An Observation of Behavioral Changes of Indoor Dogs in Response to
Caring Behavior by Humanoid Robots
Can Dogs and Robots Be Companions?
Motoko Suzuki, Yuichi Sei, Yasuyuki Tahara and Akihiko Ohsuga
Graduate School of Information Systems, The University of Electro-Communications, Chofu, Tokyo, Japan
Keywords: Pet, Animal, Robot, Interaction, Home.
Abstract: The aim of our research is to build good relationships between pets and robots at home. We aim to promote
of positive interaction between pets and robots. Recently, robots have been become popular with the general
populace. There is a lot of research in human-robot interaction. We pay attention to pets that live in houses
with humans. It is required for pets to like robots for positive interactions between pets and robots to exist. In
this paper, we examine that 1) a robot can take care of dog, and 2) dogs and robots can be companion by
caring behavior of robots toward dogs. In our experiment, we used two robots. One of the robots takes care
of a dog, while the other does not. We observed which robot the dog chooses to interact with and had seventeen
dogs participate in this study. We performed this statistical test to judge whether the dogs treated the robots
with any significant differences.
1 INTRODUCTION
Recently, communication robots like Pepper
(Aldenaran, 2015) have become popular in the
everyday household. Existing studies have been
exploring the possibility of coexistence between
humans and robots in a human-robot interaction field.
The coexistence of pets and robots that live in the
same, however, has not yet been explored. The
objective of this study is to disclose behavioral
guidelines for robots living with pets. We are
therefore researching Pet-Robot Interaction (PRIN)
(Figure 1). There are two main goals of PRIN: 1)
promotion of positive interaction and 2) prevention of
negative interaction. The positive interaction
represents the good relationships between pets and
robots. Examples of such positive interactions include
robots becoming pet playmates instead of humans
(Figure 2 left), robots feeding pets (Figure 2 right),
robots training pets, and robots aiding in the care of
the pets of the elderly. The negative interactions
represent the bad relationships of pets and robots.
Examples of such negative interactions include pets
that are surprised by the movement of robots and pets
disturbing the actions of robots. It is important to
disclose the factors that promote positive interactions
and prevent negative interactions for good
relationships between pets and robots to develop
through various situations at home.
Figure 1: Image of PRIN.
The study focused on two main research
questions:
RQ1 : Can robots take care of dogs?
RQ2 : Can dogs and robots be companion by caring
behavior of robots toward dogs?
In this study, we provided two conditions of
robots being around pets. The first was robots
performing caring behaviors toward pets, and the
second was robots performing no caring behaviors
toward pets involved in the study. As a result, caring
Suzuki M., Sei Y., Tahara Y. and Ohsuga A.
An Observation of Behavioral Changes of Indoor Dogs in Response to Caring Behavior by Humanoid Robots - Can Dogs and Robots Be Companions?.
DOI: 10.5220/0006188604810488
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 481-488
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
481

behaviors of robots influenced the behavior of the
dogs.
In Section 2 of this paper, we describe the
implementation of movement of caring-behavior
robots and the preparations made for the experiment.
Section 3 discusses the procedures involved in the
experimental observation of behavioral changes in
dogs in response to caring-behavior robots. We
describe the results of the experiment in Section 4.
Section 5 breaks down a discussion of the experiment,
and next, Section 6 describes research related to our
experiment, such as Human-Robot interaction and
animal behavior. Lastly, Section 7 summarizes our
research with a conclusion.
Figure 2: The dog on the left is running after the ball thrown
by a robot. The dog on the right is eating food that was
given to it by robots.
2 THE METHODOLOGY OF
CARING BAHAVIOR OF
HUMANS AND HUMANOID
ROBOTS TOWARD DOGS
In Section 2, we explore the difference between when
a human take care of a dog and when the robot takes
care of a dog. In 2.1, we will observe the care of dogs
by humans, and in 2.2, we will describe parts of the
preparations undertaken for the experiment, including
the environment of the room, the implementation of
movement patterns of caring-bahavior robots, and the
result evaluation method.
