
Hierarchical Self-organizing Maps System for Action Classification
Zahra Gharaee
1
, Peter G
¨
ardenfors
1
and Magnus Johnsson
1,2
1
Cognitive Science, Lund University, Helgonav
¨
agen 3, Lund, Sweden
2
Department of Intelligent Cybernetic Systems, NRNU MEPhI, Moscow, Russia
Keywords:
Self-organizing Maps, Neural Networks, Action Perception, Hierarchical Models.
Abstract:
We present a novel action recognition system that is able to learn how to recognize and classify actions. Our
system employs a three-layered neural network hierarchy consisting of two self-organizing maps together
with a supervised neural network for labelling the actions. The system is equipped with a module that pre-
processes the 3D input data before the first layer, and a module that transforms the activity elicited over time
in the first layer SOM into an ordered vector representation before the second layer, thus achieving a time
invariant representation. We have evaluated our system in an experiment consisting of ten different actions
selected from a publicly available data set with encouraging result.
1 INTRODUCTION
Humans increasingly interact with robotic systems.
Service robots that communicate and collaborate with
people can undertake tasks that stand-alone robots
cannot. In order to realize their full value, robots
will need to interact and work with people fluently.
The design of intelligent collaborative robots in open,
complex and changing environments where they are
expected to communicate, interact and work with pe-
ople presents great scientific challenges.
The success of the human-robot interaction de-
pends on the development of robust methods that ena-
ble robots to recognize and predict goals and intenti-
ons of other agents. Humans do this, to a large ex-
tent, by interpreting and categorizing the actions they
perceive. Hence, it is central to develop methods for
action categorization that can be employed in robotic
systems. This involves an analysis of on-going events
from visual data captured by cameras to track mo-
vements of humans and to use this analysis to iden-
tify actions. Modelling these tasks is also crucial in
a variety of other domains such as computer games,
surveillance, assisted living, ambient intelligence, and
decision support.
In this article, we present an action categorization
method that, at large, works like the human system.
Results from the cognitive sciences indicate that the
human brain performs a substantial information re-
duction when categorizing actions. In particular, (Jo-
hansson, 1973) patch-light technique for analyzing
biological motion is a source of inspiration for us. He
attached light bulbs to the joints of actors who were
dressed in black and moved in a dark room. The ac-
tors were filmed performing actions such as walking,
running, and dancing. Watching the films - in which
only the dots of light could be seen - subjects recog-
nized the actions within tenths of a second. Further
experiments by (Runesson and Frykholm, 1983), see
also (Runesson, 1994), have shown that subjects ex-
tract subtle details of the actions performed, such as
the gender of the person walking or the weight of ob-
jects lifted (where the objects themselves cannot be
seen). An important lesson to learn from the experi-
ments by Johansson and his followers is that the kine-
matics of a movement contains sufficient information
to identify the underlying dynamic patterns.
From a computational point of view, there are
many challenges that make the action recognition task
difficult to imitate artificially. For example, the acting
individuals differ in height, weight and bodily propor-
tions. Other important issues to be addressed are the
impact of the camera’s viewing angle and its distance
from the actor and the performance speed of the acti-
ons. In brief, categorizations of actions ought to be
invariant under distance, viewing angle, size of actor,
lighting conditions and temporal variations.
One idea for a model of actions comes from (Marr
and Vaina, 1982) and (Vaina, 1983), who extend
(Marr and Nishihara, 1978) cylinder models of ob-
jects to an analysis of actions. In Marr and Vaina’s
model, an action is described via differential equati-
Gharaee Z., GÃd’rdenfors P. and Johnsson M.
Hierarchical Self-organizing Maps System for Action Classification.
DOI: 10.5220/0006199305830590
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 583-590
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
583

ons for movements of the body parts of, for example,
a walking human. What we find useful in this model
is that a cylinder figure can be described as a vector
with a limited number of dimensions. Each cylinder
can be described by two dimensions: length and ra-
dius. Each joining point in the figure can be described
by a small number of coordinates for point of contact
and angle of joining cylinders. This means that, at a
particular moment, the entire figure can be written as
a (hierarchical) vector of a fairly small number of di-
mensions. An action then consists of a sequence of
such vectors. In this way, the model involves a consi-
derable reduction of dimensionality in comparison to
the original visual data.
This representation fits well into the general for-
mat of conceptual spaces presented by (G
¨
ardenfors,
2000) and (G
¨
ardenfors, 2007). From that theory we
borrow the idea that a concept, in this case a sequence
of bodily positions, form a convex region in action
space, see (G
¨
ardenfors, 2007), (G
¨
ardenfors, 2000)
and (G
¨
ardenfors and Warglien, 2012).
