
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
Cinzia Bernardeschi
1
, Marco Di Natale
2
, Gianluca Dini
1
and Maurizio Palmieri
1
1
Department of Information Engineering, University of Pisa, Largo L. Lazzarino 1, Pisa, Italy
2
Scuola Superiore Sant’Anna, Piazza Martiri della Libert
`
a 33, Pisa, Italy
Keywords:
AUTOSAR, Security, Information Flow, Static Analysis.
Abstract:
This paper presents a method to check data secure flow in security annotated AUTOSAR models. The ap-
proach is based on information flow analysis and abstract interpretation. The analysis computes the lowest
security level of data sent on a communication, according to the annotations in the model and the code of
runnables. An abstract interpreter executes runnables on abstract domains that abstract from real values and
consider only data dependency levels. Data secure flow is verified if data sent on a communication always
satisfy the security annotation in the model. The work has been developed in the EU project Safure, where
modeling extensions to AUTOSAR have been proposed to improve security in automotive communications.
1 INTRODUCTION
Modern automotive electronics systems are real-time
embedded system running over networked Electronic
Control Units (ECU) interconnected by wired net-
works such as the Controller AreaNetwork (CAN) or
Ethernet. Moreover, wireless connectivity is increas-
ingly used for additional exibility and bandwidth for
features like keyless entry, diagnostic, and entertain-
ment.
Recent research has shown that it is possible for
external intruders to intentionally compromise the
proper operation and functionality of these systems.
Koscher et al. demonstrated that if an adversary were
able to communicate on one or more of a car in-
ternal network buses, then this capability could be
sufficient to maliciously control critical components
across the entire car (including dangerous behavior
such as forcibly engaging or disengaging individual
brakes independent of driver input) (Koscher et al.,
2010). These results raise the question of whether and
how an adversary might be able to access a car inter-
nal bus (and thus compromise its ECUs) in the case
of absent direct physical access. Checkoway et al.
demonstrated that external attacks are indeed feasi-
ble (Checkoway et al., 2011) and categorized external
attack vectors as a function of the attacker ability to
deliver malicious input via particular modalities: indi-
rect physical access, shortrange wireless access, and
long-range wireless access. Charlie Miller and Chris
Valasek have recently demonstrated further remote at-
tacks (Wyglinski et al., 2013).
Recently, many research and industrial activities
have started to take security into account in the early
phases of the development cycle of automotive elec-
tronics systems, both by enforcing software program-
ming standards that prevent software defects that may
enable cyber-attacks (Checkoway et al., 2011), as
well as by implementing security mechanisms for se-
cure communication (Lemke et al., 2006) including
software delivery, installation and flashing (Adels-
bach et al., 2006)(Stephan et al., 2006).
The AUTomotive Open System ARchitecture
(AUTOSAR) standard is the standard for the model-
ing and development of software components in the
automotive industry (AUTOSAR, a). In AUTOSAR,
safety and security services are being standardised
with respect to the set of basic services that may be
required by the application, such as the basic cryp-
tographic functionalities provided by the Crypto Ser-
vice Manager (CSM) or the definition of integrity-
related message authentication codes (MACs) in mes-
sages (SecOC component). These modules are not
currently matched by corresponding models for secu-
rity at the application level.
The work (Bernardeschi et al., 2016) aims at
bridging this gap. A set of modelling extensions to ad-
dress cybersecurity requirements at modelling stage
in AUTOSAR have been defined, and a code genera-
tion tool has been developed that automatically syn-
thesizes the right services to use to achieve the se-
curity level specified by the developers. Security re-
704
Bernardeschi, C., Natale, M., Dini, G. and Palmieri, M.
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis.
DOI: 10.5220/0006288707040713
In Proceedings of the 3rd International Conference on Information Systems Security and Privacy (ICISSP 2017), pages 704-713
ISBN: 978-989-758-209-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
quirements are assigned to system components and
in-vehicle communication links between components,
and they are realized as stereotypes extending the AU-
TOSAR implementation provided by the IBM Rhap-
sody tool.
However, the way in which security annotations
can be specified, does not consider the problem of
dependencies between data that traverse components
and communication links in the AUTOSAR model.
For example, if integrity is requested for input data to
the Brake actuation sub-system, all the communica-
tion links traversed from the sensors originating the
data to the Brake sub-system must be protected. Oth-
erwise, the security constraint cannot be satisfied. We
introduce the concept of data secure flow. Data secure
flow is verified if, for every possible execution, data
sent on a communication always satisfy the security
annotation written in the model.
Dependencies between data in an AUTOSAR
model, can be studied using approaches for checking
secure information flow in programs (D. E. Denning,
1977). In particular, we use an approach based on
abstract interpretation (Cousot and Cousot., 1992), a
static analysis technique for the automatic extraction
of information about the possible executions of com-
puter programs. Abstract interpretation has been used
in (Barbuti et al., 2002) to analyse secure information
flow in a simple imperative language. We extend the
technique to cover the analysis of AUTOSAR models.
The main points of the approach are:
• an abstract interpreter executes the functional
units of software components on abstract domains
that abstract from real values and consider only
data dependency levels. A fixpoint iterative anal-
ysis computes the dependency between data writ-
ten/read at ports of the software components.
• since the analysis computes all possible depen-
dencies for any real execution of the functional
units, the lowest security level of data sent on a
communication is counted.
• data secure flow property is satisfied if the security
level computed by the analysis for data sent on a
communication always satisfy the security anno-
tations in the model.
