
Modified Krill Herd Optimization Algorithm using Focus Group Idea
Mahdi Bidar
1
, Edris Fattahi
2
, Malek Mouhoub
1
and Hamidreza Rashidy Kanan
3
1
Department of Computer Science, University of Regina, Regina, Canada
2
Department of Computer and Information Technology Engineering, Islamic Azad University, Marivan, Iran
3
Department of Computer Engineering, Shahid Rajaee Teacher Training University, Tehran, Iran
Keywords:
Metaheuristics, Evolutionary Computation, Krill Herd Algorithm, Exploration, Exploitation.
Abstract:
Krill Herd algorithm is one of most recently developed nature-inspired optimization algorithms which is in-
spired by herding behavior of krill individuals. In order to improve the performance of this algorithm to deal
more effectively with high dimensional numerical functions, we propose a new method, called Focus Group
idea to modify the solutions found by searching agents in group cooperation. In order to evaluate the effect of
the proposed method on the performance of the Krill Herd algorithm, we conducted experiments on a set stan-
dard benchmark functions. The obtained results demonstrate the ability of the proposed method to improve
the performance of the Krill Herd optimization algorithm.
1 INTRODUCTION
Recently the world has been grappling with high di-
mensional and complex real world optimization prob-
lems. The urgency for solving these challenging prob-
lems has caused heated discussion among scientist
in different areas (Yang and Press, 2010). It has
been proven that due to the high dimension of these
problems, the logical and classical methods cannot
come in useful, as using them is so time consum-
ing and in some cases inapplicable. Due to men-
tioned reasons, the meta-heuristic means which are
inspired by physical or biological processes would
be among the appropriate options. These evolution-
ary techniques have earned much popularity due to
their success in dealing with hard to solve problems
(Yang and Press, 2010). Although they do not guar-
antee finding the optimal solution, they have shown
impressive performance in accessing acceptable so-
lutions in very efficient time. Two main compo-
nents of each meta-heuristic algorithm are explo-
ration and exploitation. Each meta-heuristic algo-
rithm uses a combination of these two components
which is the main reason why the related searches
are so powerful. Evolutionary techniques include Ge-
netic algorithms (GAs) which was developed based
on Darwinian theory (Goldberg and Holland, 1988;
Mitchell, 1998), Ant Colony Optimization (ACO), in-
spired by collective foraging behavior of ants (Dorigo
et al., 1996), PSO, inspired by bird flocking and fish
schooling (Kennedy, 2011), vector-based evolution-
ary algorithm proposed by Storn (Storn and Price,
1995), Artificial Bee Colony (ABC), a further devel-
opment of ACO, proposed by Karaboga (Karaboga,
2005), Firefly Algorithm (FA), inspired by fireflies’
behavior in emitting light in order to attract other fire-
flies (Yang, 2010a), Gravitational Search Algorithm
(GSA), introduced based on the law of gravity and
mass interactions (Yang, 2010a), Bat-Inspired algo-
rithm (Rashedi et al., 2009) and Cuckoo Optimization
Algorithm (COA), inspired by eggs laying and breed-
ing characteristics of cuckoos (Yang, 2010b). Due to
their ability to deal with hard optimization problems,
these solving methods have been widely applied to
different areas including pattern recognition, control
objectives, image processing and filter modeling.
Krill Herd (KH) is a nature-inspired optimization
algorithm which was developed based on herding be-
havior of krill in the nature (Bhandari et al., 2014).
The minimum distances from the food and the high-
est density of the krill herds are considered as objec-
tives of the KH algorithm. Although meta-heuristic
algorithms are able to deal with different optimiza-
tion problems, enhancing and improving their perfor-
mance to deal with wider range of problems or be-
come able to deal with specific applications is an open
issue. Various ideas and methods such as chaotic
sequences or fuzzy methods have been applied and
combined with meta-heuristic algorithms to do so. In
this regard, we introduce a new method called Focus
Bidar M., Fattahi E., Mouhoub M. and Rashidy Kanan H.
Modified Krill Herd Optimization Algorithm using Focus Group Idea.
DOI: 10.5220/0006187904650472
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 465-472
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
465

Group to enhance the performance of the Krill Herd
algorithm when solving high dimensional numerical
functions. Focus Group is a method which tries to
modify the solutions found by group’s members in
a group discussion. Despite the other evolutionary
algorithms which concentrate on the use of the best
solutions, this method enables algorithms to consider
all the solutions found to reach the optimal one. To
evaluate the effect of this new method in improving
the performance of Krill Herd optimization algorithm,
we applied it to a set of standard benchmark func-
tions. The obtained results demonstrate the ability of
the proposed method in enhancing the performance of
Krill Herd algorithm.
2 KRILL HERD ALGORITHM
Krill Herd (KH) is a recently proposed meta-heuristic
optimization algorithm which was inspired by Krill’s
herding behavior to solve global optimization prob-
lems (Gandomi and Alavi, 2012). The fitness func-
tion of each krill individual is defined as its distances
from food and highest density of the swarm. The
time-dependent position of an individual krill is influ-
enced by the following three main factors: the move-
ment induced by other krill individuals, the foraging
activities and the random diffusion. When hunters at-
tack krill, they remove krill individuals and this lead
to diminish their density. Formation of the krill herd
depends on many parameters. Increasing krill den-
sity and reaching food are considered as two main ob-
jectives of herding behavior after reducing krill den-
sity which these two lead the krill individuals to herd
around the global optima. In this process, an individ-
ual krill moves toward the fittest individual that has
found the best solution when it searches for the high-
est density and food. So the closer the distance to the
high density and food, the better value is produced
by the objective function. Predators hunt individuals
and cause reduction of the average krill density, and
distances the krill swarm from the food location. In
the Krill Herd algorithm presented in Figure 1, the
fitness of each individual is evaluated considering the
distance of that individual from the food and from the
highest density of the krill swarm.
