Fast Polarization Switch for Polarization-based Quantum
Communication
Vinicius M. Lima, Gustavo C. Amaral, Felipe Calliari, Guilherme P. Tempor
˜
ao,
Jean Pierre von der Weid, Joaquim D. Garcia and Jo
˜
ao Pedro Garcia
Center for Telecommunication Studies, Pontifical Catholic University of Rio de Janeiro, Rio de Janeiro 22451-900, Brazil
Keywords:
Polarization Switching, FPGA, Polarimeter.
Abstract:
We present a complete optoelectronic unit for polarization visualization, switching and control. The system is
based on a Field Programmable Gate Array (FPGA) unit and comprises: an acquisition unit containing an ana-
log polarimeter and digital-to-analog converters; an FPGA capable of implementing an optimal algorithm for
three-stage arbitrary polarization tracking; and an electronic driver with analog-to-digital converters capable
of interfacing with Lithium-Niobate-based Polarization Controllers. The results, determined via simulation of
real-parameter devices, show that fast polarization switch is achievable.
1 INTRODUCTION
Polarization stabilization and control is a matter of
particular interest in the area of quantum commu-
nication mainly due to the possibility of encoding
qubits in polarization states (Gisin et al., 2002). Re-
cently, quantum communication protocols based on
two-photon interference have been given a lot of at-
tention, specially with the advent of the Measurement
Device Independent Quantum Key Distribution Pro-
tocol (Lo et al., 2012). This protocol, in particular,
makes use of the photon-bunching effect in a Bell-
State Projection (BSP) which is highly dependent on
the indistinguishability between quantum states and,
thus, on the aligned polarization states at the BSP
(Ferreira da Silva et al., 2013). Therefore, polariza-
tion stabilization along the quantum channel becomes
an important issue.
Recently, a scheme for active polarization stabi-
lization along the optical quantum channel employ-
ing current optical fibre technology has been success-
fully demonstrated (Xavier et al., 2008; da Silva et al.,
2012). Such scheme makes use of a reference laser
which is launched in the fiber in a DWDM channel ad-
jacent to that of the quantum communication channel
in a counter-propagating manner, such that the trans-
mitter receives the reference signal from the receiver
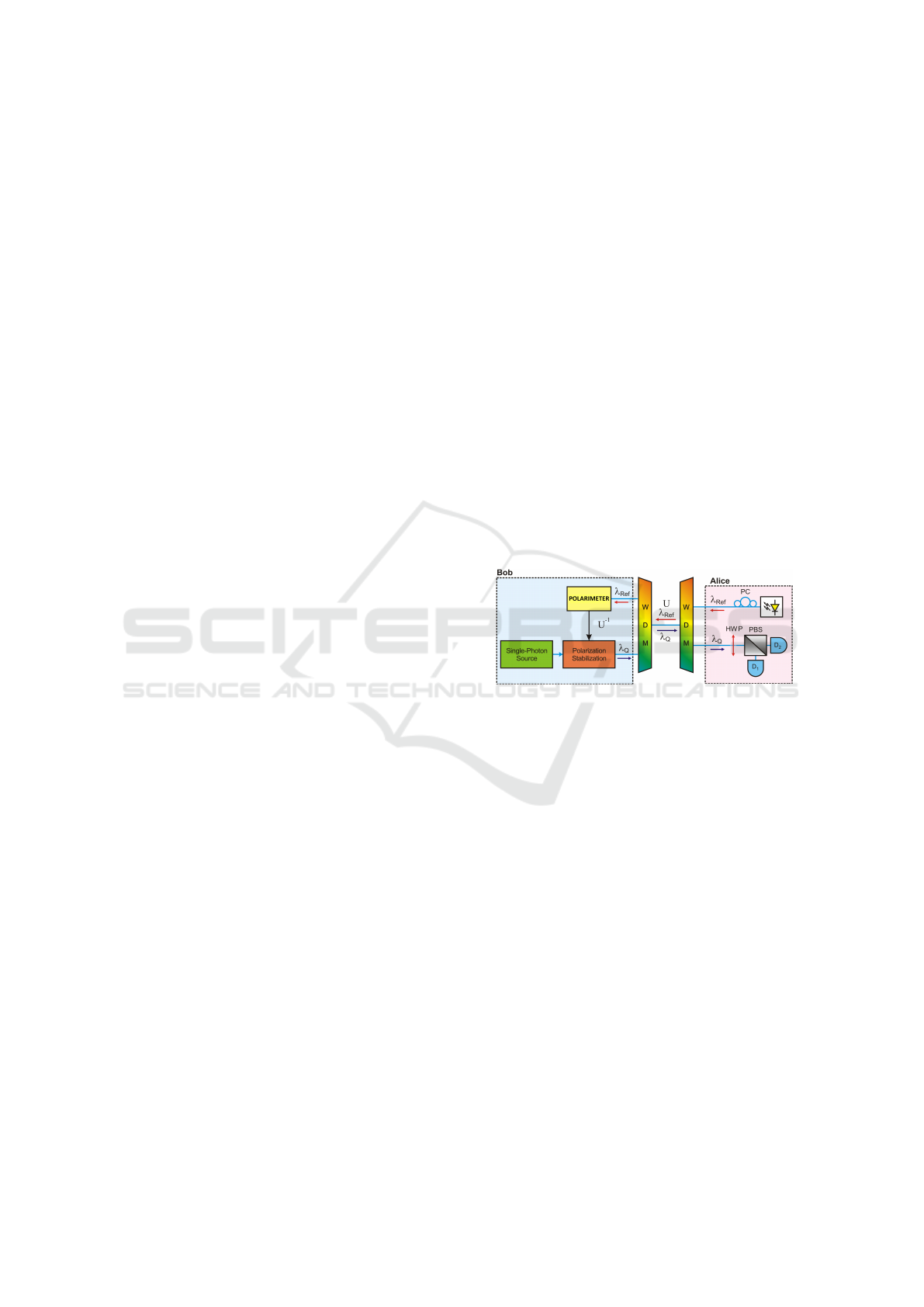
(Xavier et al., 2008). A simplified scheme of the pro-
posed system is depicted in Fig.1.
By rotating the received polarization state to
