
Detection and Classification of Holes in Point Clouds
Nader H. Aldeeb and Olaf Hellwich
Computer Vision and Remote Sensing, Technische Universität Berlin, Berlin, Germany
nader.h.aldeeb@gmail.com, olaf.hellwich@tu-berlin.de
Keywords: Point Cloud, Hole Detection, Hole Classification, Hole Filling, Surface Reconstruction, Textureless
Surfaces, Segmentation with Graph Cuts.
Abstract: Structure from Motion (SfM) is the most popular technique behind 3D image reconstruction. It is mainly
based on matching features between multiple views of the target object. Therefore, it gives good results only
if the target object has enough texture on its surface. If not, virtual holes are caused in the estimated models.
But, not all holes that appear in the estimated model are virtual, i.e. correspond to a failure of the
reconstruction. There could be a real physical hole in the structure of the target object being reconstructed.
This presents ambiguity when applying a hole-filling algorithm. That is, which hole should be filled and
which must be left as it is. In this paper, we first propose a simple approach for the detection of holes in
point sets. Then we investigate two different measures for automatic classification of these detected holes in
point sets. According to our knowledge, hole-classification has not been addressed beforehand. Experiments
showed that all holes in 3D models are accurately identified and classified.
1 INTRODUCTION
Generating accurate 3D image reconstruction has
found its application in a wide variety of fields, such
as computer aided geometric design, computer
graphics, virtual reality, computer vision, medical
imaging, human computer interaction, computer
animation, and robotics. Because of the availability
of relatively cheap sensors, surface reconstruction
has gained considerable interest (Zaman et al.,
2016). Nowadays, many simple applications that are
based on Structure from Motion (SfM) allow users
to create own high-quality 3D models on their
smart-phones not requiring any experience or
specific knowledge regarding that technique
(Muratov et al., 2016). SfM is based on matching
correspondences between multiple views of the
target object. That matching is based on
correspondence establishing of features such as
corner points (edges with gradients in multiple
directions) from one image to the other. Therefore,
feature detection is highly needed in SfM. One of
the most widely used feature detectors is the Scale-
Invariant Feature Transform (SIFT) (Lindeberg,
2012). Unfortunately, the performance of the SIFT
algorithm over texture-less surfaces is poor, because
no feature point can be detected in such surfaces
(Alismail et al., 2016). Consequently, SfM technique
fails to estimate 3D information in regions having
weak texture information, where no matching points
can be found (Saponaro et al., 2014). That is the
reason why most of the popular 3D reconstruction
techniques give good results only if the target object
has enough texture on its surface. If not, virtual
holes appear in the estimated models. For this kind
of low-textured objects, laser scanners are frequently
used instead of the traditional image based 3D
reconstruction techniques. But, holes may also
appear in the resulting models due to surface
reflectance, occlusions, and accessibility limitations
(Wang et al., 2007).
These days, having a high-quality reconstruction
of objects is an essential demand by many
applications. Therefore, hole-filling or surface
completion has become an important component in
3D image reconstruction process. But, no hole filling
can be applied without the detection of holes in point
clouds. So, hole-detection in point sets is also an
important component in that process. Usually, 3D
image reconstruction methods produce unstructured
point clouds. That is, there is no explicit
connectivity information encoding the surface of the
object. This makes the problem of the detection of
holes on the surface an ill-defined problem (Bendels
et al, 2006).
It is worth mentioning that not all holes
appearing in the estimated model are virtual, i.e. due
to missing reconstructions of featureless surfaces.
Aldeeb N. and Hellwich O.
Detection and Classification of Holes in Point Clouds.
DOI: 10.5220/0006296503210330
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 321-330
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
321

Some of the holes may also represent a real physical
hole, which is part of the structure of the object
being reconstructed. Unfortunately, just looking at
the point cloud, it is almost impossible to
differentiate between these two types of holes (real
and virtual). Particularly, when there is a real
physical hole in the structure of the target object
having uniformly distributed inner-color or inner-
details not appearing in the 2D views, this kind of
regions will appear as regions missing depths in the
estimated model. These are real holes that should be
left as they are during the filling process.
The ambiguity in differentiating between real
and virtual holes is a significant problem, which is
usually faced when running a hole-filling algorithm.
Thus, analysing each of the detected holes and
classifying them to either real or virtual hole is a
very important component in hole-filling process.
