 minutes since the end of SurInt, the
Surgeons executing the two tasks must be differ-
ent. TSoD does not apply if this temporal distance
is greater than 3.
If the patient is not urgent, a fibrinolytic ther-
apy (FibTh) takes place. This task lasts at least 60
and at most 65 minutes, and according to the guide-
Access Controlled Temporal Networks
119

A
1
[]
C
1
[]
U?
[]
A
2
[u]
C
2
[u]
A
4
[¬u]
C
4
[¬u]
[5,25] [1,3], [1,5],u [60,210]
[1,5], ¬u
[60,65][0,30], ¬u
Figure 2: CSTNU modeling a portion of the workflow given
in Fig. 1. (A
1
,5, 25,C
1
) models PatEv, (A
2
,60, 210,C
2
)
models SurInt and (A
4
,60, 65,C
4
) models FibTh. U?
models the conditional split.
lines, it has to start within 30 minutes since PatEv
has started. After FibTh has terminated, a therapy
assessment (ThAst) starts with minimal and maximal
allowed durations 2 and 10 minutes, respectively. Fol-
lowing the Temporal Binding Of Duties (TBoD) pol-
icy, if the start of ThAst is within 2 minutes since the
end of FibTh, then the same Cardiologist must ex-
ecute the two tasks. TBoD does not apply if this tem-
poral distance is greater than 2 minutes.
Regardless of the chosen branch, after the last task
in that branch has finished, a long term therapy assess-
ment (LTTh) starts. The minimal and maximal dura-
tions for this task are 5 and 10 minutes, respectively.
A security policy requires that the Cardiologist ex-
ecuting LTTh must be (i) different from and not a rel-
ative of the one who executed PatEv, and different
from the one who executed ThAst if the patient was
not urgent.
We will consider a role-based access control en-
vironment in which EmergencyDoctor contains users
John and Lara, Surgeon contains Bob, Tom and Sara,
and Cardiologist contains Lara, Kate and Rick.
3 CSTNUs
In this section, we provide background on CSTNUs
that will be essential to understand our ACTNs.
Given a set P of propositional letters, a label is
any (possibly empty) conjunction of literals, where a
literal is either a propositional letter p ∈ P or its nega-
tion ¬p. The empty label is denoted by . The label
universe of P , denoted by P
∗
, is the set of all pos-
sible labels representing all possible (finite) conjunc-
tions of literals we can obtain from P e.g., the label
universe of P = {p, q} is P
∗
= {, p,q, ¬p, ¬q, p ∧
q, p ∧ ¬q, ¬p ∧ q, ¬p ∧ ¬q}. Two labels
1
,
2
∈ P
∗
are consistent if and only if their conjunction
1
∧
2
is satisfiable and a label
1
entails a label
2
(written
1
⇒
2
) iff all literals in
2
appear in
1
too (i.e., if
1
is more specific than
2
). Any label ∈ P
∗
entails both
itself (i.e., ⇒ ) and the empty label (i.e., ⇒ ).
Definition 1. A Conditional Simple Temporal Net-
work with Uncertainty (CSTNU, (Hunsberger et al.,
2012)) is a tuple hT , C , L,OT , O, P ,C T ,Li, where:
(1) T is a finite set of time points.
(2) P is a finite set of propositional letters.
(3) L : T → P
∗
is a function assigning a label to each
time point in T saying in what scenarios the time
point must be considered.
(4) OT ⊆ T is a set of observation time points, where
each P? ∈ OT is associated to a proposition p,
whose truth value is unknown before P? executes.
(5) O : P → OT is a bijection associating a unique
observation time point to each propositional letter.
(6) CT ⊂ T is a set of contingent time points such
that OT ∩ CT =
/
0.
(7) L is a set of contingent links each one having
the form (A, x,y,C), where A ∈ T and C ∈ CT
are different time points (written A 6≡ C), x, y ∈ R
(0 < x < y < ∞), and L(A) = L(C). Once A is ex-
ecuted, C is only observed to occur (as it is out of
control). However, C is guaranteed to occur such
that C − A ∈ [x, y]. For any pair (A
1
,x
1
,y
1
,C
1
),
(A
2
,x
2
,y
2
,C
2
) ∈ L, C
1
6≡ C
2
.
(8) C is a set of labeled constraints each one having
the form (Y − X ≤ k, ), where X,Y ∈ T , k ∈ R
and ∈ P
∗
. Many labeled constraints between
two time points X and Y can be specified, pro-
vided that their labels are different.
(9) ⇒ L(Y )∧L(X) for each (Y −X ≤ k,) ∈ C (con-
straint label coherence), and ⇒ L(O(p)) for
each p or ¬p appearing in (constraint label hon-
esty) (Hunsberger et al., 2015).
(10) For each X ∈ T , if p or ¬p appears in X ’s la-
bel, then L(X ) ⇒ L(O(p)), and (O(p) − X ≤
−ε,L(X)) ∈ C for some ε > 0 (time point label
honesty) (Hunsberger et al., 2015).
We represent a CSTNU as a directed multi-graph
where the set of nodes coincides with the set of time
points, whereas the set of edges is partitioned in re-
quirement and contingent links. We draw a require-
ment link
1
as X
[x,y],
−−−→ Y meaning that once X exe-
cutes, Y must execute such that Y − X ∈ [x,y] if
holds. We draw a contingent link (A, x, y,C) ∈ L
as A
[x,y]
==⇒ C, where the label [x,y] implicitly means
[x, y], with = L(A) = L(C).
Fig. 2 shows an example of a CSTNU modeling a
portion of the workflow in Fig. 1 without access con-
trol. We mapped PatEv into (A
1
,5,25,C
1
), SurInt
into (A
2
,60,210,C
2
), FibTh into (A
4
,60,65,C
4
), and
the conditional split connector (diamond) into the ob-
servation time point U?. Once executed, U? sets
1
X
[x,y],
−−−→ Y models (Y − X ≤ y, ), (X −Y ≤ −x, ) ∈ C.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
120

the value of the proposition u and, thus, some con-
straints could be disabled (those having label incon-
sistent with u). We point out it is possible to decide
when to execute U? but not the truth value for u.
DC has been recently investigated by using TGAs,
allowing one to work with sound and complete al-
gorithms, and to synthesize memoryless execution
strategies (Cimatti et al., 2016). In particular, DC
is modeled as a game between two players: the con-
troller ctrl executing all non-contingent time points
and the environment env executing the contingent
ones and assigning truth values to propositions. The
purpose of ctrl is to get to the goal location reach-
able as soon as all time points have been executed and
all constraints have been satisfied with respect to the
specific scenario, whereas that of the env is to prevent
ctrl from getting there. If env wins, the network is
not DC, otherwise it is.
Definition 2. A Timed Automaton (TA) consists of a
finite set of locations Loc (with l
0
the initial one), a fi-
nite set of actions Act, a finite set of real-value clocks
X , a transition relation →⊆ Loc×H (X )×Act×2
X
×
Loc, where elements in H (X ) are conjunctions of
clock constraints of the form x k or y − x k with
x, y ∈ X , k ∈ Z and ∈ {<, ≤, =, >, ≥}, and a func-
tion Inv : Loc → H (X ) assigning an invariant (i.e., a
conjunction of clock constraints) to each location.
A Timed Game Automaton (TGA) extends a TA by
partitioning the set of transitions in controllable and
uncontrollable transitions.
In any run, all clocks start at zero and evolve uni-
formly. Each transition has the form (l
i
;G; N; R; l
j
),
where l
i
is the start location, G is a guard made of a
conjunction of atomic constraints x y over clocks, N
is the name of the transition, R is a (possibly empty)
set of clocks to reset (the update part) and l
j
is the
end location. A location is urgent when the automa-
ton must not remain in the location.
Encoding CSTNUs into TGAs. In what follows, we
provide the encoding given in (Cimatti et al., 2016)
from a CSTNU into an equivalent TGA. Since we
use UPPAAL-TIGA for checking the resulting TGA,
we use integer and Boolean variables to improve effi-
ciency and readability.
Assume that G in Fig. 3 is the TGA equivalent to
the CSTNU S in Fig. 2. The core of G consists of
three locations:
• ctrl (urgent) modeling the execution of the non
contingent time points,
• env (initial) modeling the occurrence of contin-
gent time points and truth value assignments, and
• goal, which, if reached, implies DC of S.
Differently from the traditional use of TGAs where
env is associated with uncontrollable transitions, here
env is assigned with controllable transitions, whereas
ctrl is assigned with uncontrollable ones. This is
necessary to model the fact that in any CSTNU env
must be able to react instantaneously upon the execu-
tion of a control time point (Cimatti et al., 2016).