For n dimensional decision space, the Krill Herd
algorithm conforms to the following Lagrangian
model:
dX
i
d
t
= N
i
+ F
i
+ D
i
(1)
where N
i
is the motion induced by other krill individ-
uals in the herd, F
i
is the foraging motion and D
i
is
the physical diffusion of the ith krill individuals. The
Krill Herd Optimization Algorithm
begin
Initial parameter setting
Pre-calculation
Initial krill positions
For each iteration
Population evaluation
For each krill
Calculation of Best krill effect
Calculation of Neighbors Krill effect
Movement Induced
Calculation of food attraction
Calculation of best position attraction
Foraging motion
Physical diffusion
Motion process
Crossover and mutation
Update krill’s position
end
Update the current best
end
Figure 1: The pseudo-code of Krill Herd optimization algo-
rithm (Gandomi and Alavi, 2012).
movement of i-th krill can be considered as shown in
(2) in motion induced by other krill individuals.
N
new
i
= N
max
α
i
+ w
n
N
old
i
(2)
where
α
i
= α
local
i
+ α
t arget
i
(3)
where N
max
is the maximum induced speed, w
n
is
the inertia weight of the motion induced, N
i
old
is the
last motion induced and α is direction of movement.
α
i
local
is the local effect caused by neighbors and
α
i
target
is target direction effect caused by the best in-
dividual. The effect of the neighbors can be assumed
as an attractive/repulsive tendency between the indi-
viduals for a local search which is formulated as fol-
low:
α
local
i
=
NN
∑
j=1
ˆ
K
i, j
ˆ
X
i, j
(4)
where
ˆ
X
i j
=
X
j
−X
i
X
j
− X
i
k
+ ε
(5)
And also
α
t arg et
i
= C
best
ˆ
K
i,best
X
i,best
(6)
where C
best
is the effective coefficient of the krill in-
dividual with the best fitness to the i-th krill individual
and defined as follow:
C
best
= 2
rand +
I
I
max
(7)
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
466

where rand is a random values between 0 and 1 and
it is for enhancing exploration, I is the actual itera-
tion number and Imax is the maximum number of it-
erations. The foraging motion is proportional to two
main parameters, food location and previous experi-
ence about food location. This motion can be formu-
lated as follow:
F
i
= V
f
β
i
+ ω
f
F
old
i
(8)
where
β
i
= β
f ood
i
+ β
best
i
(9)
V
f
is the foraging speed, ω
f
is the inertia weight of
the foraging motion, F
old
i
is the last foraging motion
and β
f ood
i
is food attractive and β
best
i
is the effect of the
best fitness of the i-th krill so far. Physical diffusion
of krill can be considered as (10):
D
i
= D
max
(1 −
I
I
max
)δ (10)
where D
max
is the maximum diffusion speed, δ is the
random directional vector, I and I
max
are i-th and max-
imum iteration number. The location vector of krill
during the interval t to t+1 is given by (11):
X
i
(t + ∆t) = X
i
(t) + ∆t
dX
i
d
t
(11)
where ∆t is an important constant that should be care-
fully set based on the optimization problem. After
Motion calculation, to improve the performance of
KH algorithm, crossover and mutation operators are
added to algorithm.
3 FOCUS GROUP
The Focus Group (FG) idea is inspired by the behav-
ior of the members of a group in sharing, correct-
ing and improving their ideas on a specific topic until
reaching the best one. More precisely, FG consists
of some people discussing a given subject and shar-
ing ideas in order to reach the best solution to a given
problem. The main characteristic of the FG is its abil-
ity of producing and improving ideas or data based
on cooperation of its members. This approach could
be considered as an optimization operator, used for
optimization purposes. In a FG, each member’s idea
will be taken into consideration by all members and
will affect their idea. After repetitions of this proce-
dure, the best and the most conceivable choice will be
reached. It is worth mentioning that another charac-
teristic of a FG is that, at each time just one member is
allowed to talk and this is mainly due to importance of
hearing all ideas with care in order to take them into
account. While different, all these ideas should be
valued. Better ideas possess higher values and have
greater impact on the other members’ ideas.