One may interpret here convexity as the assump-
tion that, given two actions in the region of an action
concept, any linear morph between those actions will
fall under the same concept. One way to support the
analogy between the thesis about properties and the
thesis about actions is to establish that action concepts
share a similar structure with object categories (He-
meren, 2008, p. 25). Indeed, there are strong reasons
to believe that actions exhibit many of the prototype
effects that (Rosch, 1975) presented for object catego-
ries. In a series of experiments, (Hemeren, 2008) sho-
wed that action categories show a similar hierarchical
structure and have similar typicality effects to object
concepts. He demonstrated a strong inverse correla-
tion between judgments of most typical actions and
reaction time in a word/action verification task.
We take inspiration from these models in the sense
that we represent actions as sequences of vectors and
aim to categorize an action on the basis of its simila-
rities to other actions. In our model, similarity is mo-
delled as closeness in Self-Organizing Maps, SOMs,
(Kohonen, 1988).
In the current study we have used an approach
similar to the one presented in (Buonamente et al.,
2016) in which we have done experiments employing
hierarchical SOMs for action recognition using 2D
movies as input. In this study instead our system uses
sequences of sets of 3D joint positions extracted from
the depth images captured by a 3D camera similar to
a kinect sensor. By using 3D input data the system
will receive more information from the actor’s spacial
trajectories and thus be able to exploit this informa-
tion for classifying actions with a significantly higher
performance as shown in the results. Moreover, in
this study we applied a pre-processing mechanism on
the 3D input data to make it independent of the ac-
tor’s orientation and distance to the camera while ex-
tracting the local interest points from the body of the
actor by applying an attentional mechanism. In this
way the system’s performance is improved.
One of our motivations for a SOM based approach
to action recognition is to achieve an ability to inter-
nally simulate (Hesslow, 2002) the likely continuation
of partly seen actions. This can be done by employing
Associative Self-Organizing Maps, A-SOMs, (Johns-
son et al., 2009), and have been investigated by using
2D movies as input in a number of studies (Johnsson
and Buonamente, 2012; Buonamente et al., 2013a;
Buonamente et al., 2013b; Buonamente et al., 2014;
Buonamente et al., 2015).
In the literature one finds several systems that can
categorize different sets of actions. Among them is
the one presented by (Li et al., 2010), which was eva-
luated by the MSR Action 3D dataset
1
. The same
dataset has also been employed by many other resear-
chers ((Xia et al., 2012);(Masood et al., 2013); (Orei-
fej et al., 2013); (Yang et al., 2012); (Wang et al.,
2012a); (Wang et al., 2012b); (Lo Presti et al., 2014)).
In this study, we have evaluated our action recogni-
tion system by actions from the the MSR Action 3D
dataset that are performed by the upper parts of the
body resulting in a more difficult classification task
for the system since the similarity between the acti-
ons (e.g, hand catch and high throw) increases. The
implementation of most of the code for the experi-
ments presented in this paper was done in C++ using
the neural modelling framework “Ikaros” (Balkenius
et al., 2010) and some in MatLab.
The rest of the paper is organized as follows: The
proposed architecture is presented in section 2. In
section 3, an experiment evaluating our action recog-
nition system is presented. Finally, section 4 conclu-
des the paper.
2 ARCHITECTURE
In this paper, we focus on the recognition of bodily
actions of one person. The architecture, Fig. 1, is
composed of three neural network layers. The first
layer consists of a SOM that develops a compressed
and ordered representation of the preprocessed input
(i.e. parts of the scaled postures in an egocentric
framework). The second layer consists of a second
1
The repository is available at
http://research.microsoft.com/en-us/um/people/zliu/
ActionRecoRsrc/
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
584

SOM. It receives ordered vectors that are spatialized
representations of the activity patterns elicited in the
first-layer SOM during actions. The ordered vector
representation of the sequence of unique activations
in the first layer provides a mechanism that makes the
system time invariant. This is possible because si-
milar movements carried out at different performance
speed will elicit similar sequences of unique activa-
tions in the first layer SOM. Thus the second layer
that receives these ordered vector representations will
learn to cluster complete actions. The third layer con-
sists of a custom made supervised neural network that
labels the activity in the second layer SOM with the
corresponding actions. The third layer could provide
some independence of the camera’s viewing angle,
but this is done more efficiently as a part of the pre-
processing, i.e. by scaling and transforming the sets
of joint positions into an egocentric framework before
they are received by the first layer SOM.
