
Automated Dynamic Formation of Component Ensembles
Taking Advantage of Component Cooperation Locality
Filip Krijt, Zbynek Jiracek, Tomas Bures, Petr Hnetynka and Frantisek Plasil
Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic
Keywords: Distributed Coordination, Architectural Adaptation, Ensemble-based Component System, Autonomic
Systems.
Abstract: Smart cyber-physical systems (sCPS) is a growing research field focused on scenarios where a set of
autonomous software-hardware entities (components) is cooperating via network communication to achieve
a type of swarm or cloud intelligence. Typically the components’ cooperation is designed at a low level of
abstraction and their behavior validated via simulations. As a remedy, a declarative language capable of
specifying high-level component ensembles has been proposed in recent work. By capturing component
functionality and the cooperation constraints, a specification serves both for generating platform-specific
implementation and as a model@run.time to support self-adaption via dynamic formation of ensembles.
However, for a particular specification, multiple possible architectural configurations exist with various
impact on the system. Given their typically large number, we select the best one via an SMT solver. In this
paper, we show that scalability of such approach can be supported by exploiting the effect of locality in
component cooperation and by hoisting specific domain knowledge to the level of architecture.
1 INTRODUCTION
Recent proliferation of cheap yet powerful hardware
components on the market and focus on initiatives
such as IoT have led to an increased interest in
Smart Cyber-physical Systems (sCPS). Typically
distributed (and often decentralized), these systems
consist of autonomous hardware/software entities
(components) that are extended with a network
connection to achieve a form of collective
intelligence based on opportunistic cooperation,
enabling them to better fulfil the desired goal(s). An
efficient description of this cooperation proves to be
a challenge due to the variability and sheer number
of situations the system should respond to. This
results in the need for novel software engineering
concepts and practices.
In this paper, we focus mainly on architecting
self-organizing sCPS, building on the paradigm of
autonomic component ensembles (Wirsing et al.
2011) introduced within the ASCENS project (EU
FP7 FET – http://ascens-ist.eu/). These dynamically
formed component cooperation groups support many
of the desired sCPS properties, e.g., dynamicity of
system architecture and autonomous component
operation. In particular, we utilize the intelligent
ensemble (often referred to as ensemble for short
further on) concept (Bures et al. 2015), which
provides rich structural constraints and optimization
constructs.
By taking advantage of the associated domain-
specific language for ensemble specification, we
apply a model-driven approach, employing the
ensemble specification model both at compile-time
for generating platform-specific implementation, and
as a model@run.time (Morin et al. 2009) description
of the required architecture. To enable general
resolution of the architecture based on this
specification model, as well as deal with the large
number of possible architectural configurations, the
problem is viewed as a SAT problem. An SMT
solver is periodically used to select the best dynamic
architecture configuration according to the
specification model and the current context, i.e., the
state of the system and its environment. The
resulting configuration itself is also a
model@runtime, representing the actual architecture
of the system. However, finding the best
configuration is naturally challenging in terms of
scalability. The goal of this paper is therefore to
show how the specification model can be extended
with additional concepts that take advantage of
Krijt F., Jiracek Z., Bures T., Hnetynka P. and Plasil F.
Automated Dynamic Formation of Component Ensembles - Taking Advantage of Component Cooperation Locality.
DOI: 10.5220/0006273705610568
In Proceedings of the 5th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2017), pages 561-568
ISBN: 978-989-758-210-3
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
561
application-specific domain knowledge to improve
scalability.
The structure of the paper is as follows. Sect. 2
introduces a running example, and shows how to
model it using the ensemble concepts. In Sect. 3 we
discuss the scalability limitation of the approach and
a conceptual way to address it. Sect. 4 describes the
language concepts we have introduced to address
scalability. Sect. 5 presents a discussion together
with a short overview of related work. Finally,
Sect. 6 concludes the paper.
2 APPLYING ENSEMBLES
2.1 Running Example
To illustrate the ensemble concepts we use a
simplified example that can nevertheless be used to
demonstrate many of the properties of ensembles.