Referring to KH optimization algorithm proposed
by Gandomi (Gandomi and Alavi, 2012), when preda-
tors such as seabirds, penguins and seals attack krill,
they remove krill individuals which results in reduc-
tion in the krill density and distancing them from
food. So reformation of the krill’s herd after reduc-
tion of krill density depends on many factors. This
process (herding of the krill individuals) is a multi-
objective process which follows two main goals: in-
creasing krill density and reaching food. To achieve
the first goal, krill individuals make their ultimate ef-
fort and try to increase and maintain the herd density
and move due to their mutual effects. The movement
direction of each krill individual, α
i
, is influenced
by local swarm density as local effect, target swarm
density as target effect and repulsive swarm density
known as repulsive effect. This movement is as fol-
low:
N
new
i
= N
max
α
i
+ w
n
N
old
i
(12)
where
α
i
= α
local
i
+ α
t arg et
i
(13)
where α
i
local
is the effect caused by individual neigh-
bors and α
i
target
is the effect caused by the best krill
individual. This means that the movement direction
of krill individuals is influenced by their neighbors
and the best individual. According to the focus group
idea in a group, all members have their own impact
on the other members’ ideas in a way that the best
krill individual has greatest impact and the worst krill
has the least impact on the other members’ ideas. So
contrary to the Gandomi’s idea in the Krill Herd op-
timization algorithm about the movement of the krill
individuals, the focus group idea points to the fact that
the movement of each krill individual should be influ-
enced by all krill individuals. However, individuals
with higher fitness have higher effects and individu-
als with lower fitness have lower effects. So, fitting
the focus group description, equation (13) should be
reformulated as follow:
α
i
=
N
∑
j=1
(C
j
ˆ
K
i, jbest
ˆ
X
i, jbest
) (14)
where
ˆ
X
i, jbest
= (
X
j,ibest
−X
i
X
j,ibest
−X
i
+ ε
) (15)
and
ˆ
K
i, jbest
=
K
i
−K
j,ibest
K
worst
−K
best
(16)
where N is the population size, X
i
is the current lo-
cation of i-th individual, X
j,ibest
is the best location
Modified Krill Herd Optimization Algorithm using Focus Group Idea
467

visited by j-th individual in all iterations and C
j
is
the coefficient effect of i-th krill individual which is
the exponentially distributed random number. The
larger random numbers are allocated to individuals
with higher fitness and the smaller ones are allo-
cated to the individuals with lower fitness. Also K
j,ibest
equals to best fitness of j-th individual in all it-
erations and K
i
equals to fitness of i-th individual, K
best
and K
worst
are the best and worst fitness achieved
by all krill individuals.
4 EXPERIMENTATION
In order to evaluate the performance of the proposed
algorithms, we applied it to a set of standard bench-
mark functions listed in Table 1. These benchmarks
include high dimensional functions which are diffi-
cult to solve due their dimension (Fister et al., 2013)
and are being used most frequently by the researchers
to examine the performance of the different optimiza-
tion algorithms. If we exclude Sphere and DixonPrice
which are unimodal functions, the rest are multimodal
functions. In spite of unimodal functions which have
one local optimum, multimodal functions have many
local minimum points with a risk of being trapped in
them. In Table 1, n is the dimension of the functions,
Search Space is the problem space which is a subset
of R
n
. The Global Minimum is the minimum value
of the functions which are zero for all functions ex-
cept for Michalewicz function (Its minimum point is
-9.66). The dimension for F1 to F9 functions is con-
sidered 20 and for F10 is considered 10. Below is the
description of the benchmark functions we have used
in our experiments. More details can be found in (Ali
et al., 2005).
F1. Ackley function: This is a popular test problem
for evaluating the performance of the optimization
methods. Its many local optimum solutions chal-
lenge the performance of the optimization meth-
ods by posing a risk on them, to be trapped in one
of local optimum solutions and this is specially
the case for the hill climbing methods. Ackley
is continuous, differentiable, non-separable, scal-
able and multimodal. The global minimum of the
function is f (x
?
) = 0 with corresponding solution
x
?
= (0,...,0). The test domain is 32.768 ≤ x
i
≤
32.768.
F2. Griewank function: This function has many local
optimum solutions that are regularly distributed in
the problem space. This is also a non-separable,
scalable and a differentiable function. Its global
optimum solution is f (x
?
) = 0 with correspond-
ing solution x
?
= (0, . . . , 0). The domain of test is
600 ≤ x
i
≤ 600.
F3. Levy function: Levy is a continuous optimiza-
tion problem with several local optimum solution
distributed in the problem space. It has global op-
timum solution f (x
?
) = 0 which is located at x
?
=
(1,...,1). This problem is subject to 10 ≤x
i
≤10.
F4. Rastrigin function: Rastrigin is a continuous
multimodal function with many local optimum
solution distributed in the search space. It is a
difficult problem to solve due to its large search
space and large number of local optimum solu-
tions. Its global optimum solution is f (x
?
) = 0
with corresponding zero vector x
?
= (0, . . . , 0).
The test domain is 5.12 ≤ x
i
≤ 5.12.
F5. Schwefel function: Schwefel belongs to contin-
uous multimodal class of test functions. It is also
differ-entiable, separable and scalable functions.
Its many local optimum solutions make it gener-
ally difficult solution to solve. Its global minimum
is f (x
?
) = 0 which is located at x
?
= (0, . . . , 0).
The problem constraint is 500 ≤ x
i
≤ 500.
F6. Dixon Price function: This function is continu-
ous, differentiable, non-separable and unimodal
function. It has global minimum f (x
?
) = 0 which
is located at x
?
= (2(
2
i
−2
2
i
)) for i = 1 ...n, where n
is the dimension of the problem. The test domain
is 10 ≤ x
i
≤ 10.
F7. Rosenbrock function: Rosenbrock is a popu-
lar function for gradient-based optimization al-
gorithms. It is continuous, differentiable, non-
separable and unimodal function. It has global
minimum f (x
?
) = 0 which is located in nar-
row valley. The corresponding solution is x
?
=
(1,...,1) and the problem constraint is 5 ≤ x
i
≤
10.
F8. Sphere function: Sphere is a poplar test function
which is used most frequently by the researchers
for examining the performance of the optimiza-
tion methods. This function is continuous, differ-
entiable, separable and unimodal test function. Its
global optimum solution is f (x
?
) = 0 with corre-
sponding solution x
?
= (0,...,0), where 5.12 ≤
x
i
≤ 5.12.
F9. Powell function: Powell function is continuous,
differentiable, separable and unimodal function.
It has global optimum f (x
?
) = 0 which located
at x
?
= (3, 1, 0, 1 . . . , 3, 1, 0, 1) where 4 ≤ x
i
≤ 5.
