
Adapting Signal Timings to Automated Incident Alarms within a
Self-organised Traffic Control System
Matthias Sommer and J
¨
org H
¨
ahner
Organic Computing Group, University of Augsburg, Eichleitner Str. 30, 86159 Augsburg, Germany
Keywords:
Congestion Detection, Road Traffic, Self-organisation, Organic Traffic Control.
Abstract:
Intersection management, routing, and congestion avoidance are key factors for improved mobility and better
road network utilisation. Organic Traffic Control (OTC) is a self-organising traffic management system for
urban road networks. Its main features are the self-adaptive traffic-responsive signalisation of intersections,
the coordination of traffic light controllers, and dynamic route guidance of traffic streams. This paper aims at
presenting how the automatic and fully distributed incident detection within OTC works and how OTC makes
use of these incident alarms for the automated adaptation of signalisation.
1 INTRODUCTION
The increase in mobility poses several challenges for
future transportation systems. Current research de-
als with optimisations related to mitigation of con-
gestion, improvement of throughput or reduction of
waiting times in front of red traffic lights. Traffic en-
gineers agree that recurrent congestion due to demand
exceeding capacity and poor signal timing account for
about half of the total delay experienced by motorists,
while non-recurrent congestion (due to road works,
incidents, and weather) makes up the other half (Ber-
tini, 2005). Especially in densely populated urban
areas, traffic volume and traffic performance are rai-
sing. The inefficient use of the existing infrastructure
demands for new and improved solutions. Simply ex-
panding the capacity of the road network is seldom
an option due to limited transportation funds and a
lack of public acceptance because of environmental
impacts. Furthermore, road safety and the crash fre-
quency are affected by the occurrence of congestion.
So far, most work has been limited to algorithms for
the detection of traffic congestion. Some of the instal-
led traffic management systems, such as SCOOT and
COMPASS, include modules for the detection of in-
cidents. However, none of them automatically adapts
their traffic control strategies to the incident alarms
raised. In this paper, we explore the benefits of an
autonomous adaptation of the control strategy to alle-
viate the negative effects of congestion.
In the context of the Organic Traffic Control
(OTC) project (Prothmann, 2011; Sommer et al.,
2016), a traffic-adaptive system has been developed
that utilises the existing road infrastructure. It reacts
to changes in the observed traffic conditions and self-
optimises its control strategies at runtime within pre-
defined behavioural corridors. We extend OTC with a
component for automated congestion detection within
urban areas. This paper presents approaches to utilise
the incident alarms raised by this component for the
self-adaptive adaptation of signalisation. By automa-
tically adjusting the signal settings, vehicles can be
discouraged from entering the congested area and the
efficiency of the road network can be improved.
The remainder of this paper is structured as fol-
lows: First, we present some installed traffic control
systems and how they deal with congestion manage-
ment. Afterwards, we introduce the self-organised
traffic management system Organic Traffic Control
(OTC). We move on, presenting our proposal for the
automatic adaptation of signalisation due to incident
alarms. Finally, we evaluate this approach based on a
simulation study.
2 RELATED WORK
Reliable incident detection mechanisms and fast cle-
arance are important for mitigating the negative ef-
fects of incidents and congestion. (Ozbay and Ka-
chroo, 1999) define incident detection as “the process
of identifying the spatial and temporal coordinates of
an incident”. It is executed by automatic algorithms
Sommer, M. and Hähner, J.
Adapting Signal Timings to Automated Incident Alarms within a Self-organised Traffic Control System.
DOI: 10.5220/0006295602030210
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 203-210
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
203

or by manual evaluation. Figure 1 depicts the inci-
dent management process (Deniz et al., 2012). First,
data from surveillance systems (e.g. CCTV cameras
or loop detectors) provide a description of the traf-
fic condition. Second, this data is usually sent to a
central control centre where it is processed. The data
analysis is often executed by automated incident de-
tection algorithms. Third, the incident alarm can be
verified by an operator, e.g. via surveillance cameras.
Fourth, the edited information has to be dissemina-
ted among the traffic participants. The actual conge-
stion management is usually done by traffic experts.
Its strategies range from adaptation of signal plans, to
re-routing of traffic by means of route recommendati-
ons via variable message signs, and radio broadcasts.
Finally, clearance procedures are initiated to restore
the undisturbed conditions as before the incident.
Comprehensive reviews over incident detection
algorithms and detector technology are given by (Par-
kany and Xie, 2005) and (Mahmassani et al., 1999).
The family of point-based algorithms is usually de-
ployed on freeways (Yang et al., 2004). Spatial
measurement-based algorithms make use of CCTV
cameras and image processing algorithms and are also
used in urban traffic networks (Zhang and Xue, 2010).
Congestion patterns are detected based on temporal
and spatial differences of traffic parameters monito-
red by traffic sensors.
