
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
Florian Jomrich
1,2
, Aakash Sharma
2
, Tobias R
¨
uckelt
1,2
, Daniel Burgstahler
2
and Doreen B
¨
ohnstedt
2
1
Adam Opel AG, Bahnhofsplatz, 65423, R
¨
usselsheim, Hessen, Germany
2
KOM Multimedia Communications Lab, Technical University of Darmstadt, Rundeturmstr. 10, 64283,
Darmstadt, Hessen, Germany
Keywords:
Highly Automated Driving, High Definition Street Map, Map Updates, Provisioning, Context Specific, Data
Efficient.
Abstract:
Highly automated driving vehicles are currently subject of strong research efforts to enable novel mobility
experiences. To achieve this goal a high definition street map is required. It provides the vehicles with
centimetre accurate references to all geographic objects in its surrounding. So this street map enables driving
capabilities of the automated vehicle in terms of safety and comfort for the passengers that could not be
obtained while only relying on the cars own inbuilt sensor equipment. This high definition street map has to
ensure the accuracy and timeliness of its data, necessary for the task of highly automated driving, at any time.
Therefore those maps have to be constantly provided with updates from a remote server. This paper describes
a protocol based mainly on preselection of contextual relevant map data to provide a car in an efficient way
with such a continuous stream of updates. The capabilities of the protocol have been evaluated on a map
database of Berlin. The obtained results verify that it achieves a significant decrease in transmission data and
processing time, compared to existing map update approaches.
1 INTRODUCTION
With the development of highly automated driving ve-
hicles also a new kind of navigational map a so called
high definition street map is introduced. This map has
got much higher requirements in terms of detail and
updates compared to the currently available naviga-
tion systems (see Section 2.1 and 2.2). The reasons
therefore are explained in the following.
At the current technological development status
(2016) the sensor system inside an automated driving
car is not able to replace completely the capabilities
of a human driver (Aeberhard et al., 2015),(Barker,
2015). Various weather conditions, but also bad
markings on the road, occlusion of objects through
other vehicles or just high speeds are sources of po-
tential sensor inaccuracy and false detection events
(Ziegler et al., 2014). For such scenarios, a high
definition street map is necessary to compensate the
sensor insufficiencies (Lawton, 2015). Companies
like Google (Madrigal, 2014), HERE (Stevenson,
2016), TomTom (TomTom, 2016), Continental (Ham-
merschmidt, 2016) and car manufacturers like BMW
(Bender et al., 2014), (Aeberhard et al., 2015) and
Tesla (Perkins, 2015) rely on high definition street
maps for their own highly automated vehicle pro-
grams. The map itself serves as an additional ”vir-
tual” sensor in the sensor system of the car. It signifi-
cantly enhances the performance and accuracy of per-
ception and localisation algorithms, which are neces-
sary for the vehicle to drive on its own (Jo and Sun-
woo, 2014). Only with the support of the high def-
inition street map the algorithms are able to perform
well, since they can rely on its weather independent
and centimetre accurate (Schumann, 2014) informa-
tion as reference.
To achieve this enhanced functionality and keep
the map operational it has to be constantly pro-
vided with a continuous stream of updates (Hammer-
schmidt, 2016). Only in this way it is possible to en-
sure constant validity of the maps data for the vehicles
manoeuvre planning. Any obtainable information rel-
evant to the car should be provided to it in advance
through the representation as a map object (Madrigal,
2014). This could be for example major events like
accidents or traffic jams as well as highly detailed
geographic references like the position and orienta-
tion of lane markings, curbs and traffic lights. In this
way the high definition street map changes its purpose
from sole road guidance to a severe feature (Boensch,
68
Jomrich, F., Sharma, A., Rückelt, T., Burgstahler, D. and Böhnstedt, D.
Dynamic Map Update Protocol for Highly Automated Driving Vehicles.
DOI: 10.5220/0006279800680078
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 68-78
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2016) to ensure safety and comfort for the passengers
inside the car.
To conclude, the high definition street maps neces-
sary for highly automated driving require an amount
of data to describe their highly detailed information,
which is increased by several factors compared to cur-
rently existing navigational maps. The timely con-
straints regarding the contained information further
require a constant stream of map updates. This makes
it necessary to think about new approaches to further
decrease the amount of data, which has to be trans-
mitted to the highly automated driving vehicles. Ex-
isting map update concepts as presented in Section
2 have been developed with a human driver and a
normal navigational map in mind. As explained the
car as an automated machine has got different and
more challenging requirements. Therefore those ap-
proaches are not sufficient enough to fulfill those re-
quirements while keeping the operational costs of the
high definition street map in a near minimum range.
Our approach, the Dynamic Map Update Protocol,
presented in this work aims to solve this problem by
investigating the contextual relevance of map updates
for a vehicle.
The outline of the remaining paper is described in
the following. In Section 2 current navigation sys-
tems and already existing map update concepts are
referenced. Afterwards the general idea of our ap-
proach and the concept in its details is explained in
Section 3. In Section 4 the evaluation scenario of the
city of Berlin to test the capabilities of our protocol is
described and the obtained results are stated. We con-
clude the paper with a short summary and an outlook
regarding future work.
2 RELATED WORK
The development of navigation systems for cars
started more than 25 years ago (Ishikawa et al., 1991)
and nowadays they are a widely used equipment.
Most of these systems can be grouped into two dif-
ferent categories in terms of how they obtain the map
information for routing purposes.
There are the so called offline navigation systems
that use map information from a data storage built
into the device itself. Examples for such systems are
fully integrated devices offered directly by the car-
manufactures or specific mobile navigation devices
provided by companies like Garmin
1
and TomTom
2
.