F10. Michalewicz function: This function is contin-
uous multimodal function. It has global minimum
f (x
?
) = 9.66 for 10 dimension version (n = 10).
This problem is subject to 0 ≤ x
i
≤ π.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
468
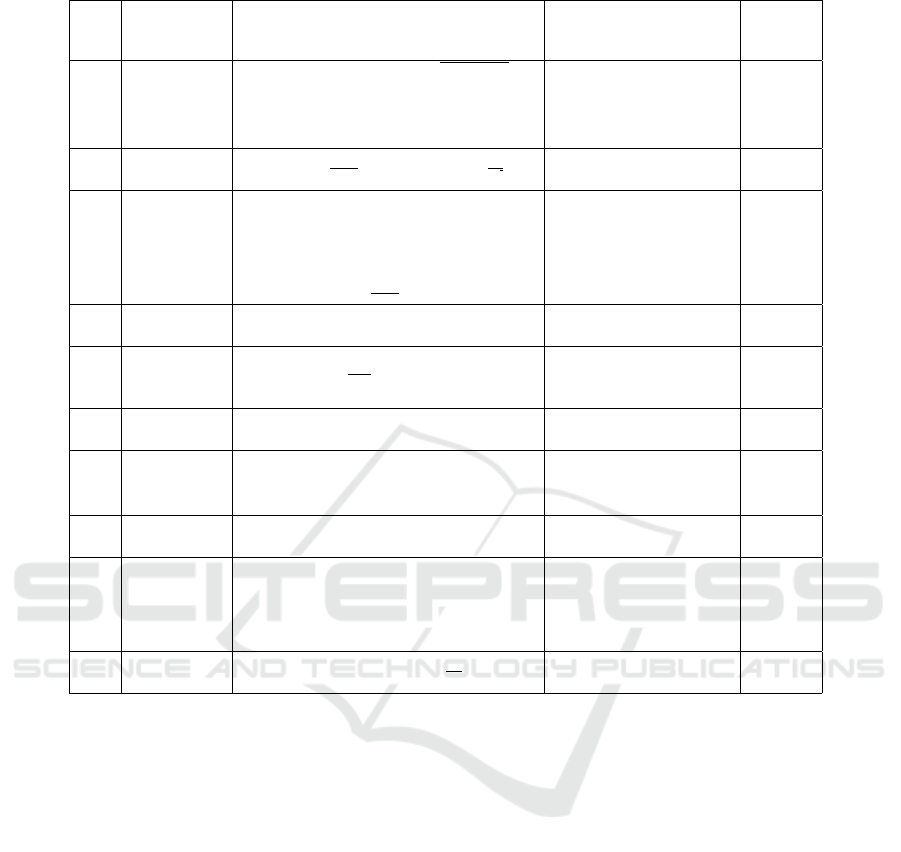
Table 1: The standard benchmark functions used in our experiments.
ID Name Function Domain Global
Mini-
mum
F1 Ackley
f (x) = −20 exp
−0.2
r
n
−1
n
∑
i=1
x
2
i
−
exp
n
−1
n
∑
i=1
cos(2πx
i
)
+ 20 + e
x
i
∈ [−32.768, 32.768] 0
F2 Griewank f (x) = 1 +
1
4000
n
∑
i=1
x
2
i
−
n
∏
i=1
cos
x
i
√
i
x
i
∈ [−600, 600] 0
F3 Levy
f (x) = sin
2
(πω
1
) +
n−1
∑
i=1
(ω
i
−1)
2
∗
1 + 10sin
2
(πω
i
+ 1)
+(ω
n
−1)
2
1 + sin
2
(2πω
n
)
,
where ω
i
= 1 +
x
i
−1
4
, f or all i = 1,.. .,n
x
i
∈ [−10, 10] 0
F4 Rastrigin f (x) = 10n +
n
∑
i=1
(x
2
i
−10 cos(2πx
i
)) x
i
∈ [−5.12, 5.12] 0
F5 Schwefel
f (x) = 418.9829n−
n
∑
i=1
x
i
sin
p
|
x
i
|
x
i
∈ [−500, 500] 0
F6 Dixon Price f (x) = (x
1
−1)
2
+
n
∑
i=2
i
2x
2
i
−x
i−1
2
x
i
∈ [−10, 10] 0
F7 Rosenbrock f (x) =
n−1
∑
i=1
100
x
i+1
−x
2
i
2
+ (x
i
−1)
2
x
i
∈ [−5, 10] 0
F8 Sphere f (x) =
n
∑
i=1
x
2
i
x
i
∈ [−5.12, 5.12] 0
F9 Powell f (x) =
n/4
∑
i=1
(x
4i−3
+ 10x
4i−2
)
2
+
5(x
4i−1
−x
4i
)
2
+(x
4i−3
+ 2x
4i−1
)
4
+ 10(x
4i−3
−x
4i
)
4
x
i
∈ [−4, 5] 0
F10 Michalewicz f (x) = −
n
∑
i=1
sin(x
i
)sin
20
ix
2
i
π
x
i
∈ [0,π] -9.66
F11. Colville function: Colville function is continu-
ous, differentiable, non-separable and multimodal
function. It has several local minimum solutions
which make it tricky and hard to find global min-
imum. Its global minimum is f (x
∗
) = 0 which is
located at x
∗
= (1,...,1). The problem domain is
−10 ≤ x
i
≤ 10.