To evaluate the architecture, we used input data
composed of sequences of sets of 3D joint positions
obtained by a depth camera similar to the Kinect sen-
sor.
In the following subsections, the different layers
of the architecture will be described.
Figure 1: The three layer action recognition architecture.
The first layer consists of a SOM. Layer two consists of a
SOM, and layer 3 of a custom made supervised neural net-
work. The darker arrows in the SOM represent the activity
trace during the performance of an action.
Figure 2: Different sizes of body skeletons due to different
distances.
Figure 3: A sketch of a human body skeleton and the joints
received from the Kinect.
2.1 Preprocessing
Before entering the first-layer SOM, the input data
is preprocessed. The distance and the capturing an-
gle between the depth camera and the subjects per-
forming the actions may differ. This can partially
be handled by the three neural network layers in the
architecture, but by re-scaling and transforming the
joint positions into an egocentric coordinate system
the performance of the architecture can be improved.
Thus, first the joint positions in each posture frame
from the depth camera is re-scaled, Fig. 2, i.e. made
into a standard size. Then the coordinates of the joint
positions are transformed into a new and egocentric
coordinate system located close to joint number 7 of
the skeleton, Fig. 3.
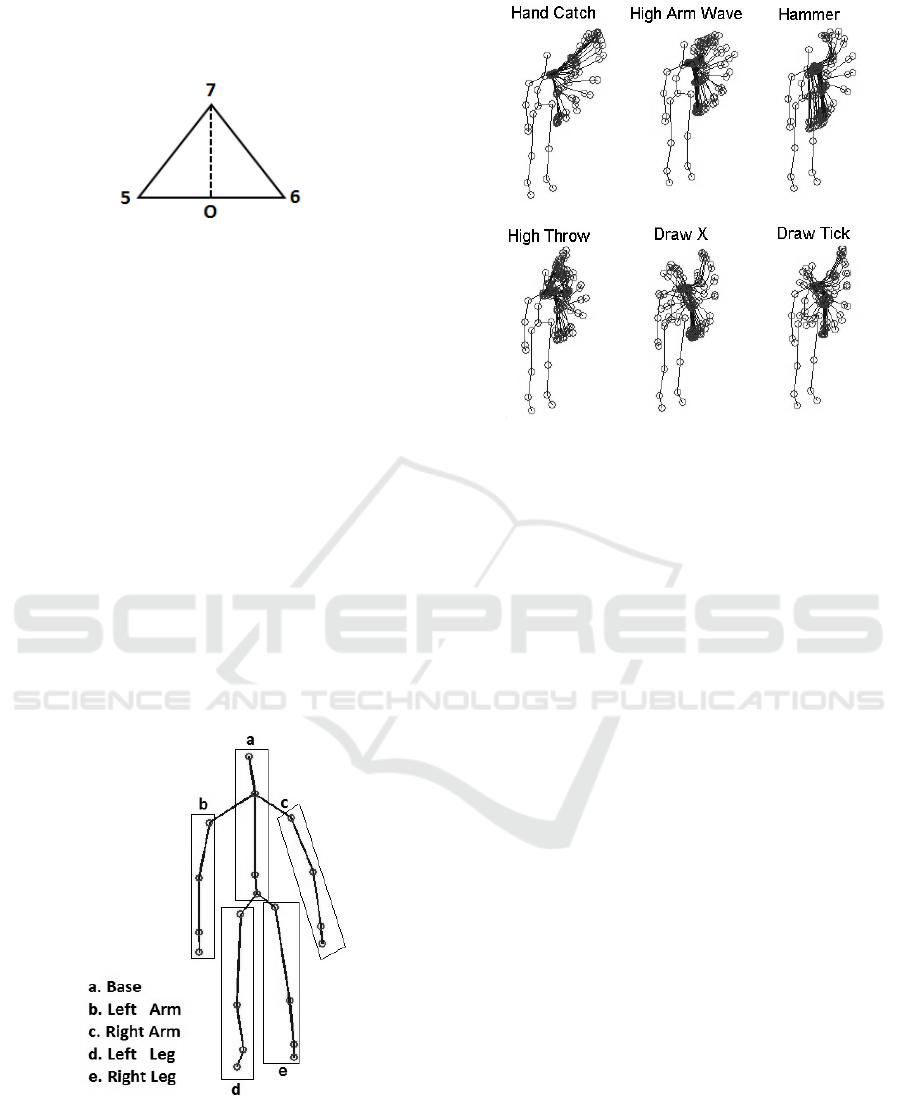
To calculate the axes of the egocentric coordinate
system, joints 5, 6 and 7 are used. As can be seen
in Fig. 4, these joints constitutes the vertices in a tri-
angle and the projection 0 of joint 7 on the side con-
necting joints 5 to 6 can be calculated. Then axes
originating in the point 0 along the line between the
point 0 and joint 7 and along the line between joints 5
and 6 can be selected together with an axis orthogo-
nal to the triangle for the new coordinate system and
Hierarchical Self-organizing Maps System for Action Classification
585
a transformation matrix (Craig, 1989) can be calcu-
lated, which enables all the joints to be expressed in
egocentric coordinates.