1
www.garmin.com
2
www.tomtom.com
On the other hand, there are the online navigation
systems mostly represented by smart phone applica-
tions like Google Maps
3
. Such systems are storing
their data on a distinct internet server, which is con-
taining the newest map material data. Each time a
route is requested by the user, the required route cal-
culation is performed on the server. The associated
map material and the guidance instructions are sub-
sequently downloaded on the device over a wireless
data connection.
Both approaches have got specific advantages and
disadvantages when compared to each other as ex-
plained in the following.
2.1 Offline Navigation Systems
The biggest advantage of an offline navigation system
is the fact that it can operate completely independent
from any kind of data connection. The whole naviga-
tion map material is stored and processed completely
within the device. To store as much information as
possible and to perform route calculations in shorter
time, proprietary binary storage formats are used for
the representation. This however renders the system
incapable of introducing updates to the initially stored
dataset as stated by Min et al.(Min, 2011). When an
updated map version is available, the complete map
material has to be exchanged, even though there might
only be some slight changes to the map itself. This of-
ten results in the copying of several gigabytes of data.
The update procedure therefore has to be performed
by the user himself and takes a long time to complete
it.
However, if an offline navigation system is never
updated its routing performance will degrade over
time, since the overall structure of the street network,
the base of the navigation system, is subject to change
(Ling, 2013).
Asahara et al. (Asahara et al., 2008) describe
in their work that the map material of Japan, which
they used for research on updates for normal street
maps, had to fill in 70 Megabyte of new roadside in-
formation over a period of 4 months. Mapping and
navigation company HERE
4
as well states that their
own worldwide map database receives 2.7 million up-
dates every day, leading to huge efforts in keeping the
map material up-to-date (Plack, 2013). Current of-
fline navigation systems are incapable of responding
to such quick changes, because the update cycle of the
3
https://play.google.com/store/
apps/details?id=com.google.android.apps.maps&hl=de
4
https://here.com/en
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
69

mapping companies (e.g. TomTom
5
) is normally in
the range of months.
2.2 Online Navigation Systems
Otherwise online navigation systems obtain up-to-
date map material over a wireless connection (e.g.
a smartphones cellular connection), each time the
user requests information about a new route. The
map server, which provides this information, gets
itself constantly updated through information pro-
vided by local authorities and other related informa-
tion sources. This advantage of always new data how-
ever is also a great disadvantage of online navigation
systems. They often do not have their own storage
space to save the obtained map data for future reuse.
Each time a route is being calculated the system has
to obtain the full map material for the specified area
again. This might lead to unnecessary redundancy in
the data transmission, which is directly connected to
increased costs for the cellular connection. It also
might happen that a data connection is not available
because of the users current position. In such a case,
online navigation systems cannot be used at all, since
a route calculation is not possible.
2.3 Provisioning of Incremental Map
Updates
To overcome the problems of current online and of-
fline navigation system approaches, as mentioned in
Section 2.1 and 2.2, versatile research has been con-
ducted in the field of map representation and over the
air map updates. Several different approaches provid-
ing so called incremental map updates have been pub-
lished (Cooper and Peled, 2001), (Bastiaensen and
others, 2003), (Min et al., 2008), (Asahara et al.,
2008), (Liu et al., 2010), (Min, 2011), (Lee and Lee,
2013).
The common idea presented by all these publica-
tions is that a navigation system (equipped with its
own storage space for map data) only receives incre-
mental updates of the initial map via over the air up-
dates. Only the changes between the old map version
of the car and the newly available version have to be
transmitted. This required update information is pro-
vided through a dedicated map server. The server it-
self has to keep track of the history of changes that
have been applied to its own database. When in-
formed about the current database version of the re-
questing car, the server then can generate individual
5
http://uk.support.tomtom.com/app/content/id/9/locale/en -
gb/page/4
updates for it. Obviously this approach reduces the
necessary data volume and update time tremendously
in comparison to the before mentioned common of-
fline and online approaches.
Min et al. (Min, 2011) develop and implement
such a database management system (DBMS) that
sends incremental map updates through a wireless
connection to a mobile device.
To be able to calculate the incremental map up-
dates the map itself is divided into smaller parts
through a grid. This common indexing approach di-
vides the initial map into sub parts. Each sub part
is than treated as a self maintained individual smaller
map, a so called map tile. These tiles are treated as in-
dividual and independent sectors regarding updates.
2.4 Ensuring Consistency between Map
Updates
To rely on this segmentation and to be able to build up
a reliable version history of all the map tiles, different
concepts exist and further requirements have to be sat-
isfied. For example it might be the case that through
an update of a single map tile the streets, which are
going through this tile, are losing their previous con-
nections to the streets of the surrounding map tiles. In
this situation a proper path planning for a vehicle is
not possible any more. Asahara et al. (Asahara et al.,
2008) provide a solution to this problem. They pro-
pose an updating concept that keeps track of the con-
nections of roadways. The proposed concept there-
fore updates the neighbouring map tiles as well, if
direct connections are effected through the initial up-
date. Through this approach it is ensured that the map
material is always consistent and correctly routeable.
Asahara et al. also stated that these intelligent updates
should only be applied locally to keep the amount of
update data which has to be provided via an over the
air connection as low as possible. Hence they propose
an area of 20 km to be updated in the surrounding of
the car as a good compromise between update consis-
tency and amount of data which has to be transferred.
Members of Hitachi Automotive Systems, Ltd.
