
An Evolutionary Traveling Salesman Approach for Multi-Robot Task
Allocation
Muhammad Usman Arif and Sajjad Haider
Faculty of Computer Science, Institute of Business Administration, Karachi, Pakistan
Keywords: Multi-Robot Task Allocation, Evolutionary Algorithms, Robot Operating System, Multi-Agent Systems.
Abstract: Multi-Robot Task Allocation (MRTA) addresses the problems related to an efficient job assignment in a
team of robots. This paper expresses MRTA as a generalization of the Multiple Traveling Salesman
Problem (MTSP) and utilizes evolutionary algorithms (EA) for optimal task assignment. The MTSP version
of the problem is also solved using combinatorial optimization techniques and results are compared to
demonstrate that EA can be effectively used for providing solutions to such problems.
1 INTRODUCTION
Efficient planning is one of the major skills required
to accomplish a complex task by a team of agents,
be it humans or robots. Multi-Robot Task Allocation
(MRTA) deals with the problem of determining the
optimal assignment of a group of tasks to a team of
robots for efficient completion of the jobs at hand. A
group of robots cleaning up an office block, a team
of surveillance bots providing security to a facility,
or a team of firefighting robots unit covering a
disaster situation in a forest fire are all examples of
multi-robot tasks. To make this cooperation of
agents efficient, a plan needs to be formulated on
how a team of robots should approach a set of tasks
for optimum results.
The first and the most fundamental question that
needs to be asked in this case is “which agent
performs what task?” To answer this, an
optimization strategy needs to be executed. The
strategy must keep all the spatial, temporal, and
physical constraints of the team in check and
provide a plan that optimizes the whole operation.
Gerkey and Matarić (2004) proposed a 3 axis
taxonomy for MRTA. Gerkey (2003) proved that
MRTA in its simplest form is a typical
Combinatorial Optimization problem that is of NP-
Hard nature. This implies that for larger problems,
only approximate solutions are possible which
brings heuristic-based optimization schemes into the
picture. This research aims to use Evolutionary
Algorithms (EA) for this purpose. It is worth
mentioning that compared to mathematical modeling
methods, the evolutionary computing paradigm has
proved to be more flexible in real-life dynamic
environments. Especially, since at times, it is
difficult to formulate every real-life scenario
mathematically. Even if it is done, any change in the
environment may make the whole mathematical
model infeasible. The experiments for the EA are
performed on a Robot Operating System (ROS)
(Quigley et al., 2009) based setup, using Gazebo
(Koenig and Howard, 2004) as a simulator. The
selection of ROS for implementation makes the
experiments as close to the real robots as possible. In
addition, the whole setup can be implemented on a
team of real robots with only minor changes.
The results obtained from the optimization are
validated against a mathematical formulation of the
same problem using Multi-Traveling Salesman
Problem (MTSP) approach. The MTSP is modelled
in AMPL (Fourer et al., 1987) and is solved using
CPLEX (“IBM CPLEX CP Optimizer,” n.d.) Solver.
The CPLEX is commercially provided by IBM and
solves linear programming problems using the
simplex technique through primal or dual variants.
Due to computing constraints in AMPL’s student
version, the CPLEX solver provided by the NEOS
server (Gropp and Moré, 1997) was used. NEOS
server hosts a number of free solvers online for
numerical optimization purpose.
The rest of the paper is organized as follows.
Section 2 provides a brief literature review along
with an overview of the key concepts used in this
work. Section 3 provides the details of the
Arif M. and Haider S.
An Evolutionary Traveling Salesman Approach for Multi-Robot Task Allocation.
DOI: 10.5220/0006197305670574
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 567-574
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
567

experimental setup. Section 4 analyses the results
obtained. Finally, Section 5 discusses the findings of
the research and provides future research directions.