match what should be its original state, the transmitter
Figure 1: Simplified setup for on-time polarization tracking
in wavelength multiplexed optical quantum channels.
gains access to the optical link transfer function and
can produce the inverse transformation on the outgo-
ing optical pulses (Xavier et al., 2008). Not only the
polarization has been shown to stabilize during long-
term communication periods but it was also proven
that the noise contribution from the adjacent counter-
propagating channels was negligible, enabling the use
of the technique in quantum communication channels
(Xavier et al., 2008).
However efficient, the polarization control en-
forced by the system described above only enables
the stabilization of the polarization state rather than
its fast switching. As the quantum states must be en-
coded in the polarization, the rapid switching between
polarization states becomes a rather important task,
even more when the mathematical security proofs for
quantum communication channels rely on the rate of
secret key generation (Ma et al., 2005; L
¨
utkenhaus,
2000). By associating the polarization stabilization
setup proposed in (Xavier et al., 2008) and an ac-
tive feedback system based on a sample of the out-
going polarization state, a mixed analog-digital polar-
288
Lima V., Amaral G., Calliari F., TemporÃ
ˇ
co G., von der Weid J., D. Garcia J. and Pedro Garcia J.
Fast Polarization Switch for Polarization-based Quantum Communication.
DOI: 10.5220/0006212202880293
In Proceedings of the 5th International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS 2017), pages 288-293
ISBN: 978-989-758-223-3
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ization switch is proposed. The scheme is supposed
to rapidly switch between arbitrary polarization states
whilst protecting the quantum state alignment from
fluctuations of the optical channel, a claim supported
by the numerical simulation results of each individual
system that comprise the main unit.
The paper is divide as follows. In Section II, the
mathematical formalism necessary to represent states
of polarization and the lithium-niobate-based polar-
ization controller is presented. In Section III, the in-
dividual units are detailed and the complete optoelec-
tronic polarization switch unit is presented. The sim-
ulation results and discussions appear in Section IV.
Finally, in Section V, the conclusions are drawn and
the real implementation of the envisioned system is
discussed.