2.1 Caring Behaviour of Humans
toward Dogs
Currently, dog owners are used to taking care of their
dogs all the time. Examples of cares given to dogs
include feeding, acting as a playmate, toilet cleaning,
taking for walks, brushing, bathing, clipping nails and
hair, etc. We think the burden can be reduced for the
owner by humanoid robots that can care for dogs. In
addition, we think that caring-behavior robot will
improve the dog’s quality of life. We will focus on
two aspects of the experiment: “playmate” (playing
ball) and “feeding”.
First, we observed the behaviour of each dog
when humans took care of it. Table 1 shows the
details of the participant dogs during this part of the
trial.
§1 Playmate (Playing Ball)
The experimenter threw the ball, and we observed
whether the dogs held the ball in their mouths. This
was repeated five times. As a result, nine dogs held
the ball in their mouths five times each, one dog held
the ball in its mouth one time, and seven dogs didn’t
hold the ball in their mouths at all. Through this part
of the trial, it became clear that there are dogs that
play ball and dogs that do not play ball.
§2 Feeding
Dogs B and E were unable to concentrate on this
part of the experiment. The experimenter fed using
tray the other dogs without trouble. We observed
whether the dogs ate. This was repeated five times.
As a result, fifteen dogs ate the human-introduced bait
five times each.
Table 1: Participant dogs.
ID Breed Sex Age
(in years)
A Shih Tzu F 9
B Pomeranian F 5
C Mix M 0.5
D Chihuahua M 4
E Mix F 0.5
F Mix F 0.5
G Mix F 0.5
H Toy Poodle M 4
I Mix M 3
J Mix F 0.5
K Chihuahua M 6
L Mix F 3
M Toy Poodle M 5
N Mix M 4
O Chihuahua F 6
P Toy Poodle F 3
Q Toy Poodle F 7
2.2 Caring Behaviour of Humanoid
Robots for Dogs
We observed the behaviour of the dogs when humans
took care of them in 2.1. Next, we will examine the
behaviour of the dogs when humanoid robots take
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
482

care of them. Two robots were used in the
experiment. We defined one of the robots taking care
of a dogs as the “care robot”, and the other robot was
referred to as the “non-care robot”. In this
experiment, we observed behavioral changes in the
dogs in response to the caring behavior of the care
robot.
2.3 Preparation of Experimentation
In the experiment using the care-robot and non-care
robot, we will describe the implementation of
movement patterns of the caring-behavior robots in
2.3.1. The environment of the room is described in
2.3.2.
2.3.1 Implementation of Care Robot
This experiment involves the humanoid robot Pepper
(made by ALDEBARAN). Pepper’s movement
patterns were installed using Choregraphe 2.4.3
software. The two types of care behavior involved
("playmate" and "feeding") required the
implementation of human-like movement. The
following information is a detailed account of the
behavior of the robot.
§1 Playmate (Playing Ball)
The robot needed to throw the ball to play with
each dog. The motion of the robot was divided into
the following three actions for it to throw the ball.
STEP 1: The palm of the robot faced upward and
robot held the ball with its fingers bent, and the arm
bent at the elbow.
STEP 2: The robot swung the arm down while
holding the ball.
STEP 3: The robot threw the ball by opening the
fingers while swinging the arm up.
Figure 3 below shows the steps of the robot throwing
the ball.
Figure 3: The robot throws a ball.
§2 Feeding
We prepared a bait tray by tying a string to the
paper plate for the robot to the lift and lower the bait
(Figure 4). The robot fed the dog by placing the plate
on the floor using the string secured to the bait tray.
We use the bait that each dog eats normally.
Figure 4: Bait tray with a string to it.
The feeding motion of the robot was divided into
the following two actions.
STEP 1: The string of the bait tray was put in the palm
of the robot’s hand.
STEP 2: The robot put the bait tray on the floor by
bending at the waist.
Figure 5 below shows the steps of the robot feeding
the dog.
Figure 5: The robot puts the tray on the floor.
2.3.2 Experiment Room
The room was large enough to place the care robot
and non-care robot inside and a dog could move
freely. In the room, there were chairs and tables.
Figure 6 is a sketch of the room in which the
experiment took place. Diagonal lines show the
furniture. Smiling faces represent the position of the
robots. The two robots faced the center of the room.
Figure 6: Sketch of the room.
An Observation of Behavioral Changes of Indoor Dogs in Response to Caring Behavior by Humanoid Robots - Can Dogs and Robots Be
Companions?
