Socially Acceptable Behaviour for Robots Approaching Humans using an
Adaptable Personal Space
Kasper Camillus Jeppesen, Leon Bodenhagen and Norbert Kr
¨
uger
Maersk Mc-Kinney Moller Institute, University of Southern Denmark, Campusvej 55, 5230 Odense, Denmark
Keywords:
Social Robotics, Service Robotics, Human Robot Interaction, Personal Space, Acceptability.
Abstract:
In this paper a new adaptable model of the personal space is proposed. This model takes into account the
position of a persons hands aiming to facilitate interactions with the human while maintaining an appropriate
social distance during the approach. This personal space model has been used as a cost function in the path
planning algorithm Transition-based Rapidly exploring Random Trees. It allows users to influence the robot’s
generated approach at the planning stage by varying their body and hand positions. Results from an online sur-
vey, where participants were shown different simulated approach behaviours, indicate that the model performs
well when it comes to distance regulation and how close the robot comes during the approach. An interesting
discovery from the survey is that the maintenance of eye contact, i.e. the robot keeping oriented towards the
person during the approach, was positively associated with both the closeness of the robot during movement
and judging the intentions of the robot for unaware users.
1 INTRODUCTION
As personal care robots become more commonplace
and people start sharing their environment with such
robots, certain expectations for the robot’s behaviour
arise. For example, the robot should try to follow sim-
ilar social conventions to the ones that humans are
conforming to. Few path planners create paths that
resemble human-like motion behaviour or are subject
to the same rules and constraints. Therefore, adapting
navigation strategies to conform to social conventions
and be as non-obtrusive as possible is important for
improving the perception and acceptance of personal
care robots.
This paper investigates how social conventions,
tendencies and expectations can be modelled and used
as cost functions for a path planning algorithm. In
particular, it proposes a new adaptable model of the
personal space, which describes distance regulations
between individuals, and uses this model for plan-
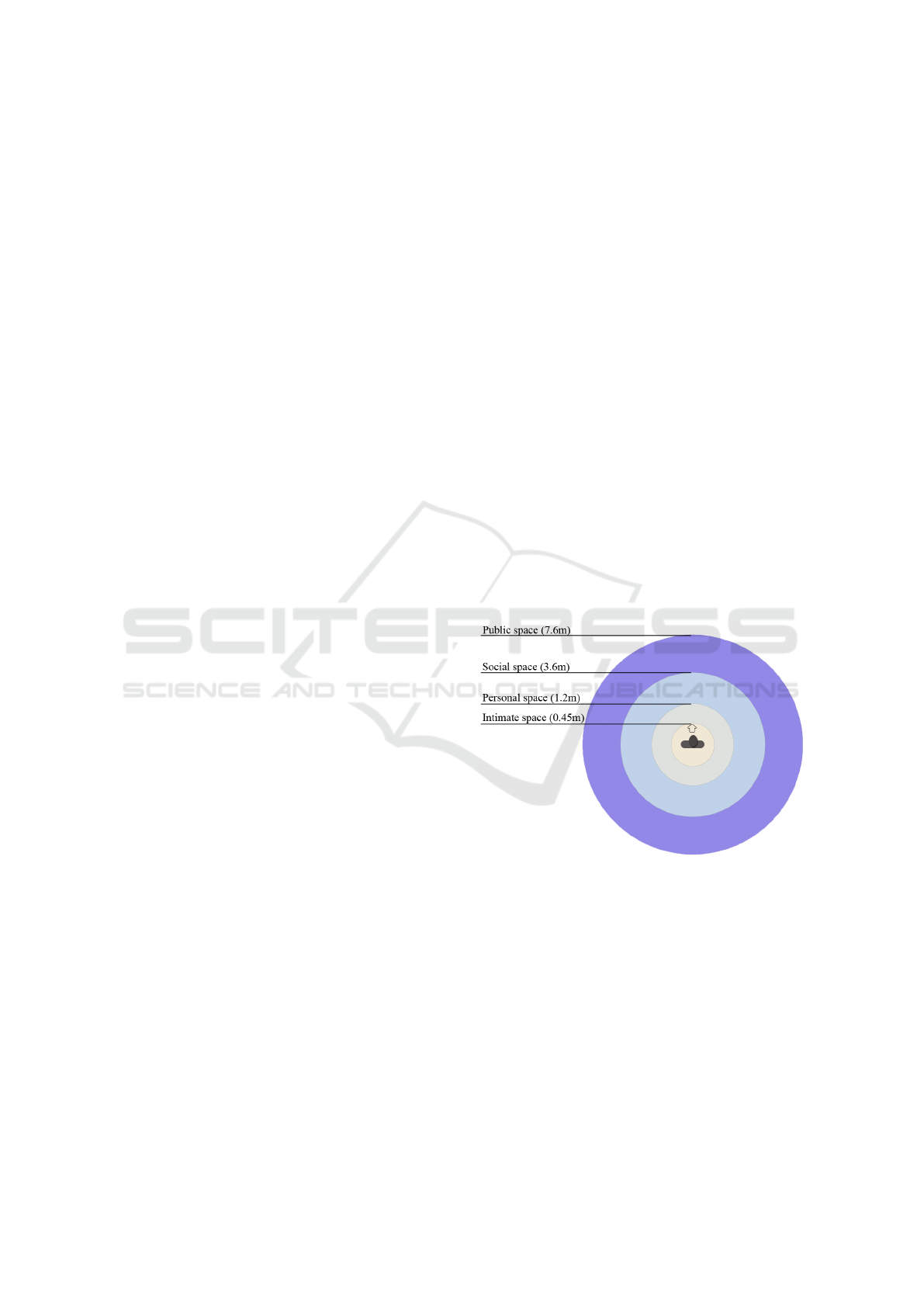
ning approach trajectories. It builds on the concept
of proxemics, see Figure 1, a term and field of study
coined by Hall (1966) and in particular the idea of
the personal space. Each space or region emanating
from the person relates to the comfortable distance
that a certain type of social interaction should take
place (Hall, 1966). In this paper the definition of the
personal space model is extended to depend on the
Figure 1: Spaces associated with a person.
position of a persons hands, such that it allows for
intrusions into the personal space based on hand po-
sition. The hypothesis is that an adaptable personal
space will allow a path planning algorithm to create
approach strategies that can be tailored to the indi-
vidual’s preferences. The robot used for this research
is the Care-O-Bot (Graf et al., 2009), a service robot
with an omnidirectional mobile base with laser range