Finally, it is now clear that the problem of hole-
filling in point clouds requires two tasks. First,
identifying the holes, and then classifying them. By
classification, the necessity of filling the identified
hole can be determined. Unfortunately, both tasks
are nontrivial. But in this paper, we propose a simple
approach which will contribute to the accurate
detection and classification of holes in point clouds,
and consequently support systems for surface
reconstruction and hole filling.
The rest of this paper is organized as follows:
section 2 presents a brief background and lists the
related work. Section 3 discusses the proposed
approach. Experimental results and discussion can
be found in section 4. Finally, section 5 concludes
with a conclusion, perspectives, and future work.
2 BACKGROUND AND RELATED
WORK
Structure from Motion (SfM) techniques have
attracted researchers since the work of (Tomasi and
Kanade, 1992). SfM algorithm involves finding
correspondences between different input images for
the object being reconstructed, and then estimates a
3D model and a set of camera parameters.
Therefore, reconstructing regions having low
textures is challenging for most of SfM-based
approaches.
As mentioned before, the need for accurate 3D
models makes hole-filling a very important problem.
For a successful hole-filling, accurate detection and
classification of holes in point clouds are needed.
According to our knowledge, and after an intensive
review of the literature, not much work has been
published about detecting holes in point clouds.
Nevertheless, some methods employed either special
equipment or triangular meshes, sometimes
associated with some input entered manually by
users for hole-identification. For example, in (Noble
et al., 1998), the internal geometry feature of 3D
objects is measured by employing an X-ray
inspection method; thereby they were able to
position the drilled holes on the object's surface. In
(Kong et al., 2010), a hole-boundary identification
algorithm for 3D closed triangle mesh is presented.
In this method, the user has to interactively select
the region of interest by mouse dragging. From our
point of view, this method has one more drawback
besides the need for manual inputs. Dependence on
meshes instead of point clouds will not guarantee the
detection of all holes, because some meshing
algorithms may fill the regions of missing depth.
Consequently, this prevents distinguishing real from
virtual holes.
The authors of (Wang et al., 2012) proposed a
method which aims to find solid holes inside 3D
models. This method is also based on triangular
mesh models. By grouping interconnected coplanar
triangles, they extract the contour of the model using
the boundaries of the adjacent planes. Then, based
on the extracted contour, they form several disjoint
clusters of model vertices. Finally, by analysing the
relationship between the clusters and planes, holes
are identified. But, this method only finds solid
holes inside models, and does not detect regions of
missing depths.
The main goal of (Wang et al., 2007) is filling
holes in locally smooth surfaces. But, as a pre-
processing step, holes are found based on the
triangular mesh of the input point cloud. In this
method, holes are identified automatically by
tracking boundary edges. If an edge belongs only to
a single triangle, then it is a boundary edge,
otherwise it is a shared edge, which shares more
than one triangle. But, employing this strategy in
finding holes will detect all holes including the real
holes those need not be filled. Therefore, in this
work, user input is required as an assistance. So,
again, manual user inputs are needed in this work.
An automatic hole-detection approach has been
presented in (Bendels et al., 2006). Properties of
point sets have been investigated to derive several
criteria which are then combined into an integrated
boundary probability for each point. This method
seems to be robust, but we have noticed that it has
some drawbacks. First, in their combination of
probability criteria, they used some weights, which
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
322

have to be set by the user according to visual
inspection. Second, they have a set of predefined
parameters, which limits the scalability of the
approach. For example, a predefined diameter is set
for the hole to be detected.
Some other approaches address a closely related
problem. For example, (Dey and Giesen, 2003)
present an approach for the detection of under-
sampled regions. The detection is guided using a
sampling requirement, which has been defined to
ensure a correct reconstruction of surfaces. For
example, for correct reconstruction, every point on
the surface should have at least one sample point
within a ball with a predefined size. But, according
to this definition, their method will not succeed in
detecting holes in planar regions, where this
requirement is mostly fulfilled by a little number of
samples.
3 THE PROPOSED ALGORITHM
Fig. 1 shows the flowchart of the proposed
algorithm. In the following subsections, each of the
main processes will be discussed in brief using
demonstration examples.
3.1 Input a Number of Views
The first step in the proposed algorithm requires a
number of input images. Because the technique
proposed in this paper uses stereo correspondences,
two calibrated images from different viewpoints for
the object being reconstructed are needed at least.