483

3 EXPERIMENT
The experiment was to explore the non-care robot and
care robot actions implemented in Section 2 and
observe the dog’s behavioural changes following the
care robot’s actions toward the dogs. After the care
robot performed a care action, the tray containing the
bait was placed in front of the two robots. One dogs
at a time was released from a distance of 2 m. from
the robot, and we observed whether the dogs ate the
food in front of either robot.
In order from the dog to determine the difference
between the care robot and non-care robot, the dogs
distinguished between the yellow and blue (Neitz,
1989). One of the two robots was dressed in the
yellow outfit, and the other wore blue clothes. The
color of clothing was replaced for each test dog.
The experimenter changed the position of the
robot that took over the caring care behavior for each
seventeen dogs. The following describes the details
of the procedure for each caring behavior.
3.1 Playmate (Paying Ball)
Experiments were conducted in the following
conditions and procedures for all seventeen
participant dogs.
3.1.1 Conditions
The playmate phase involved the two conditions
below.
Condition 1: The care robot played ball with the
dog.
Condition 2: The non-care robot didn’t play ball
with the dog.
3.1.2 Procedures
First, the care-robot, non-care robot, and a dog were
placed into the experiment room (2.2.2). The
experiment followed four steps for each participant
dog (Figure 7).
STEP 1: Care robot threw the ball. Then we
observed whether the participant dogs held the ball in
its mouth. This was repeated 10 times.
STEP 2: Put the trays of bait in front of the two
robots.
STEP 3: We observed which tray the dog ate from
first. This was repeated 5 times.
STEP 4: The experimenter swapped the position
of the care robot and non-care robot manually in front
of the eyes of a dog.
STEP 5: The Tray of bait were put in front of the two
robots. We then observed which tray the dog ate from
first. This was repeated 5 times.
Figure 7: The procedures of the experiment.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
484
3.2 Feeding
Experiments were conducted in the following
conditions and procedures for fifteen of the
participant dogs. Exclude Dogs B and E because they
couldn’t concentrate on this part of the experiment.
Experiments were conducted following the
conditions and procedures described below.
3.2.1 Conditions
Two conditions of the feeding act are described
below.
Condition 1: The care robot feed the dog.
Condition 2: The non- care robot didn’t feed the
dog.
3.2.2 Procedures
Care robot, non-care robot, and a dog were placed the
experiment room (2.2.2). The experiment followed
the four steps below for each participant dog.
STEP 1: Care-robot fed the dog. This was
repeated 10 times.
STEP 2: Put the trays of bait in front of the two
robots.
STEP 3: We observed which tray the dog ate from
first. This was repeated 5 times.
STEP 4: The experimenter swapped the position
of the care robot and non-care robot manually in front
of the eyes of a dog.
STEP 5: The Tray of bait were put in front of the
two robots. We then observed which tray the dog ate
from first. This was repeated 5 times.
4 RESULTS
4.1 Playmate (Paying Ball)
In Step 1of the playmate experimental procedure, the
care robot threw the ball 10 times. The dogs involved
in the experiment are shown in Table 1, and after the
experiments, the dogs were split into two groups. The
number of the participant dogs that held the ball in
their mouths is nine [C, E, F, G, H, J, L, N, and P],
and this occurred an average of 9.88 times.
The number of the participant dogs that held the
ball in their mouths is eight [A, B, D, I, K, M, O, and
Q], and this occurred an average of 0.375 times.
In the following figures, we refer to the dogs that
held the ball in their mouths as “dogs that play ball
with robots,” and we refer to the dogs group less than
five time that held the ball in their mouths as “dogs
that do not play ball with robots.”
The experiment disclosed that care robot can play
the ball with dogs. And, it is equal human fed.