We reduce the complexity of the analysis by
using static program analysis techniques (Nielson
et al., 2005), which analyse the source code with-
out executing the program. Static analysis techniques
are applied for enforcing information flow security
in programs in several works, the reader can refer
to (Sabelfeld and Mayers, 2003) for a survey. One of
the advantages of our approach is that, being based
on abstract intepretation, the analysis can be fully
Figure 1: AUTOSAR architecture.
automated. Moreover, the analysis scales up, since
AUTOSAR software components are analysed sepa-
rately.
The paper is organized as follows: Section 2
briefly introduces AUTOSAR and security annotated
AUTOSAR models. Section 3 outlines the data se-
cure flow problem addressed by this work. Section 4
introduces the problem of dependency between data
read/written at ports of software components in an
AUTOSAR model. Section 5 presents the secure flow
verification technique by assuming data dependencies
already determined. The method used for computing
data dependencies at the ports is shown in Section 6.
Section 7 concludes the paper.
2 AUTOSAR
AUTOSAR (AUTOSAR, a) is an open industry stan-
dard for automotive software architecture, founded in
2003 and developed by a partnership of automotive
Original Equipment Manufacturers (OEMs), suppli-
ers and tool vendors. AUTOSAR provides a standard
language for the description of application compo-
nents and their interfaces; and a methodology for the
development process.
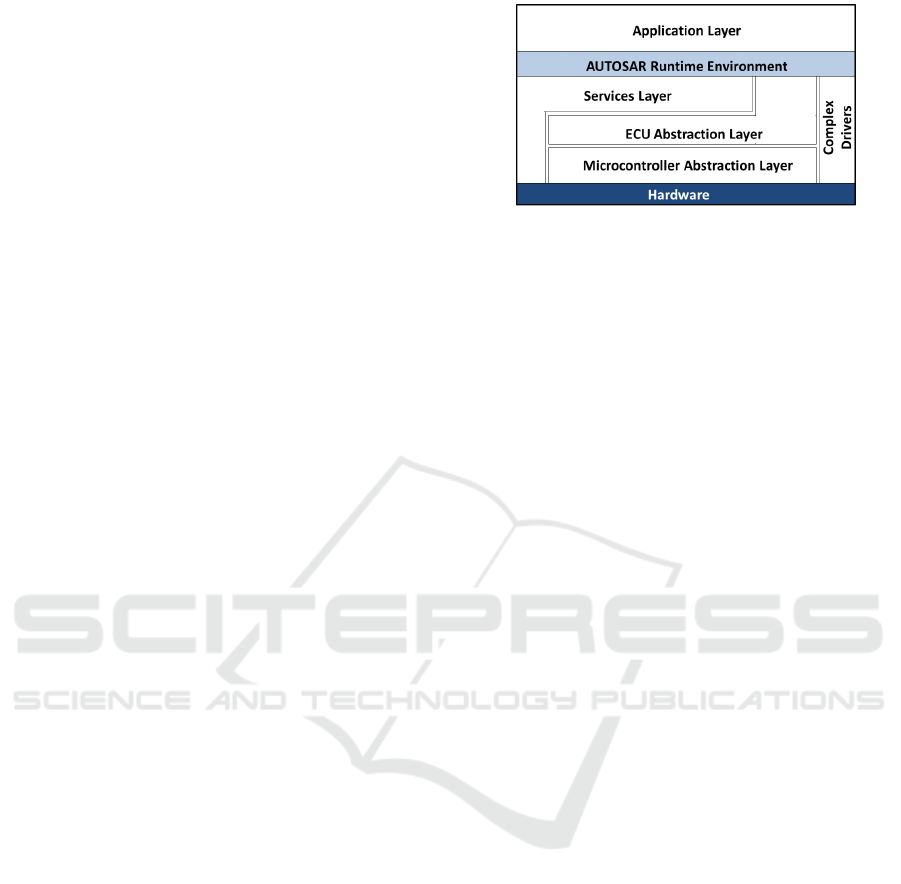
A fundamental concept in AUTOSAR is the sep-
aration between application and infrastructure, see
Figure 1. In particular, AUTOSAR defines a three-
layered architecture consisting of:
• Application layer
• Runtime Environment (RTE) layer
• Basic Software (BSW) layer
The application layer contains the Software Com-
ponents (SWCs) developed for the automotive sys-
tem functions by suppliers. The RTE layer is a mid-
dleware layer, automatically generated by tools and
providing a communication abstraction for software
components. Finally, the BSW provides basic ser-
vices and basic software modules to software com-
ponents.
