
Clock-Model-Assisted Agent’s Spatial Navigation
Joanna Isabelle Olszewska
School of Computing and Technology, University of Gloucestershire, The Park, Cheltenham, U.K.
Keywords:
Qualitative Spatial Relations, Clock Model, Knowledge Engineering, Human-robot Interaction, Robotics,
Intelligent Agents, Assistive Aid.
Abstract:
Intelligent agent’s navigation remotely controlled by means of natural language commands is of great help
for robots operating in rescue activities or assistive aid. Whereas full conversation between the human com-
mander and the agent could be limited in such situations, we propose thus to build human/robot dialogues
based directly on semantically meaningful instructions like the directional spatial relations, in particular rep-
resented by the clock model, to efficiently communicate orders to the agent in the way it successfully gets to
a target’s position. Experiments within real-world, simulated scenario have demonstrated the usefulness and
effectiveness of our developed approach.
1 INTRODUCTION
With the increasing number of robots involved in in-
spections, explorations, and interventions (Bischoff
and Guhl, 2010), the efficient communication be-
tween a human commander and his/her intelligent
agent is of prime importance, especially to help
agent’s navigation.
Using natural language for this purpose has been
proven to be a promising approach (Summers-Stay
et al., 2014). However, human/robot interaction in-
volving natural language is a very difficult process
(Tellex et al., 2011), (Baskar and Lindgren, 2014). In-
deed, such dialogue should be situated (Pappu et al.,
2013) , (Olszewska, 2016) and grounded (Olszewska
and McCluskey, 2011), (Olszewska, 2012), (Boularis
et al., 2015). The natural language commands should
be mapped to low-level instructions (Lauria et al.,
2002), (Choset, 2005) in order the agent moves physi-
cally in real-time within its environment, which could
be ground, air, or underwater, depending of the robot
type (Balch and Parker, 2002). Moreover, the intelli-
gent agent needs to have some knowledge to under-
stand the commander’s orders (Wooldridge and Jen-
nings, 1995), (Bateman and Farrar, 2004), (MacMa-
hon et al., 2006), (Lim et al., 2011), (Schlenoff et al.,
2012), (Bayat et al., 2016).
Hence, in this paper, we propose to study the use
of qualitative spatial relations in natural-language di-
alogues generated by the commander/agent team and
constrained by the communication channel availabil-
ity and occupancy.
(a) (b)
Figure 1: Directional Spatial Relations: (a) LRFB model;
(b) clock model.
Qualitative spatial relations are both semantic and
symbolic representations of the perceived space in or-
der to describe it and reason about it (Cohn and Renz,
2007). In particular, directional spatial relations for-
malize the relative positions between different objects
of a scene (Renz and Nebel, 2007).
There is a diversity of models codifying direc-
tional spatial relations. Common concepts include
‘left to’, ‘right to’, ‘front of’, ‘back of’ relations
(Bateman and Farrar, 2004), defining the LRFB
model (Fig. 1.(a)), and leading to primitive functions
such as ‘turn to the right’ or ‘move forward’ (Marge
and Rudnicky, 2010). Other models rely on the car-
dinal relations, i.e. the ‘North’, ‘South’, ‘West’, and
‘East’ concepts (Skiadopoulos et al., 2005). How-
ever, this approach requires intrinsically the knowl-
edge of some global reference point, e.g. the ‘North’
direction which is not always available in all scenar-
ios. Advanced models (Cohn and Renz, 2007), such
as the STAR model, define the directions through
Olszewska J.
Clock-Model-Assisted Agentâ
˘
A
´
Zs Spatial Navigation.
DOI: 10.5220/0006253706870692
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 687-692
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
687

Figure 2: Collaboration diagram of our process.
any number and orientation of intersecting lines, but
do not attach any semantically meaningful notion to
this kind of representation. A further model called
the Clock model (Olszewska, 2015) represents the
space as a clock face partitioned in the twelve regions,
each corresponding to an hour (Fig. 1.(b)). The di-
rectional spatial relations are thus conceptualized in
terms of the twelve hours, allowing natural language
commands such as ‘is at 2 o’clock of’.
