
A Lower Bound on the Number of Nodes with Multiple Slots in Wireless
Sensor Networks with Multiple Sinks
Sain Saginbekov
1
, Arshad Jhumka
2
and Yerzhan Mademikhanov
1
1
Department of Computer Science, School of Science and Technology, Nazarbayev University, Astana, 010000, Kazakhstan
2
Department of Computer Science, University of Warwick, Coventry CV4 7AL, U.K.
Keywords:
Wireless Sensor Networks, Multiple Sinks, Data Aggregation Scheduling, Lower Bound, Many-to-many
Communication, Routing.
Abstract:
Wireless Sensor Networks (WSNs) once deployed, are left unattended for extended periods of time. During
this time, the network can experience a range of faulty scenarios. If a sink node fails, data gathered by sensor
nodes may not be delivered to a destination. One way to increase the reliability of such WSNs is to deploy with
more than one sink. In this paper, we formalise the problem of many-to-many data aggregation scheduling in
WSNs with multiple sinks and establish a lower bound on the number of nodes with multiple slots.
1 INTRODUCTION
Typically, WSNs, once deployed, are left unattended
for extended periods of time. During this time, the
network can experience a range of faulty scenarios:
(i) any sensor node may fail due to energy exhaus-
tion, (ii) links may fail due to interference or (iii) the
sink may fail to communicate due to some reasons
such as link failures, node and sink failures. For ex-
ample, in (Paritosh et al., ), the authors observe that 4
of the 7 correctly working nodes had communication
failure with the sink over time, furthermore, they ob-
serve sink outage due to power failure. In a deploy-
ment (Polastre et al., 2004), a crash of the database
running on the sink node resulted in the complete
loss of data for two weeks. Likewise, in a deploy-
ment (Tolle et al., 2005), two weeks of data were lost
due to a sink outage. In (Szewczyk et al., 2004), au-
thors observed a sink outage due to harsh weather. In
such situations, as mentioned, the loss of the single
sink results in the loss of the network.
One way to increase the reliability of such WSNs
is to deploy with more than one sink. Moreover, de-
ploying more than one sink may improve network
throughput and prolong network lifetime by balanc-
ing energy consumption, and may address fault tol-
erance issues (Lee et al., 2005; Valero et al., 2012;
Sitanayah et al., 2012).
A number data aggregation scheduling (DAS) al-
gorithms have been proposed for WSNs with a sin-
gle sink. There also exist DAS algorithms for WSNs
with multiple sinks. For example, DAS algorithms
for a WSN with multiple sinks have been presented
in (Kawano and Miyazaki, 2008; Bo and Li, 2011).
However, those works present DAS algorithms where
many nodes send data to only one sink, whereas
this paper considers the problem of data aggregation
scheduling where many nodes send to many sinks.
In (Saginbekov et al., 2016), the authors focused
on the same problem. However, their proposed algo-
rithm performs data aggregation from many nodes to
two sinks. Their algorithm also works for more than
two sinks, but in sub-optimal ways. The main idea
of that algorithm was to develop a backbone that con-
nects two sinks and then schedule nodes transmission.
The same idea, i.e., building a backbone can
be used in WSNs with multiple sinks, which is di-
rectly related to the problem of developing a Steiner
tree (Gilbert and Pollak, 1968). We are interested in
developing a minimum Steiner tree, which is known
to be NP-complete (Karp, 1972), as it reduces the
number of nodes with multiple slots.
In this context, we make the following novel con-
tributions:
• We formalise the problem of DAS scheduling in a
WSN with multiple sink.
• We prove a lower bound for solving a variant of
DAS called weak DAS.
The rest of the paper is organized as follows. In
Section 2, we present an overview of related work.
202
Saginbekov S., Jhumka A. and Mademikhanov Y.
A Lower Bound on the Number of Nodes with Multiple Slots in Wireless Sensor Networks with Multiple Sinks.