The bait trays were placed in front of the two
robots in experimental procedure Steps 3 and 5. We
observed which tray the dog ate from first 10 times
each for the two groups previously mentioned. The
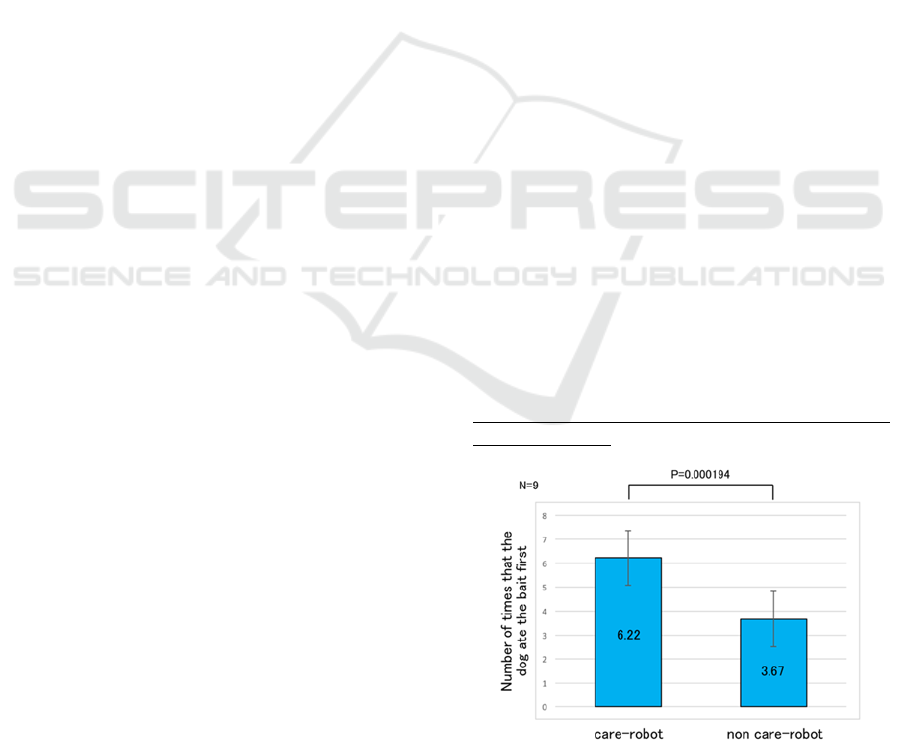
results are shown in Figures 8 and 9. The group,
“dogs that play ball with robots,” (nine dogs) chose to
eat the food an average of 6.22 times when it was
placed in front of care robot and 3.66 times when
placed before non-care robot (Figure 8). Dog P did
not eat the food of either robot one time out of the ten;
however, she ate the bait the other nine times. The
group, “dogs that do not play ball with robots,” (eight
dogs) chose to eat the food an average of 4.125 times
when it was placed before care robot and 5.75 times
when the tray was put in front of non-care robot
(Figure 9). Dog D refused to eat the food in front of
both robots once out of ten times; however, she, too,
ate the bait the other nine times.
We calculated the number of selected times “dogs
that play ball with robots” first ate from each robot.
The result is P = 0.000194. The calculation of the t-
test showed that the behavioral changes of the dogs
are statistically significant. The study notes that “dogs
that play ball with robots” chose care robot more
times than non-care robot.
We calculated the number of selected times “dogs
that do not play ball with robots” first ate from each
robot. The result is P = 0.0164. The calculation of the
t-test showed that the behavioral changes of the dogs
are statistically significant. The study suggests that
“dogs that do not play ball with robots” chose non-
care robot more times than care robot.
The video of the experiment is in
https://www.youtube.com/channel/UC8Zri5sVRCU
w1kpesuNByVQ.
Figure 8: The number of times “dogs that play ball with
robots” first ate the bait in front of each robot after playing
ball.
An Observation of Behavioral Changes of Indoor Dogs in Response to Caring Behavior by Humanoid Robots - Can Dogs and Robots Be
Companions?
485

Figure 9: The number of selected times “dogs that do not
play ball with robots” first ate the bait in front of each robot
after playing ball.
4.2 Feeding
In experimental procedure Step 1, the care robot fed
each dog 10 times. The fifteen dogs ate the bait an
average of 7.33 times. The trays were placed in front
of the two robots in experimental procedure Steps 3
and 5. The average results are different from the
frequency of times the human fed the dogs. We
summarize that robots can feed dogs, but the
frequency of times the dogs ate are not equal.
We observed which tray of food the dog ate first
10 times. The tray the dogs chose averaged 6 times
for the care robot and 4 times for the non-care robot
(Figure 10).
We calculated the number of selected times a
robot was chosen by the dogs. The result is P =
0.002224. The calculation of the t-test showed that
these behavioral changes of the dogs are statistically
significant. The results show that dogs chose care
robot more often than non-care robot.