In this work, we chose directional spatial models
as basis of human/robot dialogues aiming to guide the
agent within its environment to reach a target’s posi-
tion. In this context, we integrate in turns the LRFB
model and the clock model into the system generating
the dialogues between the two conversational agents,
to study the impact of each spatial model on the over-
all process, where the human operator remotely con-
trols the robot by natural-language commands.
The human agent’s orders are based on the reason-
ing about the objects’ spatial relations within images
acquired by the on-board camera of the artificial agent
as well as any additional agent’s view. However, the
human’s commands sent to the intelligent agent are
always formulated in the unique view which is iden-
tical for the human/robot team at all time. This tac-
tic automatically generates robot-centric spatial refer-
ences (Bugmann et al., 2004), directly appropriate for
the use by a system controlling the robot using infor-
mation from its on-board camera.
Hence, specifying that the agent giving the orders
is a human which has access to the same view of the
scene than the artificial agent implies the conversa-
tion is intrinsically situated (Bugmann et al., 2004),
and thus, there is no need to further coordinate the
robot/human perspectives, avoiding any distortion of
their natural expressions about the environment.
On the other hand, the agent’s navigation environ-
ment could be a schematic, virtual, or natural ground
(Marge and Rudnicky, 2010), such as illustrated in
Fig. 4(a), Fig. 4(b), and Fig. 4(c), respectively.
For this study, we focus on an unfamiliar, flat, non-
schematic, real-world type of ground.
The main contribution of this work is the pro-
posed communication system between a human being
(called commander) and a robot (or agent) by means
of natural language using the clock-modeled direc-
tional spatial relations in order to assist the intelligent
agent’s navigation to reach a target’s position.
The paper is structured as follows. In Section 2,
we explain the developed process to guide intelligent
agent’s navigation using the semantically meaningful
clock model to describe the directional spatial rela-
tions between this agent and its target’s position. This
system has been implemented and successfully tested
by carrying out simulations of real-world scenarios as
reported and discussed in Section 3. Conclusions are
drawn up in Section 4.
2 PROPOSED SYSTEM
In this section, we present our system architecture of
the humanly assisted, conversational agent’s naviga-
tion process. It loosely follows the software pipeline
structure of a robot consisting of the sensor inter-
face layer, perception layer, planning an control layer,
user interface layer, and vehicle interface layer (Rus-
sell and Norvig, 2011). Our new approach has seven
phases we designed using the Unified Modelling Lan-
guage (UML) (Booch et al., 2005). In particular, our
system’s UML collaboration diagram and the UML
class diagram are represented in Fig. 2 and Fig. 3,
respectively.
As notated in Fig. 2, the artificial agent sends at
first the front view of the scene acquired by its on-
board camera to the human commander, to establish a
situated dialogue between them and to allow reason-
ing about the scene to be assisted in the navigation.
Secondly, the human commander could use an op-
tional agent. Such additional agent is considered as
external to the scene, i.e. it is not present in the views,
but it senses the scene (Fig. 3). For example, a drone
could obtain additional views of the scene such as the
top view without appearing in it (Fig. 5). In case this
kind of additional agent is available in the scenario,
the commander triggers drone’s camera, and then, the
drone sends the acquired top view of the scene to the
commander.
During the next phase, knowledge about direc-
tional spatial relations is invoked (Fig. 3) by apply-
ing the LRFB or the clock model and reasoning based
on the available views of the scene to find the corre-
sponding directional spatial relation between the ob-
ject of reference (agent) and the relative object (tar-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
688

Figure 3: Class diagrams of our system.
get). Once the reasoning about the agent/target spa-
tial relation is performed, this spatial relation is inte-
grated in the natural-language command sent by the
commander to the agent (Fig. 2) to assist the agent in
reaching its goal.
In case of multiple artificial agents such as the
conversational agent and the drone, the different
views captured by each of them are merged simul-
taneously by the commander, before the reasoning
phase. However, the commander’s order resulting
from the reasoning process and sent to the robot is
expressed uniquely in the robot’s view to generated
an intrinsically situated dialogue.
After that, the agent processes the commander’s
order (Fig. 2) by extracting the provided directional
spatial relation from the dialogue line and by mapping
it into to low-level instructions ensuring robot motion,
i.e. grounding the spatial relation expressed using
one directional spatial model by transforming it into
the rotation angle around the robot’s top-bottom axis
and the incremental displacement within the ground
plane.