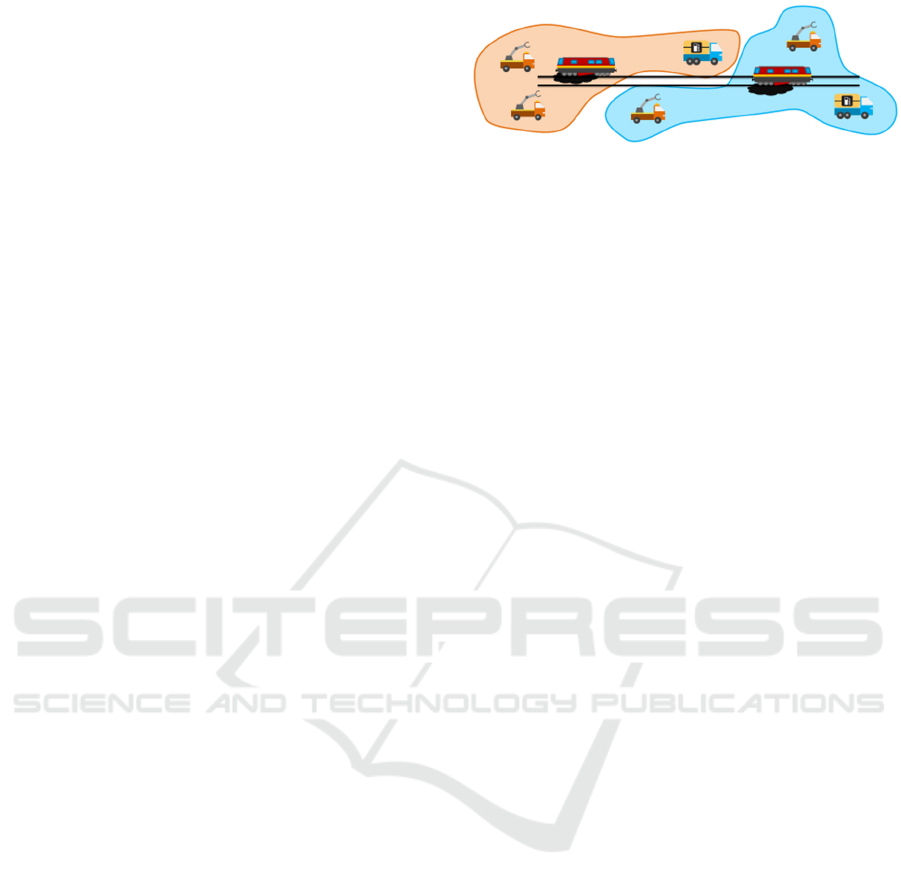
We model a railroad emergency response service in
which trains move along a one-dimensional space
representing parallel railroad tracks, with each train
having a dedicated track. The trains’ fuel tank is not
of very high quality and occasionally breaks and
leaks fuel. In such an event, a group consisting of
several (e.g., 2 to 3) emergency repair vehicles and a
refueling truck must be dispatched to the train to
resume its operation. These vehicles travel on roads
running parallel to the tracks. We assume dense
placement of railroad crossings, and that the trains
are equipped with reliable sensors and brakes,
ensuring that there is no risk of collision with
vehicles crossing the tracks.
The goal of the system as a whole is to minimize
the amount of time the trains are not operable.
Assuming the time needed for an actual repair and
refueling is negligible, the main performance goal is
to get repairers and refueling trucks to the damaged
trains fast. As all repairers and trucks are equivalent
in terms of speed, this translates to selecting trucks
that are near the inoperable train to repair it.
However, care must be taken not to get too greedy,
as simply assigning the closest vehicles could easily
result in another train being left without repairs for a
long time. For the sake of simplicity, we assume that
there are enough vehicles to assist all trains
simultaneously – thus every train will eventually be
repaired. The described problem can be seen as
forming emergency groups that are “good”
according to some global metric, such as how far the
involved emergency vehicles must travel in total. An
example of such “good” assignment is in Figure 1.
Figure 1: Example of two well-chosen emergency groups.
2.2 Ensembles and Components
Thanks to their ability to describe temporary
collaboration groups that are dynamically formed
and dissolved based on system’s state and outer
context, ensembles are very suitable for modelling
problems like the one outlined above. Modelling
with ensembles recognizes two main first-class
concepts: components and ensembles.