(Hitachi, 2016) claim that the general approach of up-
dating individual map tiles as proposed by Asahara
et al. leads to unwanted ”updating cascades”. This
means if one map tile gets updated the neighbour-
ing tiles also have to be updated to ensure the rout-
ing capability of the map. Then the cascades lead
to unnecessary control data traffic over the network
for the exchange of further map updates. To solve
this problem they propose a different map update ap-
proach. Instead of updating specific map tiles, the up-
dates are provided through individual map update ob-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
70

jects. They consist of all the changes that have to be
applied to a certain, connected area of the map. Thus
no individual updates of all the affected map tiles are
necessary. The amount of data needed to store the
update information is also reduced.
2.5 Map Updates Along a Specific Route
Min et al., Asahara et al. and also the approach of
Hitachi do not directly take the calculated route of the
car into consideration for requesting the map updates.
They just describe the necessity of updating the map
in general.
An approach, which does in this way for the
update process, is described by Bastiaensen et al.
(Bastiaensen and others, 2003) as result of the
discussions made in the ActMap-Project. The basic
idea described in the paper, is to update only the map
tiles, which are crossed by the calculated route of
the car. Bastiaensen therefore describes the example
of a car driving through the city area of Bruessel.
Consequently, the car is only interested in updates
regarding the city of Bruessel, but not the whole
country of Belgium.
2.6 Foundation for the Dynamic Map
Update Protocol
Besides the ActMap Project (Bastiaensen and others,
2003) none of the mentioned papers in Section 2 ad-
dresses the requirements of the scenario of highly au-
tomated driving cars. All presented solutions have
been developed to update normal navigation maps,
which are currently in use. The general concepts
thereby can also be applied on high definition street
maps. However, the requirements and specifications
of high definition street maps as explained in Section
1 make it necessary to develop more sophisticated so-
lutions to provide map updates.
One of the first approaches, which focuses on ad-
vanced driver assistance systems and has been stan-
dardized by the European Telecommunications Stan-
dards Institute (ETSI), is the so called Local Dynamic
Map (ETSI, 2011). The ETSI however states that the
design specification does not include a high definition
street map for navigation purposes. The representa-
tion and the provisioning of such a map is seen as
area of further research.
Our approach as presented in Section 3 was built
on the existing concepts and provides a solution
specifically designed for these new requirements.
3 CONCEPT OF A DYNAMIC
MAP UPDATE PROTOCOL
The fundamental idea for our Dynamic Map Update
Protocol, which is presented below, is based on the
fact that the autonomous car has to be well aware of
its current driving course through a navigation sys-
tem. The protocol uses this fact to further decrease
the amount of data, which has to be provided as map
updates. Therefore it focuses on the relevance of the
data, which has to be transmitted to the vehicle. All
the existing incremental map update approaches of
Section 2 do not take the contextual relevance of the
update information into account. They provide map
tile updates to the vehicle whether they are relevant
for its current driving task or not. The Dynamic Map
Update Protocol now closes this gap by providing the
functionality to take information regarding the rele-
vance into consideration for processing map updates.
Therefore, it enables significant savings in terms of
transmission of data for a map update as shown in
Section 4.2. The specification of relevance or irrele-
vance of information however is subject to individual
selection criteria. The Dynamic Map Update Protocol
configured for the presented evaluation results consid-
ers a map update as relevant, if it is directly effecting
the current route on which the car travels. Other up-
dates in the surrounding are only considered as op-
tional updates with not such a high relevance for the
car. This is further illustrated by the example shown
in Figure 1. The Dynamic Map Update Protocol how-
ever can be configured with individual selection cri-
teria regarding the relevance. The stated definition of
relevance is just one possibility. The protocol there-
fore could be configured to provide relevant informa-
tion for special interest groups like bus, truck (NDTV,
2017) or taxi drivers, police officers and fire fighters.
Different routing functions can be defined for these
interest groups, satisfying their requirements. The re-
questing vehicles can then tell the map server via the
Dynamic Map Update Protocol which routing func-
tion is required for them.
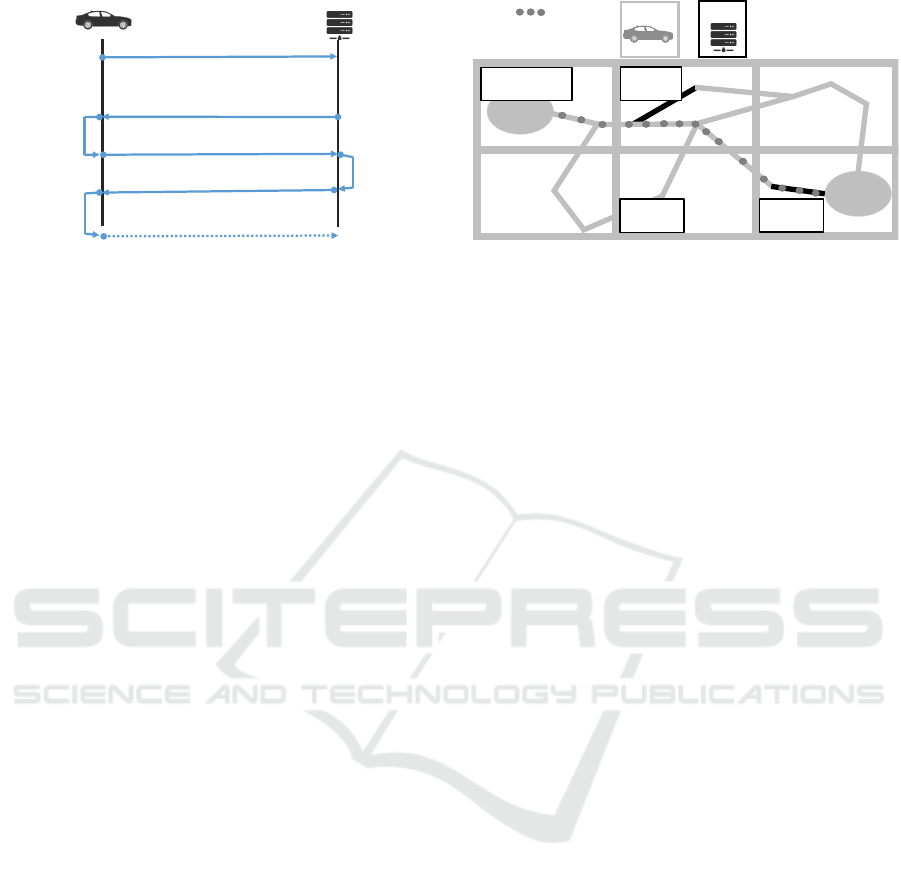
3.1 Basic Example
The example in Figure 1 illustrates the general work-
ing principle of the Dynamic Map Update Protocol.