We model the interplay of the game between ctrl
and env by means of a clock c
δ
and two transitions,
• (ctrl;>;pass; c
δ
:= 0;env), and
• (env;c
δ
> 0;gain;
/
0;ctrl)
The first transition guarantees that, after an action
of the agent, the environment can react immediately.
The second one guarantees that the agent can react
to an environment action only after a positive delay.
Each control time point X is associated to a clock cX
and a Boolean variable xX (initially set to ⊥). We
model the execution of X as an uncontrollable self-
loop transition
• (ctrl;¬xX; ExX; xX := >, cX := 0; ctrl).
Fig. 3 contains 4 transitions shortened as τ
A
1
, τ
U?
, τ
A
2
,
τ
A
4
modeling the execution A
1
,U?, A
2
,A
4
of Fig. 2.
Clock ˆc represents the global time and it is never
reset. ¬xX (equivalently, cX = ˆc) means that X has not
been executed yet, whereas xX (equivalently, cX < ˆc)
means that X has been executed. Since cX will be
never reset again and clocks never stop, the differ-
ence ˆc−cX represents the execution time instant of X,
when greater than 0, as the run starts at env and gets
to ctrl only after a positive amount of time (gain
transition, c
δ
> 0).
Each propositional letter p associated to an ob-
servation control time point P? has an associated
bounded integer variable p whose value is 0 before
P? executes (i.e., for p unknown), −1 if p is assigned
⊥, and 1 if p is assigned >. To manage the truth value
assignment to p, we have two controllable transitions
• (env;xP?∧p = 0;pTrue; p := 1,c
δ
:= 0; env), and
• (env;xP? ∧ p = 0; pFalse;p := −1, c
δ
:= 0;env)
setting p = 1 and p = −1, respectively. A third un-
controllable transition
• (env;xP? ∧ p = 0 ∧ c
δ
> 0;fail
p
;
/
0;goal)
allows ctrl to win the game (i.e., to get to goal) if
env fails or refuses to assign p a value immediately
after P? has been executed. In Fig. 3, we have exactly
3 transitions for u (the unique proposition appearing
in the CSTNU in Fig. 2) shortened as τ
u
⊥
, τ
u
>
(truth
value assignment), and φ
u
(fail transition).
For each contingent link (A,x, y,C) ∈ L, env has
a controllable self-loop transition
• (env;xA ∧ ¬xC ∧ cA ≥ x ∧ cA ≤ y; ExC; xC :=
>,cC := 0, c
δ
:= 0;env)
to execute C, and ctrl has an uncontrollable one
Access Controlled Temporal Networks
121

• (ctrl;xA ∧ ¬xC ∧cA > y; fail
C
;
/
0;goal)
to win the game if env fails or refuses to schedule C
such that C − A ∈ [x, y]. The first transition states that
the activation point has been executed (xA), C has not
been yet executed (¬xC) and it is still within the al-
lowed bounds x and y, since cA, representing the time
since the execution of A, is greater-or-equal than x and
lower-or-equal than y. Fail transitions (for any uncer-
tain part) are necessary, otherwise env would always
be able to prevent ctrl from winning the game just
“waiting forever” in its own location. In Fig. 3, we
have 6 transitions shortened as τ
C
1
, τ
C
2
, τ
C
4
(contin-
gent point executions), and φ
C
1
, φ
C
2
, φ
C
4
(fail).
We model winning conditions as a winning path of
n+1 urgent locations L
→ L
1
→ · · · → L
n
(= goal)
going from env to goal, where n is the number of
distinct labels appearing in S. The first location in
this path is always L
, reachable as soon as all “un-
labeled” time points have been executed satisfying all
related constraints. Then, the remaining locations are
sequentially connected through sets of transitions.
Each set of transitions between two consecutive
locations represents two cases: (i) the first location is
not associated to the current scenario and a transition
allows one to move to the next location, or (ii) the
first location is associated to the current scenario and
a transition allows one to move to the next location
only if all the constraints labeled by the label the next
location represents are satisfied.
For example, consider the set of transitions going
from L
u
to goal (i.e., L
¬u
) in Fig. 3. The related con-
ditional constraint to generate this set is: “in the sce-
nario in which U? has been executed and u has been
assigned ⊥, all time points labeled by ¬u must be ex-
ecuted and all constraints labeled by ¬u must be sat-
isfied”. This condition is expressed by: (xU? ∧ u =
−1) ⇒ G
¬u
, where G
¬u
def
= xA
4
∧ xC
4
∧ cU? − cA
4
≤
5 ∧ cA
4
− cU? ≤ −1 ∧ cA
1
− cA
4
≤ 30 ∧ cA
4
− cA
1
≤
0.
2
Since TGAs do not allow disjunction nor negation
(of clock constraints) in the guards, we rewrite the
condition as ¬(xU? ∧ u = −1)∨ G
¬u
, which simplifies
to ¬xU? ∨ u = 1 ∨ G
¬u
, and we generate a transition
for each disjunct (Fig. 3, sat
¬u
, skip
1
¬u
, skip
2
¬u
). We
proceed similarly to connect L
to L
u
.
DC checking is done by model checking the
resulting TGA and seeking a control strategy
for env to win the game. In UPPAAL-TIGA,
this goal is formalized as control: A[] not
tga.goal. If UPPAAL-TIGA answers Property
is NOT satisfied, then the network is DC and a
2
For each Y − X ≤ k ∈ C, the corresponding guard is
( ˆc − cY) − (ˆc − cX) ≤ k, which simplifies in cX − cY ≤ k as
∀X ∈ T ,( ˆc − cX) is the time in which X was executed.
ctrl
env
L
L
u
goal
(L
¬u
)
h>;pass; c
δ
:= 0i
hc
δ
> 0;gain;
/
0i
τ
A
1
τ
U?
τ
A
2
τ
A
4
τ
C
1
τ
C
2
τ
C
4
τ
u
>
τ
u
⊥
φ
C
1
φ
C
2
φ
C
4
φ
u
hG
,sat
,
/
0i
hu = −1; skip
2
u
;
/
0i
h!xU?;skip
1
u
;
/
0i
hG
u
;sat
u
;
/
0i
hu = 1; skip
2
¬u
;
/
0i
h!xU?;skip
1
¬u
;
/
0i
hG
¬u
;sat
¬u
;
/
0i
Figure 3: TGA equivalent to the CSTNU in Fig. 2.
counter-strategy for ctrl can be printed out.
4 ACTNs
An ACTN extends a CSTNU by adding a set of users
U and turning C into a set of sets each one contain-
ing (possibly several disjunctive) authorization con-
straints. Users are in charge of executing time points,
whereas authorization constraints say which users are
authorized to execute the time points they connect.
Before giving the formal definition, we introduce a
few useful notions.
A relation over users is denoted by ρ ⊆ U × U,
with the neutral relation ∗
def
= U × U
def
= {(u
1
,u
2
) |
u
1
∈ U ∧ u
2
∈ U} and the complement of ρ denoted
by ¬ρ. If (u
1
,u
2
) ∈ ρ, then we say that the pair satis-
fies the relation.
Given a finite set R = {ρ
1
,. . . , ρ
n
} of relations, an
authorization policy α is any conjunction of relations
drawn from R , each one appearing as ρ or ¬ρ if dif-
ferent from ∗. If a relation appears as ρ (respectively,
¬ρ), then we say that ρ is positive (respectively, neg-
ative). The neutral authorization policy, i.e., that con-
sisting of ∗ only, is denoted by ~. A pair (u
1
,u
2
)
satisfies an authorization policy α iff (u
1
,u
2
) satis-
fies each ρ ∈ α and does not satisfy each ρ such that
¬ρ ∈ α. An authorization policy α
1
entails another
authorization policy α
2
(written α
1
⇒ α
2
) iff α
1
con-
tains all the relations appearing in α
2
. Two autho-
rization policies α
1
and α
2
are consistent if α
1
∧ α
2
is satisfiable, and equivalent if both α
1
entails α
2
and
α
2
entails α
1
(i.e., α
1
⇒ α
2
and α
2
⇒ α
1
).
For example, suppose that U = {John, Lara, Tom,
Bob, Sara, Rick, Kate} and R = {∗, 6=, Relatives},
with 6=
def
= {(u
1
,u
2
) | u
1
,u
2
∈ U ∧ u
1
6= u
2
} and
Relatives
def
= {(John, Kate), (Kate, John)}. Consider
the policy α
def
= 6= ∧¬Relatives given in Fig. 1 be-
tween PatEv and LTTh saying that the physician giv-
ing the patient the long term therapy must be different
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
122

and not a relative of the physician who did the initial
evaluation. If John carries out the initial PatEv, then
Lara can execute LTTh as (John, Lara) satisfies α.