Individual entities in the system are modelled as
components, entities encapsulating state in the form
of component knowledge, and behavior, represented
by periodically executed or event-triggered
processes. The components are designed to be
independent, and thus not allowed to directly
communicate with each other. Instead, the
cooperation aspect is realized via ensembles, groups
of components that are dynamically formed based on
a declarative membership specification provided by
the architect. Ensembles facilitate cooperation by
means of a knowledge exchange, allowing the
developer to specify data transfer. An important
point is that the ensembles are not created directly,
but are instead formed by the ensemble runtime
framework based on the provided
model/specification. Both the formation and the
knowledge exchange occur periodically, allowing
for dynamic system architecture. No overlap of
components is permitted between the ensembles.
In the case of our scenario, the actors in the
system, i.e., trains, repairers, and refueling trucks
can be seen as components, with knowledge related
mostly to their geographical position and processes
handling sensing and actuating (movement), while
ensembles can be used to model the emergency
groups created to assist the damaged trains.
2.3 Modelling with Ensembles
In Figure 2, we show a particular description of our
example system using the declarative Ensemble
Definition Language (EDL) (Bures et al. 2015),
allowing us to directly state our requirements on
both shape and optimality, with the runtime
framework taking care of forming the appropriate
architecture. Because the understanding of the
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
562

ensemble concepts is critical for the main
contribution of this paper, we use this EDL
description to show the semantics. As the EDL draft
shown in (Bures et al. 2015) has since been backed
by an implementation, and the language refined,
there are subtle differences between the form
presented here and the original syntax.
To be able to specify an ensemble type, we first
define the types it depends on – in our case, the
ensembles deal with trains, repairers and refueling
trucks. On lines 1, 6 and 11, we use the data
contract construct, which is essentially an interface
over knowledge, to declare the required fields (such
as position) for each type of entity in the system.
Each component can satisfy multiple data contracts.
Next, we specify the ensemble type used for
cooperation when repairing the trains, starting on
line 17. To identify the ensemble, we declare id to
be a component of the type Train – essentially
saying that instances of this ensemble type cannot be
created without being associated with a unique Train
instance, which can be seen as a sort of coordinator
of the instance. Apart from being useful for
restricting the domain of all possible ensemble
instances, the id serves an additional purpose of
representing ensemble knowledge, a shared
knowledge store for the ensemble – with the train
component being the sole writer, thus avoiding any
problems with synchronization.
The main section of the ensemble specification is the
ensemble membership starting on line 19 and
consisting of three sections. First, we define the
shape of the ensemble by declaring the ensemble
roles that the components can participate in – in this
case, we say that all ensembles of this type contain 2
to 3 Repairer components (repairers role, line 21)
and exactly one Truck component (refueler role,
line 22). Each role declares its required data
contract, and the set of roles a component can
participate in is limited to those whose data contract
it satisfies. In order for the ensemble instance to
exist, the cardinalities and the required data contract
of each role must be satisfied, essentially serving as
a structural constraint on the shape of the ensemble.
Next, we place semantic constraints, represented
by the constraint expression – an arbitrary logical
expression based on boolean and integer knowledge
fields (due to the limitations of the underlying
solver) of ensemble members. In our scenario the
only constraint is shown on line 24, saying that the
train in question must have its needs. Help flag set to
true, i.e., the ensemble instance is not formed unless
the corresponding train breaks down and publishes
its desire to get repaired.
Figure 2: EDL Specification of the example.
The third part of the membership definition is
the fitness function, specified with a numeric
expression. The fitness function is not a constraint,
but instead provides the optimizing aspect of the
ensemble membership. If the ensemble formation
framework must decide between forming two
variants of a single instance, the one with higher
fitness value will be chosen. More precisely,
ensemble instances will be created in such a way as
to maximize the sum of their fitness values –
essentially performing global optimization. The
fitness should therefore be carefully chosen by the
system architect to capture the intuitive system
utility (i.e., how good the system is at fulfilling its
goals) or performance of the system as close as
possible. In our example, the fitness function can be
seen on line 25 and is calculated as a sum of inverse
of distance from the train for all rescuers in the
ensemble. Finally, knowledge exchange is specified,
creating a data flow between the members and
completing the specification. The EDL supports
simple inline assignments among the ensemble
members, or deferring to an external implementation
in platform-specific language, e.g., Java.