3.2 Bundle Adjustment
Bundle Adjustment is the process of jointly refining
a set of initial camera and structure parameter
estimates for finding the set of parameters, which
most accurately predict the locations of the observed
points in the set of available images (Alismail et al.,
2016). Assuming we have n 3D points that are seen
in m views, and the projection of the i
th
point into
view j is denoted by X
ij
, and let v
ij
be a binary
number equals 1 if the point i is visible in view j and
0 otherwise. Also, let a
j
denote the vector carrying
the parameters of camera j and b
i
is the vector
carrying the coordinates of the 3D point i. Then by
minimizing the following energy function, we get
the optimal projection matrix for each camera.
(1)
where, Q(a
j
,b
i
) denotes the predicted projection of
point i onto view j and d(x,y) denotes the Euclidean
distance between the image points x and y. In our
research, we used Bundler (Snavely et al., 2008;
Snavely et al., 2006) for getting the camera matrices.
Figure 1: Flowchart of the proposed approach, detection
and classification of holes in point clouds.
3.3 Reconstruction of the 3D Structure
Patch-based Multi-View Stereo (PMVS) software
(Furukawa and Ponce, 2010) has been employed to
reconstruct the 3D structure of objects visible in
images. According to our proposed approach, we
need to know the views in which the generated 3D
points are visible. One of the outputs generated by
PMVS is the PATCH file, which contains full
reconstruction information. That includes the
number of reconstructed 3D points, the 3D location,
the normal, and photometric consistency score for
each point. Also, it states the number of images in
which the point is visible as well as the actual image
indexes. That is the main reason for using PMVS in
our implementation.
Detection and Classification of Holes in Point Clouds
323
3.4 Generating Depth and Visibility
Maps
The goal of this research is to analyse the 3D
structure of objects appearing in images through
investigating the combination of the 3D structure
together with the features and details provided by
the images. Therefore, the goal of this process is to
relate the 3D information, which we got in the
previous process, with the 2D views (images).
In point clouds, each point can be denoted using
a homogeneous 3D coordinate as (x y z 1). Similarly,
the homogeneous 2D coordinate of its projection
into images can be denoted as (u v 1). From the
patch file, we know the view in which each of the
3D points is visible. Then, using the corresponding
camera matrix, P, we can relate each 3D-coordinate
to its 2D-coordinate by following (2), where d is the
depth of that point.
(2)
We can thus generate depth-maps for our object
based on all its views (images). Because images are
10 times down sampled, the value of each pixel in
that map is the average of the depth values of the
projected 3D points into that pixel location. If for a
given pixel no depth information is given, it is
assigned a depth equals
times the maximum
depth in the map (very far). Thereby, we guarantee
that the generated value is larger than the maximum
depth in the map. Here, it is worth mentioning that
values other than
can also be used. But the used
value has a direct effect in segmentation, as it will
become clear in section 3.5.2.
Also, exploiting the visibility information from
the PMVS's PATCH file, we can generate visibility-
maps, where each pixel is assigned a number which
equals the total number of 3D points which are
projected to that pixel location. This happens
because of the down sampling of images. Fig. 2
shows both maps for one view of the house model as
an example (see section 4 for more details about the
dataset). In the visibility-map, for demonstration, a
pixel is marked red if it has depth information in the
generated 3D structure and marked black otherwise.
(a)
(b)
(c)
Figure 2: Example depicting (a) original image, (b) depth-
map and (c) visibility-map.
Afterwards, we will use either of these maps to
identify the problematic regions, which have no
depth information, out of each image employing
graph cuts.