The map database of a highly automated driving ve-
hicle is represented by six different map tiles. The
road network on which the car can base its navigation
is drawn in grey colour. The car wants to reach the
destination from its current start point. Therefore it
exchanges information regarding its own database as
explained in Section 3.3 with the map server through a
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
71

Car
Server
Destination
Mandatory
Map Tile
Optional
Map Tile
Start
Route
Figure 1: General working principle of the Dynamic Map
Update Protocol.
wireless connection. The server itself has got a newer
version of the map database with two available up-
dates indicated by black colour. The approaches pre-
sented in the Related Work (Section 2) would provide
both map tiles, which include the updates for the car.
The Dynamic Map Update Protocol instead takes the
relevance of the updates into account before the provi-
sion. Therefore it will only directly provide the right
of the two map tiles indicating available updates as
a mandatory update. This is due to the fact, that the
update directly influences the optimal path on which
the car travels to reach its destination. The update
in the left map tile is not mandatory for the car to
reach its current destination. The map tile therefore
is flagged as an optional update. The car can decide
itself whether it wants to receive this update or not.
The update for example might be of certain interest to
the car if it drives often in this area.
3.2 Protocol Fundamentals
Modern routing algorithms divide the amount of
streets into different subcategories accordingly to
their type. This hierarchical layering enhances the
overall performance of the route calculation process
as described by Min et al. (Min, 2011). For exam-
ple for longer travel distances only highway routes
are taken into consideration. Streets on lower lay-
ers like in the city or urban area are used when ar-
riving at the destination or for short distance calcu-
lations. Min et al. discuss this concept only to be
used for the routing algorithm, not for the map up-
date process. However we ourselves see it as a great
opportunity to provide map updates with the consider-
ation of their actual street layer (highway, urban road,
city street, ...) to further shrink down the amount of
data, which has to be provided to the vehicles in the
context of high definition street maps. As one of the
contributions of the Dynamic Map Update Protocol
we adapted and modified this general concept for the
use case of map updates. The division of different
Figure 2: Division of streets into highway and city layer in-
dicated by thick and thin lines for streets.
c
OpenStreetMap
contributors
Figure 3: Size of a city street layer map tile (bold) in com-
parison to a highway layer map tile.
c
OpenStreetMap con-
tributors
road types is performed as a preprocessing step on
the map database. All street types are clustered into
two different map layers. The first layer contains all
highways, the second the remaining other streets (see
Figure 2). Each of the two layers is than divided into
map tiles of different size (see Figure 3). This is done
due to the different available speed limits. The high-
way layer map tiles are larger than the city street map
tiles, as there the vehicles can drive a long distance
in less time. Highways are therefore expected to be
more important than city streets in terms of updates,
since they are more frequently used by the routing al-
gorithms. This design decision helps to reduce the
amount of control traffic, which has to be conducted
in the process of the protocol when requesting further
map tiles. When calculating its new route the highly
automated car receives only the map tile updates re-
quired for the currently used layer. While driving on
a highway for example it is not interested in the city
streets of a town nearby, because normally it never
goes through the town on its trip. It will therefore
only get updates regarding the highway, but not the
city streets layer in this area.
For the identification of a specific map tile we
use the indexing structure provided by the concept of
Geohashes (Suwardi et al., 2015). A Geohash is a
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
72
CAR Server
1. Start, Destination, Map Tiles used by
Car(ID, Versionnumber), Hash(Car Route)
2. Hash(Server Route), Map Tiles used by
Server(ID, Versionnumber), Updates for Car
Map Tiles
4. Request Updates for missing Map Tiles
based on the check
3. Car checks
own version of
Server Map
Tiles
5. Server
generates
necessary
Map Updates
6. Further Updates for Car Map Tiles7. Check if server
route hash =
car route hash
now
1. Start, Destination, Map Tiles used by
Car(ID, Versionnumber), Hash(Car Route)
Figure 4: The map exchange protocol sequence.
unique string that identifies a certain geographic area
on the globus. Each of them identifies its personal
rectangular bounding box. Neighbouring geographic
areas just differ in the last letter of the Geohash. By
adding up further letters to the end of the it the area
of the bounding box is shrinked accordingly. Geo-
hashes therefore are a well suited indexing structure
for the Dynamic Map Update Protocol. They satisfy
the needs of easy transitions between the different lay-
ers of the map, because upper layers cover completely
the area of a discrete amount of lower layer map tiles.
For the evaluation of the scenario of the city of Berlin
in Section 4 we chose the Geohash string length of
four letters for our highway street layer and five for
the city street layer. These string lengths correlate on
bounding box sizes of 39.1km x 19.5km for the high-
way layer and 4.89km x 4.89km for the city street
layer. Thus one highway layer map tile covers the
same area as 24 city street layer map tiles. The dif-
ferent sizes shall reduce the control flow overhead for
their provisioning by taking the achievable travel dis-
tances due to speed limits into account. The general
concept of different map layers can be enhanced fur-
ther by adding up more fine granular layers if bene-
ficial for future use cases of the Dynamic Map Up-
date Protocol. Also a different more specific indexing
scheme might be worth of consideration for future im-
provements.