Figure 4: The joints used to calculate the egocentric coordi-
nate system.
Due to limitations in visual field, time, and pro-
cessing capacity, the entire input information cannot
always be processed in real time (Shariatpanahi and
Ahmadabadi, 2007). By using attention mechanisms,
performance can also be improved, e.g. in a driving
task (Gharaee et al., 2014) or in the case of action per-
ception in the current study. We applied an attentio-
nal mechanism to the part of the skeleton that exhibits
the largest movements, the influence of less relevant
parts of the input data can be decreased whereas the
influence of more relevant parts of input data in per-
forming an action are increased.
In our experiment, this was achieved by dividing
the skeletons into five basic parts, Fig. 5. The division
is based on how actions are performed in a human
body. The focus of attention is set to the moving part
which, in this dataset, is the left arm of the subjects.
This can be seen for one subject in Fig. 6.
Figure 5: The division of the skeleton into five basic parts.
2.2 The First and Second Layer SOMs
The first two layers of the architecture consist of
SOMs. The SOMs are trained using unsupervised
Figure 6: A visualization of the series of posture frames for
six of the ten actions performed by the first subject in the
first event in the dataset we used. The attention is focused
on the left arm of the actor.
learning to produce dimensionality reduced and dis-
cretized representations of their input spaces. These
representations preserve the topology of their corre-
sponding input spaces, which means that nearby parts
of the network will respond to similar input patterns,
reminiscent of the cortical maps found in mammalian
brains. The SOMs will therefore generate a measure
of similarity which is the founding property of a con-
ceptual space (G
¨
ardenfors, 2000). In other words, the
map generated by a SOM can be seen as a conceptual
space that is generated from the training data.
The topology-preserving property of SOMs is a
consequence of the use of a neighbourhood function
in the adaptation of the neuron responses, i.e. the
adaptation strength is a decreasing function of the dis-
tance of the most activated neuron in the network.
This also provides the SOM, and in the extension our
action recognition system, with the ability to genera-
lize learning to novel inputs. This is because similar
inputs elicit similar activities in the SOM. Thus simi-
lar sequences of postures will elicit similar sequences
of activity in the first layer SOM, and these will in turn
elicit similar activations in the second layer SOM.
The SOM consists of an I ×J grid of neurons with
a fixed number of neurons and a fixed topology. Each
neuron n
i j
is associated with a weight vector w
i j
∈
R
n
with the same dimensionality as the input vectors.
All the elements of the weight vectors are initialized
by real numbers randomly selected from a uniform
distribution between 0 and 1.
At time t each neuron n
i j
receives the input vector
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
586

x(t) ∈ R
n
. The net input s
i j
(t) at time t is calculated
using the Euclidean metric:
s
i j
(t) = ||x(t) − w
i j
(t)|| (1)
The activity y
i j
(t) at time t is calculated by using
the exponential function:
y
i j
(t) = e
−s
i j
(t)
σ
(2)
where σ is the exponential factor set to 10
6
and
0 ≤ i < I, 0 ≤ j < J, i, j ∈ N. The role of the exponen-
tial function is to normalize and increase the contrast
between highly activated and less activated areas.
The neuron n
c
with the strongest activation is se-
lected:
c = argmax
i j
y
i j
(t) (3)
The weights w
i jk
are adapted by
w
i jk
(t + 1) = w
i jk
(t) + α(t)G
i jc
(t)[x
k
(t) − w
i jk
(t)]
(4)
where 0 ≤ α(t) ≤ 1 is the adaptation strength,
α(t) → 0 when t → ∞. The neighbourhood function
G
i jc
(t) = e
−
||r
c
−r
i j
||
2σ
2
(t)
is a Gaussian function with a ra-
dius that decreases with time, and r
c
∈ R
2
and r
i j
∈ R
2
are location vectors of neurons n
c
and n
i j
respectively.