scanners, a 7-DOF manipulator with gripper, a tray
and a sensor head with a stereo camera and a Kinect-
like depth sensor. Figure 2 shows the robot interacting
with a person using its tray and manipulator.
116
Jeppesen K., Bodenhagen L. and KrÃijger N.
Socially Acceptable Behaviour for Robots Approaching Humans using an Adaptable Personal Space.
DOI: 10.5220/0006193801160121
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 116-121
ISBN: 978-989-758-229-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 2: The Care-O-Bot, a personal care robot.
2 RELATED WORK
The field of robotics research that focuses on human-
robot interaction and collaboration is one of the more
recent and interdisciplinary areas.
Rios-Martinez et al. (2015) discuss a domain
called Social Signal Processing. They estimate that
over 60% of communication between two people
come from nonverbal communication, i.e. body lan-
guage and social cues. It discusses the connection be-
tween social cues (e.g. hand gestures and posture)
and social signals (e.g. emotion, personality, status)
and the importance of this connection in future re-
search of human-robot interactions. The survey also
looks at proxemics and various spaces such as com-
mon models of the personal space, which are mostly
static and non-adaptable. Interaction spaces, related
to groups of people, affordance or activity and spaces
related to objects are discussed and it is apparent that
modelling these spaces efficiently is important for so-
cially acceptable robot navigation. The possibility of
a dynamic personal space model is briefly mentioned,
and in our paper the concept of an adaptable personal
space is explored.
Dautenhahn et al. (2006) carried out human-robot
interaction trials to determine the preferred approach
direction and other defining characteristics of a robot
approach. Results based on a live trial showed that
the most preferred direction was to the right or left
hand side of the person and the least preferred direc-
tion was from the front. The approaches were also
rated in terms of practicality (seen in relation to the
trial environment) and comfort, and the frontal ap-
proach was again the least preferred or lowest rated.
In our work we found the same trend of people prefer-
ring non-frontal or direct approaches when it comes to
judging the closeness of the robot. The paper also dis-
cusses the idea of combining safety, visibility and hid-
den zone criteria that together seek to model the cost
map of an environment. The cost is modelled based
on e.g. whether the person can get the robot into his
field of view by moving just his eyes or if he needs to
turn his head. The cost function also tries to penalize
the robot for making surprising appearances, such as
when coming from a hidden zone that the person can-
not see and into the persons field of view. Instead, the
robot should seek to enter the persons field of view at
a comfortable distance so there is enough time for the
person to react and be aware of the robot. In our work
we use a cost function which is based on the position
of a persons body and hands. We also vary the ori-
entation of the robot so the robot either looks in the
direction of travel or tries to maintain a sort of eye-
contact by looking at the person.