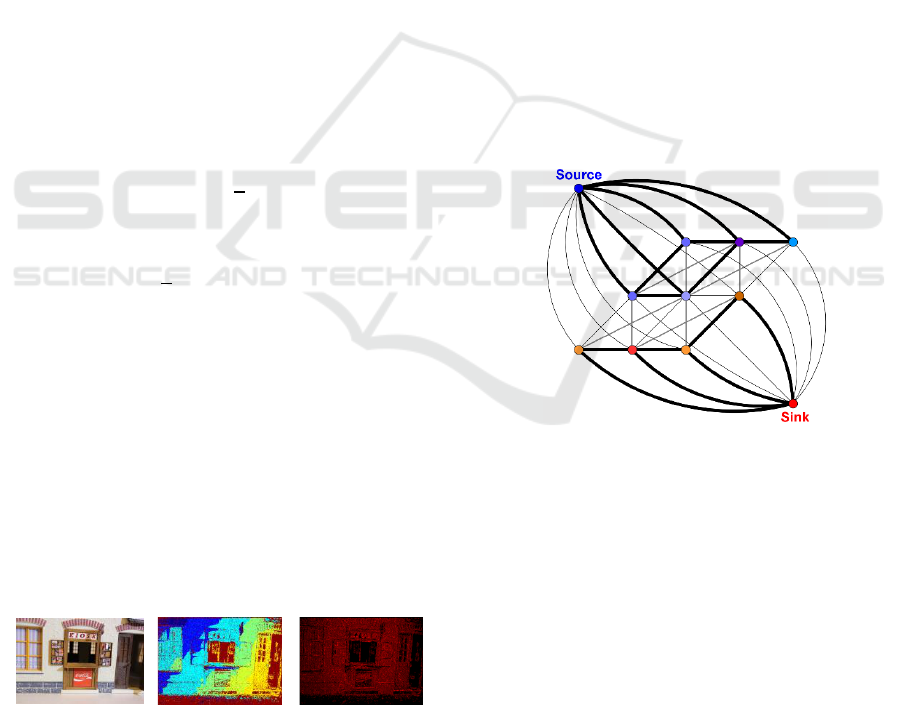
3.5 Segmentation using Graph Cuts
To take advantage of the competent solutions of
graph-based approaches for segmentation problems,
we built an s-t-graph (Boykov and Funka-Lea,
2006). The number of nodes in the graph equals to
the number of pixels in the input map. Two more
additional nodes, the source and the sink, represent
the segmentation labels. Each node in the graph is
connected to its 8-neighborhood nodes based on the
neighbourhood information of pixels. In addition,
each node is joined to the source and the sink using
two weights, which represents the likelihood of the
corresponding pixel to either of the segmentations
labels. Fig. 3 shows a sketch of the graph. For
accurate segmentation results, weights form
different types of regions must assure a large
difference. For reasons of comparison, weights are
selected based on the depth-maps one time and on
the visibility-maps at the other time.
Figure 3: Sketch of the graph and connectivity
(w3.impa.br/~faprada).
3.5.1 Supporting Graph Cut Segmentation
For supporting our graph-based segmentation,
before we set the weights for the graph, we estimate
another kind of segmentation, which gives an
indirect indication about the nature of pixels. That is,
whether they have depth information or not. Since
SfM techniques perform poorly in regions having
weak or no textures, we first detect these regions in
original images, then each pixel is classified to
belong either to a textured or texture-less region.
Finally, weights on graph edges are affected by
those classification results.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
324

According to (Scharstein and Szeliski, 2002),
texture-less regions are defined as regions where the
average of the squared horizontal gradient over a
predefined window is below some given threshold.
Using (3), we get the squared horizontal intensity
gradient for two neighbouring pixels. It is calculated
over the three color-channels, c, and then averaged.
If we repeat this for all pixels in image, we get the
Gradient Image GI, where i and j are the image’s
row and column indices respectively.
(3)
If for a given region, which is covered by a window
of a predefined size S×S, the average of the squared
gradient is less than some predefined threshold T,
then this region is assumed as a texture-less region.
The average squared gradient over a predefined
window can be calculated as:
(4)
Image indices i and j are set such that the window
remains inside the image boundaries each time the
Avg is calculated. Pixels falling in weak or texture-
less regions are assigned the value β = 1, (white
color). All other pixels are assigned the value β = 0,
(black color). Fig. 4 shows the classification results
for one view of the Folder model (see section 4 for
more details about the dataset). We used the
parameters S=9 and T=3.
(a)
(b)
Figure 4: Example showing (a) original image, (b)
“textured”, ‘texture-less” classification results.
3.5.2 Segmentation based on Depth-Maps
Based on depth-maps, the weights of the graph are
given in a way such that the min-cut / max-flow
goes through regions where no depth information is
available. If the maximum depth for a given depth-
map, D, is D
max
, and the depth for a given point, p, is
D(p), the term weight, W
p
, is estimated using (5).