3.3 Protocol in Detail
The Dynamic Map Update Protocol has to ensure that
after a performed map update, the requesting vehicle
will calculate the same route as the map server with
its updated personal database. However it should not
provide unnecessary map updates to keep the foot-
print of transmission costs as low as possible. The
necessary steps to solve this challenging task are ex-
plained in the following. Additionally they are illus-
trated by the sequence diagram in Figure 4.
1.) The car requests an update for its calculated route
Route
Route-Hash-Code:
50414C4B4F2
Destination
Start
ID: 5741, Layer 2
Version: 16
ID: 1
Version: 7
ID: 0
Version: 12
ID: 1
Version: 16
Car
Server
Figure 5: The sequence of used map tiles.
by providing the server the following parameters.
First of all the car sends the start- and destination-
point based on which it calculates the route by
itself. It further provides the server with the in-
formation about which tiles on the available map
layers it has used for the calculation of its route.
Figure 5 illustrates this in further detail. Provid-
ing this list of map tiles is done in a data efficient
way. Only the map tile that contains the start point
will be specified through a complete identification
ID (eg. ID 5741 in the example) and layer level
number (e.g. 1 for highway and 2 for city streets).
The following map tiles used by the car will be de-
scribed in relation to the previous map tile. There-
fore only one number (ID 0-3) is required, which
indicates the possible ways (up, down, left, right
from the last tile) in which the vehicle can move.
If the current map layer is changed it is indicated
by the provisioning of an additional new layer
number. Cause of drawing reasons the example
assumes that the car is travelling only on one layer
(2 for city streets). For each traversed map tile the
car will also provide its current personal version
number (e.g. version 16 of the map tile containing
the start point). The exact route, which the car will
use, is identified through a unique hash-code. The
hash-code of the exact route is mandatory to iden-
tify the relevance of the related map tiles, which
contain the route. Therefore each individual street
segment, that the car has to take on its course, is
identified by an own personal identifier and adds
up as an additional input value to a hash function.
After the completion of this process the generated
hashcode (e.g. 50414C4B4F2) of the current spe-
cific route is sent to the server.
2.) Based on the start and destination point, which
the server received from the car, it will calculate
the shortest available route between the two points
relying upon its own up to date map material. Af-
terwards it compares its own generated hashcode
and the provided one of the car. If both do not
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
73

match, this implies that the car has got an outdated
status of the map and needs to receive mandatory
updates from the server as explained in the fol-
lowing. If both hashcodes match, it means that at
least the current road to drive on is up to date in
terms of the server’s database.
It still might be the case that optional updates for
the car are available. These are updates for the
specific map tiles the car traverses, which do not
belong to the actual road it drives on (see Section
3). In future situations the car could drive in these
areas as well. So an update might still be ben-
eficial for the car. Therefore the server checks
the different versions of the traversed map tiles.
If they also match everything is up to date. The
server then just replies with a short response mes-
sage, which indicates that the map material of the
car does not require updates for the route.
If optional map updates are available, the server
will provide the car the IDs of the map tiles, which
could receive an update. Based on its driving cri-
teria and other parameters like remaining cellu-
lar data volume, the car can decide if and when it
wants to receive those updates later on.
If mandatory updates have to be provided, the
server directly generates those updates and sends
them back to the car.
If the server’s route uses other map tiles than the
car, the server provides its own hashcode and the
map tile IDs and version numbers used for calcu-
lation to it . This step is necessary to ensure that
the car does not find another as well outdated al-
ternative route in its own database.
3.) till 6.) Then the car has to complete the update
of its own map database for the newly provided
route. Therefore it checks the map tiles indicated
by the server in its own database for mandatory
map updates. It requests them accordingly and
gets them provided by the server.
7.) In rare occasions the provided map updates might
not be enough to ensure an up to date routing ca-
pability of the car for its current route. It still
might be the case that the car finds a faster, but
outdated alternative route using other map tiles.
The protocol has to ensure that the car uses the
currently fastest route now and in future calcula-
tions. Therefore the car has to check whether its
personal hash code matches with the server’s code
or not. If it does not, the whole procedure has to
be repeated with the new conditions. This how-
ever should not happen very often because of the
actual size of the map tiles. It makes shorter alter-
native routes most unlikely.
4 EVALUATION
To verify the capabilities of the Dynamic Map Up-
date Protocol, we conducted our evaluation on the
scenario of the German city of Berlin as explained
in the following Section 4.1. The obtained results are
presented than afterwards in Section 4.2.
4.1 Berlin OpenStreetMap Scenario
The currently most common map formats for high
definition street maps are OpenDrive(VIRES, 2011)
and the Navigation Data Standard with its Open Lane
Model (NDS Navigation Data Standard e.V, 2016).
To the best of our knowledge there exist no public
databases for testing and evaluation of those map for-
mats. Only small sample maps are available. They
are only usable to show the capabilities of the specific
map format. A map database with a long version his-
tory and a certain magnitude of applied changes how-
ever is necessary to properly test the capabilities of the
Dynamic Map Update Protocol. To satisfy these re-
quirements we decided to use the available map mate-
rial of the OpenStreetMap project (Haklay and Weber,
2008). OpenStreetMap itself offers database dumps
of its map material in intervals of up to one minute,
one hour and one day between the newest database
dump and its predecessor. The open source mapping
project is community-driven and has got a strong user
base of volunteers. However to take the update fre-
quency of a high definition street map into account
we selected the daily database dumps as the dataset
to be tested with the Dynamic Map Update Protocol.