Data
collection
VerificationDetection
Response
Information
dissemination
Clearance
Incident
No incident
Figure 1: Typical flow chart of an AID system. The verifi-
cation step is optional.
The traffic management system SCOOT raises cy-
cle times and green times according to increased con-
gestion (Bretherton et al., 2000). SCOOT includes
modules to automatically identify critical links cau-
sing congestion, to target regularly recurring conges-
tion, and to propose the recommended action to take.
However, the actual execution is done by a traffic ex-
port. SCOOT assumes the presence of congestion
when the detector related to an upstream intersection
of the respective road monitors a stationary queue.
COMPASS (Masters and Wong, 1991) relies on
sensor technology to monitor the traffic conditions,
software to analyse these conditions, and further plans
defining which actions to take. All information is gat-
hered in a central traffic operation centre. The in-
cident detection is executed by the all purpose inci-
dent detection (APID) algorithm which is based on
a binary decision tree. Further management actions
during incident situations have to be executed by hu-
mans.
SCATS (Sims and Dobinson, 1980) is equipped
with a centralised unusual congestion server which
receives updates of the monitored traffic data in real
time. It generates alerts in case a road is classified as
congested by its monitoring tool. Again, counterme-
asures have to be taken manually by traffic experts.
In contrast to these traffic control systems, we
go one step further, proposing a self-adaptive traffic
management process, automatically detecting and re-
acting to congestion. The AID component of OTC
is fully distributed and completely autonomous. It is
responsible for the detection of incidents and the auto-
mated incident management. At each signalised inter-
section, an AID component extends the standard OTC
controller. The controller receives traffic data from
nearby sensors describing the traffic states at nearby
sections. This data is then used by an automatic inci-
dent detection algorithm to classify the current traffic
conditions into incident-free or congested. In case,
the selected algorithm classifies the current situation
as congested, OTC will react with an adaptation of
its control strategy. This adaptation can incorporate a
modification of the signalisation in terms of green ti-
mes and cycle time, calculating new route recommen-
dations, or triggering the adaptive progressive signal
system mechanism.
3 ORGANIC TRAFFIC CONTROL
Current traffic management systems usually rely on
fixed-time signal plans. Thus, they are not able to
adapt to the highly dynamic traffic patterns and to re-
act to unforeseen situations, leading to longer travel
times and higher emissions. OTC (Prothmann et al.,
2011) is a self-organised intelligent traffic manage-
ment system extending standard parametrisable traf-
fic light controllers (TLC). OTC consists of several
components: a) adaptive control of traffic lights, b)
traffic-dependent establishment of progressive signal
systems, c) dynamic route guidance, d) forecasting of
traffic situations, and e) automatic incident detection.
3.1 Adaptive Control of Traffic Lights
OTC handles the adaptation of green times of traffic
lights at intersections according to the present traffic
conditions. The self-learning, self-optimising system
follows a safety-oriented concept that allows OTC to
adapt within certain controlled boundaries. Each indi-
vidual instance of OTC is fully decentralised and con-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
204

trols one signalised intersection only. Fig. 2 depicts
the multi-layered observer/controller architecture as
applied to traffic control.
Layer 3
Layer 0
Detector
data
Control
signals
User
Traffic Light Controller (TLC)
Layer 1
Parameter selection
Observer
Controller
Learning
Component
Layer 2
Offline learning
Observer
Controller
Simulator
Opt. heuristic
Collaboration mechanism
Monitoring Goal Mgmt.
Figure 2: Multi-layered observer/controller architecture of
an OTC-controlled TLC.