1 data contract Train
2 position : int // position along the x axis
(railroad kilometers)
3 needsHelp : bool
4 end
5
6 data contract Repairer
7 position : int
8 target : int
9 end
10
11 data contract Truck
12 position : int
13 target : int
14 fuel : int
15 end
16
17 ensemble RepairTeam
18 id train : Train
19 membership
20 roles
21 repairers [2..3] : Repairer
22 refueler : Truck
23 constra ints
24 constraint train.needsHelp
25 fitness sum repairers 1 / ((it.position -
train.position) * (it.position -
train.position)) + 1
26 knowledge exchange
27 refueler.target = train.id
28 repairers.target = train.id
Automated Dynamic Formation of Component Ensembles - Taking Advantage of Component Cooperation Locality
563
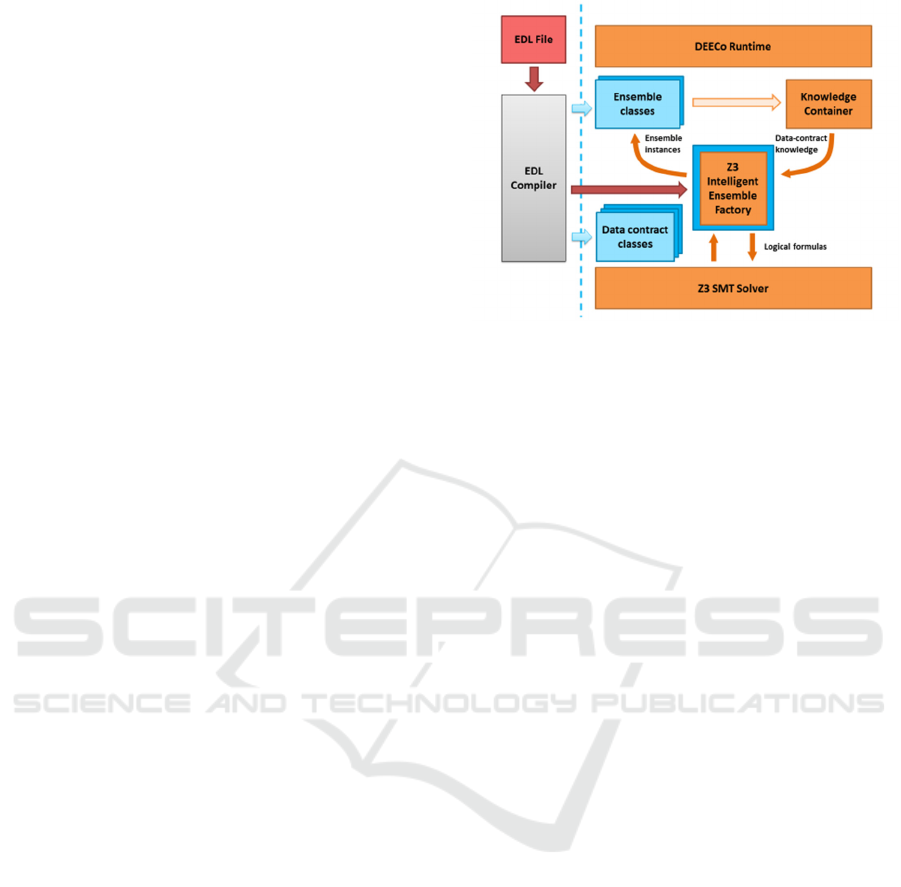
2.4 Ensembles MDE Workflow
The declarative EDL description is one half of the
ensembles support, the other half being the runtime
framework providing the ensemble formation
capabilities. As of now, the intelligent ensemble
concepts are supported by a framework
implementation utilizing the Eclipse Modelling
Framework (EMF), XText, the Java implementation
of the DEECo component model (Bures et al. 2013),
and the Microsoft Z3 SMT solver.