Definition 3. An Access-Controlled Temporal Net-
work (ACTN) is a tuple hT ,U, UA,C , R ,L, OT , O,P ,
CT , Li, where:
• T , L, OT , O, P , CT ,L are the same as for a
CSTNU along with all assumptions on contingent
links (A,x, y,C).
• U is a non-empty finite set of users.
• UA ⊆ U × T is the authorization relation.
A(X) = {u | (u,X) ∈ UA} is the set of users au-
thorized for X.
• R is a finite set of relations ρ ⊆ U × U.
• C is a set of sets such that each set C
XY
∈ C
consists of a (possibly many) authorization con-
straints of the form (x ≤ Y − X ≤ y, : α)
3
where
x, y ∈ R ∪ ±∞, Y, X ∈ T , ∈ P
∗
, α is an autho-
rization policy.
• = L(X) ∧ L(Y ) for each (x ≤ Y − X ≤ y, :
α) ∈ C
XY
, and , L(X),L(Y ) entail L(P?) for each
p,¬p ∈ , L(X), L(Y ).
• For each pair (x
1
≤ Y −X ≤ y
1
,
1
: α
1
),(x
2
≤ Y −
X ≤ y
2
,
2
: α
2
) belonging to the same set C
XY
, if
[x
1
,y
1
] = [x
2
,y
2
], then α
1
6= α
2
(note that
1
=
2
).
• For each (A,x, y,C) ∈ L, we have that A is non-
contingent (i.e., A 6∈ CT ), and A(A) = A(C).
• For each (A
1
,x
1
,y
1
,C
1
),(A
2
,x
2
,y
2
,C
2
) ∈ L, we
have that A
1
6≡ A
2
and C
1
6≡ C
2
.
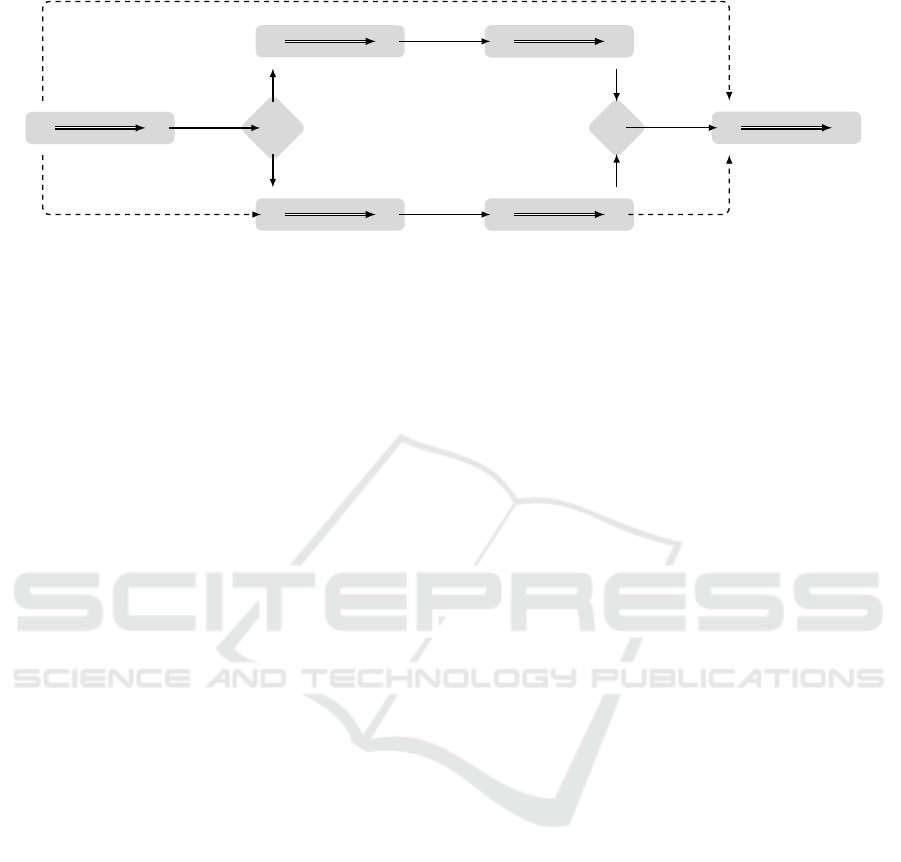
The ACTN-graph extends the CSTNU-graph by
labeling requirement links X → Y by (possibly many)
labels of the form [x, y], : α each one corresponding
to the authorization constraint (x ≤ Y −X ≤ y, : α) ∈
C
XY
. Fig. 4 gives an example of an ACTN that mod-
els the workflow in Fig. 1 considering access con-
trol. Again, we map PatEv to (A
1
,5,25,C
1
) and its
authorized users are A(A
1
) = A(C
1
) = {John, Lara}
who belong to the role EmergencyDoctor. We
map SurInt and ICUStayM to (A
2
,60,210,C
2
) and
(A
3
,2,4,C
3
), respectively, and their authorized users
are A(A
2
) = A(C
2
) = A(A
3
) = A(C
3
) = {Bob, Sara,
Tom}, who belong to the role Surgeon. We
map FibTh, ThAst, and LTTh to (A
4
,60,65,C
4
),
(A
5
,2,10,C
5
), and (A
6
,5,10,C
6
), respectively, and
their authorized users are A(A
4
) = A(C
4
) = A(A
5
) =
A(C
5
) = A(A
6
) = A(C
6
) = {Lara, Kate, Rick}, who
belong to the role Cardiologist (note that Lara is a
specialist in two medical fields, so she belongs to two
roles).
3
(x ≤ Y − X ≤ y, : α) shortens (Y − X ≤ y, : α) and
(X −Y ≤ −x, : α). We assume C
XY
= C
YX
.
We model the conditional split and join connec-
tors (shaded diamonds) by means of U ? and E, and
we connect all the components by means of autho-
rization constraints, which also impose relative con-
straints among two non-sequential tasks specifying
authorization policies. For example, we model the
TSoD between tasks SurInt and ICUStayM by means
of the authorization constraint C
2
[1,3],u:6=
−−−−−→ A
3
. It says
that once C
2
has been executed (i.e., SurInt has been
completed), say by Bob at time t = 90 , then either Tom
or Sara can execute A
3
(i.e., start ICUStayM) from
time 91 to 96. The second authorization constraint
C
2
[3+ε,6],u:~
−−−−−−→ A
3
ensures that TSoD does not apply
otherwise allowing all users to execute A
3
from time
93 + ε to 96 (we use ε to make sure that no overlap
exists between [1,3] and [3 + ε, 6]).
Execution Semantics. We give the execution seman-
tics of ACTNs in terms of real-time execution deci-
sions (RTEDs). Intuitively, an RTED is a decision
to commit some users(s) to executing a set of time
points, or a decision to wait for something to happen
or an instantaneous reaction.
In what follows, we adapt the RTEDs for CSTNUs
given in (Cimatti et al., 2016) by also renaming a few
symbols and adding details for explanatory purposes.
For an ACTN, the controller (ctrl) seeks a strategy
for committing available users to executing all rele-
vant control time points (i.e., the part under control)
such that all relevant constraints in C will eventually
be satisfied no matter what durations the environment
(env) chooses for contingent links and truth values
for propositions. Thus, RTEDs exist for both ctrl
and env. We study the interplay between these two
RTEDs in terms of partial and full outcomes, which
determine how the state of the whole system evolves.
In this paper, we assume that each contingent link
(A,x, y,C) is (i) tied to one range [x, y] only, and (ii)
executed by one user only who, once he has executed
A, remains blocked until the execution of C. We leave
as future work the generalization of the approach to
handling situations in which users are given less (or
more) time for the same task.
The set of all available users is Avail ⊆ U, so that
u ∈ Avail means that u is available and busy otherwise.
The initial state is Avail = U meaning that all users
are available. Blocking users guarantees us that the
same user can be committed for more than one task
in a parallel block ensuring this user will be always
executing one task at a time.
Definition 4. A partial schedule for an ACTN is a
pair P S = (OccTP, KnownProp), where OccTP is a
set of triples (u, X , k) meaning that user u executed
time point X at time k, and KnownProp is a set of pairs
Access Controlled Temporal Networks
123

(p, b) meaning that p has been assigned b ∈ {>, ⊥}.
We represent the current partial scenario (i.e., the
scenario being generated upon the execution of the
observation time points) by means of the label
cps
consisting of the conjunction of the already known
literals (i.e.,
cps
= {p | (p, >) ∈ KnownProp}∪ {¬q |
(q,⊥) ∈ KnownProp}).