2 LITERATURE REVIEW
2.1 Overview of MRTA
MRTA is the study of efficient task allocation for
multi-robot teams. It was classified by Gerkey and
Matarić (2004) on a three axis taxonomy. The
taxonomy differentiates among (a) Type of Robot:
Single Task Robot (ST) and Multiple Task Robots
(MT) (b) Task type: Single Robot Tasks (SR) and
Multiple Robot Tasks (MR) and (c) Arrival Time of
the task: Instantaneous Arrival (IA) and Time
Extended (TE). According to this taxonomy, the
most basic and the most researched distribution is
the Single Task - Single Robot - Instantaneous
Arrival (ST-SR-IA).
In an organizational paradigm, MRTA
techniques could be distributed into two types,
namely, centralized and distributed. Centralized
techniques comprise of a central planning unit which
has the knowledge of the whole environment.
Information about the number of jobs at hand,
positions of every robot, the current task list of every
robot, etc. are available to the central unit. Global
communication is needed for sharing all the
information with the central station. The centralized
techniques have the advantage of providing the
optimal solution all the time. Such systems are
widely used for MRTA (Al-Yafi et al., 2009).
Centralized systems, however, suffer in robustness
and overhead of communication. Distributed
techniques, on the other hand, have no centralized
agent, and the authority of task allocation is
dispersed amongst the agents. Depending upon the
technique used, robots in a distributed system might
act completely independent or occasionally share
some information with other robots for plan
optimization. Distributed planning might not provide
with the optimal solution, but do not need global
communication, and have a high degree of
robustness and scalability (Parker, 1998). All the
MRTA techniques present in the literature can be
distributed into the following four major approaches
which are briefly discussed in the sequel:
(a) Behaviour Based
(b) Market Based
(c) Combinatorial Optimization Based
(d) Evolutionary Algorithm Based
2.1.1 Behaviour based Approaches
These are distributed solution approaches which
incorporate some form of mathematical or heuristic
based action selection mechanism in the robot.
Based on a reluctance or willingness like feature, the
mechanism decides if the robot should consider a
particular job or not. ALLIANCE (Parker, 1998),
and BLE (Werger and Matarić, 2000) are good
examples of these schemes. Behavior-based
techniques enjoy the basic advantages of distributed
systems and require no communication at all. Since
the plans executed by robots are local in nature and
lack any interaction at the global level, these
techniques at times fail to provide the best solutions
and usually come up with approximate solutions.
2.1.2 Market-based Approaches
The market-based approach is another distributed
approach which works on an auction-based
mechanism. Usually, a bid is requested from all the
interested robots to attempt an available task. The
bid majorly corresponds to the cost (in terms of the
required resources) the robot expects to incur while
attempting the task. When all the bids have been
received, the task is assigned to the best bidder. It
must be stated that comparative studies (Badreldin et
al., 2013) have found auction based schemes to
struggle in performance when compared with other
approaches. Hybrid schemes have also been
explored that work in combination with techniques
such as reinforcement learning (Kose et al., 2004)
and combinatorial optimization (Hunsberger and
Grosz, 2000) for improved results.
2.1.3 Combinatorial Optimization based
Approaches
Gerkey and Matarić (2003) showed that ST-SR type
MRTA problems are instances of Optimal
Assignment Problem (OAP) (Gale, 1960). This is
the only distribution of the MRTA taxonomy that is
polynomially solvable; all the remaining problems
are NP-hard. Despite the fact that exact solutions of
the ST-SR distribution exist and can be achieved in
finite time, suboptimal techniques have been
proposed in the literature mainly because the
expansibility and efficiency of combinatorial
optimization based approaches are weak. The two
popular techniques that have been used in this case
of MRTA are linear programming (Atay and
Bayazit, 2006) and Optimal Auction Algorithms
(Berhault et al., 2003).
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
568

2.1.4 Evolutionary Algorithm based
Approaches
Evolutionary algorithms are population-based
optimization schemes, inspired by Darwin’s theory
of evolution, that comprise of a population of
solutions optimized using evolutionary operators
such as selection, reproduction, mutation, and
recombination.
The algorithm starts with a population of
randomly initiated solutions. It aims to improve
solution quality over a period of several generations.