Layer 0 is a parametrisable fixed-time TLC. It of-
fers interfaces for monitoring of sensor data and adap-
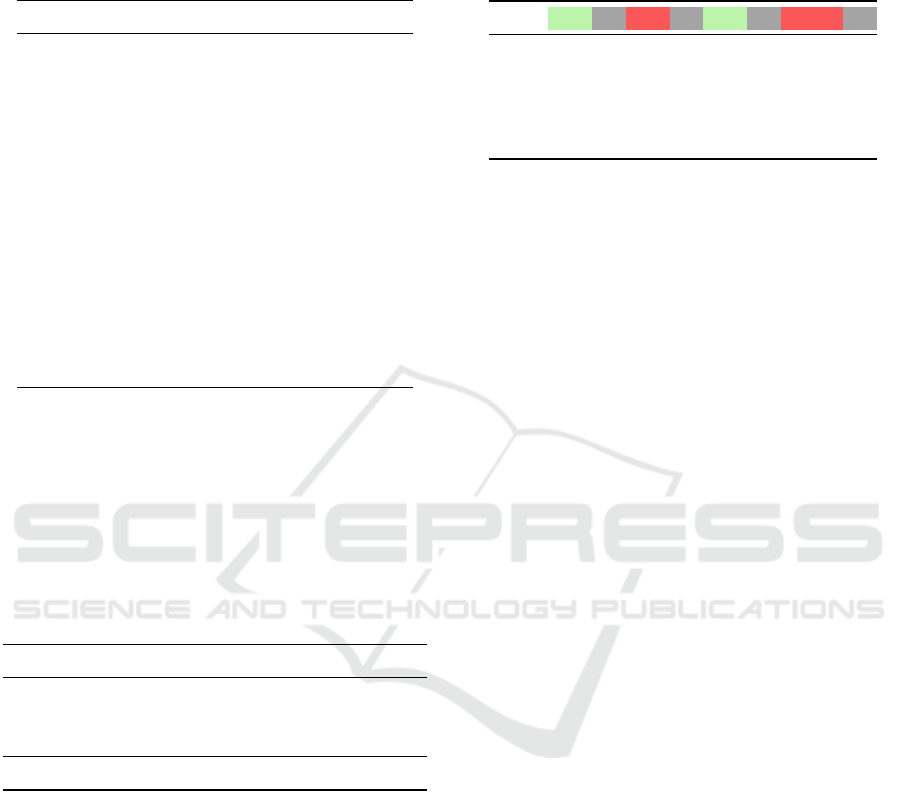
tation of signal plans. Figure 3 depicts a exemplary
signal plan with six phases (phase 3 and 5 being in-
terphases with all signals showing red light), and three
signals. Each green phase is followed by three se-
conds of yellow light.
Figure 3: Example of a signal plan with a cycle time of 90
seconds and three signals. The duration of yellow light is
three seconds.
The observer at Layer 1 retrieves raw data from
the TLC which is processed in the following (e.g.
filter noise or generate forecasts). This component
provides a situation description of the traffic flow of
the intersection for the corresponding controller on
Layer 1. This controller is represented by a learning
classifier system with a database of rules (signal plans
matched to traffic conditions). Matching signal plans
are selected based on the current traffic conditions at
the intersection and actuated on Layer 0. Before a
new signal plan is added to the rule base, it is simula-
ted and evaluated based on an optimisation heuristic
at Layer 2. The simulator is configured with the to-
pology of the intersection and the current traffic situ-
ation. It evaluates several signalisation plans with the
help of an evolutionary algorithm. The signal plan
providing the lowest estimated average delay is retur-
ned to Layer 1. As these simulations tend to be time-
consuming, Layer 2 acts in parallel to Layer 1. At last,
Layer 3 provides interfaces for monitoring and goal
management. For further details on OTC and a more
detailed description of the process, the interested re-
ader is referred to (Sommer et al., 2016; Prothmann,
2011).
3.2 Automatic Urban Incident Detection
The standard OTC is extended by an additional mo-
dule for the real-time automatic incident detection,
designed for application in urban areas. Based on lo-
cally monitored detector data, each TLC is enabled to
detect nearby congestion. Incidents can occur due to
accidents, lane closures, or long-lasting road works.
Figure 4 depicts the architectural prerequisites for the
installation. First, at least two detector stations are
needed that monitor the upstream and downstream
traffic conditions on a section (here called link). Se-
cond, these detector stations belonging to each other
are logically coupled as detector pairs, defining a mo-
nitoring zone. Each zone can be assigned with a diffe-
rent automatic incident detection (AID) algorithm. A
monitoring zone can also cover additional branching
sections via divided detector stations which allows for
the detection of more complex congestion patterns.
Thereby, the complex patterns created by incoming
and outgoing traffic streams are taken account of. Fi-
nally, a detection algorithm is assigned to each mo-
nitoring zone. OTC demands no specialised AID al-
gorithm and the applied algorithm and its parametri-
sation can be different for each zone. The applicable
algorithms can range from simple heuristics to sophi-
sticated machine learning techniques.
Monitoring
Zone
Section
Divided
detectors
Intersection
Detector
station
Detector
Detector
pair
Figure 4: Architectural prerequisites for the AID framework
within OTC.