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
705
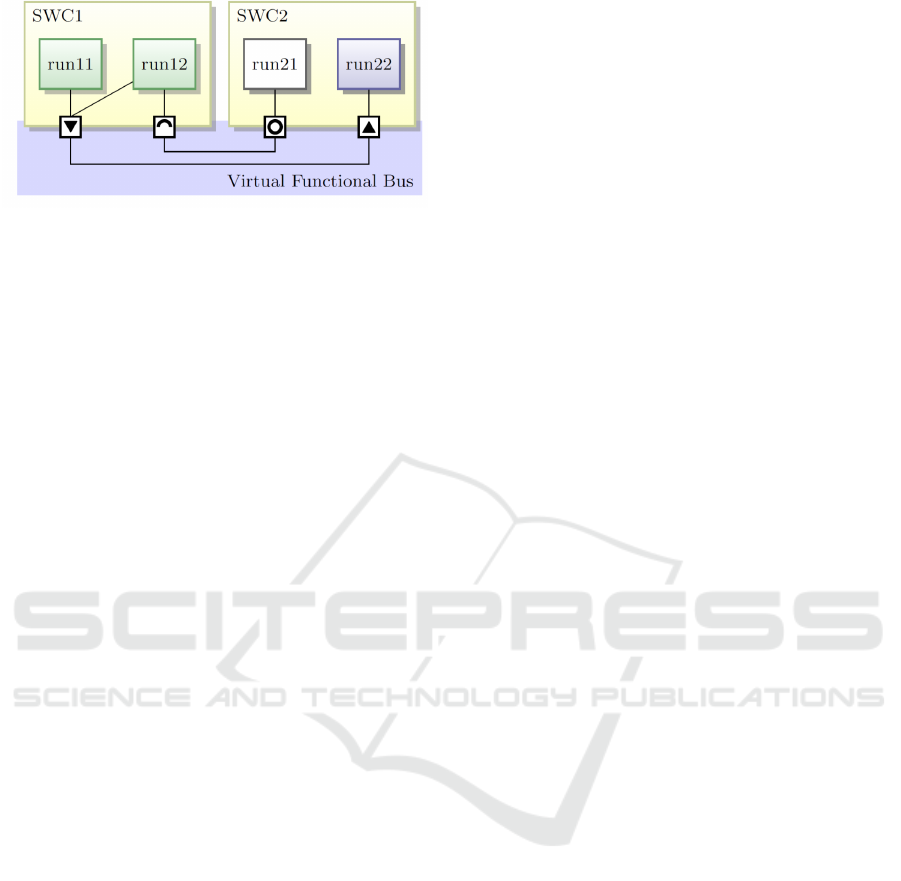
Figure 2: An example of AUTOSAR application model.
The application SWCs communicate using ports
that express client-server relationships (in this case
the port is typed by an operation interface) or send-
receive data interactions (in this case the port is typed
by a data interface consisting of a set of typed data
items). The development of the SWCs is based on
the Virtual Functional Bus (VFB) specified by AU-
TOSAR to deliver the conceptual foundation for the
communication of SWCs with each other and the use
of BSW services.
The internal behavior of SWCs consists of
runnables or functional units, represented by a func-
tion entry point. Each runnable indicates the port it
uses. Internally, the runnable code accesses the ports
through a set of standard API for port communication
and port service request (denoted as RTE services).
A set of events triggering the execution of runnables
completes the set of the main modeling entities. A
runnable can be triggered by a timing event, by a data
send event, a data receive event or by the invocation
of a server call at the server port.
An example is shown in Figure 2. Runnable
r11 of SWC1 communicates with runnable r22 of
SWC2 through sender-receiver ports; Runnable r12
of SWC1 communicates with with runnable r21 of
SWC2 through client-server ports. Moreover, r21 is
triggered by the invocation of the service at the server
port.
AUTOSAR allows software components to be de-
veloped independently of the underlying hardware,
which means that they are transferable and reusable.
2.1 Security Annotated Autosar Models
In (Bernardeschi et al., 2016), AUTOSAR models are
extended with security annotations. Two modelling
extensions are introduced:
• the trust level of a software component
• the security requirement of a communication link
A software component may be associated to a trust
level which specifies to what extent the element can
be trusted to provide the expected function, or service
with respect to attacks targeted to compromise the
functionality of the element. Without loss of gener-
ality, we assume two trust levels: high and low. Soft-
ware components with high trust level are executed
on secure and reliable hardware.
To protect in-vehicle communications from cyber
threats such as eavesdropping, integrity and spoofing,
a communication link may be associated to a security
requirement which represents the level of security that
data sent on the link must satisfy. The proposed secu-
rity extensions are confidentiality and integrity of the
exchanged information.
The security requirement can assume one of the
following values: none, conf, integr, both. These four
values codify no security, confidentiality, integrity
and, both confidentiality and integrity, respectively.
Figure 3 shows an example of AUTOSAR anno-
tated model. The example represents an application
in which data collected by sensors (lidars, radars and
cameras), together with the position information com-
ing from the GPS system, are used to detect road-
markings and objects (pedestrian, vehicles) on the
road. Path Planning, Lane Keeping and Lane Depar-
ture Warning are active safety functions that receive
such data and send commands to actuators (steering,
throttle and brakes).
For semplicity, we assume that 1) Throttle and
PathPlanning software components are assigned high
trust level; 2) the other components are assigned low.
Moreover, we assume that 1) Throttle request link is
annotated with data integrity security requirement; 2)
the other comminication links have no security re-
quirements.
Finally, we assume send/receive data communi-
cations between components. Moreover, in the fig-
ure, dependencies between data read/writen at ports
of PathPlanning are shown as dotted lines internal to
the component.
3 PROBLEM STATEMENT: DATA
SECURE FLOW PROPERTY
We introduce the following definitions:
• Data Security. Every data is assigned a pair
htrust level,security requirementi that
characterises its degree of security. As data flow
through the components and the communication
links, its data security is updated.
• Data Secure Flow Property. When the system is
in operation, data security of data sent on a link
must have no lower trust level than the level of the
ForSE 2017 - 1st International Workshop on FORmal methods for Security Engineering
706

Figure 3: An example of security annotated model.
receiver component and no lower security require-
ment than the requirement of the link, both fixed
at design time through the security annotations in
the AUTOSAR model.