A balance is kept in every generation between
exploring and exploiting the solution space through
the crossover and mutation operators. Evolutionary
techniques are quite famous and successful in
solving problems such as MRTA. For example,
(Shea et al., 2003) uses a genetic algorithm to
provide a solution for multiple target tracking by a
group of robots. (Jones et al., 2011) also used a
genetic algorithm for a time extended task
assignment in a disaster situation. This paper uses
EA based optimization for multi-robot task
assignment. There are three major components of an
EA which need to be taken care of while designing
an effective optimization scheme. These three
components are explained below:
Chromosome Encoding
MTSPs are usually encoded for EA using 3 basic
formats: single chromosome technique, two
chromosome technique, and two part chromosome
technique. All three representation are shown in
Figure 1.
Having n jobs at hand to be attempted by m
robots, the single chromosome representation
represents the complete solution using a single
chromosome which is n + m -1 in length. Figure 1a
provides a possible representation of single
chromosome scheme. The solution comprises of m
sub-tours, one for each robot, each of which is
identified by a marker (negative numbers in this
case). All the sub-tours combined should be a
permutation of n jobs. Jobs are visited by the robots
in the order by which they appear in the
chromosome. The second encoding scheme
(Figure 1b) uses two chromosomes of length n to
represent a single solution. The first chromosome
represents a permutation of jobs to be attempted
whereas the second chromosome gives information
regarding the robot attempting a particular job from
chromosome 1. The index of a job represents the
order in which it will be attempted by the robot
responsible for it.
Carter and Ragsdale (2006) highlight the lacking
of these two schemes and propose the two-part
chromosome representation (Figure 1c). The two-
part chromosome has one portion having a
permutation of the jobs to be attempted, and the
other portion representing the number of jobs
assigned to each robot from the first portion. The
chromosome length is n + m, n for the first portion
and m for the second. This representation needs no
markers for isolating the two portions, as it could be
done on the basis of length. This paper uses the two
part chromosome representation for the ST-SR-IA
type of MRTA problem.
Figure 1: Chromosome Representation for MRTA.
Evolutionary Operators
A balanced exploration and exploitation of the
solution space ensure good results in EA. Crossover
and mutation have to be smartly designed and
customized according to the problem, for them to be
effective. (Carter, 2003; Yuan et al., 2013) highlight
the limitations of conventional crossover operators
when applied to the two-part chromosome
representation. Carter (2003) emphasizes the
importance of further exploration whereas (Yuan et
al., 2013) presents a new crossover operator called
the Two-part crossover (TCX), used with mutation,
to achieve better results. TCX shows better results
when compared with conventional crossover
schemes (Yuan et al., 2013). This paper uses the
TCX operator for an effective explorative crossover.
Fitness Function
Fitness function guides the search direction of EA as
it aims to obtain a good solution. The fitness
function judges the effectiveness of the proposed
solution. It helps the EA not only differentiate
between good and bad solutions but also helps in
moving from one generation to another. The
crossover, mutation, and selection operators of an
EA all depend on the fitness function, either directly
or indirectly.
An Evolutionary Traveling Salesman Approach for Multi-Robot Task Allocation
569

3 PROBLEM FORMULATION
It is generally suggested that problem formulation
plays a vital role towards getting desirable results
from an EA. This paper takes advantage of the
similarities the ST-SR-IA problem distribution has
with MTSP by formulating it as a generalization of
MTSP. This section explains the structure of the
representation used for solving the MRTA.
Figure 2: Two-part Chromosome Crossover (TCX).
3.1 Multiple Traveling Salesman
Problem
MTSP is an extension of the famous traveling
salesman problem (TSP). With n cities to be visited,
the MTSP seeks m tours, one for each salesman (n >
m) traveling to each city only once. Even the simple
TSP falls under the NP-complete (Junjie and
Dingwei, 2006) class of problems. Although exact
solution approaches for MTSP exist, but due to its
NP-hard nature, the combinatorial complexity
increases for large sized problems. Heuristic based
methods are a popular choice in such cases.