Adapting Signal Timings to Automated Incident Alarms within a Self-organised Traffic Control System
205
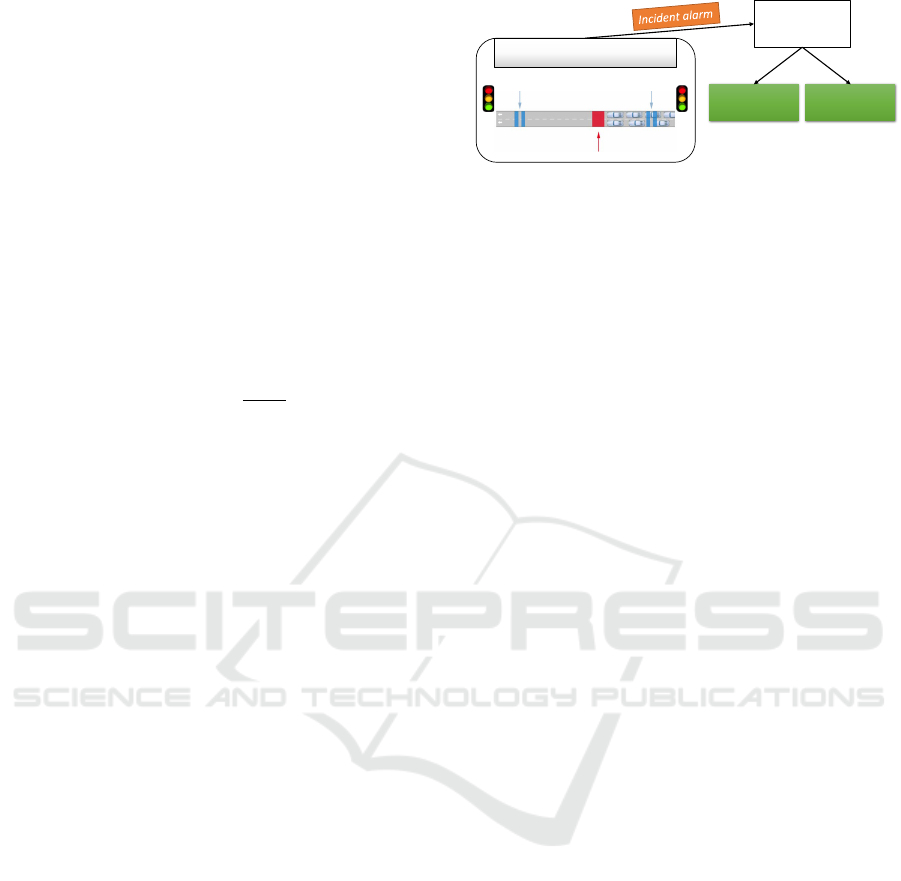
Figure 5 depicts the standard process in case of an
incident alarm. First, an alarm is raised by an AID
algorithm responsible for the according monitoring
zone. Next, the alarm is passed-on to the disturbance
manager. A disturbance is defined by the correspon-
ding incident causing the disturbance, its start time,
its end time, its severity, and its exact location. The
disturbance manager automatically estimates the se-
verity of the incident by using sensor data from traffic
detectors and approximation heuristics. Here, we use
the average speed sp and the average detector occu-
pancy occ as measures for the congestion level of the
section. Based on these two characteristics the seve-
rity of a section can be estimated by
severity = sev
sp
∗ sev
occ
(1)
with
sev
sp
= 1 − min(1,
∑
d
i
v
i
d
i
/v
max
) (2)
and
sev
occ
= min(1,max(occ
i
)/100) (3)
where v
max
is the speed limit, d
i
denotes the detector
station on the section, where v
i
resembles the speed
monitored by d
i
, respectively occ
i
the occupancy of
d
i
over a certain time span. Therefore, this factor lies
between 0 and 1 whereas 1 denotes the highest se-
verity. The severity factor then serves as additional
parameter for the adaptation of green times at the sig-
nalised intersection and as a penalty factor within the
travel time estimation on the congested section. An
AID algorithm can take several states:
• Incident free: traffic is free flowing.
• Tentative incident: congestion is assumed, but no
incident alarm is raised yet.
• Incident confirmed: The tentative incident was
confirmed by a subsequent test. An incident alarm
is raised.
• Incident continuing: the detected congestion is
still present.
Depending on the chosen AID algorithm, there can
be additional states. To reduce the number of false
alarms, an additional verification step by a traffic en-
gineer can be executed (i.e. by examining live feeds
from CCTV cameras).
4 AUTOMATIC ADAPTATION OF
SIGNAL PLANS BASED ON
INCIDENT ALARMS
To alleviate the negative effect of congestion, traffic
streams have to be relocated to other streets, decrea-
sing the traffic flow near the problematic area. This
AID: Monitoring zone
Disturbance
Manager
TLC green time
adaptation
Route cost
adaptation
Downstream
detector
Upstream
detector
Incident
Figure 5: Automatic reaction process to a detected incident
within OTC.
can be achieved by reducing the green times of traf-
fic lights entering the congested road or by increasing
green times at outgoing sections. The automatic adap-
tation of green times involves the following steps:
1. Localize the exact location of the incident.
2. Determine the signal groups {sg} of the incoming
turnings affecting the congested road. The green
time of the phases in {sg} will be reduced in the
following. Mark all other phases {p} for exten-
sion of their green times.
3. Filter out interphases and phases in {sg} with
green times below the minimal green period.
4. Calculate the available amount of green time re-
duction of the phases left in {sg}.
5. Shorten the green times of the phases in {sg}.
6. Equally increase the green time of the signal pha-
ses in {p}.