F12. Shubert function: Shubert function is
continuous, differentiable, separable and
multimodal function. It has 18 global
minimum some of which are located at
(−1.4251,−7.0835), (−7.0835, −7.7083),
(5.4828,4.8580). Its global minimum
is f (x
∗
) = −186.73. The test domain is
−10 ≤ x
i
≤ 10.
F13. Six-hump camel function: This function is con-
tinuous, differentiable, non-separable and mul-
timodal function. It has two global opti-
mum f (x
∗
) = −1.0316 which are located at
(−0.0898, 0.7126), (0.0898,−0.7126). This
function is subject to −10 ≤ x
i
≤ 10.
F14. Bohachevsky1 function: This function is con-
tinuous, differentiable, separable and multimodal.
Its global optimum is f (x
∗
) = 0 is located at
(0, 0). The test domain is−100 ≤x
i
≤ 100.
F15. De Jong N.5 function: This function is contin-
uous multimodal function with many sharp drops
on an almost flat surface. The global minimum
of the function is f (x
∗
) = 0.99 where −65.536 ≤
x
i
≤ 65.536.
F16. Easom function: Easom function is two-
dimensional function in domain −100 ≤ x
i
≤
100. This function belongs to continuous, dif-
ferentiable, separable and multimodal function
class. Its global minimum is f (x
∗
) = −1, located
at(π, π).
F17. Matyas function: Matyas function is continu-
ous, differentiable, non-separable unimodal func-
tion. Its global minimum is f (x
∗
) = 0 located at
(0, 0). The test domain is −10 ≤ x
i
≤ 10.
F18. Beale function: This is continuous, differen-
Modified Krill Herd Optimization Algorithm using Focus Group Idea
469
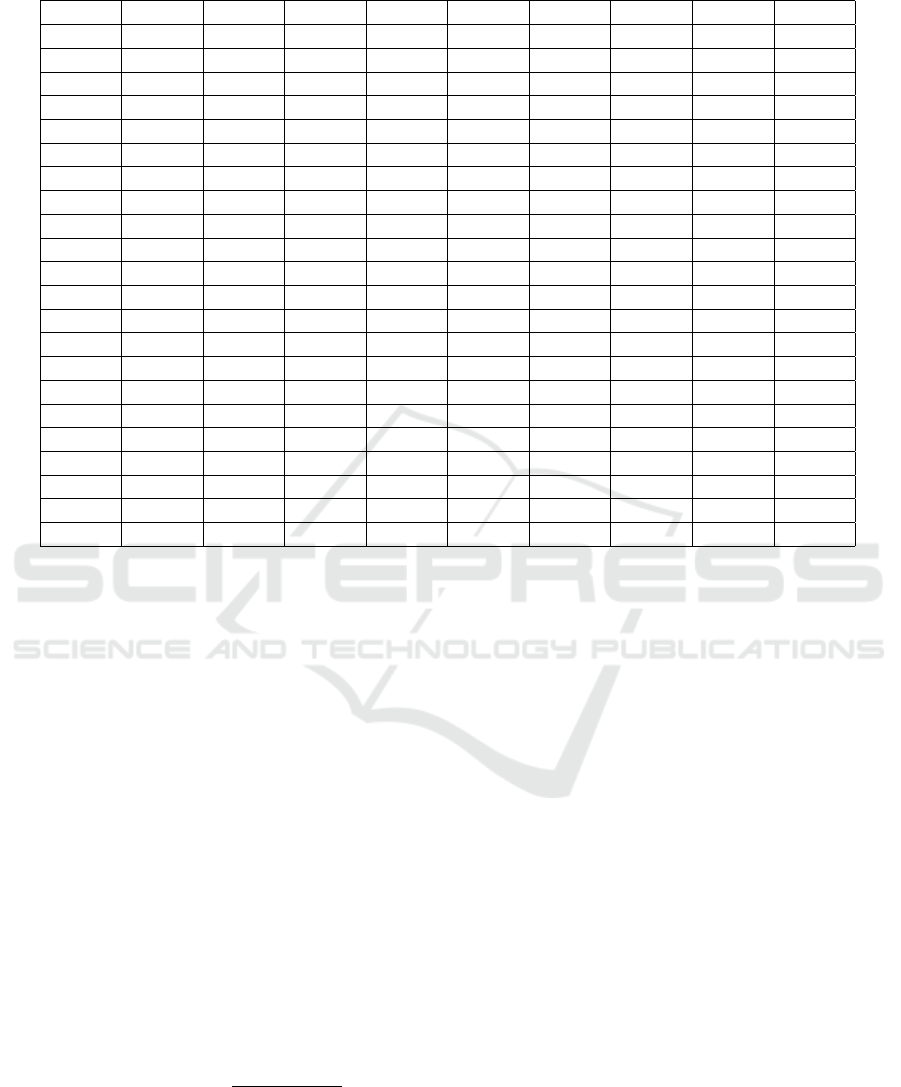
Table 2: The average of the normalized results of the proposed KHFG optimization algorithms and several famous meta-
heuristic optimization algorithms in 50 trials for the benchmark functions.