Amongst heuristic based methods, EA is successful
and widely used. Due to its structure, MTSP could
be generalized to solve a number of similar
problems. Problems such as vehicle routing problem
(Park, 2001) and job scheduling (Carter and
Ragsdale, 2002) provide promising results when
modeled as MTSP. This research uses MTSP for
formulating the structural representation of MRTA
to be optimized by EA. The MTSP based
representation is also later used for validating the
EA results by solving the MTSP through
combinatorial optimization based technique.
3.2 Evolutionary Algorithm
As already discussed in Section 2, chromosome
encoding, evolutionary operators, and fitness
function are the three most important factors of an
EA for achieving effective results.
The two-part chromosome technique is used in
this paper for solving the ST-SR-IA type MRTA
problem. The first part represents a permutation of
all the jobs, while the second part represents the set
of jobs to be executed by each robot. The position of
the job in the permutation represents the order in
which they are to be executed. Figure 1c represents a
solution where the first robot attempts 5 jobs in the
order 1-9-12-3-4, the second robot has 4 jobs to do
in the order 7-8-5-11, and the third robot will
perform 3 jobs in the order 2-6-10.
As already discussed in Section 2, the TCX
(Yuan et al., 2013) shows better results when
compared with conventional crossover scheme for a
two-part chromosome representation. The working
of the TCX is illustrated in Figure 2. TCX is a 5 step
operation that takes 2 parents and produces 2
offspring. The figure represents chromosomes for a
12 task problem with 3 robots.
Mutation is as important as crossover in an EA
because it keeps genetic diversity in the population
alive. The algorithm uses inverse mutation for this
purpose. Inverse mutation picks a sub-tour randomly
from the first portion of the two-part chromosome
and inverts it. No mutation is applied to the second
portion of the chromosome.
The fitness function is concerned with the total
distance the team has to cover in order to complete
all the tasks. Since we are concerned with reducing
the team's efforts to accomplish all the tasks at hand,
this becomes a minimization problem. Hence, the
fitness function comprises of a simple sum of
Euclidean distance calculation for each robot. In
other words, for every robot, the sub-tours presented
by the chromosome are worked through once and
the total distance traveled by all the robots combined
acts as the fitness function.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
570
4 EXPERIMENTAL
EVALUATION
4.1 Simulation
The experiments were performed on a powerful
open-source simulator, Gazebo, which provides an
accurate simulation environment for population of
robots with a robust physics engine. A team
comprising of three Turtlebots (Garage, 2011) was
used for these experiments. Turtlebot is a low-cost
open-source robot, comprising of (a) depth camera
that allows the robot to see in 3D (b) a mobile base
which has bumper sensors and (c) two differential
drive motors which help the robot move. During the
experiments, each Turtlebot was initiated as an
individual ROS node having its independent
navigation using the depth camera. The navigation
not only planned the robot’s path for stationary goals
but also kept the dynamic obstacles (other robots) in
consideration.
The simulation was carried out on a preloaded
map of 7 x 7 meters. The locations of the jobs were
provided at the start of the algorithm as the paper
only focuses on Instantaneous Arrival (IA) type of
problem. For simplicity, the robot had to just visit
the job location in order to get it counted as
complete. Only one robot had to visit a job location
as the jobs are SR (Single robot) in nature. Random
job locations were generated for this purpose. Any
solution which was unable to complete even a single
job from the job set was considered invalid and was
removed from the population.