Note, that this algorithm ensures that the signal
plans cycle time stays the same as before. However,
it can be easily adjusted to extend the cycle time, e.g.
by giving more green time to signal groups not be-
longing to the congested road. The phase lengths are
always in whole numbers. Furthermore, no conflicts
between different signal phases are created, since the
relationship between phases and signal groups stays
unchanged. The interphases stay the same in terms
of their duration, and in terms of their position within
the signal plan. According to the German handbook
for traffic control (RILSA) (Forschungsgesellschaft
f
¨
ur Strassen- und Verkehrswesen, 2010), the minimal
duration for phases is five seconds. Therefore, phases
with green times less or equal to this duration are not
further shortened.
For n phases p (excluding interphases), the maxi-
mal amount of green time reduction is calculated as
t
change
= bλ ∗
n
∑
i=1
t
shorten
[i]c (4)
where t
shorten
[i] is calculated as
t
shorten
[i] =
(
p
GT
[i] −t
red
if p can be shortened
0 otherwise
(5)
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
206
To control the extend of the algorithm, a green time
reduction factor λ defines how much green time can
be transferred from the shortened phases to other pha-
ses. Additionally, an adaptation threshold t
red
can de-
fine the maximal absolute allowed change of green
time (e.g. 5 seconds). In case that t
change
= 0 (no green
time reduction possible) or that the number of phases
that can be extended is zero, the algorithms terminates
and the active signal plan stays unchanged. Of course,
this procedure can also applied in case there is more
than one congested section. The adapted signal plan
stays active as long as the applied AID algorithm con-
firms that the congestion is still ongoing. Afterwards,
the signal plan which was active before the change, is
restored.
5 EVALUATION
In the following, the evaluation scenario and the ex-
perimental results based on a real-world road network
are presented. We compare the results of a simulation
scenario with and without the adaptation of the signa-
lisation based on incident alarms.
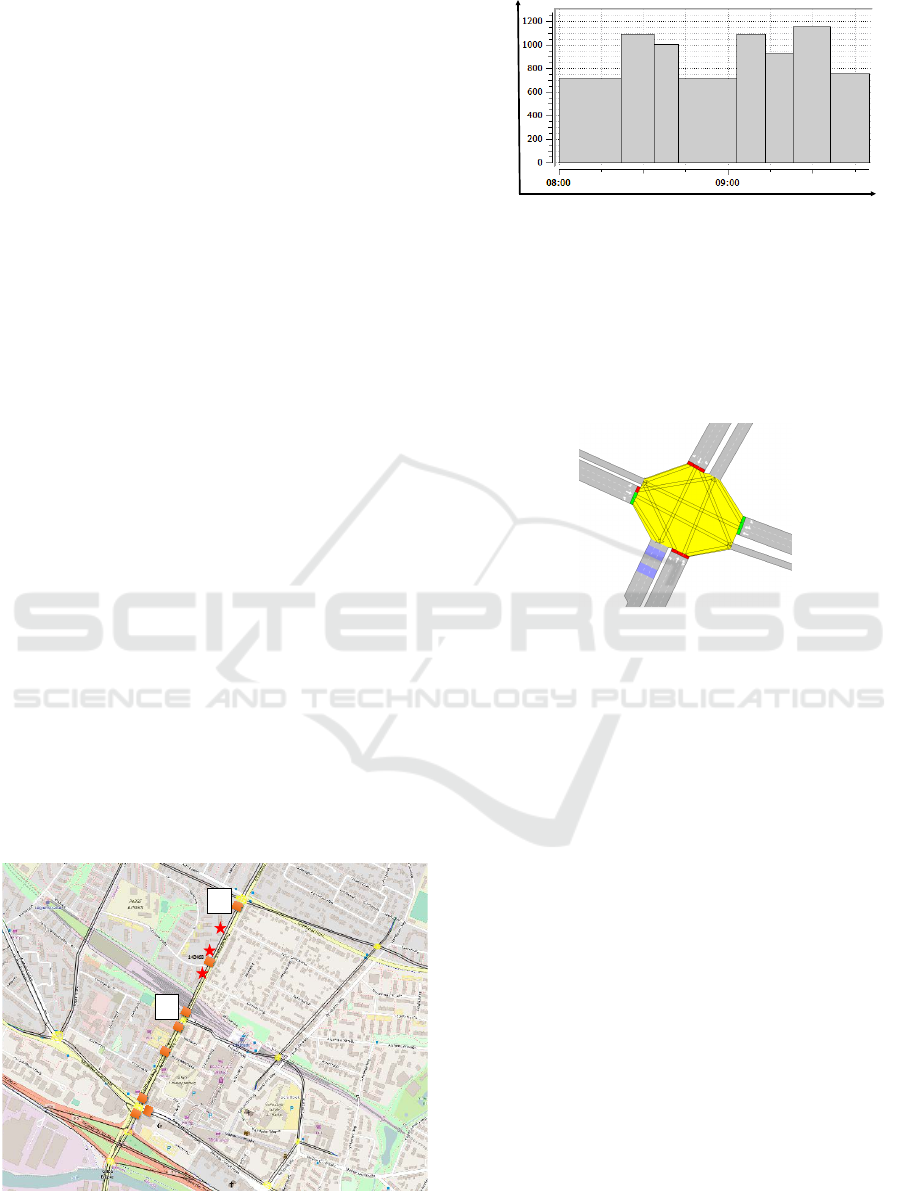
5.1 Simulation Study: Road Network
For further evaluation, we developed a simulation mo-
del in Aimsun of a real-world network with eleven in-
tersections located in Hamburg, Germany (Figure 6).
