
Inspiration from VR Gaming Technology: Deep Immersion and
Realistic Interaction for Scientific Visualization
Till Bergmann
1
, Matthias Balzer
1
, Torsten Hopp
1
, Thomas van de Kamp
2
, Andreas Kopmann
1
,
Nicholas Tan Jerome
1
and Michael Zapf
1
1
Karlsruhe Institute of Technology (KIT), Institute for Data Processing and Electronics (IPE),
Karlsruhe, Germany
2
Karlsruhe Institute of Technology (KIT), Laboratory for Applications of Synchrotron Radiation (LAS),
Karlsruhe, Germany
Keywords: Virtual Reality, Interactive Interfaces, Scientific Visualization.
Abstract: The computer gaming industry is traditionally the moving power and spirit in the development of computer
visualization hardware and software. This year, affordable and high quality virtual reality headsets became
available and the science community is eager to get benefit from it. This paper describes first experiences in
adapting the new hardware for three different visualization use cases. In all three examples existing
visualization pipelines were extended by virtual reality technology. We describe our approach, based on the
HTC Vive VR headset, the open source software Blender and the Unreal Engine 4 game engine. The use
cases are from three different fields: large-scale particle physics research, X-ray-imaging for entomology
research and medical imaging with ultrasound computer tomography. Finally we discuss benefits and limits
of the current virtual reality technology and present an outlook to future developments.
1 INTRODUCTION
During the last two years there was a huge progress
in the development of virtual reality (VR) hardware,
mainly driven by the computer game industry. Now
there are several VR devices available with high
quality at moderate prices. High quality means:
high-resolution displays, precise head tracking and
lightweight hardware. Each property is required to
achieve a high level of immersion. Scientific
visualizations can benefit from this development in
several ways: produce a realistic impression of the
magnitude of objects and dimensions, free viewpoint
navigation and natural interaction. On the other
hand, the high immersion has the risk to produce
simulation sickness (see Section 3.1). Furthermore,
as the eyes of the users are covered by the VR
HMDs (head mounted display), it is not possible to
use conventional control devices like keyboard and
mouse. These limitations require alternative means
for navigation and interaction.
In this paper, we present the extension of three
visualization use cases by VR technology from the
fields of particle physics, biology and medical
imaging. We describe the used software and
hardware configurations. The workflow from
traditional to VR visualization is discussed as well
as the benefits of several aspects of the new
visualization devices with current technology.
2 VR SETUP
The typical VR development and showcase setup
consists of a VR headset, a graphics workstation and
manipulator devices. Currently there are basically
two high-end developer VR HMDs available on the
market, the Oculus Rift and the HTC Vive. The
PlayStation VR is only available for gaming
consoles. Google VR and its various clones have a
too low quality in display resolution and computing
power and are not considered here. However, it will
shortly be discussed in Section 4. In our setup, we
use the HTC Vive, as it is the only one providing
spatial-tracked hand controllers, which we regard as
essential for control and interaction in VR
330
Bergmann T., Balzer M., Hopp T., van de Kamp T., Kopmann A., Tan Jerome N. and Zapf M.
Inspiration from VR Gaming Technology: Deep Immersion and Realistic Interaction for Scientific Visualization.
DOI: 10.5220/0006262903300334
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 330-334
ISBN: 978-989-758-228-8
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

applications.
The basic HTC Vive system consists of the
HMD, two hand controllers and the lighthouse
stations. The display resolution is 1080 x 1200
pixels per eye at a frame rate of 90 Hz. The
lighthouse stations track an area of 5 m x 5 m from
two opposing corners to avoid occlusion of the
sensors. The hand controllers provide buttons, track
pad and trigger. After a short calibration step the
chaperone system, invented by HTC, will become
active to protect the user from collisions with the
surrounding: When approaching the border of the
tracked area, a fence-like structure will be faded into
the virtual scene to alert the user.
In contrast to HTCs recommendations to use a
NVIDIA GeForce GTX 970 or higher, we were able
to run the HTC Vive headset with a GTX 680 at
satisfying performance. The GTX 580 didn’t support
the HTC Vive.
Figure 1: The HTC Vive headset and one of the two hand
controllers. The controller provides a round track pad (left
side of controller), the grab trigger on the opposite side
and three buttons.
3 OBJECTIVES
In all our use cases we visualize 3D surface meshes
of different levels of abstraction. The traditional way
to display is rendering them on a 2D computer
display and to interact with keyboard and mouse. In
this way we loose stereoscopic viewing and natural
interaction. With 3D displays, we get a better spatial
perception, but hardly an impression of real
dimensions of objects, surroundings or locations,
simply because of the defined viewing angle, limited
by the size of the display or the projection.
From VR technology we expect to overcome
these drawbacks: the field of view is not limited, the
user can turn its head to arbitrary directions.