DOI: 10.5220/0006263502020206
In Proceedings of the 6th International Conference on Sensor Networks (SENSORNETS 2017), pages 202-206
ISBN: 421065/17
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

In Section 3, we formalise the problem of Data Ag-
gregation Scheduling (DAS) in a WSN with multiple
sinks. Then, in Section 4, we show a lower bound for
solving a variant of DAS called weak DAS. Finally,
in Section 5, we discuss future work and conclude the
paper.
2 RELATED WORK
Communication protocols that have been developed
for WSNs with multiple sinks can be found in (Mot-
tola and Picco, 2011; Kawano and Miyazaki, 2008;
Bo and Li, 2011; Thulasiraman et al., 2007; Tuy-
suz Erman and Havinga, 2010; Hui Zhou and Xu,
2012). A data collection protocol that tries to decrease
the number of redundant transmissions has been pro-
posed in (Mottola and Picco, 2011). This protocol
uses information about the neighbourhood nodes to
reduce transmissions while collecting data from many
nodes to many sinks.
In (Thulasiraman et al., 2007), the authors propose
an algorithm that builds two node-disjoint paths from
every node to two different sinks. If one path fails, the
other is used to route the data. In (Tuysuz Erman and
Havinga, 2010), the authors propose a routing pro-
tocol with hexagon-based architecture. Nodes in the
network are grouped into hexagons according to their
locations. A routing protocol proposed in (Hui Zhou
and Xu, 2012), is based on trees. In this protocol, dif-
ferent trees rooted at different sinks are used to for-
ward data.
The schemes that have been proposed in (Kawano
and Miyazaki, 2008; Bo and Li, 2011) have more rel-
evance to our work. In (Kawano and Miyazaki, 2008),
the authors propose two algorithms: an algorithm that
builds shortest path trees rooted at each root and a
scheduling algorithm that exploits a graph colouring
algorithm to allow nodes to forward their messages to
their closest sink without message collisions. The au-
thors of (Bo and Li, 2011), propose two data aggre-
gation scheduling algorithms for multiple-sink sen-
sor networks. The first algorithm is Voronoi-based
scheduling where the sensing area is divided into re-
gions forming k forests, one forest for each sink. Then
the algorithm assigns slots to nodes. The second al-
gorithm is Independent scheduling which differs from
the first one in forest construction. However, in both
of these algorithms different portions of sensor nodes
send their data to a single different sink, i.e., many-
to-one communication, whereas we consider the case
where many nodes send their data to many sinks.
3 PROBLEM FORMULATION
We present the following definitions that we will use
in this paper.
Definition 1 (Schedule) A schedule S : V → 2
N
is a
function that maps a node to a set of time slots.
Definition 2 (DAS-label) Given a network G =
(V, E), a sink ∆, a schedule S and a path γ = n ·
m.. . ∆, we say that n is DAS-labeled under S on γ
for ∆ if ∃t ∈ S (n) · ∃t
0
∈ S (m) : t
0
> t.
We call the node m on γ the ∆-parent of n and γ
the DAS-path for n.
Definition 3 (Strong and Weak schedule) Given a
network G = (V, E), a sink ∆ ∈ V and a schedule S,
S is said to be a strong DAS schedule for ∆ for a node
n ∈ V iff ∀ path γ
i
= n · m
i
. .. ∆, n is DAS-labeled un-
der S on γ
i
for ∆. S is a weak DAS schedule for ∆ for
n if ∃ path γ = n · m
i
. .. ∆ such that n is DAS-labeled
under S on γ for ∆.
A schedule S is strong DAS (resp. weak DAS) for
G iff ∀n ∈ V , S is strong DAS schedule (resp. weak
DAS schedule) for ∆ for n.
A strong schedule, which is impossible to de-
velop (Jhumka, 2010), in essence, is resilient to prob-
lems that occur in the network such as radio links not
working or node crashes during deployment. On the
other hand, a weak schedule is not resilient and, any
problem happening, will entail that a message from
node n to m will be lost.