Figure 10: The number of times a dog first selected each
robot after the first feeding.
5 DISCUSSION
5.1 Feeding
“Dogs that play ball with robots” [C, E, F, G, H, J, L,
N, and P] chose the care robot an average of 5.875
times and non-care robot an average of 4.125 times
(Figure 11). Note that “dogs that do not play ball with
robots” [A, B, D, I, K, M, O, and Q] chose the care
robot an average 6.125 times and chose non-care
robot an average of 3.857 times (Figure 12).
In both groups, the dogs chose care robot more
often than non-care robot. In particular, there is a
significant difference between the choices of care
robot and non-core robot in “dogs that do not play ball
with robots.” The result is P = 0.002224. Results
show that “dogs that play ball with robots” chose
eating from care robot more often.
Figure 11: The number of times “dogs that play ball with
robots” first ate the bait in front of each robot after feeding.
Figure 12: The number of selected times “dogs that do not
play ball with robots” first ate the bait in front of each robot
after feeding.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
486

5.2 Promotion of Positive Interaction
Behavioral guidelines of robots in order to promote
the positive interaction of dogs and robots are:
1) The robot can play ball with “dogs that play ball
with robots.”
2) The robot can feed “dogs that do not play ball
with robots.”
5.3 Prevention of Negative Interaction
In the playing-ball experiment, “dogs that do not play
ball with robots” chose the non-care robot in some
cases. It is considered that “dogs that do not play ball
with robots” have a negative impression of the care
robot. Some dogs interacted negatively with the
robot, but other dogs interacted positively with the
same robot.
We observed a negative interaction in feeding
experiments. A behavior of the robot surprised the
dog, and the dog ran away from robot because the
robot moved suddenly (Figure 13). Behavioral
guidelines of robots hope to prevent future negative
interaction such as this. The most noted guideline is:
1) The robot needs to move slowly when the dog is
near.
Figure 13: The dog was surprised and ran away from robot.
6 RELATED RESEARCHES
The human-robot interaction field has conducted
various studies related to the spread of the robots in
homes: medication management for the elderly at
home (Prakash, 2013), dog-inspired hearing robots
lead participants to sound sources (Koay, 2013),
social robots elicit increased learning in children
(Kennedy, 2015). In relationships between humans
and dogs, dogs avoid people who behave negatively
toward their owner (Chijiiwa, 2015), dogs like
humans who give food to other humans (Kundey,
2011), and there is the oxytocin-gaze positive loop
between a human and dog when they look each other
(Nagasawa, 2015).
In animal-computer interaction, Zeagler et al.
observed a dog’s touchscreen interactions (Zeagler,
2014). They used yellow and blue circles screen, and
dogs touched the circles with their nose. This has
been used to note that dogs can differentiate between
yellow and blue (Neitz, 1989). Mancine et al.
proposed a canine cancer detection system (Mancini,
2015). Baskin et al. observed that dogs can play on
tablets (Baskin, 2015). Robots affected the dogs’
performance by Lakatos et al. (Lakatos, 2014) Many
of these studies observe animal behavior in a system.
In this study, we aimed to build good relationships
between pets and robots at home. We observed dog
behavioral reactions to two types of robots (care robot
and non-care robot). For the dissemination of robots
to the everyday home, we need examine not only
human-robot interaction, but also pet-robot
interaction. Positive pet-robot interaction must also
consider the characteristics of each pet and the
relationship between pet and owner.
7 CONCLUSIONS
This study was conducted as an experiment for
possible the coexistence of pets and robots in the
home. Both a human and a robot took care of the
dogs. The behavior of the dog toward the human, care
robot and, non-care robot was closely monitored. This
study taught us that robots can take care of a dog
instead of a human. We also discovered that care
behavior of a robot influences the behavior of the dog.
In the experiment, we used two robots (care robot and
non-care robot) and placed bait in front of them. We
observed which bait the dog ate first. In the
experiment of playing ball, there were two groups:
“dogs that play ball with robots,” and “dogs that do
not play ball with robots.” Different behavior of the
dogs toward care robot and non-care robot showed it
is better for a robot to throw a ball to promote positive
interaction. In the feeding experiment, we noted
different behaviors of dogs between care robot and
non-care robot. It is better for a robot to feed the dogs
to prevent negative interactions. From each dog’s
reaction to sudden movements during the experiment,
it is best if the robot moves slowly when the dog is
near.