Manipulation of objects is transferred into the virtual
environment. Appropriate objects represent the
hands of the user, movements of the hands are
tracked by the hand controllers and displayed in the
virtual world. Thus a user can just grab virtual
objects, turn them and inspect them almost like in
the real world.
3.1 Deep Immersion and Navigation in
a Particle Physics Experiment
The goal of the KATRIN experiment is to measure
the mass of the neutrino particle (KATRIN, 2005). It
is a large-scale research facility, spread over several
buildings. Its beamline length is 70 m. There is a
large interest of the public in visiting and viewing
the experiment site. However, KATRIN has
temporary and permanent closed areas due to
hazards like high voltage, low temperature or
tritium, so a visit is not always possible. To
alternatively provide at least a virtual visit of the
experiment, a virtual visit of the whole KATRIN
setup had been constructed in a game-like
environment (Bergmann, 2014). The main objective
of the ‘game’ is to give the player a realistic
impression of the real size of the experiment.
Figure 2: A virtual visit on the KATRIN detector platform.
In the foreground the target gizmo (light blue circle)
pointing to the next teleport location.
Our first use case of applying VR technology is
the KATRIN game. The game and its geometry is
freely available under a CC license. The game has
been developed with the open source software
Blender (Blender, 2016) and originally runs under
the Blender game engine. Blender does currently
Inspiration from VR Gaming Technology: Deep Immersion and Realistic Interaction for Scientific Visualization
331

not support any VR hardware, so we decided to use
the Unreal Engine version 4 (UE4) game engine,
which is also freely available. Only for commercial
applications Epic Games Inc. charges a royalty
(Epic, 2016).
The conversion from Blender to UE4 is straight
forward using FBX as geometry format. However,
lights, sounds, animations, interactions and controls
need to be adapted manually for the UE4
environment. Mainly the collision system requires a
substantial effort and is still under construction.
Blender may use just the meshes itself for collision
detection. UE4 is highly optimized for game
performance and allows only simple and convex
collision geometries. Complex meshes need to be
subdivided and remodelled.
Controls and animations can easily be
implemented using the UE4 Blueprint visual
programming system. In the beginning we took over
the common WASD control scheme from single
player games: basically controlling the viewing
direction using the mouse and walking forward by
pressing the W key. However, in tests we found this
control scheme may result in simulation sickness. If
the visual impression of walking does not agree with
the proprioceptive impression, the brain will respond
with sickness. This experience was at that time
common to VR developers. Epic Games Inc.
collected some recommendations in its Virtual
Reality Best Practices (Epic, 2016) and recently
brought to public VR Templates for the Unreal
Engine. Instead of walking through the virtual
world, the player teleports through the world.
Teleporting is executed as follows: using the head or
hand motion the player points to a location,
visualized by a target gizmo or icon, and initiates the
teleportation by pressing a button on the controller.
Before the teleport the display fades to black and
fades back after. This way, the player does not see a
quick movement of the viewpoint and a sudden
change of the surrounding. We adapted this scheme
and got positive feedback from first users.
Figure 3: 3D view (left) and 3D explosion drawing (right)
of the weevil Trigonopterus vandekampi.
For the extension of the KATRIN game, our
main objective was to achieve a realistic immersion
and get an impression of the real size of the
experiment. Our investigations proof, that VR is able
to fulfil this requirement. Wearing the VR headset,
the player has a realistic feeling to be part of a
virtual world. The position and motion head tracking
is precise enough and the visual response so fast,
that there is no discrepancy to the real world.
3.2 VR Interaction with a 3D Model of
an Insect
Our second use case comes from entomology. X-ray
micro-tomography is a powerful technique to
resolve internal structures of opaque objects with a
spatial resolution in the micro meter scale. Again
analysing complex 3D structures is challenging with
standard displays. We use the geometry meshes of a
snout beetle (weevil, Trigonopterus vandekampi).
The main physiological properties have been
segmented (van de Kamp et al., 2014; Tan Jerome,
2017). In general, the 3D meshes are the means to
investigate the objects in detail and in this use case
we wanted to find new ways to facilitate successive
investigations.
We implemented a virtual lab, where we placed
two models of the weevil. Both can be grabbed
using the virtual hand and the controllers, the first as
one single object, the second consists of single
segmented objects, each of which can be grabbed
and moved around individually. To get a better
overview, the second specimen can be transformed
into a ‘3D explosion drawing’ of its individual
segments (see Figure 3). All 76 segments can be
picked up, moved and inspected from all sides.
Figure 4: The teleporter in the entomology virtual lab.