By this decision it is ensured that the map material of
OpenStreetMap has a comparable amount of changes
that can be expected for a high definition street map
in far less time (well below one day). As the main-
tenance of map material is community-driven, we se-
lected the city of Berlin, Germany as the map mate-
rial to be considered for the evaluation process. The
map material of Berlin is highly detailed compared
to other areas of the world, which are often mapped
only very sparsely. This is due to the fact that the
community of OpenStreetMap in Berlin is consider-
ably active. This fact also ensures that the protocol
is tested under realistic conditions for the scenario of
highly automated driving. However it can be stated
that the Dynamic Map Update Protocol can be applied
to any form of navigational map, that includes a fea-
ture to weight the relevance of its content. The actual
amount of data, which can be saved in the process of
map updates, will scale accordingly to its update fre-
quency. As stated in Section 3.2 the map is divided up
into different layers regarding the type of streets. All
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
74

the streets considered as highways by OpenStreetMap
definition are grouped into one layer. All the other
streets form their own layer.
To ensure the significance of our test results we
conducted the evaluation as explained in the follow-
ing with a test data set of 30 consecutive days of
OpenStreetMap map dumps (from 1st August till 31st
August 2016).
With this data set we tested the protocol on dif-
ferences of 1 day and of 15 days between two map
databases to show the effects of map updates. The
setup with 1 day differences resembles the daily driv-
ing use case of a vehicle, the 15 day differences re-
sembles a situation, where a highly automated vehi-
cle is not used for a longer period of time. This could
be for example the case, when his owner has been on
vacation before.
4.2 Results
To verify the hypothesis that the Dynamic Map Up-
date Protocol has a significant impact on the reduc-
tion of transmitted map updates, the following two
tests described in Section 4.3 and 4.4 have been ex-
ecuted. For each test we compared the performance
between an existing simple incremental map update
approach (see Section 2) and the Dynamic Map Up-
date Protocol. The amount of processed map tiles
(processing load for the map server) and of changed
map objects (the actual data transmitted to the vehi-
cle) have been selected as quality metrics (see Table
1). The simple approach provides the vehicles with all
available map tile updates for its currently calculated
route as proposed by Bastiaensen et al. (Bastiaensen
and others, 2003). The Dynamic Map Update Pro-
tocol is configured to provide only updates for map
tiles along the route, which have been identified as
relevant, as defined in Section 3. To make sure that
the expected benefits are only gained through the Dy-
namic Map Update Protocol, both approaches have
been applied on the same preprocessed map database
(see Section 3.2). For each test a specific set of ran-
dom trips through the city of Berlin has been gener-
ated. The average trip driving distance of a European
is between 10 to 30 km, as stated by (Pasaoglu et al.,
2012). We included this fact in the evaluation process
and set up 60% of all the trips to be in this range. Half
of the remaining trips were configured to be either
above or below this value range. For the process of
routing we used the Dijkstra algorithm included in the
Each route consists out of a unique sequence of nodes
and connecting way IDs as specified by the Open-
StreetMap database, which we imported into pgRout-
ing. An exemplary excerpt of the achieved test results
Figure 6: Number of Map Tiles which have to be processed
for transmission for 10,000 independent trip requests.
is presented in Table 1.
4.3 Savings on the Server Side
The first test was conducted to gain an insight into
the amount of data that could be saved from being
processed and provided by the server side (e.g. tile
updates in Table 1). Therefore 10,000 individual trips
were processed by the two algorithms (see Figure 6).
For the whole set of trips the simple map update ap-
proach had to process an average of 17,272 map tiles
for a one day difference between the databases. For
the same set the Dynamic Map Update Protocol only
had to provide an average of 928 map tiles. This
means that the server had to process only 5% of the
overall update data when using the Dynamic Map Up-
date Protocol. As we expected, for the databases with
15 days of difference this ratio degraded to 22%. This
is due to the fact that the overall amount of updates to
be provided for the older map database increased. The
Dynamic Map Update Protocol had now an average of
9,945 map tiles to handle for transmission compared
to 43,732 for the simple map update approach. The
amount of savings is still huge.
4.4 Savings for a Highly Automated
Driving Car
In contrast to the map server the actual amount of map
data, which has to be transmitted to a requesting vehi-
cle, is its most important quality criteria. The request-
ing vehicle has to pay the cellular network provider
directly. The on board processing costs of the data
are negligible in comparison. To consider this situa-
tion we executed a second test. It was conducted to
evaluate the amount of actual map objects, which had
to be transmitted to the vehicles (e.g. objects with
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
75

Table 1: Exemplary excerpt of the achieved test results.
Execution
Run
Old Map
Date
New Map
Date
Dynamic
Map
Update
Proto-
col Tile
Updates
Simple
Map
Update
Approach
Tile
Updates
Tile Sav-
ings in %
Dynamic
Map
Update
Protocol
Objects
with
Changes
Simple
Map
Update
Approach
Objects
with
Changes
Object
Savings
in %
1 1-8-2016 2-8-16 1,128 7,413 84.78% 30,427 85,734 64.51%
2 2-8-2016 3-8-16 169 3,252 94.80% 597 9,567 93.76%
... ... ... ... ... ... ... ... ...