2.3 Ordered Vector Representation
The activity elicited in the first-layer SOM during the
sequence of preprocessed input corresponding to an
action is re-arranged into a spatial representation by a
process we call ordered vector representation before
entering the second-layer SOM. The ordered vector
representation process consists of building a vector
representation of the activity trajectory elicited in the
first layer SOM during an action. Since sufficiently
similar postures are represented by the same neuron,
a particular movement carried out at various speeds
will elicit an activity trajectory along the same path
in the first layer SOM. Since this path, which will be
similar for the same movement carried out at various
speeds by the performing agent (see Fig. 7), is what
is used to build the input vector for the second layer
SOM, time invariance is achieved.
The ordered vector representation in this experi-
ment works as follows. The length of the activity trace
of an action ∆
j
is calculated by
∆
j
=
N−1
∑
i=1
||P
i+1
− P
i
||
2
(5)
Figure 7: The activity trajectory in the first layer SOM du-
ring an action carried out at two different speeds.
where N is the total number of centres of activity
for action sequence j and P
i
is the ith centre of activity
in the same action sequence.
Suitable lengths of segments to divide the activity
trace for action sequence j in the first layer SOM are
calculated by
d
j
= ∆
j
/N
Max
(6)
where N
Max
is the longest path in the first layer
SOM elicited by the M actions in the training data.
Each activity trace in the first layer SOM, elici-
ted by an action, is divided into d
j
segments, and the
coordinates of the borders of these segments in the
order they appear from the start to the end on the acti-
vity trace are composed into a vector used as input to
the second-layer SOM.
2.4 Output Layer
The output layer receives the activity of the second
layer SOM as input and consists of an I × J grid of a
fixed number of neurons with a fixed topology. Each
neuron n
i j
is associated with a weight vector w
i j
∈ R
n
.
All the elements of the weight vector are initialized
by real numbers randomly selected from a uniform
distribution between 0 and 1.
At time t each neuron n
i j
receives an input vector
x(t) ∈ R
n
.
The activity y
i j
(t) at time t in the neuron n
i j
is
calculated using the standard cosine metric:
y
i j
(t) =
x(t) · w
i j
(t)
||x(t)||||w
i j
(t)||
(7)
During the learning phase the weights w
i jl
are
adapted by
w
i jl
(t + 1) = w
i jl
(t) + βx
l
(t)[y
i j
(t) − d
i j
(t)] (8)
where β is the adaptation strength and d
i j
(t) is the
desired activity for the neuron n
i j
. The desired acti-
vity is the activity pattern in the output layer that cor-
responds to the unambiguous recognition of the on-
going action.
Hierarchical Self-organizing Maps System for Action Classification
587

3 EXPERIMENT
We have evaluated our action recognition architec-
ture, Fig. 1, in an experiment in which we used joint
positions obtained by a depth camera, similar to a Ki-
nect sensor (Wan, 2015). In this experiment we tes-
ted the ability of the architecture to categorize acti-
ons based on sequences of sets of joint positions. The
employed dataset contains 276 samples with 10 dif-
ferent actions performed by 10 different subjects in 2
to 3 different events. Each action sample is composed
of a sequence of frames where each frame contains
20 joint positions, Fig. 3, expressed in 3D cartesian
coordinates. The actions are: 1. High Arm Wave, 2.
Horizontal Arm Wave, 3. Hammer, 4. Hand Catch, 5.
Forward Punch, 6. High Throw, 7. Draw X, 8. Draw
Tick, 9. Draw Circle, 10. Tennis Swing.
Figure 8: Examples of some of the activity traces in the first
layer SOM elicited by the training data for the action for-
ward punch. As can be seen, the activity traces elicited by a
particular action in the first layer SOM can be grouped into
subclasses of typical patterns. In the figure these subclasses
are indicated by numbers. The reason to why there are se-
veral typical patterns is that an action can be carried out in
multiple ways. For example, different subjects might have
different typical ways of carrying out the same action.
Figure 9: Examples of activity traces in the first layer SOM
elicited by the test data for the action forward punch. The
numbers indicate what subclass the patterns belong to.
For the experiment, the dataset was split into a
training set containing 80% of the action instances
randomly selected from the original dataset and a test
set containing the remaining 20% of the instances.
Then the architecture was trained with randomly se-
lected instances from the training set in two phases,
the first to train the first-layer 30 × 30 neurons SOM,
and the second to train the second layer 35 × 35 neu-
rons SOM and the output layer containing 10 neurons.