With reference to Figure 3, the trust level of data
received by Throttle component must be high. Throt-
tle receives data directly by PathPlanning, a high trust
level component, which in turn, receives data GPS,
which has a low trust level. Therefore Data se-
cure flow is violated. Assume GPS has a high trust
level. Data sent on Throttle request link must sat-
isfy integrity requirement. The dependency between
data read/written at ports in PathPlanning, makes the
property false, because such data depends on Vehi-
cle position link, which does not have any security
requirement.
The problem is that security annotations are local
to single components and links, and the data secure
flow property may or may not be satisfied due to data
dependencies in the model.
What we propose is a static analysis approach to
check data secure flow property in security annotated
models. For the analysis, we define an ordering be-
tween security values with the meaning that if secu-
rity value s preceedes security value s
0
, then s is in
some way ”lower in security degree” to s
0
.
Fundamentals to the analysis are the structure of
the system model (components, runnables, ports and
links), the ordering relation mentioned above, and the
dependencies between data in the model.
4 DATA DEPENDENCIES IN AN
AUTOSAR MODEL
The basic idea is modelling ports as variables, and
modelling runnables as functions in the programming
language. In particular,
• for send-receive data communications, reading a
data at a port is equivalent to reading the variable;
writing a data at a port is equivalent to writing the
variable.
• for client-server communications, the client re-
quest is equivalent to a function call, that corre-
sponds to the invocation of the runnable imple-
menting the requested service.
• for updates of variables that trigger the execu-
tion of runnables, the write of the variables cor-
responds to the invocation of the functions imple-
menting the runnables. If a variable corresponds
to a port of a send/receive data communication, a
write of the variable may trigger a runnable local
to the sender SWC or a runnable at the receiver
SWC.
The analysis we present is based on abstract inter-
pretation technique (Cousot and Cousot., 1992):
• the standard operational semantics of the pro-
gramming language is enhanced to include infor-
mation useful in the analysis.
• abstract domains are identified and abstract se-
mantics rules are defined that execute the program
on abstract domanins.
• the abstract rules compute the flow of information
in the program
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
707

The rules take into account explicit and implicit
flow of information. Let v
pi
and v
p j
be variables cor-
respondent to p
i
and p
j
ports.
An example of explicit information flow is:
x := v
pi
; v
p j
:= x + 3;
An example of implicit information flow is:
if (v
pi
== −1) then v
p j
:= 0 else v
p j
:= 1
In both the examples above, the value of variable v
p j
depends on the value of variable v
pi
. Data written to
port p
j
depends on data read at port p
i
.
For functions, information flows through function
parameters and return. An example of explicit infor-
mation flow is:
x := v
pi
; f (x);
The call to a function without parameters and re-
turn, can be the cause of an information flow, in case
of implicit flow:
if (v
pi
== −1) then f ();
Function f is invoked depending on the value read at
port p
i
.
5 DATA SECURE FLOW
PROPERTY VERIFICATION
Given an AUTOSAR model, we use the following no-
tations and definitions:
• C = {c
1
,c
2
,··· ,c
k
} is the set of SWCs.
• P = {p
1
,··· , p
n
} is the set of ports of the SWCs.
• L = {l
1
,··· ,l
m
} is the set of links. A link de-
notes a connection between two ports. The link
l = (p
i
, p
j
) connects the port p
i
to the port p
j
,
with p
i
output port of the sender SWC and p
j
in-
put port of the receiver SWC.
• trustlevel(c) is the trust level assigned to the
software component c.
• securityrequirement(l) is the security require-
ment assigned to link l.
In addition we use the following definitions and
functions:
• Given a port p, cmp(p) is the component to which
the port belongs.
• Given a port p, Deps(p) is the set of ports on
which the data written at port p depends (see sec-
tion 6).
Figure 4: Order relation on (a) trust levels (b) security re-
quirements.
Given a link l = (p
i
, p
j
) ∈ L,
1. hδ
l
,µ
l
i = hhigh, bothi
2. ∀p ∈ Deps(p
i
)
δ
l
= glb(δ
l
,trustlevel(cmp(p)))
3. ∀l
0
= (q,q
0
),| q,q
0
∈ Deps(p)
µ
l
= glb(µ
l
,securityrequirement(l
0
))
Figure 5: Algorthm for data security of link l.
Definition 1 (Trust Level). Let A = {low,high} be
the set of trust levels, ordered by low @ high, where
@ is the lower between levels, see Figure 4 (a). Let glb
denote the greatest lower bound, and lub the least up-
per bound between levels: it is glb(low, high) = low
and lub(low,high) = high.
Definition 2 (Security Requirement). Let B =
{con f ,integr,both,none} be the set of security re-
quirements of links, partially ordered by @, as shown
in Figure 4 (b). Let glb denote the greatest lower
bound, and lub the least upper bound between lev-
els. (B,@) is a lattice (i.e., every pair of elements of
B has both a greatest lower bound and a least up-
per bound). For example, glb(integr,con f ) = none;
lub(integr,con f ) = both
Note that conf and integr are not ordered, because
one is not ”lower in security degree” to the other.
5.1 The Method
In the analysis, we compute the lowest trust level and
the lowest security requirement of data sent on a link l
(htrust level,security requirementi), with the
algorithm shown in Figure 5. The algorithm records
in δ
l
and µ
l
such levels (hδ
l
,µ
l
i).
Assume l = (p
i
, p
j
). Data sent on the link l are
data written at port p
i
.