changes in Table 1). The amount of map tiles, used as
evaluation metric in the first test, is not a direct indi-
cator therefore. It is expected that different trips will
often use the same connecting streets (e.g. main roads
or highways), which results in a decreasing amount of
map objects to be delivered to a car over time. To re-
semble this behaviour we created a scenario of a car
requesting 100 consecutive trips. In contrast to the
server scenario the provided map updates were stored
as already available in the databases of the vehicle for
the remaining amount of requests. After each of 10
requests we took a snapshot of the additionally pro-
vided map objects. The obtained results are presented
by Figure 7 for one day and by Figure 8 for 15 days
of difference in time. Both figures show that the Dy-
namic Map Update Protocol in average always stays
below the amount of data, which is provided by the
simple map update approach. The Dynamic Map Up-
date Protocol only had to provide an average of 43.1
map objects for the full sequence of 100 trips com-
pared to an average of 70.6 for the simple map up-
date approach for one day time difference. For the
time difference of 15 days we achieved similar results
(an average amount of 775.4 map objects for the Dy-
namic Map Update Protocol and 962.5 for the simple
map update approach). To ensure the statistical signif-
icance of the achieved means we further conducted a
paired t-test on the test results. The obtained p-values
for the different amount of requests are presented in
Table 2 and indicate clearly that we can reject the
null hypotheses H
0
: ”The two approaches provide the
same overhead in terms of update data.”
H
0
: µ
dynamicMap
= µ
simple
(1)
Thus we accept the alternative hypothesis H
1
: ”The
Dynamic Map Update Protocol transmits less data
than the simple map update approach.”
H
1
: µ
dynamicMap
< µ
simple
(2)
Where µ is the mean of the number of updated map
objects.
To conduct 100 trips in a temporal sequence would
only leave around 5 minutes for each of the trips to
Figure 7: Map objects provided after 10 to 100 consecutive
requests. Databases with 1 day difference.
be finished in average over an 8 hours working day. It
is highly expected with reference to (Pasaoglu et al.,
2012) that nearly all drivers won’t come close to this
huge amount of requests. Therefore the behaviour of
the Dynamic Map Protocol is beneficial too. It can
be seen in both figures that the simple map update
approach provides most of the overall map updates
very early (e.g. after 20 requests for 1 day of differ-
ence). The Dynamic Map Update Protocol however
shows a more steady increase in providing the neces-
sary map updates. Therefore it saves even more data
when not requesting a huge amount of daily naviga-
tion requests.
To ensure that the achieved results were not influ-
enced by the chosen set of 100 trips we conducted an-
other test in which 1,000 independent cars performed
10 consecutive trips. These results are presented in
Figure 9 and show that the Dynamic Map Update Pro-
tocol outperforms the simple map update approach
also under those test conditions.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
76

Table 2: Obtained p-values of the paired t-test for the results of the second test.
number of re-
quests
10 20 30 40 50 60 70 80 90 100
1 day time dif-
ference
1.90e-06 1.46e-06 1.06e-06 2.69e-06 9.75e-07 5.40e-07 1.40e-06 1.42e-06 1.36e-06 1.40e-06
15 days time
difference
8.60e-09 3.96e-09 1.36e-09 7.14e-11 1.39e-12 1.69e-13 3.43e-11 2.12e-10 4.14e-11 8.03e-11
Figure 8: Map objects provided after 10 to 100 consecutive
requests. Databases with 15 day difference.
Figure 9: Map objects provided to 1,000 independent vehi-
cles performing 10 consecutive trips.
5 CONCLUSIONS AND FUTURE
WORK
This paper presents the Dynamic Map Update Proto-
col. The protocol has been developed to provide a
new data efficient strategy to update high definition
street maps, which are required for future highly au-
tomated vehicles to be able to drive. In contrast to ex-
isting map updating concepts our protocol takes the
relevance of the map data into account for the pro-
cess of update generation. To verify the capabilities
of the newly developed protocol extensive evaluation
tests with OpenStreetMap databases of the German
city of Berlin have been conducted. The gained re-
sults show that the Dynamic Map Update Protocol
achieves a significant decrease in transmission data
and processing time to enable the same driving tasks
compared to existing solutions. The current configu-
ration of the protocol still leaves further optimisation
potential for future work. Dynamic indexing struc-
tures that adapt themselves to the requirements of the
highly automated driving vehicle and even more ef-
ficient data transmission concepts (resolving the gen-
eral concept of map tiles) are two research directions,
which we will investigate further.
REFERENCES
Aeberhard, M., Rauch, S., Bahram, M., Tanzmeister, G.,
Thomas, J., Pilat, Y., Homm, F., Huber, W., and
Kaempchen, N. (2015). Experience, results and
lessons learned from automated driving on germany’s
highways. In IEEE Intelligent Transportation Systems
Magazine, volume 7, pages 42–57.
Asahara, A., Tanizaki, M., Morioka, M., and Shimada,
S. (2008). Locally differential map update method
with maintained road connections for telematics ser-
vices. In Mobile Data Management Workshops, 2008.
MDMW 2008. Ninth International Conference on,
pages 11–18. IEEE.
Barker, P. (2015). Industry expert explains why
autonomous cars need a map - HERE 360.
http://360.here.com/2015/05/07/brad-templeton-
autonomous-cars-maps/, [online accessed 2016-04-
08].
Bastiaensen, E. and others (2003). ActMAP: real-time map
updates for advanced in-vehicle applications. In Pro-
ceedings, 10th World Congress on ITS, Madrid.
Bender, P., Ziegler, J., and Stiller, C. (2014). Lanelets:
Efficient map representation for autonomous driving.
In Intelligent Vehicles Symposium Proceedings, 2014
IEEE, pages 420–425. IEEE.
Boensch, R. (2016). With high resolution into the
autonomous world. VDI Nachrichten Ausgabe
03, http://www.vdi-nachrichten.com/Technik-
Wirtschaft/Hochaufloesend-in-autonome-Welt,
[online accessed 2016-12-05].
Cooper, A. and Peled, A. (2001). Incremental updating and
versioning. In Proceedings of 20 th International Car-
tographic Conference, pages 2804–2809.