2 THEORETICAL
FORMULATION
2.1 Mathematical Representation of
Polarization
The state of polarization of light has been represented
mathematically as Jones Vectors and Stokes Vectors
(Saleh et al., 1991). Even though the conversion be-
tween these two representations require straightfor-
ward computations, we shall stick to the Stokes rep-
resentation since visualization in the Poincar
´
e Sphere
is direct (Saleh et al., 1991). Stokes vectors are 4-
dimensional vectors that carry information about the
State of Polarization (SOP) of light. Since the first
component (S
0
) is associated to the total light inten-
sity, it is common to normalize the Stokes Vector by
dividing all of its entries by S
0
. In the case of po-
larized light, the 3-dimensional Stokes Vector formed
of the remaining three normalized components of the
former 4-dimensional vector, has norm 1. Indeed, the
degree of polarization of light is given by the norm
of the Stokes vector. Assuming that light is polar-
ized enables one to simplify the representation. The
usual representation of the 3-dimensional normalized
Stokes vector, assuming polarized light (and, hence
norm 1), is a point in the 3-sphere known as the
Poincar
´
e Sphere. Since all SOPs are mapped bijec-
tively in the 3-sphere, we shall treat, from now on, an
SOP as a point in the 3-sphere.
SOP changes that do not affect the light intensity
can be represented by rotations in 3-space. These
rotations are a class of unitary transformations and
can be represented by orthonormal matrices (Strang,
2009). The rotation matrix in 3-space has a very in-
teresting characterization via the Spectral Theorem: it
always has 3 eigenvalues (since they are normal); all
of the eigenvalues have norm 1; one of the eigenvalues
is always equal to 1 and its eigenvector is the rotation
axis, e; the remaining eigenvalues are complex conju-
gate numbers whose real part correspond to the cosine
of the rotation angle, θ, and whose imaginary part cor-
respond to the sine of the rotation angle. A simple and
robust way of manipulating 3-space rotation matrices
is through the quaternions number system (Karlsson
and Petersson, 2004; Garcia and Amaral, 2016). De-
spite the fact that polarisers affect the light intensity
and, as such, cannot be represented by orthonormal
matrices, they can be represented by projection matri-
ces.
2.2 Lithium-niobate-based Polarization
Controller Characteristics
Literature around polarization control is very rich
and diverse techniques were proposed and verified
over the last years (Heismann, 1994) (Imai et al.,
1985)(No
´
e et al., 1988) (Heismann, 1989). Our
methodology focuses on the electro-optic LiNbO
3
EOSpace Polarization Controller Module (PCM)
which is available commercially as a multi-stage com-
ponent to which the input voltage may vary within a
±70 Volts range (Saleh et al., 1991).
A single stage of the PCM has 3 electrodes
(EOSpace, ) and realizes an arbitrary Linear Retarder.
A linear retarder is a linear wave-plate capable of in-
ducing a relative phase difference between the two po-
larization axes. This accomplished through the bire-
fringent characteristic of the wave-plate, which cause
two orthogonal polarization axes to experiment differ-
ent indexes of refraction while traversing the material.
The difference in propagation time is, thus, responsi-
ble for enforcing the relative phase shift between po-
larization axes.
Linear Retarders have a main polarization axis,
also known as eigen-mode, e ∈ {v ∈ R
3
|z = 0}, and a
characteristic phase delay, θ ∈ [0,2π). It is possible to
show that, by changing the eigen-mode and the phase
delay of a linear retarder, one can shift from one SOP
to any other SOP (Garcia and Amaral, 2016). In order
to set the eigen-mode to e = (cos(α/2),sin(α/2),0)
and the phase delay to θ = 2πδ the electrodes volt-
ages of the lithium-niobate-based PCM must be set to
(EOSpace, ):
V
a
= 2V
0
δ sin (α) −V
π
δ cos (α) +V
b
a
(1)
V
b
= 0 (2)
V
c
= 2V
0
δ sin (α) −V
π
δ cos (α) +V
b
c
(3)
Fast Polarization Switch for Polarization-based Quantum Communication
289

where V
π
is the voltage required to induce a 180
o
phase shift between the TE and TM modes for a sin-
gle stage, V
0
is the voltage required to rotate all power
from the TE to the TM mode, or vice versa, for a
single stage, and V
b
a
and V
b
c
are the bias voltages re-
quired on electrodes A and C, respectively, in order
to achieve zero birefringence between the TE and TM
modes (EOSpace, ). Even though the data-sheet of
the device provides the voltage range for V
0
, V
π
,V
b
a
and V
b
c
, their actual values for an arbitrary stage must
be determined via a calibration procedure.