For navigation in the virtual world, the
navigation scheme of a new VR Template provided
with the UE4 is used. A new teleport location is
selected with the hand controller, and during this
process, a blue line or arc is displayed (see Figure
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
332
4). In this way, it is also possible to teleport behind
smaller obstacles. Further, the outline of the
chaperone mesh is displayed and can be turned using
the track pad on the controller. The trigger (see
Figure 1) is used to grab and hold objects.
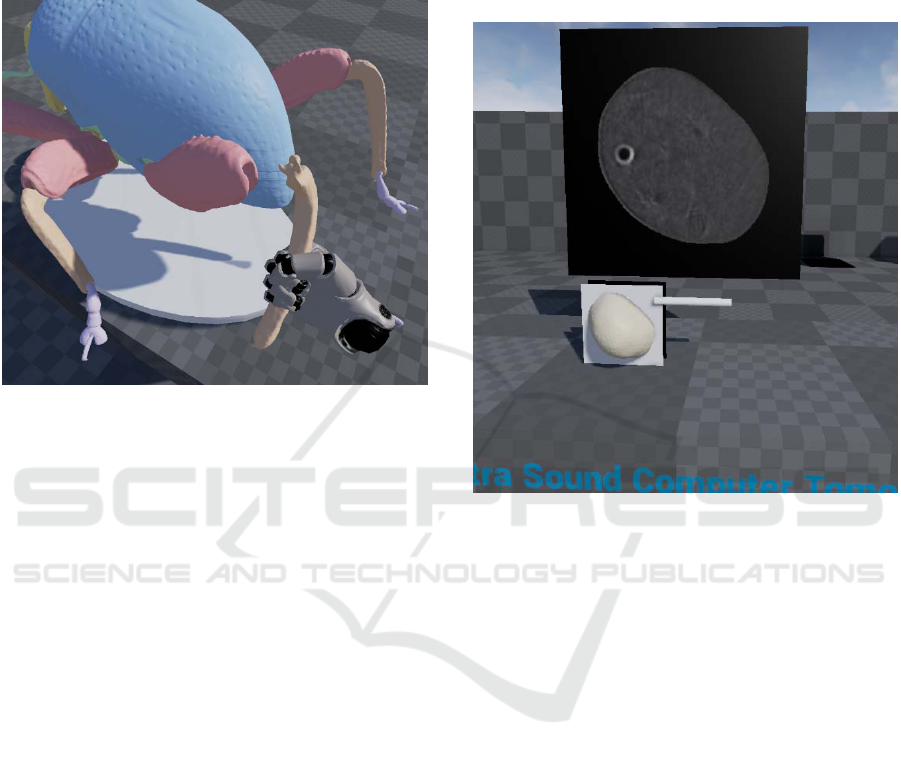
Figure 5: Grabbing and investigating the beetles leg in
detail. As visual feedback of the user hand position a robot
hand is displayed in the virtual world by the UE4 VR
blueprint template.
3.3 Combining 3D Imaging and
Projections for a Medical
Application
The objective of the project Ultrasound Computer
Tomography (USCT) is to establish a new imaging
methodology for early breast cancer detection
(Ruiter et al., 2012 and 2013). In this use case we
combine 3D meshes and the according image slices.
The images were taken from an artificial mamma
phantom containing hidden inner structures to
simulate tumour tissue of differing physical
properties. The images result from the reconstruction
process and the mesh is produced out of a
segmentation-processing step.
Our setup for this third use case has the objective
to give the spectator a spatial impression of the
object. Therefore, it is placed on a table and
‘mounted’ onto a frame. A second frame is movable
into one direction, like a slider, and can be moved
through the 3D model using the hand controller.
Depending on the position of the ‘slider’ the
according image slice is displayed on a large
polygon (see Figure 6). To browse through the
images, we use a UE4 FlipBook Blueprint to select
the according image with respect to the slider
position.
This application is currently under development.
Plans are to make the image slice movable and to
provide meta information belonging to the data set.
To investigate the inner part of the 3D mesh,
arbitrary cutting planes would be helpful.
Figure 6: A virtual USCT image viewer: segmented 3D
mesh in the foreground, the original image slice behind the
table in the background in poster size.
4 CONCLUSION AND OUTLOOK
Our question was: Do scientific applications benefit
from VR gaming technology? We used the HTC
Vive VR headset and controllers in three use cases,
which we implemented using the software Blender
and Unreal Engine 4 game engine.
VR provides some traps. It is essential to avoid
simulation sickness. On the other hand, there are so
many new possibilities. The amount of immersion is
simply impressing. If the goal is to show the user
realistic impressions of objects or locations, VR is
the method of choice.
VR can help in investigating 3D mesh models.
We developed and implemented some ideas like the
3D explosion drawing. The obvious next step is to
implement constraints to the joints of the single
segments – then we could investigate, how the
weevil moves.