Fig. 8 shows examples of activity traces in the first
layer SOM elicited by the training data for the action
forward punch, and Fig. 9 shows examples of activity
traces in the first layer SOM elicited by the test data
for the action forward punch.
The activity traces in the first layer SOM are clus-
tered in the second layer SOM. Each action appears
to be mapped into two or three clusters. The result of
the supervised third layer neural network, which la-
bels the clusters in the second layer SOM, is shown
in Fig. 10. As can be seen, 83% of the test actions
are correctly categorized. Fig. 11 shows the categori-
zation result for each of the ten actions. As shown in
Fig. 11 four actions among the ten are classified com-
pletely correct with 100% accuracy. The performance
of the system decreases when the similarity between
different actions increases, and it occurs when these
actions are performed in a more similar way in most
of the sequences. This case can be seen in the actions
hand catch and high throw or the actions hammer and
forward punch which as a consequence receive lower
performance of classification.
As shown in Fig. 10, we improved the action re-
cognition performance of hierarchical SOM system
from around 50% in the (Buonamente et al., 2016),
to 83% in this study. The result also shows a signifi-
cant improvement to the state-of-the-art method in (Li
et al., 2010) from 74.7% recognition accuracy to 83%
. Our system outperforms several other studies inclu-
ding ((Xia et al., 2012);(Masood et al., 2013); (Yang
and Tian, 2012); (Lo Presti et al., 2014)). In our ap-
proach, we use a learning mechanism based on self
organizing neural networks both as a descriptor for
action recognition or unique feature extraction in the
first layer and as a classifier in the second layer. It re-
presents the flexibility and robustness of SOM archi-
tecture which can be utilized to satisfy different go-
als. Moreover, by applying SOM in the first layer we
could easily build a compact representation of postu-
res into a set of action patterns which help us to face
the problem of high dimensionality of the input data.
By applying ordered vector representation on the pat-
terns we invented a time invariant representation of
actions to deal with another condition in a real situa-
tion in which different actions are composed of diffe-
rent number of posture frames and could elicit diffe-
rent number of activated neurons in SOM.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
588
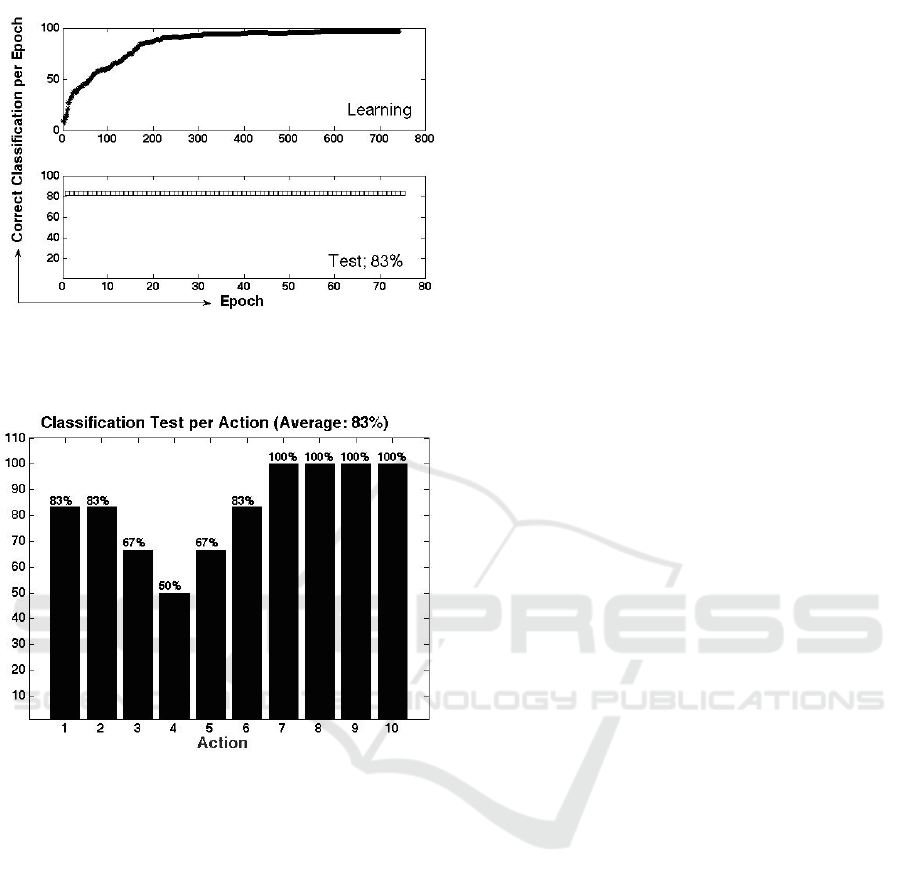
Figure 10: The result of the supervised third layer neural
network in the experiment using sequences of joint positi-
ons as input.