Figure
3 captures
the overall architecture and workflow of the
framework. While being integrated with the DEECo
Java implementation, the ensemble formation
framework can support any environment capable of
providing the general knowledge container, which
provides access to knowledge in the form of data
contracts, capturing the system context.
The process starts with the EDL file, described
by an Ecore metamodel and compiled via the EMF
pipeline. The document object model (DOM)
representing a particular EDL file is a high-level
model of the system specification and is used to
generate the required classes, namely those
representing the data contracts and ensemble
instances, as well as a thin wrapper of the ensemble
formation mechanism. The ensemble formation
mechanism itself is the most complicated and
important part of the framework, and is encapsulated
in an ensemble factory. In the current
implementation, the factory is realized by a mapping
to the Z3 solver. This mapping combines the current
knowledge data gained from the knowledge
container and the ensemble specification and
generates a problem description in the form of
logical formulas for the Z3. An important point here
is that the ensemble specification is provided in the
form of the EDL DOM, so the model is used both
for compile-time code generation and runtime
specification representation – essentially being used
in the spirit of the models@run.time approach
(Morin et al. 2009), lending itself well to modelling
adaptive systems. After the Z3 is run, the factory
creates ensemble instances indicated by the results
of the SMT solver. These instances – together
another model@run.time representing the desired
system architecture – are then used to drive
ensemble formation and the knowledge exchange,
influencing the data in the knowledge container and
completing the loop.
Figure 3: Framework architecture, with specification in
red, generated code in blue and platform classes in orange.
3 ADDRESSING SCALABILITY
3.1 Scalability Problems
It can be seen that the system description both
addresses the example scenario and is complete in
terms of supporting all possible system
configurations (i.e., assignments of supporting
vehicles to damaged trains). Modelling the system in
this way has many advantages – it (i) lessens the
mental overhead of the system architect, (ii) makes it
easier to reason about the properties of the system
being built, and (iii) provides a clean separation of
concerns by moving the heavy-weight
implementation of the cooperation and group
formation logic from components to the framework.
However, this neat high-level declarative
prescription also presents problems. The chief of
these is the lack of scalability. Due to its level of
abstraction, the runtime framework cannot take
advantage of any problem-specific heuristic (e.g.,
assigning the closest repairers), as this cannot be
inferred from the description. Instead, the
framework must consider all possible configurations
and pick the best one based on the valuation of the
fitness function. As the number of possible
configurations is exponential with respect to the
number of components in the system, this approach
clearly cannot scale.
3.2 Enabling Performance
Optimizations
Instead of trying to directly improve the
performance of the framework and the underlying
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
564

solver – which would not address the exponential
nature of the problem itself – we can turn the
problem around and find a way to inject the missing
domain knowledge into the general assignment
mechanism, allowing it to transform the problem to
a variant of the problem that is easier to solve (i.e.,
digestible for the solver in terms of size and
complexity) without compromising the utility of the
system too much. In order to do that safely and
decide what form the domain knowledge should
take, we make some important assumptions about
the class of sCPS systems we want to support.
Assumption 1: Typically, many of the possible
configurations satisfying ensemble’s membership
constraints are undesirable due to low fitness and
consequently leading to subpar utility of the system.
In terms of our example, such configurations are
easily seen, as they are going against our intuitive
understanding of the fitness function – for example a
configuration assigning the furthest repairers and
truck to a train. While the percentage of these
undesirable configurations highly depends on the
problem and the threshold, it can be generally
expected to grow with the scale of the system – for
example, the larger the area our railroad service
covers, the more repairers it has, and the more
possibilities for assigning repairers that are beyond a
reasonable operating radius there are. In fact, with
scale, the undesirable configurations can also
become more damaging to the system utility – it
would take the furthest repairers much longer to
reach the train.
Assumption 2: A well-designed system is
influenced by ensemble formation only in terms of
system utility, not safety. As sCPS are inherently
distributed and only able to communicate with other
parts of the system via unreliable channels, such as
MANETs and other wireless networks, safety
guarantees cannot be built on top of communication.