Kirby et al. (2009) implement a navigation frame-
work where human social conventions such as per-
sonal space and tending to one side of hallways are
represented as constraints on a robot’s navigation.
The following constraints were identified as impor-
tant for social behaviour in hallway situations; Min-
imize travelled distance, obstacle avoidance, person
avoidance with personal space and passing on the
right hand side, default velocity where the robot tries
to keep a constant velocity and inertia where the robot
should try to keep moving straight as much as pos-
sible. Each of these constraints are weighted and
combined linearly and used as the objective function
in a modified A
∗
planner. The method was success-
ful in generating paths that resemble human-like be-
haviour when moving down a hallway; passing on-
coming traffic on the right and cutting across the hall-
way based on how far oncoming traffic is. In our work
we utilize a sampling based method for path planning.
Our cost function is also based on a personal space
model, but our model is adaptable instead of constant.
Woods et al. (2006) investigate differences, be-
tween live and video based trials, in responses and
preferences for different characteristics of robot ap-
proaches. Participants, both in the live and video
based trials, were questioned about their preferred
approach direction, stopping distance and approach
speed. There were a high levels of correspondence
(85% resp. 87%) for the least preferred approach di-
rection (frontal) and the ratings of the robot’s speed.
Moderate to high (60-80%) agreement was found be-
tween video and live trials for most preferred ap-
proach direction and the robot’s stopping distance
from the subject. Almost all subjects (93%) preferred
the live trials over the videos. These results are inter-
esting, since in our paper we utilize videos of simu-
lated approaches and online questionnaires for evalu-
ation. This evaluation method is a lot faster, allows
for more experimentation and does not have the same
Socially Acceptable Behaviour for Robots Approaching Humans using an Adaptable Personal Space
117

(x
bc
,y
bc
)(x
bc
,y
bc
)
(x
lh
,y
lh
)
Figure 3: Left: Non-adaptable model. Right: Proposed adaptable model. (x
bc
, y
bc
) and (x
lh
, y
lh
) are coordinates for the body
center and left hand respectively. White corresponds to high values, purple to low values.
safety requirements as live trials, which are time con-
suming to set up and carry out.
3 ADAPTABLE PERSONAL
SPACE MODEL
While a person only physically occupies a portion of
the intimate space, see Figure 1, there is a sense of
ownership and occupation associated with the per-
sonal space. If someone else enters ones personal
space and it was neither expected nor allowed, that
person will be negatively judged because of the in-
trusion. Of course, it is not always possible to keep
ones personal space free of other people, e.g. in pub-
lic transport situations. However, a person willingly
lets go of personal space privileges when participat-
ing in certain activities or entering certain locations.
In approach scenarios the robot should try to obey
the personal space of the person it is approaching and
should only enter when allowed.
In this paper, a new variant of the personal space
model, which is meant to be used for approach-based
human-robot interaction, is proposed. The main dif-
ference between the proposed model and previous
variants of the personal space is that it is dependent
upon the placement of the hands of the person. Each
hand has its own small space with the opposite sign to
the space radiating out from the center of the person.
This can be viewed as a sort of intrusion space where
a cavity is created in the personal space to allow the
robot to intrude. Figure 3 shows the difference be-
tween a common static model (left) and our proposed
adaptable model (right) with a cavity to the persons
left hand side. In the proposed model the space cen-
tered around the left hand allows for intrusion because
of the low value of the personal space in that area.
Each of the spaces that make up the personal space
are modeled by (1).
The center of the Gaussian coincides with the cur-
rent position of hand p
h
∈ R
2
resp. the body center,
p
bc
∈ R
2
. The shape of the Gaussian is controlled by
the amplitude M
i
and the covariance matrix C
i
which
depend on which body part is used – for the body
a isotropic Gaussian has been used, while an elon-
gated Gaussian, hence having elliptical isocontours,
was used for the hands. The cost associated to a posi-
tion p in the personal space is determined by the sum
of spaces for all body parts, each being modeled by:
PS
i
(p) = M
i
exp
(p
i
− p)C
i
(p − p
i
)
T
(1)
with i ∈
{
h, bc
}
indicating the body part. Such that
the total cost is:
PS
cost
(p) = PS
h
(p) + PS
bc
(p) (2)
4 PATH PLANNING WITH THE
PERSONAL SPACE MODEL
The path planning algorithm Transition-based
Rapidly exploring Random Trees (Jaillet et al., 2008)
(TRRT) works on the same principles as the well
known Rapid Random Trees (LaValle, 2006), but
changes the way new configurations are accepted.
The transition test, which gives the algorithm its
name, accepts a new node based on the costs and
distance between the two nodes in the extend step.