Where, β
p
is the supporting parameter, which is the
classification of the pixel corresponds to point p (see
section 3.5.1). And α is a tuning parameter, used to
suppress the effect of the supporting term. This kind
of suppression is very important, because the
presence of a pixel in a textured region, β
p
= 0, does
not guarantee that we have a corresponding depth
information. This usually happens if the pixel is not
visible in other views. Therefore, we set α to 10, this
has the effect of a little decrease in point weight. It is
worth mentioning that if a pixel falls in a texture-less
region, β
p
= 1, then the supporting term becomes
zero. So, the maximum possible point weight is
guaranteed. This makes sense, as there will be no
corresponding depth information for that pixel.
Basically, W
p
is the probability that point p belongs
to a problematic region.
(5)
In addition, each edge, E
pq
, which connects any two
points, p and q, is assigned two weights, W
pq
and
W
qp
, as seen in (6) and (7) respectively.
(6)
(7)
Fig. 5 (b) shows the result of segmenting a depth-
map, which has been shown in Fig. 2 (b). White
color is used to refer to pixels having no depth
information.
3.5.3 Segmentation based on Visibility-maps
As in section 3.5.2, the weights of the graph are
given such that the min-cut / max-flow goes through
the problematic regions, but now based on the
visibility-maps. Based on our definition of a
visibility-map, V, problematic regions are the
regions composed of pixels that have the least
number of projections. Therefore, these points are
given highest weight in the graph. For some given
point, p, which has the total number of projections
V(p), the term weight, W
p
, is estimated as in (8).
Note that here we also use a supporting term, which
is exactly same as the term used in section 3.5.2.
(8)
Also, each edge, E
pq
, is assigned two weights, W
pq
and W
qp
, which are calculated as in section 3.5.2 but
now point weights are estimated using (8). Fig. 5 (c)
Detection and Classification of Holes in Point Clouds
325

shows the result of segmenting a visibility-map,
which has been shown in Fig. 2 (c). White color is
used to refer to pixels having no depth information.
(a)
(b)
(c)
Figure 5: Segmentation results for both maps shown in Fig
2. Part (a) is the original point cloud, (b) depth-map
segmentation, and (c) visibility-map segmentation.
At first glance, segmentation results look in
somehow the same and this might also be supported
theoretically. Because if we have a 3D point, this
means for sure that it is visible in at least two of the
views, so depth means visible. But, for the detection
of the problematic regions, we prefer depending on
depth-map-based segmentations for the following
reason: Taking the exact depth value of each point
for weighting the graph is more efficient and robust
than taking the cue that the point is visible in the
view. Because, the noisy 3D points will be noted as
visible in views, and will contribute in weight
estimations with the same amount as the non-noisy
points. But based on depth-maps, noisy points,
which have been assigned erroneous depths, will
contribute with their depths, which will be different
from the other non-noisy points depths.
3.6 Regions of Interest (ROI) Detection
In this process, we need not only delineate the
problematic regions, but also, we need a direct
access to the points inside those regions for further
processing. Therefore, contours will be the most
appropriate tool fulfilling our demand. We also need
the detected contours to be closed. I.e., the
boundaries or edges of the problematic regions need
to be connected. In the segmentation results, which
we already saw in Fig. 5, the problematic regions,
those having no depth information, are tightly
delineated or connected. So the detection of such
regions using closed contours is quite easy. But,
after many observations, we have noticed that this
might not be the case all the time. This presents
challenges in the detection process. Therefore, as an
attempt to connect the non-connected edges, we
decided to first detect the edges of the object being
reconstructed using the original images, and then
combine the detected edges with the segmentation
results. Fig. 6 shows an example, where this
combination helps in detecting closed contours
surrounding ROI. As shown in (d), it is clear that the
contours are not tightly delineating the problematic
regions. But after the inclusion of the object's
detected edges to the segmentation edges, as shown
in (e), the detected contours are now delineating the
problematic regions in a helpful manner, as seen in
part (f).
(a)
(b)
(c)
(d)
(e)
(f)
Figure 6: Example depicting the benefit of combining both
depth and real edges in the process of ROI detection. (a)
Original Image. (b) depth-map segmentation. (c) Detected
edges based on (b). (d) Detection of the ROI based on (c).
(e) Combining both the original object edges with the
depth based edges shown in (c). (f) Detection of the ROI
based on (e).