Finally, the robot moves incrementally and ac-
cordingly to the received commander order (Fig. 2).
In this system, we obviate the need to use the Si-
multaneous Localization and Mapping (SLAM) pro-
cess (Saeedi et al., 2015), or map graph building for
navigation (Toman and Olszewska, 2014), since the
perception/planning/reasoning tasks are performed by
the commander based on the environment projec-
tions obtained from the acquired view(s) of the sensed
scene and the extracted localization of the objects of
interest, i.e. the agent, the obstacle, and the target,
within it.
Figure 3 models the classes of our navigation
system which remotely assists the intelligent agent
(Agent) in avoiding any Obstacle and reaching the po-
sition (positionxT, positionyT ) of the Target by us-
ing natural language processing (NLP), in particular
integrating DirectionalSpatialRelations such as the
LRFBModel or the ClockModel. Such knowledge
is used to reason about the Scene perceived through
View such as the FrontView and the TopView cap-
tured by the Agent and the Drone, respectively. The
resulting directional spatial relation between Ob ject
like the Agent and the Target is directly sent by
the Commander to the Agent within an automati-
cally situated dialogue. Once this command is pro-
cessed, the Agent moves appropriately, updating its
(positionxA, positionyA) to the new one.
It is worth to note the target could be either
static or dynamic. In the latter case, it results in an
agent/target chase, where both the robot and the tar-
get are moving over time on the ground, assuming the
agent’s speed is equal or greater than the target’s one.
Hence, in this dynamic problem, the new positions
of the target and the robot are obtained thanks to the
view(s) acquired after each agent’s move. The corre-
sponding new directional spatial relations between the
agent and the target is then also recomputed after each
agent’s move. Thus, the process described in Fig. 2
is repeated iteratively, leading to a dynamic planning
updating the spatial dialogue to assist the agent’s nav-
igation towards its target.
Clock-Model-Assisted Agentâ
˘
A
´
Zs Spatial Navigation
689
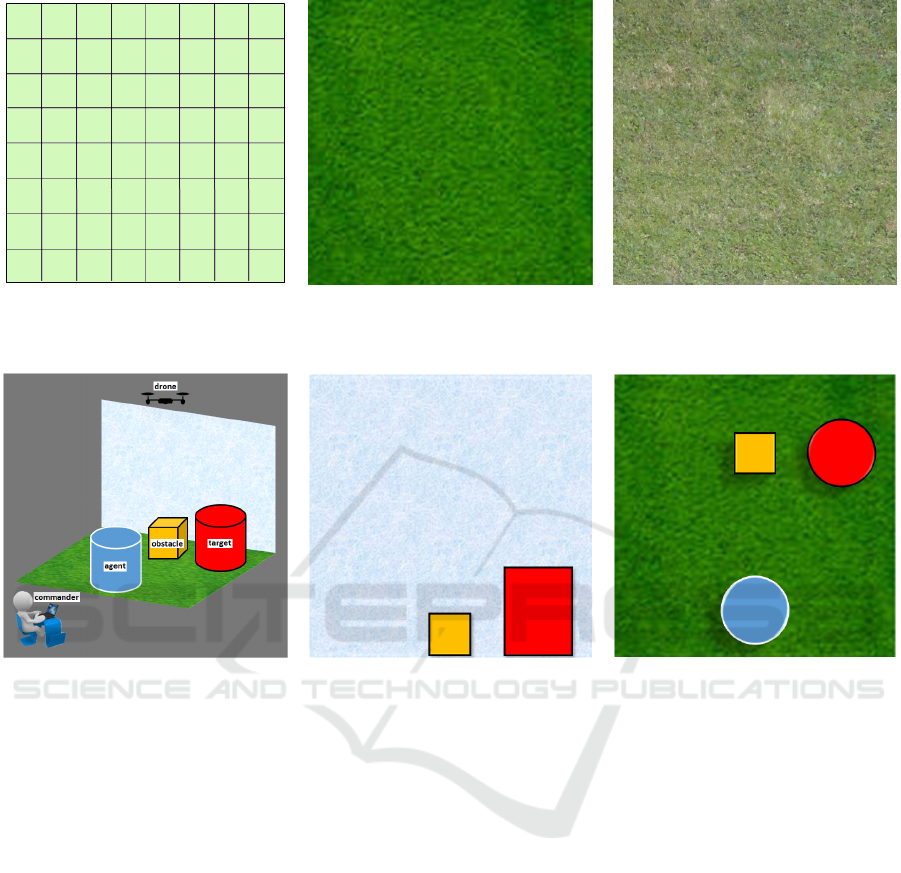
(a) (b) (c)
Figure 4: Different types of navigation grounds, e.g. (a) artificial ground, (b) virtual ground, (c) real-world ground. Best
viewed in colour.