The evaluation was done with Aimsun 8 (Barcelo and
Casas, 2002), a professional traffic modelling and si-
mulation software widely used by traffic experts. The
simulation duration is two hours. Figure 7 depicts the
total number of trips throughout the simulation pe-
riod.
J6
J3
Figure 6: Aimsun simulation model of Billstedt at Ham-
burg, Germany. Stars highlight locations where incidents
are created, rectangles mark locations of detector stations.
Number of trips
Simulation time
Figure 7: The absolute number of trips throughout the si-
mulation period.
After 25, 55, and 85 minutes, an incident is cre-
ated on the section going from intersection J6 to J3.
Therefore, during incidents the signal plan at J6 (Fi-
gure 8) is changed in the way that less green time is
given to turnings going towards J3.
Figure 8: Simulation model of intersection J6.
As mentioned by (Deniz et al., 2012), the loca-
tion of the incident can influence the detection rate.
Thus, the incidents are located at three different lo-
cations within this monitoring zone. The incidents
block both lanes and last for fifteen minutes. De-
tector stations are installed approximately 10 meters
from the beginning, before the end, and in the middle
of this section. The signal changes and phase dura-
tions simulated within Aimsun are controlled exter-
nally by OTC. For the eleven signalised intersections,
the fixed-time signal plans have a common cycle time
of 90 seconds with two to four phases. The duration
for yellow light is two to three seconds. The simulati-
ons were executed on an Intel Core i7 quad-core CPU
with 2.6 GHz and 8 GB RAM.
5.2 Experimental Results
The following section presents the results of the eva-
luation executed as described before. For the incident
detection part, we select the all purpose incident de-
tection algorithm (APID) (Masters and Wong, 1991),
a well-established algorithm. We follow the algorithm
configurations given by (Deniz et al., 2012) (see Ta-
ble 1). Every second, APID receives its input from
traffic detectors simulated by Aimsun. The traffic data
Adapting Signal Timings to Automated Incident Alarms within a Self-organised Traffic Control System
207
(speed and occupancy values) is then averaged over a
period equal to the execution interval.
Table 1: Parameters settings of the APID algorithm.
Control parameter Value
Compression wave test enabled
Persistence test enabled
Medium traffic incident detection enabled
Compression wave test period 300 sec.
Persistence test period 300 sec.
Medium traffic flow threshold 60
Incident clearance threshold -0.4
Persistence test threshold 0.1
Compression wave test threshold 1 -1.3
Compression wave test threshold 2 -1.5
Incident detection threshold 1 10.2
Incident detection threshold 2 0
Incident detection threshold 3 20.8
Medium traffic incident threshold 1 0.4
Medium traffic incident threshold 2 0.1
Initially, we evaluate different execution intervals
of 30, 60, and 120 seconds. The according results
are given in Table 2. Interestingly, an execution in-
terval of 120 seconds results in a low ATTD, however
APID did not recognize the second congestion. As an
execution interval of 30 seconds results in the lowest
ATTD, we use this value for our next experiments.
Table 2: Average time to detection (ATTD) in seconds for
execution intervals of 30, 60, and 120 seconds.
Start - End 30 60 120
25 - 40 32m 40s 33m 20s 32m 0s
55 - 75 63m 20s 62m 40s not detected
85 - 100 91m 20s 96m 0s 93m 20s
ATTD 7m 27s 9m 0s -
To evaluate the adaptation strategy of OTC consi-
dering congestion alarms, we took a deeper look into
the signal plans created. Table 3 summarises the adap-
ted green times for different values of λ. Again, λ = 0
displays the standard OTC strategy. For λ = 1, the cy-
cle time is slightly increased by three seconds as the
reduction of phase 7 would have resulted in a value
below the minimal allowed green time. Therefore, it
was set to the minimal duration of five seconds.