Given a network with n sinks ∆
1
, ∆
2
,··· , ∆
n
we
wish to develop a weak schedule for all sinks. There
are different ways to achieve this. In general, to de-
velop a weak schedule, several works have adopted
the approach whereby a tree is first constructed,
rooted at the sink, and then slots assigned along the
branches to satisfy the data aggregation constraints.
A trivial solution is to construct n trees, each rooted
at a sink, and then to assign slots to nodes along the
trees. This means that nodes can have n slots, i.e.,
meaning that nodes may have to do n transmissions
for the same message. Thus, to reduce the number of
transmissions, we want to reduce the number of slots
for nodes to transmit in.
3.1 DAS Scheduling
We model our problem as follows:
We capture slots assignment with a set of decision
variables.
t
S
n
=
1 t ∈ S(n)
0 otherwise
A set value assignment to these variables represent
a possible schedule. The number of slots used, which
A Lower Bound on the Number of Nodes with Multiple Slots in Wireless Sensor Networks with Multiple Sinks
203

equates to the number of transmission by nodes, has
to be reduced for extending the lifetime of the net-
work.
We capture the number of nodes with multiple
slots as follows:
f
S
n
=
1 |S(n)| > 1
0 otherwise
However, such a schedule may not assign a slot to
a given node, so we need to rule out some schedules
with a constraint:
∀n ∈ V · ∃t : t
S
n
= 1
The above constraint means that all nodes in the
network will be assigned at least one slot. We also
rule out schedules S that assign the same slot to two
nodes that are in the two-hop neighbourhood, i.e,
∀m, n ∈ V : t
S
m
= 1 ∧t
S
n
= 1 ⇒ ¬2HopN(m, n)
Nodes can get information about slots assigned to
nodes of two-hop neighbourhod by exchanging mes-
sages. Finally, we require to generate weak DAS
schedules S, i.e.,
∀i ∈ N, ∀m ∈ V · ∃n ∈ V, (m · n . . . ∆
i
) : t
S
m
= 1 ⇒ ∃τ >
t : τ
S
n
= 1
Thus, there are different ways to generate a collision-
free weak DAS schedule for all sinks. For instance,
one may want to minimise numSlots to reduce the
number of slots during which nodes transmit. An-
other way is to reduce the number of times any node
can transmit, in some sort of load balancing. Thus,
our goal is to solve the following problem, which we
call the EECF-N-DAS problem (for energy-efficient
collision-free N-sinks DAS):
EECF-N-DAS problem: Obtain an S such that
minimise
∑
∀t
∑
∀n∈V
f
S
n
subject to
1. ∀n ∈ V · ∃t : t
S
n
6= 0
2. ∀i ∈ N, ∀m ∈ V · ∃n ∈ V, (m · n . . . ∆
i
) : t
S
m
=
1 ⇒ ∃τ > t : τ
S
n
= 1
3. ∀m, n ∈ V : t
S
m
= 1 ∧ t
S
n
= 1 ⇒
¬2HopN(m, n)
The EECF-N-DAS problem consists of two subprob-
lems: (i) The first two conditions amount to what
we call the weak DAS problem and (ii) the fourth
condition ensures that any weak DAS schedule is
collision-free. Collision freedom is guaranteed by
ensuring that no two nodes in a 2-hop neighbourhood
share the same slot.
4 THEORETICAL
CONTRIBUTIONS
In (Saginbekov et al., 2016), authors proved that it is
impossible to have a weak schedule in a network with
more than one sink where all nodes have only one slot.
Therefore, there should be a certain number of nodes
that require at least two slots.
In this section, we investigate how small can the
number of nodes with multiple slots be to generate
an energy efficient collision-free weak schedule in a
network with multiple sinks.
4.1 All Nodes Have Multiple Slots
(
∑
∀n∈V
f
S
n
= |V |)
A trivial solution to this is as follows: generate k trees,
each rooted at a different sink, where k is the number
of sinks. For sink ∆
1
, starting with slot |V |, assign,
in decreasing order, slots to nodes using Breadth-first
search algorithm (BFS) (Cormen et al., 2001). The
same process is repeated with other trees rooted at
∆
i≤k
, except they start with slot i ∗ |V |. This sets
an upper bound for collision-free weak schedules for
WSNs.