(a) (b) (c)
Figure 5: Simulation of (a) the sensed scene:(b) the front view acquired by the agent; (c) the top view acquired by the drone.
3 EXPERIMENTS AND
DISCUSSION
To validate our presented approach, the designed sys-
tem (Figs. 2-3) has been implemented using C++
programming language, and applied to an intelligent
environment (Habib, 2011) benchmark, created by
changing the initial position of the agent as well as
the target’s and obstacle’s positions on a virtual, flat
ground such as illustrated in Fig. 4(b), within real-
world scenario.
Experiments have applied our system in simula-
tions of a real-world scenario consisting all in the
human commander’s remote assistance of a robot
(schematized as the blue cylinder with white contour
in Fig. 5) navigation through an intelligent environ-
ment to reach the position of a target (represented by
the red cylinder with black contour in Fig. 5), avoid-
ing any obstacle such as the yellow cube with black
contour in Fig. 5. In this scenario, the target and ob-
stacle are assumed to be static, only the robot is be-
having dynamically.
The first experiment does not involves any drone,
the reasoning being only based on the scene’s
front view captured by the robot’s on-board camera,
whereas the second experiment requires a drone, lead-
ing to multiple-view, spatial reasoning. Whereas the
commander has access to the additional view of the
scene, i.e. the top view sent by the drone, the human
agent expresses still all his/her orders to the intelligent
agent by referring directly to the common, identical
front view; the top view being only used as an addi-
tional information to strength the spatial reasoning.
Figure 5 shows a snapshot of the scene and its
different views at a given time. It is worth to note
that either the commander or the drone are not in the
scene itself (Fig. 5(a)), but they are both part of the
scenario. Indeed, on one hand, the drone acquires a
top view of the scene thanks to its embedded camera.
On the other hand, the commander looks remotely at
the scene through the agent’s camera capturing a front
view of the scene (Fig. 5(b)), and sees the top view of
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
690

the scene generated by the drone’s camera (Fig. 5(c)).
In these experiments, the designed system has
been tested once with applying the LRFB model and
once with integrating the clock model instead. The
results are reported in Table 1, while samples of the
human/robot dialogues are reported as follows.
An example of these dialogues generated when
using the LBFB model in our system is:
HUMAN: The target is right to you. Go!
ROBOT: I have moved.
HUMAN: The target is right to you. Go!
ROBOT: I have moved.
HUMAN: The target is in front of you. Go!
ROBOT: I have moved.
HUMAN: The target is in front of you. Go!
ROBOT: I have moved.
HUMAN: The target is in front of you. Go!
ROBOT: I have reached the target.
HUMAN: Good!
It is worth to note that the commander does not
start by sending an order using the front-of type rela-
tion, to avoid any collision of the agent with the ob-
stacle.
In case of the adoption of the clock model in our
system, a sample of the dialogue between the human
commander and the intelligent agent is:
HUMAN: The target is at 2 o’clock of you. Go!
ROBOT: I have moved.
HUMAN: The target is at 2 o’clock of you. Go!
ROBOT: I have moved.
HUMAN: Target is at 2 o’clock of you. Go!
ROBOT: I have reached the target.
HUMAN: Good!
Experiment 2 runs the system with using the sup-
plementary agent, namely, the drone. This leads to a
multi-robot system (Khamis et al., ), but the conversa-
tional agents remain the same than in the experiment
1, i.e. the commander and the robot; the commander
communicating with the drone using only machine in-
structions rather than natural-language dialogues.
Table 1: Navigation accuracy of the intelligent agent reach-
ing the target’s position, when the commander formulated
orders using the Left/Right/Forward/Backward (LRFB)
model and the clock model, respectively.