Executed(OccTP) = {X | (u, X , k) ∈ OccTP} is
the set of executed time points and Instants(OccTP) =
{k | (u, X, k) ∈ OccTP} is the set of time instants in
which the time points in Executed(OccTP) were exe-
cuted. For each X ∈ Executed(OccTP), we represent
the time instant k in which X was executed as time(X)
and the user who executed it as user(X ).
We represent the time instant of the
last executed time point as last(OccTP) =
max{v | v ∈ Instants(OccTP)}; if OccTP =
/
0,
then last(OccTP) = −∞.
P S is called respectful if all (u, X , k) ∈ OccTP sat-
isfy the constraints in C . The set of all possible partial
schedules is represented by P S
∗
.
Definition 5. An RTED for ctrl has two forms:
wait or (t, ControlTP).
• ∆
ctrl
= wait is applicable only if a contingent
time point has been activated (i.e., the activation
time point A has been executed but the related
contingent C has not).
• ∆
ctrl
= (t, ControlTP) represents the conditional
constraints “if env does nothing before time t,
then for each pair (u, X ) ∈ ControlTP, commit
the user u to execute the time point X at time t”.
Such an RTED is applicable iff t > last(OccTP),
ControlTP is a non empty set of pairs of avail-
able users and unexecuted time points. That is, for
each (u, X ) ∈ ControlTP, X 6∈ Executed(OccTP)
and u ∈ Avail. Finally, for each (u
1
,X
1
),(u
2
,X
2
) ∈
ControlTP, if X
1
and X
2
are (different) activation
points, then u
1
6= u
2
. If X
1
is an activation point
and X
2
is not, then we execute X
2
first. This is
because activation points block users.
An RTED for the environment env (in symbols,
∆
env
) has two forms: wait or (t,ContingentTP).
• ∆
env
= wait is applicable only if no contingent
point C has been activated.
• ∆
env
= (t, ContingentTP) represents the condi-
tional constraints “if ctrl does nothing before
or at time t, then execute the time points in
ContingentTP at time t”. Such a decision is ap-
plicable iff t > last(OccTP), ContingentTP is a
non empty subset of unexecuted contingent points
whose ranges of allowed durations contain t.
The sets of all RTEDs for ctrl and env are rep-
resented by ∆
∗
ctrl
and ∆
∗
env
, respectively.
In other words, ∆
ctrl
deals with the parts under
control: users and non-contingent time points. ∆
env
deals with the parts out of control: contingent time
points and truth value assignments.
Definition 6. Let PS = (OccTP,KnownProp) be a
partial schedule in which at least one contingent time
point C has been activated and is allowed to be exe-
cuted at last(OccTP). An instantaneous reaction IR
is a decision
(1) to execute a set I
C
of such time points at time
last(OccTP), or
(2) to assign truth values for each proposition associ-
ated to the observation time points in OccTP that
has not been assigned yet (we model such an as-
signment as a set I
B
of pairs (p, b) with p ∈ P and
b ∈ {>, ⊥}), or
(3) to do both actions.
We represent an I R as a pair (I
C
,I
B
). The set of all
instantaneous reactions is represented by IR
∗
.
If last(OccTP) happens to be the last possible time
at which a currently-activated contingent time point C
can execute, then the instantaneous reaction must in-
clude C. Similarly, if t is the time in which an obser-
vation time point P? was executed, the instantaneous
reaction must include a truth value assignment for p.
Of course, env can carry out more than one I R .
We now define how ∆
ctrl
and ∆
env
are handled. Since
both players can either wait or conditionally commit
to executing a set of time points, we have four pos-
sible cases (we point out that a wait decision is not
applicable for both ctrl and env simultaneously).
Definition 7. We model the partial outcome of ∆
ctrl
and ∆
env
as O
p
(OccTP,∆
ctrl
,∆
env
) neglecting any
I R . We have four possible cases.
(1) O
p
(OccTP,wait,(t, ContingentTP)) = OccTP ∪
{(user(A),C,t) | C ∈ ContingentTP} and for each
C ∈ ContingentTP,Avail = Avail∪user(C), where
A is the activation time point that activated C.
(2) O
p
(OccTP,(t
1
,ControlTP), (t
2
,ContingentTP)) =
OccTP ∪ {(user(A),C,t
2
) | C ∈ ContingentTP} if
t
2
< t
1
and for each C ∈ ContingentTP, Avail =
Avail ∪ user(C), where A is the activation time
point that activated C.
(3) O
p
(OccTP,(t, ControlTP),wait) = OccTP ∪
{(u,X,t) | (u, X) ∈ ControlTP} and for each
(u,A) ∈ ControlTP, Avail = Avail \ u.
(4) O
p
(OccTP,(t
1
,ControlTP), (t
2
,ContingentTP)) =
OccTP∪{(u, X,t
1
) | (u, X) ∈ ControlTP} if t
1
≤ t
2
and for each (u, A) ∈ ControlTP,Avail = Avail \ u.
For example, O
p
(OccTP,(0,{(John,A
1
)}),wait)
= OccTP ∪ {(John, A
1
,0)}.
(1) says that env can execute the time points in
ContingentTP at time t if ctrl decides to do nothing
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
124

at that time. (2) says that env can execute the time
points in ContingentTP if he decided to do so before
ctrl executes his. (3) is similar to (1) but with respect
to ctrl. (4) says that when ctrl decides to execute a
set of time points before or at the same time of those
env has decided to execute, ctrl moves first to allow
env to react instantaneously (Definition 8).
Definition 8. We model the full outcome of ∆
ctrl
and ∆
env
as O(OccTP, ∆
ctrl
,∆
env
,I R ) and define it
as we did for O
p
(OccTP,wait,(t, ContingentTP)) ex-
cept that in cases (3) and (4) OccTP is augmented with
{(C,t) | C ∈ I
C
} (applicable if C has been activated),
and KnownProp is augmented with {(p, b) | (p, b) ∈
I
B
} (applicable if P? has been executed). Either way
t = last(OccTP).
The full outcome says how the state of the system
(i.e., PS) evolves according to the interplay of ctrl’s
and env’s RTEDs.
Definition 9. An RTED-based strategy for ctrl is
a mapping σ
ctrl
: P S
∗
→ ∆
∗
ctrl
from respectful par-
tial schedules to RTEDs. An RTED-based strategy for
env is a pair of mappings σ
env
= (µ
∆
env
,µ
IR
), where
µ
∆
env
: PS
∗
→ ∆
∗
ctrl
is a mapping from respectful par-
tial schedules to RTEDs, and µ
IR
: P S
∗
→ I R
∗
is a
mapping from respectful partial schedules to instan-
taneous reactions.
Definition 10. The one-step outcome of the ga-
me modeling the execution of the network by
ctrl and env is defined as O
1
(OccTP,σ
ctrl
,σ
env
) =
O(OccTP, σ
ctrl
(OccTP),µ
∆
env
(OccTP),µ
IR
(OccTP
p
)),
where OccTP
p
= O
p
(OccTP,σ
ctrl
(OccTP),
µ
∆
env
(OccTP)).
The terminal outcome O
∗
(σ
ctrl
,σ
env
) is the
complete schedule that results from the re-
cursive definition: OccTP
0
=
/
0, OccTP
i+1
=
O
1
(OccTP
i
,σ
ctrl
,σ
env
).
Definition 11. An ACTN is DC if there exists
an RTED-based strategy σ
ctrl
such that for all
RTED-based strategies σ
env
, the variable assignments
(u,X, k) in the complete schedule O
∗
(σ
ctrl
,σ
env
) sat-
isfy all constraints in C.
5 DYNAMIC
CONTROLLABILITY OF
ACTNS USING UPPAAL-TIGA
In this section, we extend the mapping given in § 3,
we use UPPAAL-TIGA as an off-the-shelf model
checker and we discuss a few optimizations.
Assume that G in Fig. 5 is the TGA equivalent to
the ACTN S in Fig. 4. The core of the TGA remains
the same as that discussed in § 3.
Internal State. We represent relations, users and
their availability by extending the internal states of
the TGA with a new piece of information. We assign
a unique incremental integer starting from 0 to each
time point, and proceed similarly for each user and
proposition. Mapping time points, users and propo-
sitions to integers allows us to employ them as in-
dexes over array data structures we are going to use
in UPPAAL-TIGA. Without loss of generality, when
intended as indexes, we abuse notation and write u,
X, and p meaning their assigned integer.
We chose to model availability of users as a
Boolean vector Avail indexed on users. Hence,
Avail[u] = > means that u is available and busy other-
wise. The initial state of Avail consists of all elements
set to > meaning that all users are available.
We keep track of who did what by means of a sys-
tem trace vector SysTrace whose index ranges over
time points. If SysTrace[X] = u, then time point X has
been executed by user u. The initial state of SysTrace
consists of all elements set to -1, meaning that all time
points have not been executed yet.