ID KHFG KH PSO GA ES CS ACO ABC TLBO
F1 0.97 0.94 0.89 1 0.77 0 0.99 1 1
F2 0.99 0.99 1 0.99 0 0.98 0.98 0.99 0.99
F3 0.98 0.36 0.68 0.36 1 0 0.44 0.86 0.37
F4 1 0.99 0.97 0.99 0 0.93 0.97 0.97 0.98
F5 0.21 0.3 0 1 0.99 0.33 0.99 0.24 0.25
F6 1 0.87 0.21 0.01 0 0.46 0 0.99 0.99
F7 0.72 0.58 0.9 1 0.29 0 0.99 0.99 1
F8 1 1 0.99 0.99 0 0.99 1 1 1
F9 1 0.92 0.24 0.06 0 0.9 0 0.99 1
F10 0.96 0.8 0.69 0 1 1 0.13 0.36 0.36
F11 0.99 0.98 0.99 0.97 0 1 0.98 0.99 0.99
F12 0.99 0.99 0.66 0 0.49 1 0 0.99 0.99
F13 1 1 1 0.77 0 1 0.93 0.99 0.99
F14 0.99 0.99 0 0.99 0.99 1 0.92 0.85 0.85
F15 0.99 1 0.97 0 0.99 0.62 0.01 0.75 0.75
F16 1 0.99 0.5 0.5 0 1 0.99 0.99 0.99
F17 1 0.99 0.54 0.53 0 0.99 0.96 1 1
F18 1 1 0 0.99 0.99 0.84 0.99 1 1
F19 0.57 1 1 0 1 0.99 1 1 1
F20 1 1 0.99 0.76 0 1 0.07 1 1
SUM 18.4 17.76 13.47 12.21 15.11 8.8 13.41 18.04 17.57
Rank 1 3 6 8 5 9 7 2 4
tiable, non-separable and unimodal test function.
The global minimum of the function is f (x
∗
) = 0
located at (3, 0.5)t. This function is subject to
−4.5 ≤ x
i
≤ 4.5.
F19. Goldstein Price function: Goldstein Price
is continuous, differentiable, non-separable and
multimodal function. Its global optimum is
f (x
∗
) = 3 which is located at (−1, 0) where
−2 ≤ x
i
≤ 2.
F20. Forrester’s function: This function is one-
dimensional, continuous and multimodal func-
tion. It has a global optimum f (x
∗
) = −6.0207
at (0.7572). The test domain is 0 ≤ x
i
≤ 1.
Several experiments with have been be carried out
to obtain the real performance of an algorithm. The
results are obtained on 50 trials with different initial-
ization conditions. In all the experiments, the number
of iterations and the number of krill individuals are set
to 200 and 25 respectively. The results are normalized
using (5).
X
i,normalized
= 1 −
(X
i
−X
min
)
(X
max
−X
min
)
(17)
where, X
i,normalized
is the normalized value of solution
i, X i is the fitness value of solution i, X
min
and X
max
are the minimum and the maximum fitness value of
the found solutions respectively.
KHFG is compared with the following eight well-
known meta-heuristic optimization algorithms: Ge-
netic Algorithm (GA), Particle Swarm Optimization
(PSO), Evolution Strategy (ES), Cuckoo Search (CS),
Krill Herd (KH), Ant Colony Optimization (ACO),
Artificial Bee Colony (ABC) and Teaching-Learning
Based Optimization (TLBO). The obtained results
of the proposed FG optimization algorithms together
with the results of the mentioned meta-heuristic opti-
mization algorithms are listed in Table 2. It should be
mentioned that these obtained results are the average
of the normalized results on 50 trials.
In order to make a fair comparison of the proposed
KHFG and the mentioned optimization algorithms,
the normalized results are summed and ranked. As
we can easily see, KHFG optimization algorithm out-
performs the other methods in 10 out of 20 functions.
In order to compare the performance of differ-
ent algorithms different methods such as Chess Rat-
ing System and Wilcoxon Rank Sum Tests can be
used. In this experiment Nonparametric Wilcoxon
Rank Sum Tests is used. We conduct this experi-
ments on the results achieved by the proposed algo-
rithm and other mentioned meta-heuristic algorithms
on presented benchmark functions and the results of
this experiments is presented in Table 1. The results
of this experiment are presented with P-value and h
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
470
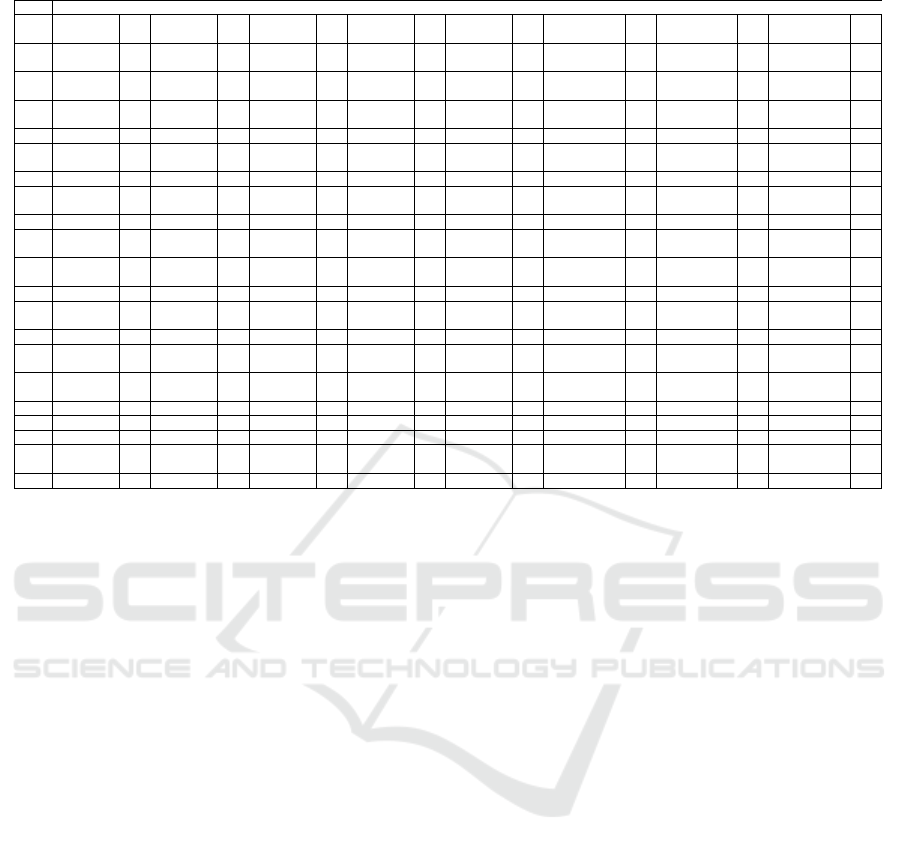
Table 3: Statistical Comparison between KHFG and the other five algorithms.