Algorithms for both the calibration procedure
and for identifying the required rotation in order to
achieve a desired polarization state at the output of
the polarization controller are presented in (Xi et al.,
2010) (Garcia and Amaral, 2016). We shall focus on
the hardware implementation of the control system.
3 OPTOELECTRONIC SETUP
PROPOSAL
The representation of a polarization state in the
Poincar
´
e Sphere is achieved by measuring the Stokes
vector of the incident light, which can be performed
in a number of ways with either a set of optical split-
ters, wave plates and detectors or with a polarization
rotator and a polarization state reference (Saleh and
Teich, 2007). The proposed architecture makes use
of the FPGA-based polarimeter for polarization state
visualization proposed in (Calliari et al., 2014). The
FPGA’s internal schematic is presented in Fig.2.
Figure 2: Block diagram of the FPGA’s internal structure
for polarization visualization. The results acquired by the
polarimeter are sent to the FPGA and the result is displayed
graphically.
The polarimeter measures the intensities on each
of the three main polarization basis, the rectilinear, di-
agonal, and circular basis, from which one is capable
of determining the corresponding Stokes vector. The
measurement is represented by a voltage value, which
is sent to an Analog-to-Digital Converter (ADC) so
the digitized values can be interpreted by the FPGA.
Inside the FPGA structure, a series of sub-blocks per-
form the signal interpretation: the Int to Float block is
responsible for representing the digitized voltage val-
ues as floating point numbers; the AD to Volts block
converts the digitized values back to their original
voltage values represented as a floating point number;
the Calibration Matrix block permits one to associate
the voltage value measured by the polarimeter to each
of the four un-normalized entries of the Stokes vector
(this block is dependent on the device and on the op-
erating wavelength); up to the Normalize block, the
digital structure deals with the 4-dimensional Stokes
vector, but after they are normalized, we need only to
deal with the 3-dimensional vector; the Isometric Ma-
trix block enables the 2-dimensional visualization of
the Poincar
´
e Sphere; the remaining Correct and Off-
set blocks associate the pixels in the graphic display
with the values of the SOP vector.
The goal is to combine the setups of Figs. 1 and
2 in a feedback loop enabling visualization and con-
trol of the output SOP (Garcia and Amaral, 2016).
The electronic implementation of the feedback sys-
tem, depicted in Fig. 3, is composed of: an analog
polarimeter; an array of analog-to-digital converters
(ADC); an FPGA unit; an array digital-to-analog con-
verters (DAC); an electronic driver unit; a Lithium-
Niobate-based PCM; and a power supply.
Figure 3: Mixed analog-digital feedback loop for polariza-
tion visualization, selection, and stabilization.
Running in parallel inside the FPGA is the algo-
rithm developed in (Garcia and Amaral, 2016). The
algorithm takes the current state of polarization and
the target state of polarization as inputs and attempts
to output voltage levels which perform a rotation (ac-
cording to the equations describing the PCM behav-
ioral) so that the current and target SOPs match each
other. The electronic driver that follows the DAC
guarantees that the low power signals sent from the
FPGA are converted to match the Lithium-Niobate
based PCM. Each stage of the PCM demands two
electronic drivers capable of reaching an output volt-
age swing between ±70 Volts for which the full elec-
trical schematic of a single driver stage is presented in
Fig. 4.