Negative cost slops are accepted, nodes with costs
above a max threshold are rejected and nodes that
lead to positive cost slopes are accepted with a low
(self-tuning) probability.
The cost of a robot configuration is determined
by the value of the personal space at that configura-
tion’s coordinates, given by (2) with the proper inputs.
Therefore, the negatively valued parts of the personal
space, determined by the persons hands, will contain
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
118

Figure 4: TRRT exploration in an artificial environment
with many high cost areas.
the goal configuration or goal region for the path plan-
ning and allow for easy exploration due to the associ-
ated low cost.
Figure 4 shows the TRRT exploring and finding
a solution in a cost environment with many high cost
areas. The cost of the environment in which the sim-
ulated approaches take place in is considered obsta-
cle free, and therefore only influenced by the personal
space model.
5 EXPERIMENTS
Recordings of the body and hand position of a real
person, using the Microsoft Kinect V2 sensor, were
used to obtain the input for the personal space model
for the simulation environment. The recorded person
was sitting in a chair and stretched his left hand out to
indicate where he wants the robot to end up. The sim-
ulated person is static throughout the robot approach
and is merely there for visualization purposes.
The TRRT algorithm generated a path offline and
post-processing steps for smoothing the path were ap-
plied. The approach was visualized in the Gazebo
simulator using the Care-O-Bot ROS/Gazebo pack-
ages. A series of videos was recorded, where the
robot approached a sitting man using different trajec-
tories and different orientations along the trajectory.
An online survey gathered responses (between 36 and
39 for each question) about agreement with the state-
ments S1-S4 about the robot approaches.
S1: The robot came too close during its movement
S2: The robot stopped too close
S3: The robot’s movements were predictable
S4: The robot’s intention was clear
The participants rated their agreement on a 5-point
Likert-scale between 1 (strongly disagree) and 5
(strongly agree). Participants were not privy to any
information about what they were going to be asked
Figure 5: Simulated environment, personal space model and
TRRT exploration tree.
or the content of the videos and the order of the videos
was randomized.
In the simulation scenario, the robot starts near the
kitchen area and moves to the persons left hand side
to deliver a beverage. The start and goal location are
therefore the same in all the videos, but the robot path
and orientation differs. Figure 5 shows the different
steps in simulating the approach scenario. Pictured
is the kitchen environment, the exploration of possi-
ble robot configurations by the TRRT algorithm and a
plot of the personal space model (cost function) with
a cavity in front of the person to his left hand side.
More details about the scenario and simulations can
be found in Jeppesen (2015).
The four different approach strategies are visual-
ized in a time-lapse manner in Figure 6(a-d) and are
accessible online
1
.
6 FINDINGS
The paths that were planned using the personal space
model (video 1 and 2) tended to stay farther from
the person during the approach and only come close
once there was a cavity in the personal space (see
Figure 5). Approaches planned without the per-
sonal space model (video 3 and 4) would take almost
straight line paths to the goal, violating the personal
space boundaries.
Participants rated their agreement with statements
in a questionnaire on a 5-point Likert-scale. For each
statement an ANOVA was conducted to investigate if
the usage of the proposed model had a positive ef-
fect. The results indicate a positive effect for the
1
https://www.youtube.com/playlist?list=PLKvb2SEOLj
c9Wi ts3GwhRE 7aV7UR 2z
Socially Acceptable Behaviour for Robots Approaching Humans using an Adaptable Personal Space
119

(a) (b)
(c) (d)
Figure 6: Illustration of the videos. Top row (a, b): using the adaptable model; bottom row (c, d): using straight motions; left
column (a, c): facing the in direction of motion; right column (b, d): facing the subject.
closure, based on the statement “the robot came too
close during its movement”, (p=0.061). Interestingly,
the intention of the robot was rated to be less clear
(p=0.049) when the proposed model is used. This can
indicate that the participants might expect additional
cues, revealing the robots intention, to be provided by
the robot.
The paths planned with the adaptable personal
space model (video 1 and 2) rated more positively for
the closeness of the robot during the movement, i.e.
the participants had stronger disagreement with the
statement. The results clearly indicate that video 2
shows the best rated approach. Keep in mind that the
difference between video 1 and 2 is that in video 2 the
robot keeps looking at the person during the approach,
i.e. the simulated eye-contact. The straight-line paths
(video 3 and 4) rated higher in terms of predictability
of motion, which was expected since it is a simpler
motion.