Figure 11: The categorization result for each of the ten acti-
ons in the experiment using sequences of joint positions as
input. The actions are: 1. High Arm Wave, 2. Horizontal
Arm Wave, 3. Hammer, 4. Hand Catch, 5. Forward Punch,
6. High Throw, 7. Draw X, 8. Draw Tick, 9. Draw Circle,
10. Tennis Swing.
4 CONCLUSIONS
In this article we have presented a three layered hier-
archical SOM based architecture for action recogni-
tion. The architecture is inspired by findings concer-
ning human action perception, in particular those of
(Johansson, 1973). The first layer in the architecture
consists of a SOM. The second layer is also a SOM,
and the third layer is a custom made supervised neural
network.
The experiment tested the architecture’s ability to
categorize actions based on input sequences of 3D
joint positions. The primary goal of the architec-
ture is to categorize human actions. As in prototype
theory, the categorization in our system is based on
similarities of actions, and similarity is modelled in
terms of distances in SOMs. In this sense, our cate-
gorization model can be seen as an implementation
of the conceptual space model of actions presented
in (G
¨
ardenfors, 2007) and (G
¨
ardenfors and Warglien,
2012). We believe that attention plays an important
role in selecting what information is most relevant in
the process of action recognition, and our experiment
is a way of testing this hypothesis. The hypothesis
should, however, be tested with further datasets in or-
der to be better evaluated.
We have previously tested our action recognition
architecture when trained to recognize manner and re-
sult actions performed online in real time by a human
performer in front of the system’s Kinect sensor (Gha-
raee et al., 2016) (demo movies are available at the
web site http://magnusjohnsson.se/ar.html).
A model of action categorization based on pat-
terns of forces is presented in (G
¨
ardenfors, 2007) and
(G
¨
ardenfors and Warglien, 2012). Extending the ar-
chitecture to also taking into account forces by consi-
dering the second order dynamics (corresponding to
sequences of joint accelerations) should improve the
performance even more. We will explore this in the
future. The data we have tested comes from human
actions. The generality of the architecture allows it to
be applied to other forms of motion involving animals
and artefacts. This is another area for future work.
REFERENCES
Balkenius, C., Mor
´
en, J., Johansson, B., and Johnsson, M.
(2010). Ikaros: Building cognitive models for robots.
Advanced Engineering Informatics, 24(1):40–48.
Buonamente, M., Dindo, H., and Johnsson, M. (2013a). Re-
cognizing actions with the associative self-organizing
map. In Information, Communication and Automation
Technologies (ICAT), 2013 XXIV International Sym-
posium on, pages 1–5. IEEE.
Buonamente, M., Dindo, H., and Johnsson, M. (2013b). Si-
mulating actions with the associative self-organizing
map. In Proceedings of the International Workshop
on Artificial Intelligence and Cognition (AIC 2013).
Buonamente, M., Dindo, H., and Johnsson, M. (2014).
Action recognition based on hierarchical self-
organizing maps. In Proceedings of the Internatio-
nal Workshop on Artificial Intelligence and Cognition
(AIC 2014).
Buonamente, M., Dindo, H., and Johnsson, M. (2015).
Discriminating and simulating actions with the as-
sociative self-organizing map. Connection Science,
27(2):118–136.
Buonamente, M., Dindo, H., and Johnsson, M. (2016).
Hierarchies of self-organizing maps for action recog-
nition. Cognitive Systems Research, 39:33–41.
Hierarchical Self-organizing Maps System for Action Classification
589

Craig, J. J. (1989). Introduction to Robotics: Mechanics
and Control. Addison- Wesley, Longman Publishing
Co, Boston, MA, USA.
G
¨
ardenfors, P. (2000). Conceptual Spaces: The Geometry
of Thought. Cambridge, Massachussetts: The MIT
Press.
G
¨
ardenfors, P. (2007). Representing actions and functio-
nal properties in conceptual spaces. In Body, Lan-
guage and Mind, volume 1, pages 167–195. Mouton
de Gruyter, Berlin.
G
¨
ardenfors, P. and Warglien, M. (2012). Using conceptual
spaces to model actions and events. Journal of Seman-
tics, 29:487–519.