The setup presented in Fig.3 is suited for classical
communication channels since a sample of the out-
PHOTOPTICS 2017 - 5th International Conference on Photonics, Optics and Laser Technology
290
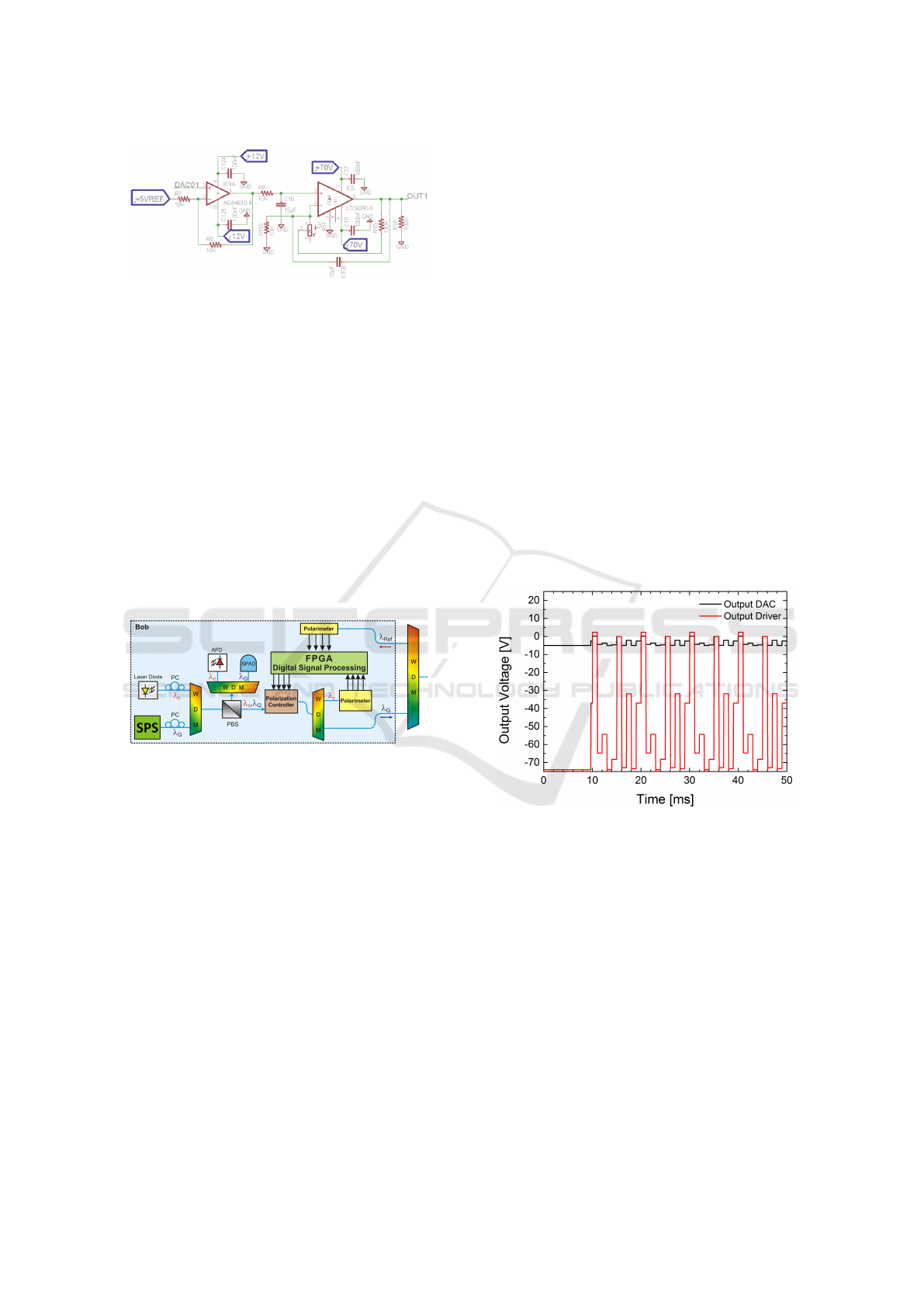
Figure 4: Electronic schematic of a single ±70 Volts driver
stage of the lithium-niobate-based PCM.
put signal can be measured by the polarimeter. When
one is interested in transmitting quantum states, as for
quantum communication purposes, however, the state
cannot be measured without being destroyed. Also, a
sample of the quantum state cannot be taken. Thus,
a different approach should be considered: the mea-
sured polarization state cannot be a sample of the out-
going quantum state so it must be a classical state.
It should, however, be polarization-aligned with the
outgoing quantum state so, by measuring the classi-
cal state, one gains information over the polarization
state of the outgoing quantum state. If we suppose the
quantum state is generated by an ideal single-photon
source (SPS), the block diagram depicted in Fig. 5
should be able to perform its polarization control.