4.2 Towards Minimizing the Number of
Nodes with Multiple Slots (
∑
∀n∈V
f
S
n
)
One way of building a network that solves the weak
DAS problem is to assign two slots to the nodes on a
tree that connects all ∆
1≤i≤k
, and assign one slot to all
other nodes like shown in Figure 1(a).
The scheme works as follows: Initially, the
scheme builds a backbone tree that connects all sinks.
Then one node on the backbone tree is selected as a
super virtual root (shaded node in Figure 1(a)). Then,
the scheme starts to build trees rooted at each node,
called a virtual root, on the backbone tree (filled cir-
cles in Figure 1(a)). There exist many tree-building
algorithms. For example, BFS algorithm can be used
to build such trees. After building trees rooted at the
virtual roots, nodes that are not on the backbone tree
(circles in Figure 1(a)) forward their data to their vir-
tual root. On the way towards a virtual root, each
node aggregates received data from its children. After
receiving aggregated data, each virtual root forwards
data to the super virtual root. The super virtual root,
in turn, aggregates received data and sends the final
aggregated data to the sinks using the backbone tree.
In other words, only virtual roots forward the data to-
wards the sinks. Thus, in this scheme, only the nodes
that are on the backbone tree send twice, except the
super node. The super node sends only once.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
204
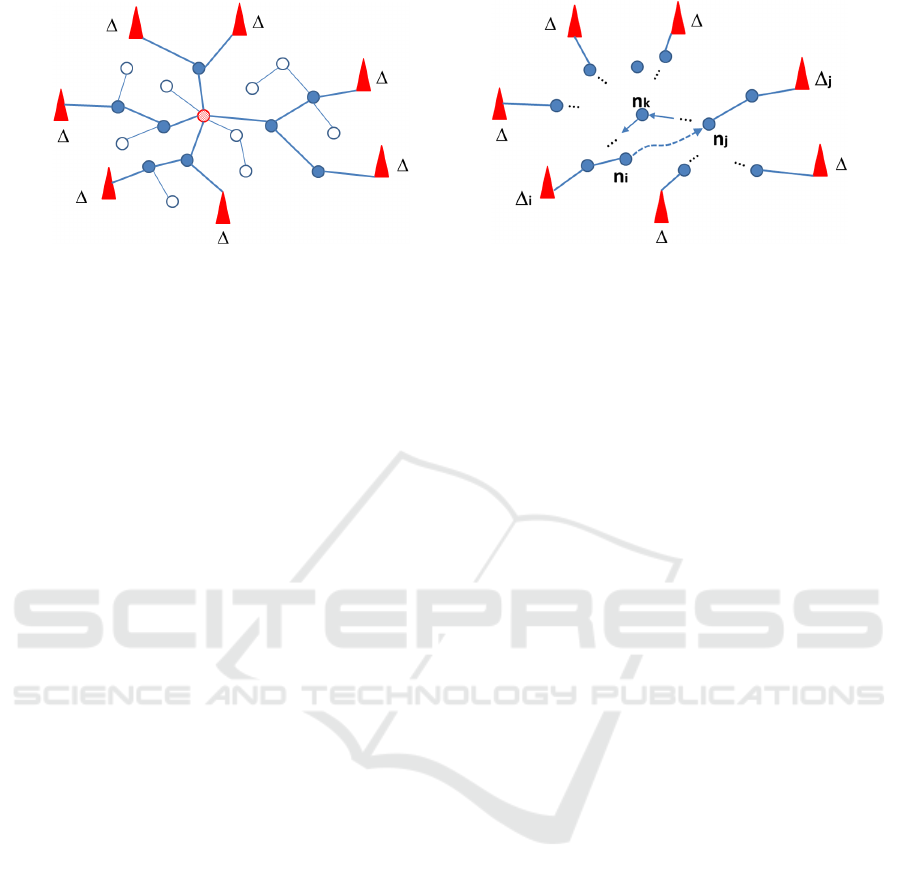
(a) (b)
Figure 1: (a) An example of network that solves weak DAS. Tree (bold lines) shows the backbone in which the nodes (virtual
roots) have at least two slots. (b) An illustration of the proof of Theorem 1.