First the algorithm sets δ
l
equal to the greatest
trust level and µ
l
equal to the greatest security require-
ment. Then for each port p on which data sent on the
link l depends (p ∈ Deps(p
i
)) , δ
l
is updated to con-
sider the trust level of the SWC to which the port p
ForSE 2017 - 1st International Workshop on FORmal methods for Security Engineering
708

belongs: the trust level δ
l
is set equal to the greatest
lower bound between the currrent value and the trust
level of the SWC to which port p belongs. Finally,
for each link l
0
in the model traversed by data sent
on link l (source and destination ports of l
0
belong to
Deps(p
i
)), µ
l
is updated: the security requirement µ
l
is set equal to the greatest lower bound between the
currrent value and the security requirement of the link
l
0
. Note that, at each step δ
l
can only be downgraded;
analogously, µ
l
can only be downgraded.
An AUTOSAR model satisfies data secure flow if
for each communication link, 1) the trust level of des-
tination component of the link is not greater than the
trust lowest trust level of data sent on the link, and 2)
the security requirement of the communication link
is not greater than the lowest security requirement of
data sent on the link.
Definition 3 (Data Secure Flow Property). Given
an AUTOSAR model with security annotations, the
model satisfies the data secure flow property if, for
each link l = (p
i
, p
j
) ∈ L, with hδ
l
,µ
l
i the data secu-
rity of data sent at l:
trustlevel(cmp(p
j
)) v δ
l
∧ securityrequirement(l) v µ
l
6 DEPENDENCIES BETWEEN
PORTS OF AN AUTOSAR
MODEL
A port p
j
does not depend on port p
i
if data sent at p
j
are independent from data received at p
i
. We formally
define port dependencies as follows.
Definition 4 (Port Dependencies). Let us consider
an AUTOSAR model. A port p
j
does not depend on
the port p
i
if: for each pair of values v
1
,v
2
at p
i
,
with v
1
6= v
2
, it is: p
j
(p
1
,··· , p
i−1
,v
1
, p
i+1
,··· , p
n
) =
p
j
(p
1
,··· , p
i−1
,v
2
, p
i+1
,··· , p
n
) for each possible ex-
ecution, where p
j
(p
1
,··· , p
i−1
,x, p
i+1
,··· , p
n
) is the
value written on port p
j
when x is read from input
port p
i
.
In the analysis, we define an AUTOSAR model as
a tuple A = (R,Var,C, Θ), that consists of a set R of
runnables, a set Var of variables, a set C of connec-
tions (links), a set Θ of levels. In particular
• Var = V P ∪ V IR ∪ V G is a set that consists of
the set V P of port variables, the set V IR of inter-
runnable variables, and the set V G of global vari-
ables of SWCs.
• R is the set of all runnables. A runnable r ∈ R is a
function r : Var → Var.
• C = {(src,dst) | src ⊆ V P ∧ dst ⊆ V P} is a set
of connections between port variables (src is the
source and dst is the destination port of the con-
nection).
• Θ = {θ
1
,··· ,θ
n
} is the set of levels, one level for
each port. The level of port p
i
is called θ
i
.
6.1 Data Dependency Levels
We assume the following set Θ = {θ
1
,θ
2
,··· ,θ
n
} of
dependency levels, one for each port. We consider
the powerset Σ = 2
Θ
, i.e. the set of all subset of Θ, or-
dered by subset inclusion. (Σ,⊆) is a complete lattice
(every pair of elements of Σ has both a greatest lower
bound, glb, and a least upper bound, lub). The lub
is given by the union (∪) and the glb is given by the
intersection of subsets (∩). Given X ⊆ Y , X ∪Y = Y
and X ∩ Y = X . The analysis operates over levels in
Σ. The singleton set {θ
i
} denotes a dependency from
input port p
i
. The set {θ
i
,θ
j
} denotes dependency on
both input ports p
i
and p
j
. The minimum of Σ is the
empty set.
6.2 Analysis of a Runnable
In the following we describe the basic concepts of the
analysis.
A program is a sequence q of commands. Let m
be a memory that contains all the variables accessed
by the program.
The execution of a program is a transition system
obtained by executing q starting from the initial mem-
ory, by applying the rules of the operational semantics
of the language. As an example, the rule for a simple
expression consisting of variable x is:
Expr
var
hx,mi −→
expr
m(x)
The semantics of the exptression x is the value of
x in memory m.
The rule for the assignment x := e is the follow-
ing, where e is an expression, and m[k/x] the memory
m, where the variable x is assigned the new value k:
Ass
he,mi −→
expr
k
hx:=e,mi −→ m[k/x]
If k is the evaluation of the expression e in mem-
ory m, the semantics of x:=e changes the memory by
assigning value k to variable x.
The operational semantics of the language is ex-
tended to convey the set of data dependency levels
during the execution.
• Each value is annotated with the set of dependen-
cies (both implicit and explicit);
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
709

Data become pairs (k,τ), where k is the value and
τ is the dependency level.
• and each command is executed under an environ-
ment σ that represents the lub of the dependencies
of the open implicit flows.
The notation (x:=e)
σ
, represents the execution of
the assignment under an environment σ.
For example, the dependencies of a variable ex-
pression, is given by le lub between the level of the
data in the variable and the level of the environment
in which the command is executed.