ID KH PSO GA ES CS ACO ABC TLBO
p-
h
p-
h
p-
h
p-
h
p-
h
p-
h
p-
h
p-
h
value value value value value value value value
F1 4.85E-18 1+ 3.68E-18 1+ 5.12E-12 1- 3.68E-18 1+ 4.59E-16 1+ 1.14E-02 1- 2.14 E-02 1- 2.14 E-02 1-
F2 2.21E-14 1- 2.81E-15 1- 3.68E-18 1+ 3.68E-18 1+ 4.14E-11 1+ 1.23E-02 1+ 6.8 E-03 1- 5.8 E-03 1-
F3 1.92E-12 1+ 4.19E-12 1+ 3.68E-18 1+ 2.51E-16 1- 3.68E-18 1+ 5.44E-01 1+ 1.215 E-01 1+ 6.098 E-01 1+
F4 2.11E-04 1+ 3.51E-05 1+ 3.68E-18 1+ 2.11E-19 1+ 3.68E-18 1+ 3E-0.2 1+ 2.41 E-01 1+ 1.11 E-02 1+
F5 4.73E-18 1- 3.68E-18 1+ 2.48E-21 1- 5.26E-21 1- 8.27E-21 1- 7.77E-01 1- 3.28 E-01 1- 3.92 E-02 1-
F6 1.12E-06 1+ 3.68E-18 1+ 4.64E-08 1+ 6.22E-14 1+ 4.14E-06 1+ 1 1+ 4.00E-04 1+ 4 E-04 1+
F7 2.87E-03 1+ 4.58E-04 1- 6.98E-09 1- 8.40E-06 1+ 1.32E-06 1+ 2.73E-01 1- 2.82 E-01 1- 2.827 E-01 1-
F8 6.71E-01 0 1.41E-01 0 8.14E-12 1+ 3.68E-18 1+ 8.67E-02 1+ 0 0 0 0 0 0
F9 2.37E-01 1+ 4.46E-01 1+ 3.68E-18 1+ 3.68E-18 1+ 3.68E-18 1+ 9.946 E-01 1+ 6 E-04 1+ 5.4 E-03 1-
F10 7.96E-15 1+ 3.26E-17 1+ 3.68E-18 1+ 2.21E-21 1- 3.51E-05 1- 8.309 E-01 1+ 5.99 E-01 1+ 5.995 E-02 1+
F11 9.26E-01 1+ 7.68E-03 0 1.52E-05 1+ 3.68E-18 1+ 3.16E-01 0 1.65 E-02 1+ 1.8 E-03 1+ 1.8 E-03 1+
F12 1.45E-02 1- 1.29E-02 1+ 1.38E-04 1+ 1.64E-03 1+ 3.62E-02 1- 9.999 E-01 1+ 9 E-04 1+ 8 E-04 1+
F13 8.47E-05 0 9.34E-04 0 2.32E-08 1+ 3.23E-09 1+ 5.12E-01 0 7.00E-02 1+ 0 1+ 0 1+
F14 2.60E-17 1+ 3.68E-18 1+ 3.68E-18 1+ 1.12E-01 0 4.85E-21 1- 8.00E-02 1+ 1.453 E-01 1+ 1.404 E-01 1+
F15 5.97E-01 1- 3.68E-18 1+ 4.31E-15 1+ 1.18E-01 0 3.07E-21 1+ 9.798 E-01 1+ 2.333 E-01 1+ 2.374 E-01 1+
F16 4.14E-04 1+ 3.68E-18 1+ 4.14E-04 1+ 5.22E-11 1+ 9.85E-01 0 1 E-02 1+ 5 E-04 1+ 5.5 E-03 1+
F17 1.51E-02 1+ 3.68E-18 1+ 3.68E-18 1+ 3.68E-18 1+ 8.18E-15 1+ 4 E-02 1+ 0 0 0 0
F18 2.07E-01 0 4.08E-02 1+ 8.46E-03 1+ 3.68E-18 1+ 6.24E-10 1+ 1 E-02 1+ 0 0 0 0
F19 2.18E-02 1- 5.45E-01 1- 7.31E-03 1- 3.43E-19 1- 6.14E-19 1- 4.247 E-01 1- 4.247 E-02 1- 4.247 E-01 1-
F20 6.70E-01 0 3.68E-18 1+ 3.68E-18 1+ 3.68E-18 1+ 1.45E-01 0 9.3 E-01 1+ 0 0 0 0
which help us to find out whether there is signifi-
cant difference between the performances of two al-
gorithms. In this experiment h can get three differ-
ent values, 1
+
, 0 and 1
−
and each value indicates
different fact. h=1 indicates that the performances
of two compared algorithm is significantly different
with 95% confidence. 1
+
shows that an algorithm has
higher performance compared with another algorithm
in the comparison and 1
−
vice versa. And 0 indicates
that there is no statistical difference.