3.7 Classification of the Detected
Problematic Regions
After the detection of the problematic regions in
images, simple approaches are investigated to check
their performance in the classification of the
detected regions.
First, we conduct a statistical measure on the
pixels in each problematic region to be classified.
This measure assumes that the behaviour of each
ROI among the views should tell about the nature of
it. This assumption has been inspired from the fact
that the human does the same whenever holes are to
be recognized by looking for details inside the hole,
like the shadow. For the sake of robustness, the
calculations are done using Hue-Saturation-Value
(HSV) color-space. Because, HSV separates the
image intensity from the color information (Haluška
et al., 2015). For the classification of a given
detected problematic region P, which appears in n
views, we first find the mean set,
, where
is the average intensity
inside the region P in view i. Then we find the
variance and standard deviation of the set M as
, and
respectively,
where µ is the mean of the set M. Finally, we make a
list of pixels appearing inside the problematic region
P in all the views and check each pixel p whether it
satisfies the condition or
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
326

not. If the percentage of pixels satisfying that
condition exceeds a given threshold, T (see section
4), then P is assumed as a virtual hole, otherwise it is
assumed as a real hole.
Second, we experiment a depth measure, which
re-projects the problematic region to be classified
into the 3D space and simply differentiates the
average depth of the 3D points on the contour
delineating the region from that inside the same
region. If the region corresponds to a real physical
hole, then it is supposed to have a significant depth
difference. Otherwise, if the region corresponds to a
virtual hole, the difference is supposed to be
negligible. A depth threshold, T
d
, is used for that
reason (see section 4).
4 EXPERIMENTAL RESULTS
As mentioned before, hole-classification has not
been addressed beforehand. Therefore, no
comparisons to other works will be given in this
section. However, many experiments have been
conducted to investigate the performance of the
proposed approach in terms of accuracy in detecting
and classifying holes. The material used in this part
includes a dataset of 55 models for different indoor
objects and scenes, each of which is reconstructed
using VisualSFM (Wu, 2011) based on a set of
images (5184 x 3456) taken from different
viewpoints. For performance issues, after estimating
the 3D models, all images are 10 times down
sampled. Fig. 7 shows a sample set of the models
used in this paper.
The reconstructed models contain many
problematic regions, with size ranges from 600 to
150,000 pixels. The size of a problematic region P is
the least number of pixels appear in P when
projected to each of the down-sampled views. As a
ground truth, we make a record of randomly selected
set of problematic regions, each of which is assigned
to either real or virtual hole. 40% of the selected set
are for real holes and 60% are for virtual holes.
Training our statistical and depth classifiers is to
estimate the values of thresholds, T and T
d
, by which
problematic regions can be classified. For that
reason, 20 models are selected randomly for
training. Many observations have been applied for
different values of these thresholds. The accuracy
corresponds to each observation has been recorded.
The highest average classification accuracy was
obtained when setting T = 30 % and T
d
= 0.01
(normalized).
(a) Castle-P19
(Strecha, 2008)
(b) Screen
(c) Chair
(d) Drawer.
(e) Door.
(f) Tiny House.
(g) Hall.
(h) Shelf.
(i) Herz-Jesu-P8
(Strecha, 2008).
(j) House.
(k) Sofa.
(l) Wheels.
Figure 7: Some of the models used in evaluating the
proposed approach.
4.1 Evaluating the Detection of the
Problematic Regions
Figure 8 shows an example of problematic regions
detection. As mentioned before, contours are used to
delineate the problematic regions. Therefore, to
quantitatively assess the detection accuracy, we
measured the similarity between the detected
contour and the ideal contour, which is set manually.
This has been done for a set of the test models. The
similarity between contours is measured using the
Pratt’s Figure of Merit (PFOM) (Abdou and Pratt,
1979) defined in (9). This measure basically depends
on estimating the distance between point pairs of the
two contours.
(9)
Detection and Classification of Holes in Point Clouds
327

Where, I
I
and I
D
are the numbers of edge points in
the ideal, ground truth, and the detected contour
respectively. d
i
is the distance between the i
th
pixel
in the detected contour and the nearest pixel in the
ideal contour. Finally, α is an experimental constant
which was set to 1/9 according to (Abdou and Pratt,
1979). The value of R ranges between 0 and 1. The
larger the value of R, the more accurate the detected
contour is. The average value of R we got in this
experiment is 0.89. This value means that
approximately 90% of the ROI is detected. This is
sufficient for the next processing steps to achieve the
goal of this research. This is because 90% of the
region’s area will definitely contain most of the
details, in which we are interested for the next
processing step.