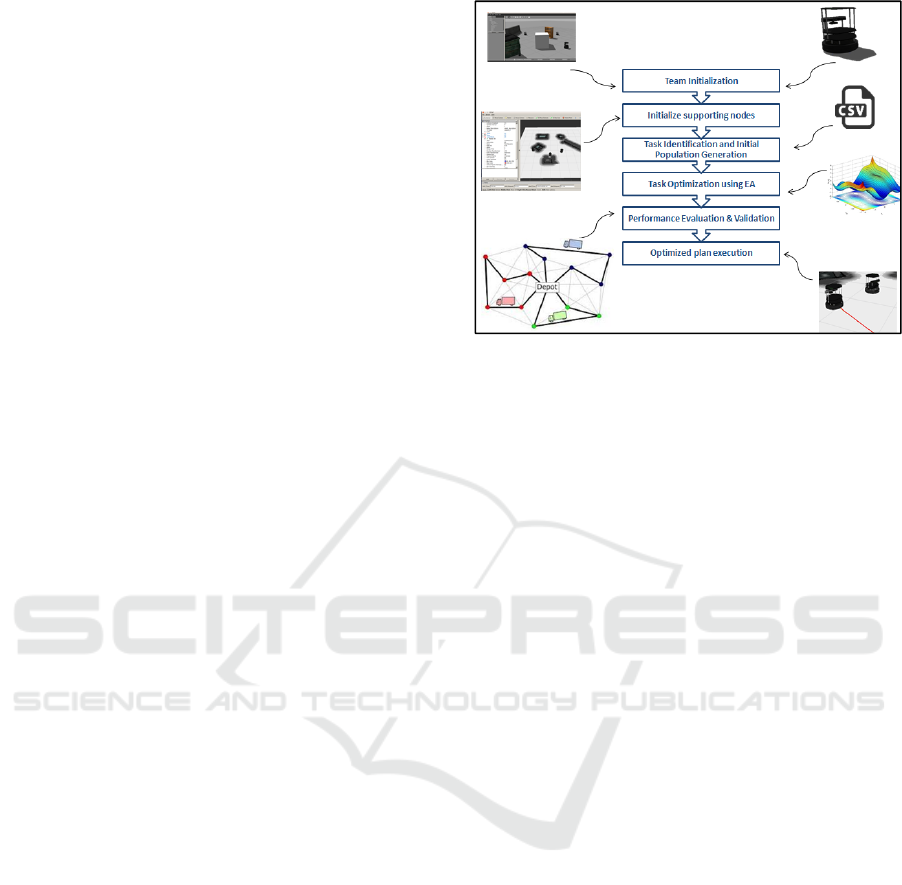
4.2 EA Implementation
The TCX operator with a conventional mutation
operator for exploration and exploitation was used.
To further improve the exploration and exploitation
components and to prevent the algorithm from
getting stuck at local minima, an Artificial Immune
System (AIS) (Hunt and Cooke, 1996) type
approach was used in the algorithm. In the (µ + λ)
generational scheme, 30% randomly generated
solutions were inducted in every generation. Figure
3 gives an overview of the scheme.
Figure 3: Overview of the working model.
4.3 Validation
For validation purposes, the job distribution and the
map information was passed to a linear optimization
program written in AMPL for the optimization of
the MTSP based representation of free AMPL the
ST-SR-IA. Due to computing constraints in the
version, the code was run on NEOS online server
using the CPLEX solver. Distance matrix
comprising of distance values from one job to
another was generated using ROS and Gazebo. This
step was repeated for different jobs. The distance
matrices were fed into the CPLEX algorithm for tour
optimization. Figure 4 shows a distance matrix for a
10 job problem. The tours generated through
CPLEX and their lengths were used for validation
purpose. Next, the EA was initiated with a random
initial population. A fix population size of 300
individuals was kept for all the job distributions,
with a crossover probability of 0.4 and a mutation
probability of 0.6.
The EA was terminated whenever the fitness of
our best solution reached in the proximity of 1% of
our exact solution obtained through CPLEX. The
generations taken to reach the solution were also
recorded. It is worth mentioning that EA was able to
match the best solution for all the job distributions
on which it was tested. Table 1 gives the accuracy
comparison of CPLEX and EA and the generations
taken by the EA to achieve the exact solution.
The relation between accuracy of the EA and
generations needed was also plotted. Figure 5
provides this graph for a cluster of 30 job problems.
The average generation values for the graph were
computed by generating random job distributions
multiple times and running the EA over them. As it
can be seen, the better quality we seek the more
An Evolutionary Traveling Salesman Approach for Multi-Robot Task Allocation
571

generations would be needed, and it is exponential in
nature.