LRFB model clock model
exp1 88.5% 95.4%
exp2 90.6% 97.3%
In Table 1, the clock model is more efficient than
the LRFB model in both scenarios. On the other hand,
the use of multiple, synchronized views appears to
improve the accuracy of the commander’s orders and
thus, the agent’s navigation. In particular, the top
view decreases the uncertainty related to the quali-
tative spatial relations in any front view, resulting in
more precise rotation and displacement of the intelli-
gent agent.
The experiments have been carried out on simu-
lated grounds like in (Tellex et al., 2011). We can
observe that our system performance is far better than
the state-of-art ones (MacMahon et al., 2006), (Tellex
et al., 2011), and (Boularis et al., 2015).
From these experiments, we can observe that the
clock model refines the knowledge about the direc-
tional spatial relations useful for navigation guidance
by means of natural language, and leads to a more
accurate navigation system. Furthermore, the clock
model is 30% faster than the traditional models from
the computational point of the view. Thus, the clock
model can be widely used in human-agent situated di-
alogues, since it brings both a gain in precision and
speed in the resulting, assisted agent’s navigation.
4 CONCLUSIONS
In this work, we proposed a human-robot communi-
cation system using directional spatial relations, such
as the clock model, which are determined based on
the information extracted from the acquired views of
the visual scene where the robot evolves in. The cor-
responding directional spatial relation is then com-
municated by the commander to the intelligent agent
which transforms it by processing the natural lan-
guage command into motor commands and then
moves accordingly to reach the target’s position. Our
approach could be applied to human-robot interac-
tions (HRI) as well as to remote assistance of au-
tonomous systems’ navigation through real-world,
unfamiliar environment.
REFERENCES
Balch, T. and Parker, L. (2002). Robot Teams: From Diver-
sity to Polymorphism. Taylor & Francis.
Baskar, J. and Lindgren, H. (2014). Cognitive architecture
of an agent for human-agent dialogues. In Proceed-
ings of the International Conference on Practical Ap-
plications of Agents and Multi-Agent Systems, pages
89–100.
Bateman, J. and Farrar, S. (2004). Modelling models of
robot navigation using formal spatial ontology. In Pro-
ceedings of the International Conference on Spatial
Cognition, pages 366–389.
Clock-Model-Assisted Agentâ
˘
A
´
Zs Spatial Navigation
691

Bayat, B., Bermejo-Alonso, J., Carbonera, J., Facchinetti,
T., Fiorini, S. R., Goncalves, P., Jorge, V., Habib, M.,
Khamis, A., Melo., K., Nguyen, B., Olszewska, J. I.,
Paull, L., Prestes, E., Ragavan, S., S.Saeedi, Sanz, R.,
Seto, M., Spencer, B., Trentini, M., Vosughi, A., and
Li, H. (2016). Requirements for building an ontology
for autonomous robots. Industrial Robot: An Interna-
tional Journal, 43(5):469–480.
Bischoff, R. and Guhl, T. (2010). The strategic research
agenda for robotics. IEEE Robotics and Automation
Magazine, 17(1):15–16.
Booch, G., Rumbaugh, J., and Jacobson, I. (2005). The
Unified Modeling Language User Guide. Addison-
Wesley.
Boularis, A., Duvallet, F., Oh, J., and Stentz, A. (2015).
Grounding spatial relations for outdoor robot naviga-
tion. In Proceedings of the IEEE/RSJ International
Conference on Robot and Automation (ICRA’15),
pages 1976–1982.
Bugmann, G., Klein, E., Lauria, S., and Kyriacou, T.
(2004). Corpus-based robotics: A route instruction
example. In Proceedings of the International Confer-
ence on Intelligent Autonomous Systems, pages 96–
103.
Choset, H. (2005). Principles of Robot Motion: Theory,
Algorithms, and Implementation. MIT Press.
Cohn, A. G. and Renz, J. (2007). Handbook of Knowledge
Representation, chapter Qualitative spatial reasoning.
Elsevier.
Habib, M. (2011). Collaborative and distributed intelligent
environment merging virtual and physical realities. In
Proceedings of the IEEE International Conference on
Digital Ecosystems and Technologies, pages 340–344.