The previously introduced rules become the fol-
lowing, where M is the memory defined on extended
values:
Expr
var
M(x) = (k,τ)
hx
σ
,Mi −→
expr
(k, σ t τ)
Ass
he
σ
,Mi −→
expr
v
h(x:=e)
σ
,Mi −→ M[v/x]
The abstract semantics, abstracts from actual val-
ues and maintains only annotations on data dependen-
cies. let M
]
be the abstract memory. The abstract se-
mantics for the previous rules is following:
Expr
var
M
]
(x) = τ
hx
σ
,M
]
i −→
expr
lub(σ,τ)
Ass
he
σ
,M
]
i −→
expr
τ,σ
0
= lub(σ,τ)
h(x:=e)
σ
,M
]
i −→ M[σ
0
/x]
A program is executed on the abstract domain
starting from the abstract initial memory, and apply-
ing the abstract rules. We note that all branches of
conditional/iterative instructions are always executed,
due to the loss of real data in the abstract semantics.
In previous work (Barbuti et al., 2002), it is proved
that the transition system built by executing q with
the enhanced semantics is the same as the transition
system built with the standard semantics, for a simple
high level language. We extended the semantics rules
to include indirections, structures, arrays and function
calls (we assume Misra-C as programming language
of runnables (AUTOSAR, b)).
In particular, to deal with shared memory and
functions calls, a context file is introduced (similarly
to the approach in (Avvenuti et al., 2012)).
Variables are scalar in the following. For struc-
tures, a variable is used for each field. For arrays, we
abstract from array indexes.
6.3 Context File
A context file is defined to record information stored
in the shared memory of a SWC and information
about runnable calls.
The context file maintains:
• for each variable v ∈ Var, the entry v : σ, where σ
is the dependency level of data assigned to v;
• for each runnable r ∈ R, the entry
r(σ
1
,...,σ
k
)σ;σ
0
, where σ
1
,...,σ
k
are the
levels for the actual parameter, σ is the level
for the result and σ
0
is the level of the calling
environment.
In particular, during the analysis, for each vari-
able, the context file maintains the maximum depen-
dency level of data recorded in the variable.
For each runnable, the context file maintains how
the runnable is called in terms of the maximum level
of the calling environment, the actual parameters
and return. We assume parameters and return of
runnables, for generality.
Each port variable is initialised to the level of the
port. All other variables are initially assigned the low-
est level (
/
0). Runnables are initially assigned the low-
est level for calling environment, parameters and re-
turn.
Entries in the context file are manged in a special
way. Their dependency level never decreases. An as-
sigment to a variable in the context file, updates the
dependency level of the variable in the context file to
the lub between its current level and the level of the
assigned expression. Analogously, for runnable en-
tries.
Example. In the following, we will consider one
software component of a simple example of an AU-
TOSAR application (MathWorks, a). The software
component manages three runnable entities, 2 input
ports, 4 output ports and 4 inter-runnable variables
(irv1, irv2, irv3, irv4). Runnable 1 performs the sum
of the value read from the input port in1 and the value
from irv3 and writes the result in irv1; runnable 2 per-
forms the subtraction between irv1 and irv2, accumu-
lates the result and writes it on irv4 and on the out-
put port 4; finally Runnable 3 multiplies irv4 and the
value read from input port in2 and writes the result in
irv2. The data sent to the other output ports (1, 2 and
3) and in irv3 oscillate between 1 and -1 and is not
related to the other elements of the component.
The code of runnable r1 in the example is shown
in Figure 7.
For simplicity, we use in1, in2, and out1, out2,
out3, out4 as names of input/output port variables.
For example, RPort DE1 is called in1 and PPort DE1
is called out1.
A runnable is abstractly executed starting from its
local memory and the context file. The initial context
file and the local memories for the software compo-
nent are shown in Table 1.
ForSE 2017 - 1st International Workshop on FORmal methods for Security Engineering
710

Figure 6: A software component and its runnables.
FUNC(void) Run1(void) {
int8_T Delay_n;
Delay_n = rtDWork.Delay_DSTATE_a;
if(((int32_T)Rte_IStatus_Run1_RPort_DE1())==0)
{
rtB.Add = Rte_IRead_Run1_RPort_DE1()+
((real_T) Rte_IrvIRead_Run1_IRV3());
}
Rte_IrvIWrite_Run1_IRV1(rtB.Add); (*)
rtDWork.Delay_DSTATE_a = (int8_T)((int32_T)
(-((int32_T)rtDWork.Delay_DSTATE_a)));
Rte_IWrite_Run1_PPort_DE1(Delay_n);
}
Figure 7: Code of runnable r1.
6.4 Calls to RTE Functions
We deal with calls to RTE functions in the runnable
code as follows.
• Send/Receive data communication ports
RTE function for writing/reading a port are
mapped to read/write of the corresponding vari-
able:
Rte IRead Run1 RPort DE1() is mapped to the
read of variable RPort DE1
Rte IWrite Run1 PPor DE1(Delay n) is
mapped to the write of variable of the port:
PPort DE1 := Delay n.
• Updates of variables that trigger runnables
The calling environment of the triggered runnable
is updated in the context file. The runnable is ex-
ecuted into an environment which depends on the
level of the variable.
• Client/server ports
RTE function for client/server communication
This function trigger the runnable that implements
the service. The calling environment of the trig-
gered runnable is updated in the context file. The
runnable implementing the service is executed
into an environment which depends on the level
of the environment of the caller.
F := F
0
,T := R
while(T 6=
/
0)
select r ∈ T
T := T − {r}
F
0
:= EXEC(r,F)
if(F
0
6= F)
F := F
0
T := R
Figure 8: Analysis of an AUTOSAR model.