A surface plot representing the changes in fitness
value with any changes in the job distribution of the
robots is shown in Figure 6. This provides a deep
insight into the properties of the fitness curve. The
figure shows the surface plot for the 30 job problem.
from the first portion of the chromosome constant
and just altering the number of jobs to be executed
by each robot (that is the second portion of the
chromosome). For easier visual understanding, the
surface plot in Figure 6 represents the inverse of
fitness values. A constant value is assigned to the
combinations that are not possible, that is, for a 30
job problem, this included combinations that have a
sum greater than 30.
As can be seen from the surface plot, there is a
very obvious ridge along the diagonal, indicating not
much difference in fitness values for minor changes
in robots job distribution (keeping the job
permutation in the first part of the chromosome
constant). In addition, there is a very sharp valley
just before the ridge of optimum values indicating
the tricky nature of the fitness function. This sharp
valley just before the maximization ridge explains
the need for AIS like optimization strategy as it
provides a certain portion of randomly generated
solutions in every generation; making the EA fall
out of any local optima when stuck. The
combination of this ridge and valley also explains
why mutation during the EA was not performed in
the second half of the chromosome, as keeping the
job permutation constant and making minor
adjustments to the job distributions of the robot
would either have made minimal changes to the
fitness value (ridge) or had substantially increased
the fitness value (valley). Figure 7 provides the Best
so Far (BSF) and Average so Far (ASF) curves of
EA for different job distributions. The figure
represents a scenario having 30 jobs which are to be
distributed among 3 robots by the EA. The algorithm
takes around 500 generations with a population size
of 300 individuals to reach within 1% of the exact
solution provided by the combinatorial optimization
technique. The gap between ASF and BSF is due to
the 30% random individuals injected every
generation for better diversity.
Table 1: Fitness comparison of CPLEX with EA.
Figure 4: Distance matrix for 10 jobs.
Figure 5: Average number of generations taken by EA
with respect to accuracy.
Figure 6: Surface Plot for 30 Job Optimum Solution.
0
500
1000
1500
25%
20%
15%
10%
5%
1%
Average#ofGenerations
Takenfor30JobMRTA
Average#of
Generations
Takenfor30
JobMRTA
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
572
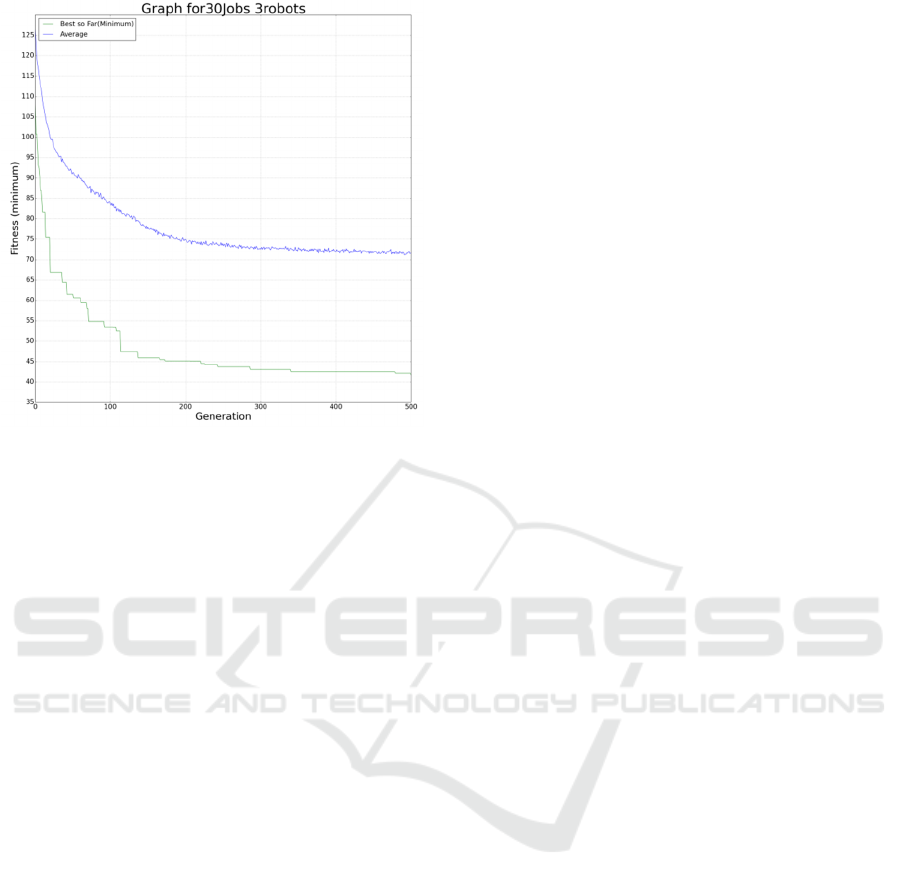
Figure 7: BSF and ASF Curves for a 30 Jobs 3 Robot ST-
SR-IA problem.