In the following, we compare our adaptation stra-
tegy of the signal timings against the standard OTC
system running a fixed-time signalisation plan as in-
troduced in Section 3. Each approach is evaluated ba-
sed on following performance criteria:
• The total travel times for the complete network in
Table 3: Intersection’s J6 adapted green times in seconds
for λ = {0,0.25, 0.5,0.75,1}. Interphases are highlighted
in grey, shortened phases in red, extended phases in green.
The duration of yellow light is three seconds.
λ 1 2 3 4 5 6 7 8
0 10 4 30 4 10 4 24 4
0.25 15 4 25 4 15 4 19 4
0.5 21 4 19 4 21 4 13 4
0.75 26 4 14 4 26 4 8 4
1 32 4 8 4 32 4 5 (2) 4
seconds per kilometre,
• the average delay times (e.g. due to red traffic lig-
hts) in seconds per kilometre,
• the average stop time for the complete network in
seconds per kilometre,
• and the vehicle’s emissions: carbon dioxide (CO
2
)
and fuel consumption.
The emission of these pollutants has been estima-
ted with the help of Aimsun’s internal microscopic
pollution emission model which is based on (Panis
et al., 2006). The final results of the simulation runs
are given in Table 4. A value of λ = 0 resembles the
standard OTC behaviour. Compared to the standard
OTC, the incident-adaptive OTC-control significantly
reduces the evaluated traffic performance measures.
Reacting to automatic incident alarms has the poten-
tial to reduce important traffic parameters, such as the
average delay time and the average stop time at red
lights. Independent of the value of λ, the results of
the evaluated measure showed an improvement. On
the one hand, the average stop time and the average
travel time is reduced more for a smaller λ. On the
other hand, the pollution emissions due to CO2 and
the fuel consumption can be reduced more for higher
values of λ.
Tentative Incident Alarms
APID only raises an incident alarm in case two
successive executions result in congested classificati-
ons (so-called persistence check). An incident which
is not yet confirmed is called tentative incident (TI).
On the one hand, this additional confirmation lowers
the number of false alarm. On the other hand, the
ATTD is increased. In case the AID algorithm is exe-
cuted every 30 seconds, the adaptation of the signal
plan can be executed 30 seconds earlier when also
considering TIs. In the following, we evaluate to what
extend the consideration of TIs affects the experimen-
tal results.
In contrast to what we expected, the reaction to
TIs does not necessarily improve the overall perfor-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
208

Table 4: Experimental results for different values of λ with a execution interval of 30 seconds. λ = 0 resembles the standard
OTC behaviour. Best results highlighted in bold.
λ 0 0.25 0.5 0.75 1.0
Total CO2 emissions [kg] 4875 4798 4820 4821 4753
Total fuel consumption [l] 1930 1931 1923 1923 1906
Avg. stop time [sec/km] 88.2 85.0 87.1 87.2 92.2
Total travel time [h] 701.3 694.9 698.9 699.1 700.5
Table 5: Experimental results using an execution interval of
30 seconds, also considering tentative incidents (TI).
λ 0.75 0.25
Total CO2 emissions [kg] 4860 4824
Total fuel consumption [l] 1940 1937
Avg. stop time [sec/km] 90.9 84.8
Total travel time [h] 718.3 693.9
mance. For λ = 0.25, the results were actually better
than without TIs. However, for λ = 0.75, the experi-
ment showed that the evaluated measures were worse
than before. This effect is caused by the high num-
ber of TIs which are raised without leading to actual
congestion alarms. These false tentative alarms du-
ring uncongested conditions can lead to a suboptimal
signalisation.
Increasing the Cycle Time
Next, we evaluate the effect when we additionally al-
low OTC to extend the cycle time (without conside-
ring TIs). This can be done by extending the previ-
ous cycle time by a fixed offset. However, we want
to evaluate the performance when we allow OTC to
dynamically extend the cycle time in dependence of
the severity of the disturbance as estimated by Equa-
tion 1:
t
new
= t
old
+ 10s ∗ severity (6)
Therefore, the maximal cycle time extension is 10 se-
conds. Table 6 presents the according results. The
increased cycle time resulted for all values of λ in
a reduction of the average stop time. However, for
extreme values, such λ = 0.25 and λ = 1, the evalua-
tion showed no improvement or slightly worse results.
However, for λ = 0.5 and λ = 0.75, this approach also
reduced CO2 emissions and the total travel time.
6 CONCLUSION
In terms of congested conditions, real-world traf-
fic control systems only propose which actions to
take, but do not take countermeasures by themselves.