6.5 Analysis of an AUTOSAR Model
The analysis of an AUTOSAR model is based on an
iterative process that performs the abstract execution
of all runnables in R, using an abstract context file. In
the initial abstract context, the level of each port vari-
able is fixed to the level of the port, and the level of
every other variable is set to
/
0. If during the analysis
a level in the context file changes, all runnables must
be re-executed.
The analysis uses an abstract interpreter, named
EXEC, that analyses a single runnable. EXEC per-
forms an abstract execution of the runnable starting
from a context file F and producing a newcontext file
F
0
. The state of a runnable is a tuple hσ,q,F,M
]
i,
where q is the code of the runnable, F is the abstract
context file and M
]
is the abstract memory and σ is
the environment.
The analysis terminates when, starting from a con-
text file, all runnables are executed and the context is
not changed.
The main steps of the iterative analysis are shown
in Figure 8, where F
0
is the initial context.
A the end of the analysis, the context file records
the dependencies for ports of all the software com-
ponents. The approach is conservative, in the sense
that all possible dependencies for any real execution
of the runnables are detected. False dependencies are
possible, since in the abstract analysis all branches of
control instructions are executed, even those that in
real execution would have never been executed.
Example In the following, we report results of the
application of the method to the example.
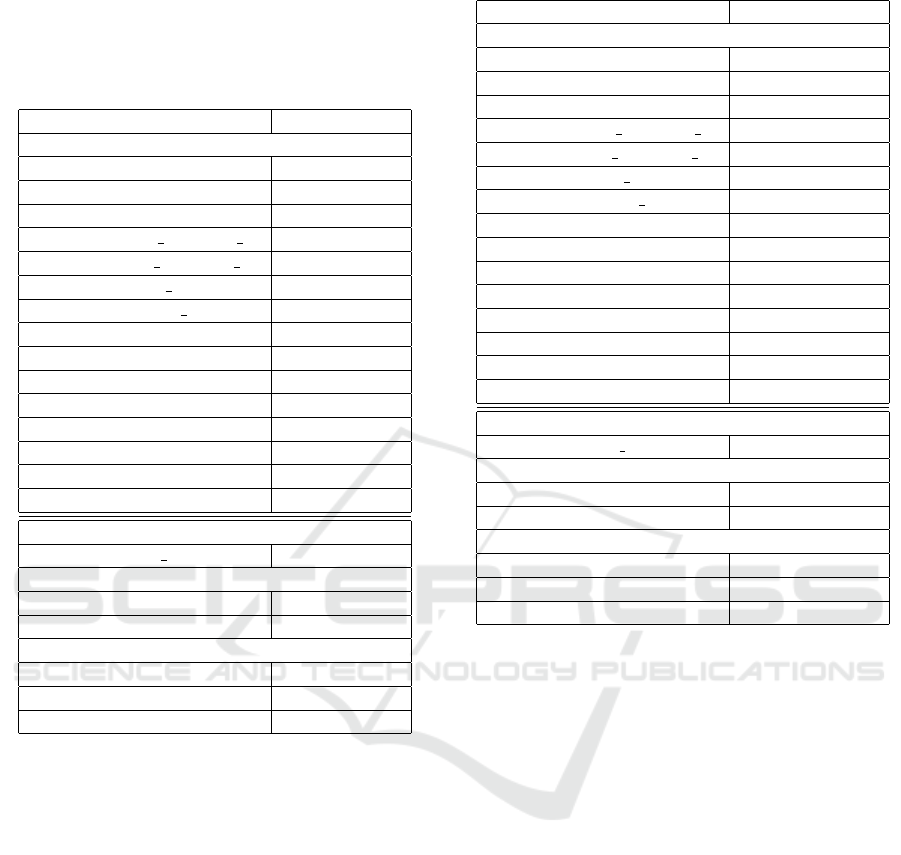
The analysis starts from Table 1, that reports the
inital context file and local memories of runnables.
Let us consider the abstract execution of runnable
1. The if instruction causes the beginning of an im-
plicit flow. According to the semantics rules, instruc-
tions in both branches of an if are executed under an
environment set to the level of the condition of the
if. On entering the if instruction, the environment
is upgraded to the level of the variable (RPort
DE1).
The implicit flow terminates at instruction (*), which
is the first instruction out of the scope of the if. At
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
711
this point, the environment is downgraded to the level
before the execution of the conditional instruction.
Table 2 reports the state of the memory at the end
of the analysis of the three runnables.
Table 1: Initial context file and local memories.
Variables Dependencies
Context file
in1 { in1 }
in2 { in2 }
rtb.Add
/
0
rtdWork.Delay DSTATE a
/
0
rtdWork.Delay DSTATE m
/
0
rtdWork.Delay DSTATE
/
0
rtdWork.Integrator DSTATE
/
0
irv1
/
0
irv2
/
0
irv3
/
0
irv4
/
0
out1 { out1 }
out2 { out2 }
out3 { out3 }
out4 { out4 }
Runnable R1
Delay n
/
0
Runnable R2
Delay
/
0
SubtracterBuffer
/
0
Runnable R3
tmp
/
0
*tmp
/
0
OutputBuffer
/
0
With our static analysis we can assert that the out-
put port out4, irv2 and irv4 depend on both the input
ports, meanwhile the irv1 only depends on input port
in1. With a simple approach where all output vari-
ables of a runnable depends on all its input variables
irv1 would depend on input port i2 too.
7 CONCLUSIONS
Security in automotive is becoming increasingly im-
portant and should be taken into account from the
early stages of the system design.