(a)
(b)
(c)
(d)
Figure 8: Demonstrating the detection of the problematic
regions. (a) Toy Model, reconstructed using Visual-SFM
(10 images). (b) detected problematic region in one of the
images used in (a). (c) House Model, reconstructed using
Visual-SFM (10 images). (d) Two detected problematic
regions in one of the images used in (c).
4.2 Evaluating the Classification of the
Problematic Regions
To evaluate the accuracy of the proposed
classification approaches mentioned in section 3.7,
we compare the outcome of the classification
experiments with the ground truth classification. The
average accuracies for classifying virtual and real
holes using the proposed statistical classifier can be
seen in Fig. 9. Problematic regions are categorized
into 6 categories based on their sizes.
The average true positive rates for classifying
virtual and real holes are 81.74% and 80.09%
respectively. As seen in Fig. 8, the smaller the
problematic region is, the lower the true positive rate
we get. Many small virtual holes were classified as
real holes. The reason behind this is the effect of the
change in lighting conditions on those regions from
one view to the other. This effect usually biases our
classifier. Also, many small real holes were
classified as virtual holes. Because the details behind
these holes are not clearly visible.
Figure 9: True positive rates for the statistical classifier.
Figure 10 shows the average accuracies for
classifying virtual and real holes using the proposed
depth classifier. The average true positive rates for
classifying virtual and real holes are 80.44% and
83.76% respectively. In fact, for the latest measure,
the models, in which problematic regions were false
positive or false negative, are either noisy models or
having regions, in which it is very difficult to
calculate the measure because of having no depth
information inside it.
Figure 10: True positive rates for the depth classifier.
4.3 Evaluating the Efficiency of the
Proposed Approach
The results listed in this section were taken using a
personal computer running Windows 7 64-bit
operating system with Intel Core i7 3.6 GHz
processor and 16 GB Memory installed. The
approach has been implemented using C++.
The efficiency of the proposed approach is
highly dependent on the starting point from which
the processing will start, see Fig. 1. The point from
which we start usually depends on which type of
data do we have. If we only have the images of the
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
328

object and still have no 3D reconstruction of it, then
the time consumed by the proposed approach will
include the time for the bundler and 3D
reconstruction pipeline. Unfortunately, these two
components usually take long time, depending on
the size and number of input images (approximately
3 minutes to process 8 images each of which has
size 5184×3456). Nonetheless, the rest of
components in the proposed approach are very
efficient. Fig. 11 shows the average time required
for generating and segmenting depth-maps given
different numbers of input images. It is worth
mentioning that, as the number of the input images
increases, the classifications of the problematic
regions will become more stable. But, as seen in the
figure, the larger the number of views results in
longer processing times. Therefore, a kind of trade-
off is required. In practice a number between 4 and 8
images has proved to be sufficient for achieving the
goal in less than one second. Nevertheless, despite
of having a quite large number of input images, the
required time still less than 1 second for generating
the maps and less than 2.5 seconds for segmenting
them.
Figure 11: Average time required to generate and segment
depth-maps, corresponding to a given number of views.
Finally, to estimate performance of the time
required for the detection and classification of the
problematic regions, we conducted an experiment
using a set of models containing several problematic
regions with different sizes. The average
problematic region detection time we got is 0.0026
second and the average classification times we got
using the statistical and depth classifiers are 0.042
and 0.80 second respectively.
5 CONCLUSION AND FUTURE
WORK
A simple approach for the detection and
classification of holes in point sets is proposed. In
this research, it has been proved that depth-map is a
robust and efficient resource for the detection of
problematic regions in point-clouds. We also proved
that simple statistical measures can be used for the
automatic classification of the detected problematic
regions in point sets. The results of the experiments
we got are quite promising. Holes are accurately
identified and classified. Nevertheless, there are still
some problems that need to be addressed in future.
For example, robustness to lighting variations on
surfaces, as well as to noise in point clouds. Also,
our future work will concentrate in filling holes,
which are classified as virtual holes.