Figure 5: Proposed full polarization stabilization and selec-
tion scheme for quantum communication channels. SPS:
Single-Photon Source; WDM: Wavelength Division Mul-
tiplexer; PBS: Optical Polarizing Beam Splitter; APD:
Avalanche Photodiode SPAD: Single-Photon Avalanche
Photodiode; PC: Mechanical Polarization Controller.
In the input of the polarization control setup, a
reference optical signal from a tunable laser diode is
directed to a WDM combiner together with the out-
put of the SPS. It is important that each source oc-
cupies different WDM channels so they can be mul-
tiplexed and later demultiplexed. A polarizing beam
splitter (PBS) is then connected to the output of the
WDM to act as a polarization aligner. By minimiz-
ing the outputs from detectors SPAD
ad j
and APD
ad j
,
the alignment of the polarization states of both chan-
nels at the remaining PBS output arm is enforced
(Amaral et al., 2016). The polarization-aligned chan-
nels are then directed to a PCM where they experi-
ment the same polarization rotation given the wave-
lengths do not differ greatly (Xavier et al., 2008). The
polarization-rotated signals are divided by a WDM
splitter so λ
Q
is directed to the output of Bob’s station
and λ
C
is directed to the mixed analog-digital feed-
back system. Combining the information of which
polarization state should be keyed at the output and
how the optical channel influences the polarization
of light, the outgoing state is composed. Note that
the quantum state is not measured at any time in the
polarization control system and we infer its polariza-
tion state taking the measurement over the classical
polarization-aligned state as a reference.
4 RESULTS
The simulation results were acquired using the Spice
simulation tool. All the electronic devices were re-
placed by their real-parameter model which take into
account the supply saturation, frequency response
(slew-rate), and gain limitations. In Fig. 6, we de-
pict the simulation results for various digital inputs at
the DAC and the corresponding output from both the
DAC and the power driver.
Figure 6: Voltage swing at the driver output as a function of
the DAC output. The FPGA is responsible for configuring
the DAC output.
We observe that the voltage swing is respected
by the power driver unit. An important information,
however, is the one regarding the switching time be-
tween one voltage level to the other since, ultimately,
it determines our maximum achievable transmission
rate in polarization-encoded quantum communication
channels. In Fig. 7, we detail the switching time and
show that the proposed system is capable of achiev-
ing an up to 125 KHz transmission rate. It should be
noted, however, that the slew-rate of the LTC6090-
5 is dependent on its gain. Throughout the simu-
lation runs, we enforced a 14V/V gain which limits
the transition time to 8kHz. By introducing a pre-
amplifier stage with 3V/V gain before the LTC6090-
Fast Polarization Switch for Polarization-based Quantum Communication
291

5, we could operate under a 5V/V gain achieving a
1MHz switching rate (Linear Technology, ).
Figure 7: Detailed transition time in the full ±70 voltage
swing at the electronic driver’s output.
5 CONCLUSION
An optoelectronic unit comprised of a mixed analog-
digital control loop and a polarization alignment state
is presented. The system’s application in polarization-
based quantum communication links is studied with
respect to the switching rate, usually above 1MHz.
Considering the device’s frequency response, we
show, through numerical simulations, that the de-
mands are matched. We also show that polariza-
tion visualization can be performed throughout the
switched operation of the system and a polariza-
tion visualization unit is proposed and experimentally
demonstrated. Fast and embeddable signal process-
ing tools that permit state of polarization control have
been described in the literature and are directly imple-
mentable in the proposed scheme.
ACKNOWLEDGMENT
The authors would like to thank brazilian agency
CNPq for financial support.
SUPPLEMENTAL MATERIAL
The authors provide digital supplemental material to
accompany the article: a video file depicting the sim-
ulation run of the polarimeter can be accessed in (Cal-
liari et al., ).
REFERENCES
Amaral, G. C., da Silva, T. F., Tempor
˜
ao, G., and von der
Weid, J. (2016). Few-photon heterodyne spec-
troscopy. Optics Letters, 41(7):1502–1505.