An interesting finding was that similar paths that
utilized different robot orientation strategies rated dif-
ferently. The paths planned with the adaptable per-
sonal space model were tested with the robot looking
in the direction of travel and with the robot trying to
maintain ‘eye-contact’ by facing the user the entire
time. The approach with eye-contact (video 2) had
significantly better ratings in terms of closeness of the
robot compared to video 1 without eye-contact. The
difference in rating between video 3 (no eye-contact)
and video 4 (eye-contact) is smaller, but supports the
trend. The down-side to the strategy of maintaining
eye-contact is that it can make the robot’s movement
feel less predictable, especially when the robot is not
moving in a straight line, because it is easier to guess
where the robot is going when the robot faces in the
direction of movement.
The comments from the participants provide addi-
tional clues on this aspect. One of them (participant
31) argues:
“There is a scenario where the robot makes a
wide arc whilst keeping the person in its focus
– this seems predatory and is alarming.”
on the other hand participant 38 states:
“The first one where it curved around you to
your side whilst facing you gave a much more
waiterly impression, I liked that one.”
which indicates that neither of the strategies might
fully comply with the behavioral norms that are ap-
plied unconsciously. This might be one underlying
reason for the results for the different conditions not
to differ as much as expected. Furthermore, this leads
to the conclusion that a more complex model for the
approach behaviour, with the gaze as an active el-
ement and taking characteristics of the person, e.g.
gender, into account, will improve the robots abilities
to optimize the social distance (Mumm and Mutlu,
2011).
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
120

7 CONCLUSION
An adaptable personal space model was used as a cost
function for a path planning algorithm, TRRT, to plan
simulated approaches toward a sitting person. The ap-
proaches using the proposed adaptable personal space
model were rated more positively than the direct ap-
proaches, according to results from an online survey
asking if the robot came too close during its move-
ment. Furthermore, approaches where the robot ori-
ents itself to look at the person received more positive
ratings than approaches where it was oriented in the
direction of travel.
Due to the simplistic nature of the simulation envi-
ronment, the adaptability of the personal space model
could not be tested fully. Live trials with the real robot
would be the best way to verify the trends that the
online survey has revealed, concerning eye-contact
and the distance regulation due to the personal space
model. The different approaches will likely be rated
slightly differently in live trials due to the embodi-
ment and physical presence of the robot, which are
an important aspects of human-robot trials. How-
ever, our results give good indications that our adapt-
able personal space model has relevant properties and
that gaze contact is rated positively in approach be-
haviours.
ACKNOWLEDGEMENTS
This work has been supported by the project Pa-
tient@Home which is funded as a strategic platform
for innovation and research by the Danish Innovation
Fond.
REFERENCES
Dautenhahn, K., Walters, M., Woods, S., Koay, K. L., and
Nehaniv, C. L. (2006). How may I serve you? A robot
companion approaching a seated person in a help-
ing context. In 1st ACM SIGCHI/SIGART Conf. on
Human-robot Interaction.
Graf, B., Reiser, U., H
¨
agele, M., Mauz, K., and Klein, P.
(2009). Robotic home assistant Care-O-bot 3 - prod-
uct vision and innovation platform. In IEEE Workshop
on Advanced Robotics and its Social Impacts, pages
139–144.
Hall, E. T. (1966). The Hidden Dimension. Garden City,
N.Y., Doubleday.
Jaillet, L., Cort
´
es, J., and Sim
´
eon, T. (2008). Transition-
based RRT for Path Planning in Continuous Cost
Spaces. In Intelligent Robots and Systems, pages
2145–2150.
Jeppesen, K. C. (2015). Socially acceptable behavior for
robots approaching humans. Master’s thesis, Univer-
sity of Southern Denmark.
Kirby, R., Simmons, R., and Forlizzi, J. (2009). Com-
panion: A constraint optimizing method for person-
acceptable navigation. In IEEE Int. Symp.on Robot
and Human Interactive Communication.
LaValle, S. M. (2006). Planning Algorithms. Cambridge
University Press, Cambridge, U.K.
Mumm, J. and Mutlu, B. (2011). Human-robot proxemics:
physical and psychological distancing in human-robot
interaction. In 6th Int. Conf. on Human-robot Interac-
tion.
Rios-Martinez, J., Spalanzani, A., and Laugier, C. (2015).
From proxemics theory to socially-aware navigation:
A survey. Int. Journal of Social Robotics, 7(2):137–
153.
Woods, S., Walters, M., Koay, K. L., and Dautenhahn, K.
(2006). Comparing human robot interaction scenarios
using live and video based methods: towards a novel
methodological approach. In 9th IEEE Int. Work. on
Advanced Motion Control, pages 750–755.
Socially Acceptable Behaviour for Robots Approaching Humans using an Adaptable Personal Space
121