For navigation and interaction in virtual reality
environments alternative techniques need to be
developed. Traditional control using keyboard and
Inspiration from VR Gaming Technology: Deep Immersion and Realistic Interaction for Scientific Visualization
333

mouse is not possible, as the VR headsets cover the
eyes of the users. One solution for navigation is the
teleport navigation, which additionally helps to
avoid simulation sickness. Tracked controllers
simplify the investigation of virtual objects like the
insect. In 2D applications, a spectator usually needs
to learn complicated combinations of mouse
movements and keyboard buttons to select, pan,
rotate and scale objects to be able to investigate it
from all possible viewing directions. With tracked
controllers, only the trigger is necessary to grab and
select an object, afterwards it can be turned and
moved around by moving the hand like in real life.
This kind of interaction ability may increase the
usability and user-friendliness of visualization
systems.
On the other hand, complex or ‘special’
interactions need new types of user interfaces. In our
use cases, we implemented a virtual button to
convert the 3D beetle mesh into a 3D explosion
drawing and a virtual slider to browse through the
tomography image stack. And the teleport indicator
acts like a virtual pointing device. Current VR
games and applications are using various additional
ways to implement virtual control elements like
virtual menus, buttons, laser pointers etc. In general,
virtual control elements are necessary to provide
additional interaction abilities and we expect to have
common ‘best practices’ in the near future. We
recommend mimicking real world interaction
schemes in the virtual reality environment to
simplify the learning process of the VR system
users.
An open issue is actor/player collision in VR
environments. The player can easily move its hands
or head into or through virtual obstacles like objects
and walls. In traditional 2D applications, the
rendering engine can just prevent such movements.
In VR applications, this could destroy the immersion
or even could result in simulation sickness.
Some visualization systems are designed to
support collaborative work of a team of e.g. domain
scientists. Using a single VR headset isolates the
active user from the remaining team. In our VR
application use cases the images inside of the VR
headset are mirrored on a separate monitor, so team
members are able to follow the user -passively- in
the virtual environment.
It is planned to extend the beetle VR use case to
a ‘virtual museum’ and present the virtual specimen
of other insects, too. In order to provide numerous
visitors the VR experience, it would be interesting to
have cheaper devices, maybe based on smartphone
headsets. As already mentioned, the Google VR
device family has too low image quality and no
controllers. However, recently Googles Daydream
View VR headset became available, providing high
quality displays and one tracked hand controller, and
we are planning to investigate its usability for our
use cases.
The VR headsets in conjunction with tracked
controllers are powerful new tools for visualization
of higher dimensional objects. In the near future, we
expect further developments of VR software, higher
resolution HMDs, more accurate tracking, more
natural 3D controllers and multi-user VR systems.
We are just at the beginning. But the current
technology is already sufficient for serious and
exciting scientific visualization.
REFERENCES
KATRIN Collaboration, 2005. KATRIN Design Report
2004. Forschungszentrum Karlsruhe, Bericht FZKA-
7090 (2005), ISSN 0947-8620: katrin.kit.edu.
Bergmann, T., Kopmann, A., Steidl, M., Wolf, J., 2014. A
Virtual Reality Visit In A Large Scale Research
Facility For Particle Physics Education And Public
Relation, INTED2014 Proceedings, Valencia, Spain,
2830-2838, 2014.
Blender, 2016. The Blender project – Free and Open 3D
Creation Software. www.blender.org.
Epic Games, Inc., 2016. The Unreal Engine 4 game
engine. www.epicgames.com,
www.unrealengine.com.
van de Kamp, T., dos Santos Rolo, T., Vagovic, P.,
Baumbach, T., Riedel, A. 2014, Three-Dimensional
Reconstructions Come to Life – Interactive 3D PDF
Animations in Functional Morphology. PLoS ONE
9(7): e102355. doi:10.1371/journal.pone.0102355.
Ruiter, N.V., Zapf, M., Hopp, T., Dapp, R., Gemmeke, H.,
2012. Phantom image results of an optimized full 3D
USCT, Proc. SPIE 8320, Medical Imaging 2012:
Ultrasonic Imaging, Tomography, and Therapy.
Ruiter, N.V., Zapf, M., Dapp, R., Hopp, T., Kaiser, W.A.,
Gemmeke, H., 2013. First results of a clinical study
with 3D ultrasound computer tomography, 2013 IEEE
International Ultrasonics Symposium (IUS), Prague,
2013, pp. 651-654.
Tan Jerome, N., Chilingaryan, S., Shkarin, A., Kopmann,
A., Zapf, M., Lizin, A., Bergmann, T., 2017. WAVE: A
3D Online Previewing Framework for Big Data
Archives. Accepted from 8
th
International Conference
on Information Visualization Theory and Applications
(IVAPP), Porto, Portugal, February 2017.
IVAPP 2017 - International Conference on Information Visualization Theory and Applications
334