Now, the question is does the scheme above mini-
mize the number of nodes that send the same message
more than once? In other words, does the scheme
reduce the number of nodes with multiple slots? In
the scheme above, the number of nodes with multiple
sinks is equal to the number of nodes on the backbone
tree minus one (the number of virtual roots except the
super root ). Can we reduce it further? The answer is
no, if the backbone tree is Steiner minimal tree.
Corollary 1 Given a network G = (V, A) with k sinks
∆
1
, ∆
2
, . . ., ∆
k
, where k ≥ 2, and a Steiner minimal
tree, with m nodes, that connects all k sinks, then there
exists a weak DAS S for G,
∑
∀n∈V
f
S
n
= m − 1.
Since we know that it is possible to obtain a weak
DAS schedule S that assigns two or more slots to at
most m − 1 nodes, the objective is to determine the
minimum number of such nodes with at least two
slots. This is captured in the following result (The-
orem 1):
Theorem 1 Given a finite network G = (V, A) with k
sinks ∆
1
, ∆
2
, . . ., ∆
k
, where k ≥ 2, and a Steiner min-
imal tree T , with m nodes, that connects all k sinks.
Then, there exists no weak DAS schedule S for G such
that
∑
∀n∈V
f
S
n
≤ m − 2.
From Corollary 1, we know that it is possible to
have a weak DAS schedule with at most m − 1 nodes
that assigned more than two slots. Now, we prove that
it is impossible to have such a schedule with less than
m − 1 nodes.
Proof.
We assume that there exists a weak DAS S for finite
network G such that
∑
∀n∈V
f
S
n
≤ m − 2 under S, and
show a contradiction.
Let T ⊂ G be a Steiner minimal tree which spans
all sinks in G ∆
1
, ∆
2
, . . ., ∆
k
. Since there are only m −
2 nodes in G that have more than one slot, there exist
at least two nodes in T that have only one slot, say n
i
and n
j
with, without loss of generality, S(n
i
) < S(n
j
).
Note that, as T is a tree, a path P
i j
between n
i
and n
j
connects at least two sinks, say ∆
i
and ∆
j
. Assume
that n
i
is closer to ∆
i
than to ∆
j
(See Figure 1(b) for
illustration).
Now, as n
j
should send its packet to ∆
i
and cannot
use P
i j
to deliver its packet to ∆
i
(as S(n
i
) < S(n
j
)),
there should exist a node n
k
(See Figure 1(b)), other
than n
i
, such that S(n
j
) < S(n
k
). If n
k
is assigned
more than one time slot, then we are done, as the num-
ber of nodes with more than one slot becomes m − 1.
Otherwise, as n
j
has only one slot and S(n
j
) < S(n
k
),
there should exist another node n
r
such that S(n
k
) <
S(n
r
) to deliver the packet of n
k
to ∆
j
. If n
r
is assigned
more than one time slot, then we are done. It contin-
ues like this until there exists a node with at least two
time slots. However, if there is no such a node, then
as G is finite, it is impossible to have a weak DAS
schedule for G that has m − 2 nodes with at least two
time slots.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we formalised the problem of data ag-
gregation scheduling in WSNs with multiple sinks.
We then established a lower bound on the number of
nodes with multiple slots. We proved that the num-
ber of nodes that send one message more than once
cannot be less than the number of nodes in minimal
Steiner tree that connects all sinks. As a future work
we plan to develop an approximation algorithm that
solves the DAS problem in WSNs with multiple sinks,
and conduct simulation and testbed experiments to
evaluate its performance.