For instance, if John has executed A
1
, then
SysTrace[A
1
] = John. We do not need to keep track of
when a time point X has been executed since its value
is given by the difference between global time and its
clock.
We reorganize clocks associated to time points by
means of a vector clk indexed on time points, i.e.,
clk[X] is the clock associated to the time point X .
The vector clk does not contain clocks ˆc (representing
global time) and c
δ
(used in the guards and updates of
the transitions modeling the interplay between ctrl
and env). Likewise, we reorganize Boolean variables
associated to time points by means of a vector xtd in-
dexed on time points whose elements are initialized
to ⊥. Finally, we reorganize propositions by means
of an integer vector prop whose elements are initial-
ized to 0.
Predecessors and Transition Range Limitations.
Before extending the transition guards and updates we
discuss a few optimizations. The mapping given in § 3
generates a transition for each time point. However,
if we only focus on transitions involving control time
points (i.e., those representing the execution of all X
such that X 6∈ CT ), one of the problems is that there
is no partial order for these transitions.
As a results, that approach suffers from a full state
explosion as we can take those transitions to gener-
ate impossible runs. To give an example, consider
the workflow in Fig. 1. Assume that the patient is
Access Controlled Temporal Networks
125
A
1
{John,Lara}
[]
C
1
{John,Lara}
[]
U?
{wf}
[]
A
2
{Bob,Tom, Sara}
[u]
C
2
{Bob,Tom, Sara}
[u]
A
3
{Bob,Tom, Sara}
[u]
C
3
{Bob,Tom, Sara}
[u]
A
4
{Lara,Kate, Rick}
[¬u]
C
4
{Lara,Kate, Rick}
[¬u]
A
5
{Lara,Kate, Rick}
[¬u]
C
5
{Lara,Kate, Rick}
[¬u]
E
{wf}
[]
A
6
{Lara,Kate, Rick}
[]
C
6
{Lara,Kate, Rick}
[]
[5,25] [1,3], : ~
[1,5], u : ~
[60,210]
[3 + ε,6], u : ~
[1,3], u :6= [2,4]
[1,6], u : ~
[1,5], ¬u : ~
[60,65]
[2 + ε,5], ¬u : ~
[1,2], ¬u := [2, 10]
[1,6], ¬u : ~
[1,3], : ~ [5,10]
[0,30], ¬u : ~ [0,∞], ¬u :6=
[0,∞], :6= ∧¬Relatives
Figure 4: ACTN modeling the workflow given in Fig. 1.
not urgent (i.e., u = ⊥). In this scenario, we expect
to execute PatEv then SurInt then ICUStayM, and fi-
nally LTTh. However, the transitions for A
1
,A
2
,A
3
,A
6
(modeling to the start of the tasks just mentioned) also
allow us to explore those runs violating this execu-
tion order (e.g., SurInt before PatEv or LTTh before
SurInt). We enforce the execution order among time
points in the guards of the corresponding transitions
only when we are sure this order is not ambiguous.
Definition 12. Let Y be a control time point (Y 6∈
CT ). For any X ∈ T different from Y , we say that
X is a predecessor of Y (and write X ∈ Π(Y )) if all
authorization constraints between X and Y have a pos-
itive lower bound (x ≥ 0) and label identical to that
of Y . Formally:
Π(Y ) = {X | (x ≤ Y − X ≤ y, : α) ∈ C
XY
∧ x ≥ 0∧
= L(Y )}
If X ∈ Π(Y ) it follows that Y −X ∈ [x
min
,y
max
], where
• x
min
= min{x | (x ≤ Y − X ≤ y, : α) ∈ C
XY
}, and
• y
max
= max{y | (x ≤ Y − X ≤ y, : α) ∈ C
XY
}
That is, if all authorization constraints between X
and Y have a positive lower bound and label equal to
L(Y ) (i.e., we must satisfy at least one of them when-
ever we consider Y ), then Y definitely executes after
X. Moreover, once we have executed X, we can ex-
ecute Y after at least the minimum among the lower
bounds (x
min
) and within the maximum of the upper
bounds (y
max
) of the authorization constraints in C
XY
,
to consider all the possible disjunctions.
As an example, consider Fig. 4. Π(A
3
) = {C
2
}
since C
C
2
A
3
= {(1 ≤ A
3
−C
2
≤ 3, u :6=), (3 + ε ≤ A
3
−
C
2
≤ 6,u : ~)} and L(A
3
) = u. Moreover, once env
executes C
2
, ctrl can execute A
3
such that A
3
−C
2
∈
[1,6] (x
min
= 1 and y
max
= 6). Likewise, Π(A
5
) =
{C
4
}, A
5
−C
4
∈ [1, 5]. Π(U?) = {C
1
} and U? −C
1
∈
[1,3]. Π(A
6
) = {E, A
1
}, A
6
−E ∈ [1, 3] and A
6
−A
1
∈
[0,∞]. Π(A
2
) = {U?} and A
2
−U? ∈ [1, 5]. Π(A
4
) =
{U?,A
1
} and A
4
−U? ∈ [1, 5], A
4
− A
1
∈ [0,30].
Instead, we cannot do much for E, since each con-
straint having E as a target has a label that is not en-
tailed by (i.e., L(E)). That is, for (1 ≤ E − C
3
≤
6,u : ~) ∈ C
C
3
E
and (1 ≤ E −C
5
≤ 6, ¬u : ~) ∈ C
C
5
E
,
we have that L(E) 6⇒ u nor L(E) 6⇒ ¬u. We recall
that we always execute E since its label, , is entailed
by any scenario. But, if scenario u (respectively, ¬u)
holds, the guard of the transition enforcing the par-
tial order (i.e., that considering Π(E)) would become
conditional depending on the current partial scenario.
For E, we would generate three transitions: one for
with Π(E) =
/
0, one for u with Π(E) = {C
3
} and
C
3
−E ∈ [1,6], and another for ¬u with Π(E) = {C
5
}
and C
5
− E ∈ [1, 6].
Although such an approach risks making the en-
coding exponential, we should also prove that the
generated transitions do not prevent some scenario
from being explored by the model-checking phase.
For this reason, each Π(Y ) contains a predecessor
only when we are sure that X ∈ Π(Y ) always comes
before Y (similarly, we do not consider the case “C
5
is before A
6
”).
Note that activation time points are trivially be-
fore their related contingent and already handled with
a similar approach in the guards of the transitions ex-
ecuting them at env.
Time Point Transitions. For each user authorized for
X (where X 6∈ C T ), we have an uncontrollable self-
loop transition having the form:
(ctrl;Guard(u, X ); uExX; Update(u, X, setBusy); ctrl)
where:
• Guard(u, X)
def
= ¬xtd[X]
V
p∈L(X)
(prop[p] =
1)
V
¬q∈L(X)
(prop[q] = −1) ∧ Avail[u]
V
Y ∈Π(X)
(xtd[Y ] ∧ clk[Y ] ≥ x
min
∧ clk[Y ] ≤ y
max
). This
function formalizes the mandatory part in the
guard: X has not been executed yet, L(X ) is true,
the authorized user u is available, all Y ∈ Π(X )
have been executed and clk[Y ] ∈ [x
min
,y
max
] (as
discussed before).
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
126

• Update(u,X, setBusy)
def
= xtd[X] := >, clk[X] :=
0, SysTrace[X] := u, Avail[u] := ¬setBusy. This
function formalizes the mandatory part in the up-
date: X has been executed by u at time ˆc − clk[X],
and u is now busy (setBusy) if X is an activation
time point.
For concreteness, consider the self loop τ
Kate,A
5
=
(ctrl;Guard(Kate, A
5
);KateExA
5
;Update(Kate,A
5
,
>);ctrli in Fig. 5. It says that if the patient is not
urgent, Kate can start ThAst (i.e., Kate executes A
5
)
after 1 and within 5 minutes, after FibTh has been
completed (i.e., xtd[C
4
] ∧ clk[C
4
] ≥ 1 ∧ clk[C
4
] ≤ 5).
τ
Kate,A
5
along with other 18 similar self loops τ
u,X
model the authorized executions of all non contingent
time points.
For each contingent time point, we only extend the
update part of the transition given in § 3 by adding
the two statements SysTrace[C] := SysTrace[A], and
Avail[SysTrace[C]] := >. That is, first, we save that
the user executing C is the same of that who executed
A, and second, we release such a user. Note that the
guard does not contain conditions on availability on
purpose. Adding such conditions would result in env
shrinking the range of C.
Game Interplay, Failing Transitions, and Winning
Path Considering Disjunctive Constraints. Failing
transitions and transitions regulating the game inter-
play and assigning the truth values to propositions re-
main the same as those discussed in § 3 (adapted to
the new array-reorganization).