Dynamic Map Update Protocol for Highly Automated Driving Vehicles
77

ETSI (2011). ETSI TR 102 863, Intelligent Transport Sys-
tems ( ITS ); Vehicular Communications; Basic Set of
Applications; Local Dynamic Map (LDM ); Rationale
for and guidance on standardization.
Haklay, M. and Weber, P. (2008). Openstreetmap: User-
generated street maps. In IEEE Pervasive Computing,
volume 7, pages 12–18.
Hammerschmidt, C. (2016). With data from the
cloud to the living map. VDI Nachrichten Aus-
gabe 03, http://www.vdi-nachrichten.com/Technik-
Wirtschaft/Mit-Daten-Cloud-lebenden-Karte, [online
accessed 2016-05-12].
Hitachi, A. L. (2016). Map update ser-
vice/solution. http://www.hitachi-
automotive.co.jp/en/products/cis/02.html, [online
accessed 2016-04-26].
Ishikawa, K., Ogawa, M., Azuma, S., and Ito, T. (1991).
Map navigation software of the electro-multivision of
the’91 toyoto soarer. In Vehicle Navigation and Infor-
mation Systems Conference, 1991, volume 2, pages
463–473. IEEE.
Jo, K. and Sunwoo, M. (2014). Generation of a precise
roadway map for autonomous cars. In IEEE Trans-
actions on Intelligent Transportation Systems, vol-
ume 15, pages 925–937.
Lawton, C. (2015). Why an HD map is an essen-
tial ingredient for self-driving cars - HERE
360. http://360.here.com/2015/05/15/hd-map-
will-essential-ingredient-self-driving-cars/, [online
accessed 2016-04-08].
Lee, S. and Lee, S. (2013). Map generation and updating
technologies based on network and cloud computing:
A survey. In International Journal of Multimedia and
Ubiquitous Engineering, volume 8, pages 107–114.
Ling, H. (2013). NavInfo: Incremental Update is
the Revolution for Map Production System.
http://www.navinfo.com/en/news/detail.aspx?id=944
&sort=3, [online accessed 2016-04-05].
Liu, Y., Yang, Z., and Han, X. (2010). Research for incre-
mental update data model applied in navigation elec-
tronic map. In Advanced Computer Control (ICACC),
2010 2nd International Conference on, volume 1,
pages 261–265. IEEE.
Madrigal, A. C. (2014). The Trick That Makes Google’s
Self-Driving Cars Work - The Atlantic - GOOGLE.
http://www.theatlantic.com/technology/archive/2014/
05/all-the-world-a-track-the-trick-that-makes-
googles-self-driving-cars-work/370871/, [online
accessed 2016-05-01].
Min, K. (2011). A system framework for map air update
navigation service. In ETRI Journal, volume 33, pages
476–486.
Min, K.-W., An, K.-H., Kim, J.-W., and Jin, S.-I. (2008).
The mobile spatial DBMS for the partial map air up-
date in the navigation. In Intelligent Transportation
Systems, 2008. ITSC 2008. 11th International IEEE
Conference on, pages 476–481. IEEE.
NDS Navigation Data Standard e.V (2016). NDS
Open Lane Model Press Release. http://www.nds-
association.org/wp-content/uploads/20160914-PR-
E.pdf, [online accessed 2016-11-14].
NDTV (2017). How UPS Trucks Saved Mil-
lion of Dollars by Eliminating Left Turns.
http://gadgets.ndtv.com/transportation/features/how-
ups-trucks-saved-million-of-dollars-by-eliminating-
left-turns-1657808.
Pasaoglu, G., Fiorello, D., Martino, A., Scarcella, G., Ale-
manno, A., Zubaryeva, C., Thiel, C., European Com-
mission, Joint Research Centre, and Institute for En-
ergy and Transport (2012). Driving and parking pat-
terns of European car drivers: a mobility survey. Pub-
lications Office. OCLC: 847460656.
Perkins, C. (2015). Tesla is mapping out ev-
ery lane on Earth to guide self-driving cars.
http://mashable.com/2015/10/14/tesla-high-
precision-digital-maps/#v3xHW6i4QSqU, [online
accessed 2016-04-06].
Plack, J. (2013). The unmatched quality
of HERE Maps content - HERE 360.
http://360.here.com/2013/03/27/the-unmatched-
quality-of-here-maps-content/, [online accessed
2016-05-01].
Schumann, S. (2014). Why were mapping down
to 20cm accuracy on roads - HERE 360.
http://360.here.com/2014/02/12/why-were-mapping-
down-to-20cm-accuracy-on-roads/, [online accessed
2016-05-01].
Stevenson, J. (2016). Making the invis-
ible visible with the HD Live Map.
http://360.here.com/2016/09/23/making-the-
invisible-visible-with-the-hd-live-map-video-demo/,
[online accessed 2016-11-14].
Suwardi, I. S., Dharma, D., Satya, D. P., and Lestari, D. P.
(2015). Geohash index based spatial data model for
corporate. In Electrical Engineering and Informat-
ics (ICEEI), 2015 International Conference on, pages
478–483. IEEE.
TomTom (2016). TomTom Enables Autonomous Driving.
http://automotive.tomtom.com/uploads/assets/993/14
75151547-autonomous-driving-product-info-
sheet.pdf, [online accessesd 2016-05-15].
VIRES (2011). OpenDRIVE - managing the road ahead.
http://www.opendrive.org/docs/VIRES ODR -
OCRG.pdf, [online accessed 2016-11-14].
Ziegler, J., Bender, P., Schreiber, M., Lategahn, H., Strauss,
T., and et. al. (2014). Making bertha drive - an au-
tonomous journey on a historic route. In IEEE In-
telligent Transportation Systems Magazine, volume 6,
pages 8–20.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
78