5 CONCLUSION AND FUTURE
WORK
The paper used MTSP based chromosome
representation to solve MRTA using EA. The results
were compared with exact mathematical solutions
obtained through CPLEX. EA provided an optimal
solution in each and every case and did it in an
acceptable number of generations. However, the
advantage EA has over combinatorial optimization
based techniques is that for dynamic environments,
such as a robot team executing tasks in real life
scenarios, the problem will not need remodeling if
minor changes occur in the structure of the problem.
Moreover, EA provide the flexibility of restarting
the optimization from the last solution in case the
last solution becomes invalid due to some structural
changes in the problem.
The future work will focus on using this same
MTSP representation for solving more complex
MRTA distributions. This will allow taking
advantage of EA for adjusting to changes made in
problem representation more flexibly as compared to
exact mathematical solutions.
REFERENCES
Al-Yafi, K., Lee, H., Mansouri, A., 2009. Mtap-masim: a
multi-agent simulator for the mobile task allocation
problem, in: Enabling Technologies: Infrastructures
for Collaborative Enterprises, 2009. WETICE’09. 18th
IEEE International Workshops on. IEEE, pp. 25–27.
Atay, N., Bayazit, B., 2006. Mixed-integer linear
programming solution to multi-robot task allocation
problem.
Badreldin, M., Hussein, A., Khamis, A., Badreldin, M.,
Hussein, A., Khamis, A., 2013. A Comparative Study
between Optimization and Market-Based Approaches
to Multi-Robot Task Allocation, A Comparative Study
between Optimization and Market-Based Approaches
to Multi-Robot Task Allocation. Adv. Artif. Intell.
Adv. Artif. Intell. 2013, 2013, e256524.
doi:10.1155/2013/256524, 10.1155/2013/256524
Berhault, M., Huang, H., Keskinocak, P., Koenig, S.,
Elmaghraby, W., Griffin, P., Kleywegt, A., 2003.
Robot exploration with combinatorial auctions, in:
Intelligent Robots and Systems, 2003.(IROS 2003).
Proceedings. 2003 IEEE/RSJ International Conference
on. IEEE, pp. 1957–1962.
Carter, A.E., 2003. Design and application of genetic
algorithms for the multiple traveling salesperson
assignment problem. Virginia Polytechnic Institute
and State University.
Carter, A.E., Ragsdale, C.T., 2006. A new approach to
solving the multiple traveling salesperson problem
using genetic algorithms. Eur. J. Oper. Res. 175, 246–
257.
Carter, A.E., Ragsdale, C.T., 2002. Scheduling pre-printed
newspaper advertising inserts using genetic
algorithms. Omega 30, 415–421.
Coltin, B., Veloso, M., 2010. Mobile robot task allocation
in hybrid wireless sensor networks, in: Intelligent
Robots and Systems (IROS), 2010 IEEE/RSJ
International Conference on. IEEE, pp. 2932–2937.
Czyzyk, J., Mesnier, M.P., Moré, J.J., 1998. The NEOS
server. IEEE Comput. Sci. Eng. 5, 68–75.
Dolan, E.D., 2001. NEOS Server 4.0 administrative guide.
ArXiv Prepr. Cs0107034.
Fourer, R., Gay, D.M., Kernighan, B.W., 1987. AMPL: A
mathematical programming language. Citeseer.
Gale, D., 1960. The theory of linear economic models.