Gharaee, Z., Fatehi, A., Mirian, M. S., and Ahmadabadi,
M. N. (2014). Attention control learning in the deci-
sion space using state estimation. International Jour-
nal of Systems Science (IJSS), pages 1–16. DOI:
10.1080/00207721.2014.945982.
Gharaee, Z., G
¨
ardendors, P., and Johnsson, M. (2016).
Action recognition online with hierarchical self-
organizing maps. In Proceedings of the International
Workshop on Human Tracking and Behaviour Analy-
sis (HTBA2016).
Hemeren, P. E. (2008). Mind in Action. PhD thesis, Lund
University Cognitive Science. Lund University Cog-
nitive Studies 140.
Hesslow, G. (2002). Conscious thought as simulation of be-
haviour and perception. Trends in Cognitive Sciences,
6:242–247.
Johansson, G. (1973). Visual perception of biological mo-
tion and a model for its analysis. Perception & Psy-
chophysics, 14(2):201–211.
Johnsson, M., Balkenius, C., and Hesslow, G. (2009). Asso-
ciative self-organizing map. In Proceedings of IJCCI,
pages 363–370.
Johnsson, M. and Buonamente, M. (2012). Internal simula-
tion of an agent’s intentions. In Proceedings of the Bi-
ologically Inspired Cognitive Architectures 2012, pa-
ges 175–176.
Kohonen, T. (1988). Self-Organization and Associative Me-
mory. Springer Verlag.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points. In Computer Vision and
Pattern Recognition Workshops (CVPRW), 2010 IEEE
Computer Society Conference on, IEEE, pages 9–14.
Lo Presti, L., La Cascia, M., Sclaroff, S., and Camps, O.
(2014). Gesture modeling by hanklet-based hidden
markov model. In Asian Conference on Computer Vi-
sion (ACCV).
Marr, D. and Nishihara, K. H. (1978). Representation
and recognition of the spatial organization of three-
dimensional shapes. Proceedings of the Royal Society
in London, B, 200:269–294.
Marr, D. and Vaina, L. (1982). Representation and recogni-
tion of the movements of shapes. Proceedings of the
Royal Society in London, B, 214:501–524.
Masood, S., Ellis, C., Tappen, M., LaViola, J., and Sukt-
hankar, R. (2013). Exploring the trade-off between
accuracy and observational latency in action recogni-
tion. International Journal of Computer Vision, 101.
Oreifej, O., Liu, Z., and Redmond, W. (2013). Hon4d: His-
togram of oriented 4d normals for activity recognition
from depth sequences. Computer Vision and Pattern
Recognition.
Rosch, E. (1975). Cognitive representations of semantic
categories. Journal of Experimental Psychology: Ge-
neral, 104:192–233.
Runesson, S. (1994). Perception of biological motion: The
ksd-principle and the implications of a distal versus
proximal approach. In Perceiving Events and Objects,
pages 383–405. Hillsdale, NJ.
Runesson, S. and Frykholm, G. (1983). Kinematic specifi-
cation of dynamics as an informational basis for per-
son and action perception. expectation, gender recog-
nition, and deceptive intention. Journal of Experimen-
tal Psychology: General, 112:585–615.
Shariatpanahi, H. F. and Ahmadabadi, M. N. (2007). Bio-
logically inspired framework for learning and abstract
representation of attention control. Attention in cogni-
tive systems, theories and systems from an interdisci-
plinary viewpoint, 4840:307 – 324.
Vaina, L. (1983). From shapes and movements to objects
and actions. Synthese, 54:3–36.
Wan, Y. W. (accessed 2015). Msr action recognition data-
sets and codes.
Wang, J., Liu, Z., Chorowski, J., Chen, Z., and Wu, Y.
(2012a). Robust 3d action recognition with random
occupancy patterns. In Computer Vision-ECCV, pa-
ges 872–885.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012b). Mining
actionlet ensemble for action recognition with depth
cameras. In Computer Vision and Pattern Recognition
(CVPR) 2012 IEEE Conference on, pages 1290–1297.
Xia, L., Chen, C.-C., and Aggarwal, J. (2012). View in-
variant human action recognition using histograms of
3d joints. In IEEE Computer Society Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 20–27.
Yang, X. and Tian, Y. (2012). Eigenjoints-based action re-
cognition using nave-bayes-nearest-neighbor. In IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW), pages
14–19. DOI: 10.1109/CVPRW.2012.6239232.
Yang, X., Zhang, C., and Tian, Y. (2012). Recognizing
actions using depth motion maps-based histograms of
oriented gradients. In Proceedings of the 20th ACM
international conference on Multimedia, ACM, pages
1057–1060.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
590