Instead, the components must offer core safety
guarantees by design, so that a component is still
capable of secure operation even when cut off from
other parts of the system. As the ensembles are
essentially a communication abstraction, they cannot
be used to guarantee safety. In our example, this can
be seen in the design of the trains – regardless of any
network problems, the train is equipped with trusted
sensors and brakes to avoid any catastrophic
scenario. If no ensembles are ever formed, a
damaged train will hamper the system indefinitely,
but will not endanger any lives.
Disregarding Configurations. Based on the
assumptions outlined above, a useful conclusion can
be reached: It is possible to completely disregard the
undesirable configurations when deciding what
ensembles to form. While these configurations are
valid per se, they represent a situation when the
system is not performing well, and should never be
needed under normal circumstances; meaning that
situations when selecting such a configuration would
be the right thing to do are also highly improbable.
The only moment these configurations should be
realized is when there are no other options for the
system to utilize – and at such a time, the difference
between forming badly performing ensembles and
forming no ensembles at all becomes negligible. As
ensemble formation only impacts utility and not
safety, dropping these configurations influences the
system utility minimally, and safety not at all.
4 PROPOSED SOLUTION
4.1 Importance of Locality
Before we can drop undesirable configurations to
make the ensemble formation more scalable, we
must define what form this additional domain
knowledge should take, and introduce a suitable
concept to the EDL. In essence, we need a way to
allow the architect to exactly specify when a
configuration is to be deemed undesirable, and
eliminate these before handing the problem
description over to the solver.
In Sect. 3.2, we have intuitively rated the
configuration based on domain-specific properties of
individual components, e.g., saying that picking
repairers that are too far from the damaged train
does not make sense. More generally, this can be
interpreted as a distance metric expressed in terms of
the local knowledge of an individual component and
domain data of the ensemble instance in question,
and there is a correlation between the distance
metric and the impact on instance fitness (and by
extension overall system utility) if this component
would join. Assuming the existence of such a metric
is fairly realistic – many sCPS applications tend to
be very large and deployed on physical entities. It is
therefore necessary to partition the system into
manageable parts, often by taking advantage of the
physical locality of the components both in design
and execution. This is especially seen when dealing
with geographical position, but can also take form of
network distance or a similar property.
Once we have a metric with suitable properties,
we can assume that we can separate suitable and
unsuitable components with a preference function
based on their computed distance valuation. To
enable the configuration filtering, we must allow the
developer to specify this preference in the EDL.
Automated Dynamic Formation of Component Ensembles - Taking Advantage of Component Cooperation Locality
565

4.2 EDL Filtering Concepts
Figure 4 shows the modified EDL ensemble type
code, which we use to introduce the two concepts
that enable the identification of the undesirable
configurations. The code is similar to the original,
except for the where and limit clauses added to the
role specification in the ensemble type.
The purpose of the where clause (line 33) is to
limit the component selection for a particular role
only to the components satisfying the corresponding
condition – unless the where clause is used, all
components of the declared role type (i.e., satisfying
its data contract) are considered suitable. The where
clause can therefore be seen as a threshold-based
filter. Syntactically, it is a logical expression with a
single restriction – it can only refer to the ensemble
knowledge, represented by the defined id name, and
the knowledge of the component being considered,
represented by the it keyword. This is in sharp
contrast with the general constraint clause, which
can refer to any role and knowledge, thus requiring
the ensemble structure to be fully decided before its
evaluation. This restriction allows us to evaluate the
condition for each candidate component separately
and potentially discard it before the problem is
presented to the solver, making the problem smaller.
While the where clause and the hard true/false
threshold it defines are suitable for many problems,
sometimes it is more natural to define the filtering
based on some suitability order, e.g., one defined by
the distance metric. We have therefore also proposed
the limit clause, which limits the selection to a
specified number of best components, ordered by a
given expression. It should be noted that unlike
where, limit is not implemented in the current
version of the runtime, but can be easily supported.
The usage of the limit clause can be seen on the line
34. The end effect of the limit clause is similar to the
where clause, but instead of dropping the
undesirable configurations entirely, the runtime will
Figure 4: Specification enhanced with filtering concepts.
consider them only when no better options are
available. Its effect is also more predictable, as it
will always select at most the specified number of
components, whereas the where clause can in some
situations select no components (e.g., every
component is further than the threshold), or all of
them (e.g., all components are clustered nearby).