The winning path is extended by adding interme-
diate locations to guarantee that whenever disjunctive
authorization constraints exist, we always take into
consideration one of them. We proceed by first intro-
ducing the set of core constraints (i.e., those we must
always consider for the traditional winning path).
Definition 13. Let ∈ P
∗
be a label. The set of core
constraints labeled by is given by:
Core() =
[
C
XY
∈C
{(x ≤Y −X ≤ y, : α) | |C
XY
| = 1∧
(x ≤ Y − X ≤ y, : α) ∈ C
XY
∧ = L(X ) ∧ L(Y )}
For our example, Core(u) = {(1 ≤ A
2
−U? ≤ 5, u :
~),(1 ≤ E −C
3
≤ 6,u : ~)}. Note that we do not take
into consideration C
C
2
A
3
= {(1 ≤ C
3
− C
2
≤ 3,u :6=
),(3 + ε ≤ C
3
−C
2
≤ 6,u : ~)} as |C
C
2
A
3
| = 2.
G
u
in Fig. 5 verifies both that all time points la-
beled by u have been executed and that the core con-
straints and their related authorization policies they
express are satisfied. skip
u
1
and skip
u
2
are the same
as those discussed for classic CSTNUs in § 3.
We now deal with the disjunctive authorization
constraints. We first compute the set of non-core con-
straints (dual to the set core), i.e., the set contain-
ing all the disjunctions with respect to a given label
. Then, we generate the locations and transitions to
verify that we satisfy at least one authorization con-
straint for each disjunction avoiding the combinatorial
explosion.
Definition 14. Let ∈ P
∗
be a label. The set of non-
core constraints labeled by for each C
XY
is given by:
NonCore(C
XY
,) = {(x ≤Y −X ≤ y, : α) | |C
XY
| > 1
∧ (x ≤ Y − X ≤ y, : α) ∈ C
XY
∧ = L(X ) ∧ L(Y )}
For our example, NonCore(C
A
3
C
2
,u) = {(1 ≤
A
3
−C
2
≤ 3,u :6=), (3 +ε ≤ A
3
−C
2
≤ 6,u : ~)}. That
is, either A
3
is executed such that A
3
− C
2
∈ [1,3]
and TSoD (6=) must hold, or A
3
is executed such that
A
3
−C
2
∈ [3 + ε, 6] and any user can do so (~).
To handle the disjunctions with respect to the la-
bel for each NonCore(C
XY
,), we create an interme-
diate location L
C
XY
,
to avoid generating an exponen-
tial number of transitions. For each L
C
XY
,
, we have
a set of transitions containing the same skip tran-
sitions as those for L
and we have a sat transition
for each disjunct in NonCore(C
XY
,). Concretely, for
NonCore(C
A
3
C
2
,u), we generate L
C
C
2
A
3
,u
(shortened
as L
0
u
in Fig. 5), sat
1
C
2
A
3
,u
(verifying the first disjunc-
tion) and sat
2
C
2
A
3
,u
(verifying the second one).
Likewise, we generate L
C
C
4
A
5
,¬u
(i.e., goal),
sat
1
C
4
A
5
,¬u
and sat
2
C
4
A
5
,¬u
for NonCore(C
C
4
A
5
,¬u).
We discuss the complexity and prove the correct-
ness of the encoding in the appendix (Theorem 1 and
Theorem 2-3, respectively).
The ACTN in Fig. 4 is DC. One of the possible
executions is the following. ctrl starts the work-
flow in Fig. 1 by assigning PatEv to John. As soon
as John finishes (i.e., env executes C
1
), ctrl com-
mits the workflow management system wf to execute
the conditional split connector (modeled by U ?). If
the patient is urgent (i.e., if u is assigned >), then
SurInt is assigned to Tom and exactly 1 minute af-
ter Tom is done, ICUStayM is assigned to Bob (since a
TSoD must hold). If the patient is not urgent, FibTh
and ThAst are both carried out by Lara because the
start of ThAst occurs one minute after FibTh and thus
a TBoD must hold. Regardless of which branch has
been taken, ctrl commits wf to execute the join con-
nector 1 minute after the last task of the chosen branch
terminated. Finally, ctrl commits Rick, who is dif-
ferent from and not related to Lara or John, to exe-
cuting LTTh 1 minute after the join connector ended.
Access Controlled Temporal Networks
127

ctrl
env
L
L
u
L
0
u
L
¬u
goal
h>;pass; c
δ
:= 0i
hc
δ
> 0; gain;
/
0i
τ
John,A
1
τ
Lara,A
1
τ
wf,U?
τ
Tom,A
2
τ
Sara,A
2
τ
Bob,A
2
τ
Tom,A
3
τ
Sara,A
3
τ
Bob,A
3
τ
Kate,A
4
τ
Lara,A
4
τ
Rick,A
4
τ
Lara,A
5
τ
Kate,A
5
τ
Rick,A
5
τ
wf,E
τ
Lara,A
6
τ
Kate,A
6
τ
Rick,A
6
τ
C
1
τ
C
2
τ
C
3
τ
C
4
τ
C
5
τ
C
6
τ
u
>
τ
u
⊥
hclk[A
1
] ∧ ¬clk[C
1
] ∧ clk[A
1
] > 25; fail
C
1
;i
hclk[A
2
] ∧ ¬clk[C
2
] ∧ clk[A
2
] > 210; fail
C
2
;i
hclk[A
3
] ∧ ¬clk[C
3
] ∧ clk[A
3
] > 4; fail
C
3
;i
hclk[A
4
] ∧ ¬clk[C
4
] ∧ clk[A
4
] > 65; fail
C
4
;i
hclk[A
5
] ∧ ¬clk[C
5
] ∧ clk[A
5
] > 10; fail
C
5
;i
hclk[A
6
] ∧ ¬clk[C
6
] ∧ clk[A
6
] > 10; fail
C
6
;i
hxtd[U?] ∧ prop[u] = 0 ∧ c
δ
> 0; fail
u
;i
hG
;sat
∧ c
δ
> 0; i
hprop[u] = −1;skip
2
u
;
/
0i
h!xtd[U?]; skip
1
u
;
/
0i
hG
u
;sat
u
;
/
0i
hprop[u] = −1;skip
2
u
;
/
0i
h!xtd[U?]; skip
1
u
;
/
0i
hG
2
C
2
A
3
,u
;sat
2
C
2
A
3
,u
;
/
0i
hG
1
C
2
A
3
,u
;sat
1
C
2
A
3
,u
;sat
u
;
/
0i
hprop[u] = −1;skip
2
¬u
;
/
0i
h!xtd[U?]; skip
1
¬u
;
/
0i
hG
¬u
;sat
¬u
;
/
0i
hprop[u] = −1;skip
2
¬u
;
/
0i
h!xtd[U?]; skip
1
¬u
;
/
0i
hG
2
C
4
A
5
,¬u
;sat
2
C
4
A
5
,¬u
;
/
0i
hG
1
C
4
A
5
,¬u
;sat
1
C
4
A
5
,¬u
;
/
0i
Figure 5: TGA equivalent to the ACTN in Fig. 4.
6 RELATED WORK
There exist two main classes of algorithms for check-
ing the DC of a CSTNU: network-based and TGA-
based ones.
The network-based algorithms in (Combi et al.,
2013; Combi et al., 2014b) take as input a CSTNU
and check if the network is DC: they are sound but
not complete.
TGAs allow one to determine a sound and com-
plete DC-checking algorithm. DC of a CSTNU is
implemented by first encoding a given CSTNU into
an equivalent TGA (as we discussed) and then, seek-
ing a control strategy for the env—via TCTL model
checking— to prevent ctrl from heading to a special
location called goal. If env succeeds, the network
is not DC, otherwise it is. The correctness of the ap-
proach is proved in (Cimatti et al., 2016).
The structured business process modeling lan-
guage TNest is introduced in (Combi et al., 2014a).
To understand whether a temporal workflow is DC,
the TNest specification is translated in an equivalent
CSTNU on which DC checking is done. TNest does
not deal with users and authorization constraints.
The work closest to ours is by (Combi et al.,
2016), who used an STNU (Morris et al., 2001) to
model an unconditional temporal role-based access-
controlled workflow. They translated a fragment of
a TRBAC (Bertino et al., 2001) into a temporal net-
work, and the workflow into another. Then, they con-
nected the resulting networks in order to check if the
temporal constraints of the workflow and those of the
access-control model are contradictory. Finally, they
derived for each task the set of authorized users and
gave a formalization of security constraints (SCs) and
Security Constraints Propagation Rules (SCPR) to en-
force authorization constraints at execution time. DC
analysis in the WSP sense is left as future work. In
contrast, in this paper we directly inject users and
authorization constraints in the formalization of the
ACTN itself, and we do not only deal with TSoD and
TBoD, but also with other security policies expressed
by means of relations over users.