A Lower Bound on the Number of Nodes with Multiple Slots in Wireless Sensor Networks with Multiple Sinks
205

REFERENCES
Bo, Y. and Li, J. (2011). Minimum-time aggregation
scheduling in multi-sink sensor networks. In SECON,
pages 422–430. IEEE.
Cormen, T. H., Stein, C., Rivest, R. L., and Leiserson, C. E.
(2001). Introduction to Algorithms. McGraw-Hill
Higher Education, 2nd edition.
Gilbert, E. N. and Pollak, H. O. (1968). Steiner minimal
tree. SIAM Journal on Applied Mathematics, 16:1–
29.
Hui Zhou, Dongliang Qing, X. Z. H. Y. and Xu, C. (2012).
A multiple-dimensional tree routing protocol for mul-
tisink wireless sensor networks based on ant colony
optimization. 2012.
Jhumka, A. (2010). Crash-tolerant collision-free data ag-
gregation scheduling for wireless sensor networks. In
SRDS 2010, pages 44–53.
Karp, R. M. (1972). Reducibility among combinatorial
problems. In Proceedings of a symposium on the Com-
plexity of Computer Computations, pages 85–103.
Kawano, R. and Miyazaki, T. (2008). Distributed data ag-
gregation in multi-sink sensor networks using a graph
coloring algorithm. AINA, pages 934–940.
Lee, H., Klappenecker, A., Lee, K., and Lin, L. (2005).
Energy efficient data management for wireless sensor
networks with data sink failure. IEEE MASS, 0:210.
Mottola, L. and Picco, G. P. (2011). Muster: Adaptive
energy-aware multisink routing in wireless sensor net-
works. IEEE Trans. Mob. Comput., 10(12):1694–
1709.
Paritosh, P., Kirk, M., Alistair, R., Ong, H., and Hart,
J. Glacial environment monitoring using sensor net-
works. In Real-World Wireless Sensor Networks,
Stockholm, Sweden, 20 - 21 Jun 2005.
Polastre, J., Szewczyk, R., Mainwaring, A., Culler, D., and
Anderson, J. (2004). Wireless sensor networks. chap-
ter Analysis of Wireless Sensor Networks for Habitat
Monitoring, pages 399–423. Kluwer Academic Pub-
lishers, Norwell, MA, USA.
Saginbekov, S., Jhumka, A., and Shakenov, C. (2016). To-
wards energy-efficient collision-free data aggregation
scheduling in wireless sensor networks with multiple
sinks. In SENSORNETS 2016 - Proceedings of the
5th International Confererence on Sensor Networks,
pages 77–86.
Sitanayah, L., Brown, K. N., and Sreenan, C. J. (2012).
Multiple sink and relay placement in wireless sen-
sor networks. In WAITS 2012 (Workshop on AI in
Telecommunications and Sensor Networks).
Szewczyk, R., Polastre, J., Mainwaring, A. M., and Culler,
D. E. (2004). Lessons from a sensor network expedi-
tion. In EWSN, pages 307–322.
Thulasiraman, P., Ramasubramanian, S., and Krunz, M.
(2007). Disjoint multipath routing to two distinct
drains in a multi-drain sensor network. In INFOCOM,
pages 643–651. IEEE.
Tolle, G., Polastre, J., Szewczyk, R., Culler, D., Turner, N.,
Tu, K., Burgess, S., Dawson, T., Buonadonna, P., Gay,
D., and Hong, W. (2005). A macroscope in the red-
woods. In Proceedings of the 3rd international confer-
ence on Embedded networked sensor systems, SenSys
’05, pages 51–63, New York, NY, USA. ACM.
Tuysuz Erman, A. and Havinga, P. (2010). Data dissem-
ination of emergency messages in mobile multi-sink
wireless sensor networks. In Med-Hoc-Net 2010,
pages 1–8.
Valero, M., Xu, M., Mancuso, N., Song, W.-Z., and Beyah,
R. A. (2012). Edr
2
: A sink failure resilient approach
for wsns. In ICC 2012. IEEE.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
206