University of Chicago press.
Garage, W., 2011. Turtlebot. Website Httpturtlebot
Comlast Visit. 11–25.
Gerkey, B.P., 2003. On multi-robot task allocation.
University of Southern California.
Gerkey, B.P., Matarić, M.J., 2004. A Formal Analysis and
Taxonomy of Task Allocation in Multi-Robot
Systems. Int. J. Robot. Res. 23, 939–954.
doi:10.1177/0278364904045564
Gerkey, B.P., Matarić, M.J., 2003. On role allocation in
RoboCup, in: Robot Soccer World Cup. Springer, pp.
43–53.
Gropp, W., Moré, J., 1997. Optimization environments
and the NEOS server. Approx. Theory Optim. 167–
182.
Hunsberger, L., Grosz, B.J., 2000. A combinatorial
auction for collaborative planning, in: MultiAgent
An Evolutionary Traveling Salesman Approach for Multi-Robot Task Allocation
573

Systems, 2000. Proceedings. Fourth International
Conference on. IEEE, pp. 151–158.
Hunt, J.E., Cooke, D.E., 1996. Learning using an artificial
immune system. J. Netw. Comput. Appl. 19, 189–212.
IBM CPLEX CP Optimizer [WWW Document], n.d. URL
https://www-
01.ibm.com/software/commerce/optimization/cplex-
cp-optimizer/ (accessed 10.23.16).
Jones, E.G., Dias, M.B., Stentz, A., 2011. Time-extended
multi-robot coordination for domains with intra-path
constraints. Auton. Robots 30, 41–56.
Junjie, P., Dingwei, W., 2006. An ant colony optimization
algorithm for multiple travelling salesman problem, in:
First International Conference on Innovative
Computing, Information and Control-Volume I
(ICICIC’06). IEEE, pp. 210–213.
Koenig, N., Howard, A., 2004. Design and Use Paradigms
for Gazebo, An Open-Source Multi-Robot Simulator,
in: In IEEE/RSJ International Conference on
Intelligent Robots and Systems. pp. 2149–2154.
Kose, H., Tatlidede, U., Meriçli, C., Kaplan, K., Akin,
H.L., 2004. Q-learning based market-driven multi-
agent collaboration in robot soccer, in: Proceedings of
the Turkish Symposium on Artificial Intelligence and
Neural Networks. pp. 219–228.
Martinson, E., Arkin, R.C., 2003. Learning to role-switch
in multi-robot systems, in: Robotics and Automation,
2003. Proceedings. ICRA’03. IEEE International
Conference on. IEEE, pp. 2727–2734.
Park, Y.-B., 2001. A hybrid genetic algorithm for the
vehicle scheduling problem with due times and time
deadlines. Int. J. Prod. Econ. 73, 175–188.
Parker, L.E., 1998. ALLIANCE: An architecture for fault
tolerant multirobot cooperation. IEEE Trans. Robot.
Autom. 14, 220–240.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A.Y., 2009. ROS: an open-
source Robot Operating System, in: ICRA Workshop
on Open Source Software. Kobe, Japan, p. 5.
Shea, P.J., Alexander, K., Peterson, J., 2003. Group
tracking using genetic algorithms. Proc Int. Soc. Inf.
Fusion.
Tang, F., Parker, L.E., 2005. Asymtre: Automated
synthesis of multi-robot task solutions through
software reconfiguration, in: Proceedings of the 2005
IEEE International Conference on Robotics and
Automation. IEEE, pp. 1501–1508.
Werger, B.B., Matarić, M.J., 2000. Broadcast of local
eligibility for multi-target observation, in: Distributed
Autonomous Robotic Systems 4. Springer, pp. 347–
356.
Yuan, S., Skinner, B., Huang, S., Liu, D., 2013. A new
crossover approach for solving the multiple travelling
salesmen problem using genetic algorithms. Eur. J.
Oper. Res. 228, 72–82.
Zlot, R., Stentz, A., 2006. Market-based multirobot
coordination for complex tasks. Int. J. Robot. Res. 25,
73–101.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
574