Table 3 shows the results of Null Hypothesis Sig-
nificance Testing which has been done by Nonpara-
metric Wilcoxon Rank Sum Tests on the proposed al-
gorithm and other mentioned algorithms in MATLAB
2010. It also indicates that in most of the experiments
the results achieved by KHFG are comparable with
the results achieved by the other methods. Follow-
ing are some discussion about the results presented in
Table 3.
1. F1 is ackley function. The KHFG algorithm
achieved the third best mean value compared
with those of other algorithms and ranked sec-
ond. There is statistically significant difference
between KHFG algorithm and KH, PSO, CS and
ES. GA, ABC, TLBO have significant perfor-
mance over the KHFG algorithm.
2. F3 is Levy function. The KHFG algorithm
achieved the second best mean value compared
with those of other algorithms and ranked sec-
ond. There is statistically significant difference
between KHFG algorithm and KH, PSO, CS, GA,
ACO, ABC and TLBO. ES has significant perfor-
mance over the KHFG algorithm
3. F8 is Sphere function. The KHFG algorithm
achieved the best mean value compared with
those of other algorithms. There is no statisti-
cally significant difference between KHFG algo-
rithm and KH, PSO, ABC, ACO and TLBO algo-
rithms. There is statistically significant difference
between KHFG algorithm and GA, CS and ES al-
gorithms.
4. F12 is Shubert function. The proposed method
achieved the second best mean value in this ex-
periment. The statistical results show that the
proposed FGKH has significant importance over
PSO, GA, ES, ACO, ABC and TLBO. There is
no significant importance between the proposed
method and KH algorithm. There is only CS al-
gorithm that has significant importance over the
FGKH algorithm.
5. F16 is Easiom test function. The FGKH algorithm
achieved the best results in this experiment among
the mentioned evolutionary techniques. The pro-
posed method has significant importance over al-
most all algorithms except ES algorithm. There is
no significant importance between FGKH and ES
algorithm.
6. F20 is Forrester’s function. The proposed al-
gorithm ranked first in this experiment. It has
Modified Krill Herd Optimization Algorithm using Focus Group Idea
471

also significant importance over PSO, GA, ES
and ACO algorithm. There is no significant im-
portance between FGKH and KH, CS, ABC and
TLBO algorithms.
5 CONCLUSION
This paper introduces a new method called Focus
Group Idea to improve the fitness of the KH algo-
rithm by modifying the solutions found by the search-
ing agents. This idea put the emphasis on utilizing
all members’ solutions with the focus on their fitness.
According to the definition of the Focus Group Idea,
each member can affect the other members’ ideas
considering the quality of its solution. In other words,
the more quality solution it has the more impact it
has on the other members’ ideas (solutions). In order
to evaluate the performance of the proposed method
we experimentally compared KHFG to other well
known evolutionary techniques for solving a set of
standard benchmark functions. The results achieved
by KHFG in comparison with those of the other meth-
ods, demonstrate the ability of proposed method in
improving the performance of the KH algorithm.
REFERENCES
Ali, M. M., Khompatraporn, C., and Zabinsky, Z. B.
(2005). A numerical evaluation of several stochas-
tic algorithms on selected continuous global optimiza-
tion test problems. Journal of Global Optimization,
31(4):635–672.
Bhandari, A. K., Singh, V. K., Kumar, A., and Singh, G. K.
(2014). Cuckoo search algorithm and wind driven op-
timization based study of satellite image segmentation
for multilevel thresholding using kapurs entropy. Ex-
pert Systems with Applications, 41(7):3538–3560.
Dorigo, M., Maniezzo, V., and Colorni, A. (1996). Ant sys-
tem: optimization by a colony of cooperating agents.
IEEE Transactions on Systems, Man, and Cybernet-
ics, Part B (Cybernetics), 26(1):29–41.
Fister, I., Yang, X.-S., and Brest, J. (2013). Modified fire-
fly algorithm using quaternion representation. Expert
Systems with Applications, 40(18):7220–7230.
Gandomi, A. H. and Alavi, A. H. (2012). Krill herd: a
new bio-inspired optimization algorithm. Communi-
cations in Nonlinear Science and Numerical Simula-
tion, 17(12):4831–4845.
Goldberg, D. E. and Holland, J. H. (1988). Genetic al-
gorithms and machine learning. Machine learning,
3(2):95–99.
Karaboga, D. (2005). An idea based on honey bee swarm
for numerical optimization, technical report-tr06, er-
ciyes university, engineering faculty, computer engi-
neering department. Technical report.
Kennedy, J. (2011). Particle swarm optimization. In
Encyclopedia of machine learning, pages 760–766.
Springer.
Mitchell, M. (1998). An introduction to genetic algorithms.
Rashedi, E., Nezamabadi-Pour, H., and Saryazdi, S. (2009).
Gsa: a gravitational search algorithm. Information
sciences, 179(13):2232–2248.
Storn, R. and Price, K. (1995). Differential evolution-a sim-
ple and efficient adaptive scheme for global optimiza-
tion over continuous spaces, volume 3.
Yang, X.-S. (2010a). Firefly algorithm, levy flights and
global optimization. In Research and development in
intelligent systems XXVI, pages 209–218. Springer.
Yang, X.-S. (2010b). A new metaheuristic bat-inspired al-
gorithm. In Nature inspired cooperative strategies for
optimization (NICSO 2010), pages 65–74. Springer.
Yang, X.-S. and Press, L. (2010). Nature-inspired meta-
heuristic algorithms, second edition.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
472