For future experiments, increasing the
participating number of dogs would be useful. We
will conduct various versions of this experiment to
explore other questions. For example, can a dog learn
through playing with the robot? Is the behavior of a
dog different depending on the relationship between
An Observation of Behavioral Changes of Indoor Dogs in Response to Caring Behavior by Humanoid Robots - Can Dogs and Robots Be
Companions?
487

the owner and the robot? Using the results of the this
study, adapting algorithm of the robot’s behavior to
dog, researches on home robot will advance.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI, Grant
Numbers 26330081, 2687020, and 16K124111.
The authors would like to thank Professor
Isshiki, Associate professor Sugimura, Associate
professor Yamazaki, and the Kanagawa Institute of
Technology for their help in this experiment.
These experiments were conducted with Voice
Research Inc., including Dr. Nishimura and Mr.
Yazawa.
REFERENCES
Akanksha Prakash, Jenay M. Beer, Travis Deyle, Cory-Ann
Smarr, Tiffany L. Chen, Tracy L. Mitzner, Charles C.
Kemp, Wendy A. Rogers, 2013. Older adults'
medication management in the home: How can robots
help?, Human-Robot Interaction (HRI), ACM/IEEE
International Conference, pp.283-290.
Aldenaran, 2015. http://www.softbank.jp/en/robot/
Jay Neitz, Timothy Geist and Gerald H. Jacobs, 1989. Color
vision in the dog, in Visual Neuroscience, 3, pp.119-
125.
Clara Mancini, Rob Harris, Brendan Aengenheister, Claire
Guest, 2015. Re-Centering Multispecies Practices: A
Canine Interface for Cancer Detection Dogs, CHI,
pp.2673-2682.
Clint Zeagler, Scott Gilliland, Larry Freil, Thad Starner and
Melody Moore Jackson, 2014. Going to the
Dogs:Towards an Interactive Touchscreen Interface for
Working Dogs, 27th ACM User Interface Software and
Technology Symposium (UIST), pp.497-507.
Gabriella Lakatos, Mariusz Janiak, Lukasz Malek, Robert
Muszynski, Veronika Konok, Krzysztof Tchon, A.
Miklosi, 2014. Sensing sociality in dogs: what may
make an interactive robot social?, Animal Cognition,
volume 17, Issue 2, pp.387-397.
Hitomi Chijiiwa, Hika Kuroshima, Yusuke Hori, James R.
Anderson and Kazuo Fujita, 2015. Dogs avoid people
who behave negatively to their owner: third-party
affective evaluation, Animal Behaviour, volume 106,
pp.123-127.
James Kennedy, Paul Baxter and Tony Belpaeme, 2015.
The Robot Who Tried Too Hard: Social Behaviour of a
Robot Tutor Can Negatively Affect Child Learning,
ACM/IEEE International Conference on Human-Robot
Interaction, pp.67-74.
K. L. Koay, G. Lakatos, D.S. Syrdal, M. Gácsi, B.
Bereczky, K. Dautenhahn, A. Miklósi and M. L.
Walters, 2013. Hey! There is someone at your door. A
Hearing Robot using Visual Communication Signals of
Hearing Dogs to Communicate Intent, Artificial Life
(ALIFE), IEEE Symposium, pp.90-97.
Kundey SM, De Los Reyes A, Royer E, Molina S, Monnier
B, German R and Coshun A, 2011. Reputation like
inference in domestic dogs (Canis familiaris). Animal
Cognition, pp.291–302.
Miho Nagasawa, Shouhei Mitsui, Shiori En, Nobuyo
Ohtani, Mitsuaki Ohta, Yasuo Sakuma, Tatsushi
Onaka, Kazutaka Mogi and Takefumi Kikusui, 2015.
Oxytocin-gaze positive loop and the coevolution of
human-dog bonds, Science, volume 17, pp.333-336.
Sofya Baskin, Anna Zamansky, 2015. The Player is
Chewing the Tablet!: Towards a Systematic Analysis of
User Behavior in Animal-Computer Interaction, CHI
PLAY, pp.463-468.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
488