The details of the concepts’ implementation are
rather technical and out of scope of this paper. In
short, before the ensemble factory transforms the
ensemble specification into formulas, it creates a set
of possible components for each role in an ensemble.
Initially, this set consists of components with the
matching data contract. The filtering concepts are
evaluated after this type matching phase and further
restrict the set before passing it on to the Z3 solver –
the solver itself is therefore unaware of the filtering
and deals directly with a reduced problem.
Unlike other intelligent ensemble concepts, the
where and limit clauses cannot be seen as enhancing
the expressivity of the ensembles; instead, they are a
way to inject the missing pieces of domain
knowledge into ensemble specification and enable
the solver to perform domain-specific optimizations
without losing its generality. Being application-
specific, the exact values used for the filtering must
be decided by the architect based on his experience,
simulation runs, or logging of the actual application.
5 DISCUSSION AND RELATED
WORK
Discussion: The degree to which the filtering
concepts are effective highly depends on the used
filtering expression. Ideally, the expression should
be chosen in such a way that the components that
would result in the highest fitness valuation of an
ensemble will always be preferred. This requires the
existence of a distance metric as described in
Sect. 4.1. Alternatively, we may utilize a weaker
form of a distance metric that only approximates the
fitness function. In this case, we may cut off some
configurations that would result in high fitness, with
the possible loss of utility depending on the density
of such “good” configurations among those that are
discarded. If no suitable metric can be found, the
usefulness of the filtering is severely limited.
Additionally, if several possible ensemble
instances had similar sets of filtered suitable
components, the solver would be much more
constrained than intended, possibly resulting in a
markedly reduced system fitness. In the worst case,
some instances that would otherwise form with
29 ensemble RepairTeam
30 id train : Train
31 membership
32 roles
33 repairers [2..3] : Repairer where
Abs(it.position - train.position) < 100
34 refueler : Truck limit 10 orderby
Abs(it.position - train.position)
35 constra ints
36 constraint train.needsHelp
37 fitness sum repairers 1 / ((it.position -
train.position) * (it.position -
train.position)) + 1
38 knowledge exchange
39 refueler.target = train.id
40 repairers.target = train.id
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
566

reasonable fitness would not exist due to their most
suitable components being needed elsewhere. This
would also happen without filtering, but in that case,
the instance may have other candidate components
to use instead. This effect will be less pronounced in
systems with strong locality and clear partitioning.
Finally, it is worth noting that there are situations
when not all possible ensembles can be formed (e.g.,
if there are not enough repair vehicles for all trains,
or due to filtering), and that a specific ensemble
instance (e.g., for a very distant train) is repeatedly
ignored in favor of other ensembles with higher
fitness. This lack of progress may be undesirable,
and while it can be addressed by using a variable
representing priority of the instance as part of fitness
functions and filtering, a part of future work can be
to consider a more systematic way to deal with it.
The two assumptions from Sect. 3.2 limit where
the filtering concepts can be used, but not
unreasonably. Most sCPS are naturally manifested in
the physical world (e.g., smart cities, smart mobility,
wearables) and thus exhibit both the low density of
reasonable configurations (due to geographical
position) and the need for communication-
independent safety (especially if they interact with
humans). Of course, if the system requires
cooperation of all components or is based on reliable
communication, the assumptions will not hold.
However, such system is typically of centralized
nature and will not need the benefits of ensembles.
Related work: Several frameworks based on the
concept of ensembles have already been realized and
the paradigm has been successfully applied to sCPS
case studies, such as (Hoch et al. 2015). One of these
ensemble-based frameworks is Helena (Hennicker &
Klarl 2014). It offers the same core concepts, i.e.,
components with roles and ensembles, however it
focuses primarily on communication between
components and does not explicitly capture the
architecture of an application. Also, it does not
provide means for optimizing during ensemble
formation. The same is also true for JRESP
(http://jresp.sourceforge.net), another ensemble-
based framework. Ab
a
CuS (Alrahman et al. 2016b) –
a Java-based implementation of AbC (Alrahman et
al. 2016a) – is not directly an ensemble-based
framework but it shares several key concepts
(components with roles and opportunistic
communication among them described via a set of
rules and conditions). As the frameworks above, it
also does not allow explicitly capturing architecture
and expressing optimizations for establishing
communication links.