In this paper we present a methodology for the
verification of data secure flow in security annotated
AUTOSAR models.
The method we present is based on information
flow analysis and abstract interpretation. The analy-
sis computes the lowest security level of data sent on
a communication, according to the annotations in the
Table 2: Final context file and local memories.
Variables Dependencies
Context file
in1 { in1 }
in2 { in2 }
rtb.Add { in1 }
rtdWork.Delay DSTATE a
/
0
rtdWork.Delay DSTATE m
/
0
rtdWork.Delay DSTATE
/
0
rtdWork.Integrator DSTATE { in1, in2 }
irv1 { in1 }
irv2 { in1, in2 }
irv3
/
0
irv4 { in1, in2 }
out1 { out1 }
out2 { out2 }
out3 { out3 }
out4 { out4, in1, in2 }
Runnable R1
Delay n
/
0
Runnable R2
Delay
/
0
SubtracterBuffer { in1, in2 }
Runnable R3
tmp { in2 }
*tmp { in2 }
OutputBuffer
/
0
model and the code of runnables. In particular, our
approach for data flow analysis can be put at an inter-
mediate level between a syntactic approach (Volpano
et al., 1992; Bernardeschi et al., 2004) and a fully se-
mantic one (Leino and Joshi., 1998). The approach
is dynamic and thus allows us to be more permissive
than a syntactic approach. Moreover, the approach is
based on a transition system and thus has the advan-
tage of being fully automatic.
On a security annotated AUTOSAR model, secu-
rity properties can be specified and formally proved.
Moreover, the possibility of automatically generate
security components reduces errors in the develop-
ment phase.
ACKNOWLEDGEMENTS
This work has been developed under the framework
of the European project SAFURE (Safety And Se-
curity By Design For Interconnected Mixed-Critical
Cyber-Physical Systems) under grant agreement No
644080. Moreover, the research has been supported
in part by the PRA 2016 project entitled Analysis
ForSE 2017 - 1st International Workshop on FORmal methods for Security Engineering
712

of Sensory Data: from Traditional Sensors to Social
Sensors, funded by the University of Pisa.
REFERENCES
Adelsbach, A., Huber, U., and Sadeghi, A.-R. (2006). Se-
cure software delivery and installation in embedded
systems. In Embedded Security in Cars, pages 27–49.
Springer.
AUTOSAR (a). http://www.autosar.org.
AUTOSAR (b). https://www.autosar.org/fileadmin/files/
releases/2-0/software-architecture/rte/standard/
autosar sws rte.pdf.
Avvenuti, M., Bernardeschi, C., De Francesco, N., and
Masci, P. (2012). Jcsi: A tool for checking secure
information flow in java card applications. Journal of
Systems and Software, 85(11):24792493.
Barbuti, R., Bernardeschi, C., and De Francesco, N.
(2002). Abstract interpretation of operational seman-
tics for secure information flow. Inf. Process. Lett.,
83(2):101–108.
Bernardeschi, C., De Francesco, N., Lettieri, G., and Mar-
tini, L. (2004). Checking secure information flow in
java bytecode by code transformation and standard
bytecode verification. Software - Practice and Expe-
rience, 34(13):1225–1255.
Bernardeschi, C., Del Vigna, G., Di Natale, M., Dini,
G., and Varano, D. (2016). Using AUTOSAR High-
Level Specifications for the Synthesis of Security
Components in Automotive Systems, pages 101–117.
Springer International Publishing, Cham.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., Kohno, T., et al. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
In USENIX Security Symposium. San Francisco.
Cousot, P. and Cousot., R. (1992). Abstract interpreta-
tion frameworks. Journal of Logic and Computation,
4(2):511–547.
D. E. Denning, P. J. D. (1977). Certification of programs
for secure information flow. Communications of the
ACM, 7(20):504–513.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno,
T., Checkoway, S., McCoy, D., Kantor, B., Anderson,
D., Shacham, H., et al. (2010). Experimental security
analysis of a modern automobile. In Security and Pri-
vacy (SP), 2010 IEEE Symposium on, pages 447–462.
IEEE.
Leino, K. and Joshi., R. (1998). A semantic approach to se-
cure information flow. In Proc. 4th International Con-
ference, Mathematics of Program Construction, LNCS
1422, pages 254–271. Springer Verlag.
Lemke, K., Paar, C., and Wolf, M. (2006). Embedded secu-
rity in cars. Springer.
MathWorks (a). Generate autosar-compliant
code for multiple runnable entities
(https://it.mathworks.com/help/ecoder/examples/
autosar-code-generation-for-multiple-runnable-
entities.html).
Nielson, F., Nielson, H. R., and Hankin, C. (2005). Princi-
ples of Program Analysis. Springer.
Sabelfeld, A. and Mayers, A. (2003). Language-based
information-flow security. IEEE journal on selected
areas in communications, 21(1).
Stephan, W., Richter, S., and Muller, M. (2006). Aspects of
secure vehicle software flashing. In Embedded Secu-
rity in Cars, pages 17–26. Springer.
Volpano, D., Smith, G., and Irvine, C. (1992). A sound type
system for secure flow analysis. Journal of Computer
Security, 4(3):167–187.
Wyglinski, A. M., Huang, X., Padir, T., Lai, L., Eisenbarth,
T. R., and Venkatasubramanian, K. (2013). Security of
autonomous systems employing embedded computing
and sensors. Micro, IEEE, 33(1):80–86.
Verifying Data Secure Flow in AUTOSAR Models by Static Analysis
713