Within this paper, we extend the self-organised traffic
management system Organic Traffic Control (OTC)
by means of congestion detection within urban net-
works. Based on this architecture, we proposed a
method for the automatic detection of congestion and
the automatic adaptation of signal plans due to inci-
dent alarms. Compared to the standard OTC system,
the automatic adaptation of signal plans can mitigate
the negative effect of congestion. Based on the re-
sults of a simulation scenario of a real-world network,
our findings show that this approach significantly lo-
wers important traffic parameters, such as the average
delay time or the average amount of pollution emis-
sion. This reduction is achieved by re-routeing vehi-
cles over alternative routes. Usually, these alterna-
tives are longer in distance, which consequently can
result in slightly higher travel times for some moto-
rists. Furthermore, our experiments showed that the
dynamic, automatic extension of the cycle time has
the potential to further reduce the total travel time and
the average stop time at red lights. Even if the pri-
mary objectives are not related to energy efficiency
and reducing CO2 emissions, the implemented mea-
sures still have a positive impact on pollution emissi-
ons.
ACKNOWLEDGEMENT
The author would like to thank Florian Leinsinger for
his contribution in the scope of his bachelor’s thesis.
REFERENCES
Barcelo, J. and Casas, J. (2002). Dynamic network simu-
lation with AIMSUN. In Proc. of the Int. Symp. on
Transport Simulation, pages 1 – 25. Kluwer.
Bertini, R. L. (2005). You are the traffic jam: An exa-
mination of congestion measures. Technical report,
Department of Civil and Environmental Engineering,
Portland State University.
Bretherton, D., UK, T. R. L., Wood, K., Baker, K., and Ra-
dia, B. (2000). Congestion and incident management
using the SCOOT utc system. 10. Int. Conf. on Road
Transport Information and Control, (472):96–100.
Adapting Signal Timings to Automated Incident Alarms within a Self-organised Traffic Control System
209

Table 6: Experimental results for different values of λ and a execution interval of 30 seconds considering cycle time extension.
Best results highlighted in bold.
λ 0 0.25 0.5 0.75 1.0
Total CO2 emissions [kg] 4875 4792 4836 4795 4846
Total fuel consumption [l] 1930 1939 1918 1930 1961
Avg. stop time [sec/km] 88.2 84.8 86.9 85.9 89.4
Total travel time [h] 701.3 698.1 696.2 697.9 713.3
Deniz, O., Celikoglu, H. B., and Gurcanli, G. E. (2012).
Overview to some incident detection algorithms: A
comparative evaluation with istanbul freeway data.
Proc. of 12th Int. Conf. Reliability and Statistics in
Transportation and Communication, pages 274–284.
Forschungsgesellschaft f
¨
ur Strassen- und Verkehrswesen
(2010). Richtlinien f
¨
ur Lichtsignalanlagen: RiLSA;
Lichtzeichenanlagen f
¨
ur den Straßenverkehr. FGSV
Verlag.
Mahmassani, H. S., Haas, C., Zhou, S., and Peterman, J.
(1999). Evaluation of incident detection methodolo-
gies. Technical report, Center for Transportation Re-
search, University of Texas.
Masters, H., L. K. and Wong, K. (1991). Incident detection
algorithms for compass: An advanced traffic mana-
gement system. In Proc. of Vehicle Navigation and
Information Systems, volume 2, pages 295–310.
Ozbay, K. and Kachroo, P. (1999). Incident Management in
Intelligent Transportation Systems. Artech House ITS
library. Artech House.
Panis, L. I., Broekx, S., and Liu, R. (2006). Modelling in-
stantaneous traffic emission and the influence of traf-
fic speed limits. Science of The Total Environment,
371(1-3):270–285.
Parkany, E. and Xie, P. C. (2005). A complete review of in-
cident detection algorithms & their deployment: What
works and what doesn’t. Technical report, Fall River,
MA: New England Transp. Consortium.
Prothmann, H. (2011). Organic Traffic Control. KIT Scien-
tific Publishing.
Prothmann, H., Tomforde, S., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2011). Orga-
nic Traffic Control. In M
¨
uller-Schloer, C., Schmeck,
H., and Ungerer, T., editors, Organic Computing – A
Paradigm Shift for Complex Systems, chapter 5.1, pa-
ges 431–446. Birkh
¨
auser Verlag.
Sims, A. G. and Dobinson, K. W. (1980). The Sydney coor-
dinated adaptive traffic (SCAT) system – Philosophy
and benefits. IEEE Transactions on Vehicular Techno-
logy, 29(2):130–137.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016). An Or-
ganic Computing Approach to Resilient Traffic Mana-
gement, chapter An Organic Computing Approach to
Resilient Traffic Management, pages 113–130. Sprin-
ger International Publishing.
Yang, X., Sun, Z., and Sun, Y. (2004). A freeway traffic in-
cident detection algorithm based on neural networks.
In Yin, F.-L., Wang, J., and Guo, C., editors, Advan-
ces in Neural Networks - ISNN 2004, volume 3174 of
LNCS, pages 912–919. Springer.
Zhang, K. and Xue, G. (2010). A real-time urban traffic de-
tection algorithm based on spatio-temporal OD matrix
in vehicular sensor network. Wireless Sensor Network,
2(9):668–674.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
210