Calliari, F., Amaral, G. C., and von der Weid, J.-
P. (2014). Development of a graphics inter-
face for analysis of the state of polarization
of light through fpga platform. Monogra-
phy available at http://www.maxwell.vrac.puc-
rio.br/Busca etds.php?strSecao=resultado&nrSeq=
237902,.
Calliari, F., Lima, V., Garcia, J. a. P. D., and Ama-
ral, G. C. Fpga-based polarimeter simulation.
https://www.youtube.com/watch?v=s9F0D0HKb4E.
da Silva, T. F., Vitoreti, D., Xavier, G. B., Temporao, G. P.,
and von der Weid, J. P. (2012). Polarization-stable
long-distance interference of independent photons for
quantum communications. page QW2A.4.
EOSpace. Lithium niobate polarization controller.
http://www.hanamuraoptics.com/device/EOSPACE/
PC030123 EO.pdf. Accessed: 2016-01-22.
Ferreira da Silva, T., Vitoreti, D., Xavier, G. B., do Ama-
ral, G. C., Temporao, G. P., and von der Weid,
J. P. (2013). Proof-of-principle demonstration of
measurement-device-independent quantum key dis-
tribution using polarization qubits. Phys. Rev. A,
88:052303.
Garcia, J. D. and Amaral, G. C. (2016). An op-
timal polarization tracking algorithm for lithium-
niobate-based polarization controllers. arXiv preprint
arXiv:1603.06751, cs.SY.
Gisin, N., Ribordy, G., Tittel, W., and Zbinden, H. (2002).
Quantum cryptography. Rev. Mod. Phys., 74:145–195.
Heismann, F. (1989). Integrated-optic polarization trans-
former for reset-free endless polarization control.
Quantum Electronics, IEEE Journal of, 25(8):1898–
1906.
Heismann, F. (1994). Analysis of a reset-free polarization
controller for fast automatic polarization stabilization
in fiber-optic transmission systems. Lightwave Tech-
nology, Journal of, 12(4):690–699.
Imai, T., Nosu, K., and Yamaguchi, H. (1985). Optical po-
larisation control utilising an optical heterodyne de-
tection scheme. Electronics Letters, 21(2):52–53.
Karlsson, M. and Petersson, M. (2004). Quaternion ap-
proach to pmd and pdl phenomena in optical fiber sys-
tems. Lightwave Technology, Journal of, 22(4):1137–
1146.
Linear Technology. 140v cmos rail-to-rail
ouput, picoamp input current op amp.
http://cds.linear.com/docs/en/datasheet/6090fe.pdf.
Accessed: 2016-04-22.
Lo, H.-K., Curty, M., and Qi, B. (2012). Measurement-
device-independent quantum key distribution. Phys.
Rev. Lett., 108:130503.
L
¨
utkenhaus, N. (2000). Security against individual attacks
for realistic quantum key distribution. Phys. Rev. A,
61:052304.
PHOTOPTICS 2017 - 5th International Conference on Photonics, Optics and Laser Technology
292

Ma, X., Qi, B., Zhao, Y., and Lo, H.-K. (2005). Practical
decoy state for quantum key distribution. Phys. Rev.
A, 72:012326.
No
´
e, R., Heidrich, H., and Hoffmann, D. (1988). Au-
tomatic endless polarization control with integrated-
optical ti: Linbo 3 polarization transformers. Optics
letters, 13(6):527–529.
Saleh, B. E., Teich, M. C., and Saleh, B. E. (1991). Funda-
mentals of photonics, volume 22. Wiley New York.
Saleh, B. E. A. and Teich, M. C. (2007). Fundamentals of
Photonics. John Wiley & Sons, Inc.
Strang, G. (2009). Linear Algebra and Its Applications.
Wellesley-Cambridge Press, Wellesley, MA.
Xavier, G. B., de Faria, G. V., Temporao, G. P., and von der
Weid, J. P. (2008). Full polarization control for fiber
optical quantum communication systems using polar-
ization encoding. Opt. Express, 16:1867–1873.
Xi, L., Zhang, X., Tang, X., Weng, X., and Tian, F. (2010).
A novel method to calibrate linbo3-based polarization
controllers. Chinese Optics Letters, 8(8):804–806.
Fast Polarization Switch for Polarization-based Quantum Communication
293