Khamis, A., Hussein, A., and Elmogy, A. Multi-robot task
allocation: A review of the state-of-the-art. Coopera-
tive Robots and Sensor Networks, pages 59–66.
Lauria, S., Bugmann, G., Kyriacou, T., Bos, J., and Klein,
E. (2002). Converting natural language route instruc-
tions into robot executable procedures. In Proceedings
of the IEEE International Workshop on Robot and Hu-
man Interactive Communication, pages 223–228.
Lim, G. H., Suh, I. H., and Suh, H. (2011). Ontology-
based unified robot knowledge for service robots in
indoor environments. IEEE Transactions on Systems,
Man, and Cybernetics-Part A: Systems and Humans,
41(3):492–509.
MacMahon, M., Stankiewicz, B., and Kuipers, B. (2006).
Walk the talk: Connecting language, knowledge, and
action in route intructions. In Proceedings of the
AAAI International Conference on Artificial Intelli-
gence, pages 1475–1482.
Marge, M. and Rudnicky, A. (2010). Comparing spoken
language route instructions for robots across environ-
ment representations. In Proceedings of the ACL An-
nual Meeting of the Special Interest Group on Dis-
course and Dialogue (SIGDIAL’10), pages 157–164.
Olszewska, J. I. (2012). Multi-target parametric active con-
tours to support ontological domain representation. In
Proceedings of RFIA Conference, pages 779–784.
Olszewska, J. I. (2015). 3D Spatial reasoning using the
clock model. Research and Development in Intelli-
gent Systems, Springer, 32:147–154.
Olszewska, J. I. (2016). Interest-point-based landmark
computation for agents’ spatial description coordina-
tion. In Proceedings of the International Conference
on Agents and Artificial Intelligence (ICAART’16),
pages 566–569.
Olszewska, J. I. and McCluskey, T. L. (2011). Ontology-
coupled active contours for dynamic video scene un-
derstanding. In Proceedings of the IEEE International
Conference on Intelligent Engineering Systems, pages
369–374.
Pappu, A., Sun, M., Sridharan, S., and Rudnicky, A. (2013).
Situated multiparty interaction between humans and
agents. In Proceedings of the International Confer-
ence on Human-Computer Interaction, pages 107–
116.
Renz, J. and Nebel, B. (2007). Handbook of Spatial Logics,
chapter Qualitative spatial reasoning using constraint
calculi. Springer Verlag.
Russell, S. and Norvig, P. (2011). Artificial Intelligence: A
Modern Approach. Prentice-Hall.
Saeedi, S., Paull, L., Trentini, M., and Li, H. (2015). Occu-
pancy grid map merging for multiple robot simultane-
ous localization and mapping. International Journal
of Robotics and Automation, 30(2):149–157.
Schlenoff, C., Prestes, E., Madhavan, R., Goncalves, P., Li,
H., Balakirsky, S., Kramer, T., and Miguelanez, E.
(2012). An IEEE standard ontology for robotics and
automation. In Proceedings of the IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS 2012), pages 1337–1342.
Skiadopoulos, S., Giannoukos, C., Sarkas, N., Vassilliadis,
P., Sellis, T., and Koubarakis, M. (2005). Comput-
ing and managing cardinal direction relations. IEEE
Transactions on Knowledge and Data Engineering,
17(12):1610–1623.
Summers-Stay, D., Cassidy, T., and Voss, C. R. (2014).
Joint navigation in commander/robot teams: Dia-
log and task performance when vision is bandwidth-
limited. In Proceedings of the ACL International Con-
ference on Computational Linguistics, pages 9–16.
Tellex, S., Kollar, T., Dickerson, S., Walter, M. R., Baner-
jee, A. G., Teller, S., and Roy, N. (2011). Understand-
ing natural language commands for robotic navigation
and mobile manipulation. In Proceedings of the AAAI
International Conference on Artificial Intelligence.
Toman, J. and Olszewska, J. I. (2014). Algorithm for graph
building based on Google Maps and Google Earth.
In Proceedings of the IEEE International Symposium
on Computational Intelligence and Informatics, pages
80–85.
Wooldridge, M. and Jennings, N. (1995). Intelligent agents:
Theory and practice. The Knowledge Engineering Re-
view, 10(2):115–152.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
692