ACKNOWLEDGMENTS
The authors would like to thank the German
Academic Exchange Service (DAAD) for providing
financial support for research studies. We are
grateful to our colleagues who provided insight and
expertise that greatly assisted this research work.
REFERENCES
Abdou, I. E. and Pratt, W. K., 1979. Quantitative design
and evaluation of enhancement/thresholding edge
detectors. Proceedings of the IEEE, 67(5), pp.753-763.
Alismail, H., Browning, B. and Lucey, S., 2016. Direct
Visual Odometry using Bit-Planes. arXiv preprint
arXiv:1604.00990.
Alismail, H., Browning, B. and Lucey, S., 2016.
Photometric Bundle Adjustment for Vision-Based
SLAM. arXiv preprint arXiv:1608.02026.
Bendels, G. H., Schnabel, R. and Klein, R., 2006.
Detecting holes in point set surfaces.
Boykov, Y. and Funka-Lea, G., 2006. Graph cuts and
efficient ND image segmentation. International
journal of computer vision, 70(2), pp.109-131.
Dey, T. K. and Giesen, J., 2003. Detecting undersampling
in surface reconstruction. In Discrete and
Computational Geometry (pp. 329-345).
Furukawa, Y. and Ponce, J., 2010. Accurate, dense, and
robust multiview stereopsis. IEEE transactions on
pattern analysis and machine intelligence, 32(8),
pp.1362-1376.
Detection and Classification of Holes in Point Clouds
329

Haluška, J., 2015. On fields inspired with the polar HSV-
RGB theory of Colour. arXiv preprint
arXiv:1512.01440.
Kong, L. X., Yao, Y. and Hu, Q. X., 2010. Hole boundary
identification algorithm for 3D closed triangle mesh.
Computer Engineering, 36, pp.177-180.
Lindeberg, T., 2012. Scale invariant feature transform.
Scholarpedia, 7(5), p.10491.
Muratov, O., Slynko, Y., Chernov, V., Lyubimtseva, M.,
Shamsuarov, A. and Bucha, V., 2016. 3DCapture: 3D
Reconstruction for a Smartphone. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition Workshops (pp. 75-82).
Noble, J. A., Gupta, R., Mundy, J., Schmitz, A. and
Hartley, R.I., 1998. High precision X-ray stereo for
automated 3D CAD-based inspection. IEEE
Transactions on Robotics and automation, 14(2),
pp.292-302.
Saponaro, P., Sorensen, S., Rhein, S., Mahoney, A.R. and
Kambhamettu, C., 2014, October. Reconstruction of
textureless regions using structure from motion and
image-based interpolation. In 2014 IEEE International
Conference on Image Processing (ICIP) (pp. 1847-
1851). IEEE.
Scharstein, D. and Szeliski, R., 2002. A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1-3), pp.7-42.
Snavely, N., Seitz, S. and Szeliski, R., 2006. Photo
Tourism: Exploring Image Collections in 3D. ACM
Transactions on Graphics.
Snavely, N., Seitz, S. M. and Szeliski, R., 2008. Modeling
the world from internet photo collections.
International Journal of Computer Vision, 80(2),
pp.189-210.
Strecha, C., von Hansen, W., Van Gool, L., Fua, P. and
Thoennessen, U., 2008, June. On benchmarking
camera calibration and multi-view stereo for high
resolution imagery. In Computer Vision and Pattern
Recognition, 2008. CVPR 2008, pp. 1-8.
Tomasi, C. and Kanade, T., 1992. Shape and motion from
image streams under orthography: a factorization
method. International Journal of Computer Vision,
9(2), pp.137-154.
Wang, J. and Oliveira, M. M., 2007. Filling holes on
locally smooth surfaces reconstructed from point
clouds. Image and Vision Computing, 25(1), pp.103-
113.
Wang, Y., Liu, R., Li, F., Endo, S., Baba, T. and Uehara,
Y., 2012, August. An effective hole detection method
for 3D models. In Signal Processing Conference
(EUSIPCO), 2012 Proceedings of the 20th European
(pp. 1940-1944). IEEE.
Wu, C., 2011. VisualSFM: A visual structure from motion
system.
Zaman, F., Wong, Y. P. and Ng, B. Y., 2016. Density-
based Denoising of Point Cloud. arXiv preprint
arXiv:1602.05312.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
330