(Wang and Li, 2010) and (Crampton et al., 2014)
(to name a few) have addressed the WSP. If an ACTN
modeling a workflow is DC, then the temporal WSP is
automatically answered. The execution strategy pro-
vides us with information about who and when has to
execute which time points depending on what is going
on. This assignment is generated in real time.
Finally, approaches such as those proposed by
(Barth et al., 2007) and (Barletta et al., 2011) are not
really suitable to model temporal workflows as we are
doing. First, we do not need to use messages, and sec-
ond, we have to know exactly when each transition is
taken (with respect to when we started) in order to
propagate the effect (which means to run algorithms
on the network to update the allowed temporal ranges
of the unexecuted time points. Timed computation
tree logic (TCTL) is able to deal with this problem
(recall that we use dense time, rather than discrete ap-
proximations). The logics in (Barth et al., 2007) and
(Barletta et al., 2011) have no dense time representa-
tion (clocks) and they do not allow for computation
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
128

over real-valued temporal constraints.
7 CONCLUDING REMARKS
We defined ACTNs as an extension of CSTNUs in
order to take into consideration users and authoriza-
tion constraints, and we used them to analyze the of-
ficial STEMI guidelines as a concrete example. We
similarly extended the execution semantics for CST-
NUs given in terms of RTEDs. After that, we pro-
vided an encoding from ACTNs to TGAs discussing
a few optimizations to speed up the model-checking
phase. We proved that our encoding is polynomial,
fully automated, and we also showed the correctness
(see the appendix). As a result, we provided a sound
and complete approach for the temporal WSP. As a fi-
nal contribution, we discussed our experimental eval-
uation using the UPPAAL-TIGA software tool. We
are currently implementing the encoder from ACTNs
into TGAs and an executor for executing the ACTN
following the synthesized strategy.
As future work we will investigate two main di-
rections, distinguished by the use, or not, of TGAs.
In the first case, we plan to address the workflow re-
siliency problem, which is a refinement of the WSP
when a subset of the authorized user may become
absent before or during the execution (again, a new
kind of uncertainty that needs a controllability ap-
proach). In the second, we plan to devise a network-
based constraint-propagation algorithm for ACTN
DC-checking. These algorithms might be more com-
plex but are typically faster than TCTL model check-
ing as they tighten the network by ruling out all im-
possible execution strategies.
Finally, we plan to provide a structured modeling
language for designing access-controlled workflows
to be mapped into ACTNs for the DC checking.
REFERENCES
Barletta, M., Ranise, S., and Vigan
`
o, L. (2011). A
declarative two-level framework to specify and
verify workflow and authorization policies in
service-oriented architectures. SOCA, 5(2):105–137,
http://dx.doi.org/10.1007/s11761-010-0073-4.
Barth, A., Mitchell, J., Datta, A., and Sundaram,
S. (2007). Privacy and utility in business
processes. In CSF ’07, pages 279–294.
http://dx.doi.org/10.1109/CSF.2007.26.
Behrmann, G., Cougnard, A., David, A., Fleury, E.,
Larsen, K. G., and Lime, D. (2007). Uppaal-tiga:
Time for playing games! In Damm, W. and Her-
manns, H., editors, CAV 2007, LNCS, pages 121–125.
http://dx.doi.org/10.1007/978-3-540-73368-3 14.
Bertino, E., Bonatti, P. A., and Ferrari, E. (2001). TRBAC:
A temporal role-based access control model. ACM
Trans. Inf. Syst. Secur., 4(3).
Cimatti, A., Hunsberger, L., Micheli, A., Posenato, R., and
Roveri, M. (2016). Dynamic controllability via timed
game automata. Acta Informatica, 53(6–8):681–722,
http://dx.doi.org/10.1007/s00236-016-0257-2.
Combi, C., Gambini, M., Migliorini, S., and Pose-
nato, R. (2014a). Representing business pro-
cesses through a temporal data-centric workflow
modeling language: An application to the man-
agement of clinical pathways. IEEE Trans.
Syst., Man, Cybern., Syst., 44(9):1182–1203,
http://dx.doi.org/10.1109/TSMC.2014.2300055.
Combi, C., Hunsberger, L., and Posenato, R. (2013). An
algorithm for checking the dynamic controllability of
a conditional simple temporal network with uncer-
tainty. In ICAART 2013, volume 2, pages 144–156.
http://dx.doi.org/10.5220/0004256101440156.
Combi, C., Hunsberger, L., and Posenato, R. (2014b).
An algorithm for checking the dynamic controllabil-
ity of a conditional simple temporal network with
uncertainty - revisited. In Agents and Artificial In-
telligence, volume 449 of CCIS, pages 314–331.
http://dx.doi.org/10.1007/978-3-662-44440-5 19.
Combi, C., Vigan
`
o, L., and Zavatteri, M. (2016).
Security constraints in temporal role-based
access-controlled workflows. In CODASPY.
http://dx.doi.org/10.1145/2857705.2857716.
Crampton, J., Huth, M., and Kuo, J. H.-P. (2014).
Authorized workflow schemas: deciding re-
alizability through LTL model checking. Int
J Softw Tools Technol Transfer, 16(1):31–48,
http://dx.doi.org/10.1007/s10009-012-0269-3.
Hunsberger, L., Posenato, R., and Combi, C. (2012). The
Dynamic Controllability of Conditional STNs with
Uncertainty. In PlanEx at ICAPS 2012, pages 1–8.
http://arxiv.org/abs/1212.2005.
Hunsberger, L., Posenato, R., and Combi, C. (2015). A
sound-and-complete propagation-based algorithm for
checking the dynamic consistency of conditional sim-
ple temporal networks. In TIME 2015, pages 4–18.
http://dx.doi.org/10.1109/TIME.2015.26.
Lenz, R. and Reichert, M. (2007). It support
for healthcare processes - premises, challenges,
perspectives. Data Knowl. Eng., 61(1):39–58,
http://dx.doi.org/10.1016/j.datak.2006.04.007.
Morris, P. H., Muscettola, N., and Vidal, T. (2001). Dy-
namic control of plans with temporal uncertainty. In
IJCAI 2001, pages 494–502.
Wang, Q. and Li, N. (2010). Satisfiability and resiliency
in workflow authorization systems. ACM Trans. Inf.
Syst. Secur., 13(4).
APPENDIX
Theorem 1. Encoding ACTNs into TGAs has
polynomial-time complexity.
Proof. The main components having a role in the
complexity analysis of the encoding of an ACTN are:
Access Controlled Temporal Networks
129

(i) time points, (ii) authorized users for each control
time point, (iii) authorization constraints, and (iv) dif-
ferent labels in the ACTN.
For each control time point, there is a self-loop
transition for any authorized user. These transitions
contain in their guard the scenario in which the time
point has to be executed and may contain additional
conditions about the predecessors. From § 4, the com-
plexity of finding the predecessors for a time point
X is linear in the number of all authorization con-
straints. Thus, the generation of these transitions is
a polynomial-time task.
Transitions modeling the execution of the contin-
gent time points and assigning truth values are the
same as those given for CSTNUs (we just extend the
update part), and they are not even replicated for the
authorized users. Fail transitions and the transitions
regulating the game interplay remain exactly the same
as well. Thus, the time complexity of the generation
of this set of transitions remains polynomial.
We are left to prove that the generation of the win-
ning path is a polynomial-time task too. The main
problem is that such a path consists of intermediate
locations that must allow one to consider all possi-
ble combinations of the disjunctions expressed as au-
thorization constraints. The generation of the win-
ning path is the same of that for CSTNUs (augmented
with the checks for the authorization policies) when
we consider the set of core constraints (polynomial).
When considering the non core authorization con-
straints we create as many intermediate locations as
the number of disjunctions. However, we remark that
our encoding does not generate any combination of
the sat transitions nor a combination of the locations.
The model-checking phase will take care of exploring
them all. Thus, the generation of the winning path
has linear complexity in the number of the different
labels with respect to the number of the possible dis-
junctions.
Since all operations have polynomial complexity,
the overall complexity is polynomial as well.
Theorem 2. Encoding ACTNs into TGAs correctly
captures the execution semantics given in § 4.
Proof. We show that any sequence of partial sched-
ules that can be generated for any ACTN according to
the execution semantics given in § 4 corresponds to a
run for the equivalent TGA that can be generated by
following its transitions according to the classic TGA
semantics. We extend the proof of correctness given
in (Cimatti et al., 2016) to accommodate users and
authorization constraints. The proof is by induction.