Conceptually very close to ensemble-based
systems are multi-agent systems (MAS) with
communication among agents via coalition
formation. There are many approaches for coalition
formation and optimizations, e.g., (Michalak et al.
2010; Rahwan et al. 2012; Sandholm et al. 1999),
however they assume fully connected networks and
thus are not suitable for sCPS (which typically have
to operate in a loosely coupled environment).
6 CONCLUSION
In this paper we have presented the ensemble
concepts and their model-driven support in the
intelligent ensembles framework, and highlighted
the scalability problem. To address it, we have
introduced new concepts to the EDL language that
allow the system architect to provide optimization
hints to the framework. We have also described our
assumptions and the reasoning behind the concepts,
particularly the importance of utilizing locality.
Even though the approach shows promise, it still
requires a further evaluation. In particular, it is
necessary to verify that the assumptions from
Sect. 3.2 are indeed as common to sCPS scenarios as
expected, and to measure how the use of the filtering
concepts impacts the properties of the system.
In terms of future work, it may be worth
investigating whether the domain knowledge can be
injected into the solver in a more elegant or more
powerful form than the one presented here – or
possibly even inferred from the DSL via language
analysis. A systematic way to enforce progress,
mentioned in Sect. 5, remains to be explored as well.
On the whole however, we believe that this
approach is promising and allows for easier design
and implementation of common sCPS scenarios.
AKNOWLEDGEMENTS
This work was partially supported by Charles
University Grant Agency project No. 390615, and
partially supported by Charles University
institutional funding SVV-2016-260331.
REFERENCES
Alrahman, Y.A., Nicola, R.D. & Loreti, M., 2016a. On the
Power of Attribute-Based Communication. In
Proceedings of FORTE 2016, Heraklion, Crete,
Automated Dynamic Formation of Component Ensembles - Taking Advantage of Component Cooperation Locality
567

Greece. LNCS. Springer, pp. 1–18.
Alrahman, Y.A., Nicola, R.D. & Loreti, M., 2016b.
Programming of CAS Systems by Relying on
Attribute-Based Communication. In Proceedings of
ISOLA 2016, Corfu, Greece. LNCS. Springer, pp.
539–553.
Bures, T. et al., 2013. DEECo: An ensemble-based
component system. In Proceedings of CBSE 2013,
Vancouver, Canada. ACM, pp. 81–90.
Bures, T. et al., 2015. Towards Intelligent Ensembles. In
Proceedings of ECSAW 2015, Dubrovnik/Cavcat,
Croatia. ACM, pp. 1–4.
Hennicker, R. & Klarl, A., 2014. Foundations for
Ensemble Modeling – The Helena Approach. In S.
Iida, J. Meseguer, & K. Ogata, eds. Specification,
Algebra, and Software. LNCS. Springer, pp. 359–381.
Hoch, N. et al., 2015. The E-mobility Case Study. In M.
Wirsing et al., eds. Software Engineering for
Collective Autonomic Systems. LNCS. Springer, pp.
513–533.
Michalak, T. et al., 2010. A Distributed Algorithm for
Anytime Coalition Structure Generation. In
Proceedings of AAMAS 2010, Toronto, Canada. pp.
1007–1014.
Morin, B. et al., 2009. Models@ Run.time to Support
Dynamic Adaptation. Computer, 42(10), pp.44–51.
Rahwan, T. et al., 2012. Anytime coalition structure
generation in multi-agent systems with positive or
negative externalities. Artificial Intelligence, 186,
pp.95–122.
Sandholm, T. et al., 1999. Coalition structure generation
with worst case guarantees. Artificial Intelligence,
111(1–2), pp.209–238.
Wirsing, M. et al., 2011. ASCENS: Engineering
Autonomic Service-Component Ensembles. In B.
Beckert et al., eds. Proceedings of FMCO 2011
(Revised Selected Papers), Turin, Italy. LNCS.
Springer, pp. 1–24.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
568