Each respectful partial schedule that can be gener-
ated for the ACTN corresponds to a state of the TGA
in which: the location is env, c
δ
= 0, last(OccTP) =
ˆc, and for each executed time point X, time(X) = ˆc −
clk[X], xtd[X ] = >, user(X) = SysTrace[X], whereas
time(X) = ˆc, xtd[X ] = ⊥ and user(X) if X hasn’t
been executed yet. If P? is an observation time point,
then KnownProp contains (p, b) for b ∈ {>,⊥} if
P? has been executed, and doesn’t contain it other-
wise. Also, if some activation point has been exe-
cuted by the user u and the related contingent has
not, then Avail[u] = ⊥, else Avail[u] = >. Note that
Avail[u] = > and Avail[u] = ⊥ (in the TGA) mean
u ∈ Avail and u 6∈ Avail in the execution semantics
given in § 4 (where Avail is a set).
Base Case. The initial P S corresponds to the
initial state of the TGA in which the location is
env, ˆc = 0 all clocks clk[X] = 0, all xtd[X] = ⊥, all
SysTrace[X] = −1, all prop[p] = 0, and Avail[u] = >.
This partial schedule is trivially respectful.
Inductive Step. Suppose that PS is a respectful
partial schedule that can be generated according to the
execution semantics for ACTNs, and that PS satisfies
the invariant that we required of each respectful par-
tial schedule at the beginning of this proof.
Let θ be the corresponding state of the TGA. Since
c
δ
= 0, the only transitions that are immediately en-
abled are those handling contingent time point execu-
tions and truth value assignments. These transitions,
if taken, correspond to env’s instantaneous reactions,
in which a set of one or more contingent time-points
can be executed simultaneously or some propositions
can be assigned a value. Suppose that env doesn’t
take any transition when c
δ
= 0. As soon as c
δ
> 0,
both ctrl and env have transitions that they could
take at any time with respect to the enforced condi-
tion over the predecessors. For example, env might
decide to execute one or more contingent time-points
C
1
,. . . ,C
n
when c
δ
= 3. That would correspond to
∆
env
= (k, {C
1
,. . . ,C
n
}), where k = last(OccTP) + 3.
Since each time env takes a transition c
δ
is re-
set to 0, ctrl is unable to interrupt env while env is
executing contingent time points and assigning truth
values to propositions. Thus, at those time instants
∆
ctrl
= wait and the resulting outcomes are exactly
the cases 1-2 of Definition 7. The guard of env’s
transition, enforcing the duration bounds for a con-
tingent link (A,x, y,C), ensures that the resulting par-
tial schedule is respectful as C can only be executed
such that C − A ∈ [x, y] (analogous to predecessors).
Likewise, for a truth value assignment the fail transi-
tion that ctrl can take (if δ > 0) ensures that env can
assign a truth value to a proposition instantaneously
after the execution of the observation time point (oth-
erwise, ctrl could trivially move to goal).
Also, when env’s sequence of “simultaneous”
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
130

transitions completes, ˆc equals the time of the most
recent execution (e.g., last(OccTP) + 3). In addi-
tion, for each newly executed time-point C, the clock
clk[C] is reset xtd[C] is set to >, SysTrace[C] is set to
SysTrace[A] and Avail[SysTrace[C]] = >. Since clk[C]
is reset only once, ˆc − clk[C] remains fixed forever.
Instead, suppose that ctrl has decided to commit
a set of users to execute a set of control time points
before env executes his, say at time last(OccTP) + 2.
This situation results in ctrl taking the gain tran-
sition to take back control and then, once in its lo-
cation, instantaneously commit the users to execute
the time points at that time, blocking all users exe-
cuting an activation time point, and immediately re-
turning to the env location by means of the pass
transition. Since the location of ctrl is urgent, ˆc =
last(OccTP) + 2 when the pass transition is taken.
This sequence of transitions corresponds to the par-
tial outcome in Definition 7 (cases 3-4) where ∆
ctrl
=
(t, {(u
1
,X
1
),.. . , (u
n
,X
n
)}), t = last(OccTP) + 2, and
for each (u,X) ∈ ControlTP (of ∆
ctrl
), u ∈ A(X).
Moreover, if env chooses to instantaneously exe-
cute some contingent time point at the same time
last(OccTP) + 2, that will correspond to an instanta-
neous reaction.
Finally, if at time last(OccTP), ctrl and env
both decide to execute some time points at time
last(OccTP) + 1, then the ACTN semantics (inherit-
ing the CSTNU semantics) ensures that ctrl’s time
points are executed first, and that env is able to in-
stantaneously react if it decides to do so (equivalent
to ctrl’s transitions having priority over env’s). As
soon as the execution returns to the location of env,
the ˆc will still be last(OccTP) + 1 (because, again,
time has not elapsed at ctrl). Since, in all cases, the
resulting state of the TGA satisfies the desired invari-
ant property, the result is proven.
Theorem 3. Let S be any ACTN, G be the encoding
of S , and σ
G
be a winning TGA counter-strategy for
ctrl. Then there is an equivalent RTED-based strat-
egy σ
ctrl
for ctrl that will ensure the satisfaction of
all authorization constraints in S whatever the contin-
gent durations and truth value assignments.
Proof. If S, G, σ
G
are as assumed, then σ
G
: Loc ×
V → Act ∪ wait, with Act the set of ctrl’s actions
(equivalently the set of uncontrollable transitions) and
V abstracts the internal state of the TGA.
Suppose the TGA has just got into the state
(env,V ). As we have already noted, for any time
point X, associated clock clk[X] and Boolean vari-
able xtd[X], we have: xtd[X] = ⊥, clk[X] = ˆc, and
SysTrace[X] = −1 before X executes, and xtd[X] = >,
clk[X] < ˆc, and SysTrace[X] = u after X executed. For
each observation time point P?, the associated propo-
sition modeled by prop[p] is 0 (i.e., unknown) before
P? executes, and either 1 (i.e., >) or −1 (i.e., ⊥) after
P? executed. Thus, V specifies a partial schedule.
Now, suppose that last(OccTP) < ˆc (i.e., that
some positive time has elapsed since the last execu-
tion event in P S). If nothing has happened, it means
that there has been a sequence of gain and pass
transitions going back and forth between env’s and
ctrl’s locations. In such a loop, ctrl has not ex-
ecuted any control point, and env has just waited.
Let (env,V
0
) be the state immediately preceding such
loop. Then, for some positive ε > 0, all the clocks
in V equal those in V
0
plus ε, and by construction,
last(OccTP) refers to the clocks in V
0
. We abuse no-
tation and write V + k meaning that all values of the
clocks in V are augmented by k. Next, let d = min{d |
σ
G
(env,V
0
+ d) 6= wait ∧ σ
G
(env,V
0
+ d) 6= pass}
be the minimum time that can elapse from V be-
fore the strategy σ
G
recommends a transition dif-
ferent from gain and pass, and let V
0
= V
0
+ d.
The unique sequence of execution transitions at ctrl
is τ
1
= σ
G
(ctrl,V
0
),.. . , τ
n
= σ
G
(ctrl,V
n
), where
each V
i+1
= V
i
, except for the clk[X] with X the time
point executed by τ
i
. The termination of this sequence
of transitions is guaranteed since time points are finite
and can only be executed once. If τ
n
is the last execu-
tion transition, then pass = σ
G
(ctrl,V
n
). That tran-
sition leads back to the state (env,V
n
), where V
n
is the
same as V
0
, except that the clocks for the time points
executed by the transitions, τ
1
,. . . , τ
n
, are all 0 in V
n
.
Next, let t be the time at which σ
G
recommends
ctrl a non-trivial transition, and ControlTP be the
set of time-points corresponding to the execution tran-
sitions, τ
1
,. . . , τ
n
. Then (t, ControlTP) is a ∆
ctrl
corresponding to what the strategy recommends at
(env,V
0
). Note that env may decide to instanta-
neously react by executing some contingent points at
time t too, an outcome that is prevented by the exe-
cution semantics for ACTNs (Definition 7, cases 3-
4). Finally, env may decide to intervene before time
t arrives, by executing one or more contingent time-
points and effectively generating a new partial sched-
ule P S
0
. In that case, the same procedure could be ap-
plied to PS
0
to generate an appropriate ∆
ctrl
. Since
the guard on the transition from env to ctrl requires
a positive time delay, that ∆
ctrl
is properly prohibited
from any kind of instantaneous reaction (by ctrl).
This procedure gives a mapping from any (env,V )
state that is reachable following σ
G
. The sequences
of partial schedules generated by following the RT-
EDs correspond to runs that can be produced by σ
G
.
Thus, the complete schedules generated by the RT-
EDs satisfy all authorization constraints.
Access Controlled Temporal Networks
131
