
Autonomous Aerial Vehicle
Based on Non-Monotonic Logic
Jos
´
e Luis Vilchis Medina
1
, Pierre Siegel
1
and Andrei Doncescu
2
1
Aix Marseille Universit
´
e, CNRS, LIF, Marseille, France
2
LAAS, CNRS, Toulouse, France
Keywords:
Autonomous Motor-glider, Non-monotonic Reasoning, Default Logic, Decision-making, Solar Cells, Artifi-
cial Intelligence.
Abstract:
In this article we study the case of an autonomous motor-glider. The aims of the aircraft is to maintain its
flight as long as possible, taking advantage of the rising air from the ground, known as thermals, despite of
limited energy resources and possible external influences, such as turbulences. The pilot task being to make
decisions with incomplete, uncertain or even contradictory information, as well as driving to the desired path
or destination. We propose the formulation of a model from the point of view of logical theory, using non-
monotonic logic and more specifically default logic, to tackle these problems. Finally, we present the results
of a simulation for further application in a glider(reduced model) which use solar cells for power management
in embedded system.
1 INTRODUCTION
The glider is one of the most relevant aircraft, in terms
of the ratio of the distance traveled and the loss of
altitude. Making it more efficient to fly than other
aircrafts. In this paper, we focus on an autonomous
glider(reduced model), a convenient choice(cost) in
terms of weight and aerodynamics. The principle of a
glider is that it uses the “vertical” wind (thermal and
dynamic energy). It is to “climb”, which that means
to increase in altitude and reach an updraft, while “de-
scent”, expresses the rate of descent in a downward
burst. “Zero” descent means that updrafts are strong
enough to maintain flight, but not enough to allow
climbing. As in the nature, there are various species
of birds using the same principle. For example: alba-
tross and condor. To perform those flight maneuvers,
a pilot must take decisions concerning the flight sit-
uation from the cockpit. He has access to different
instruments showing altitude, wind speed, inclination
of the aircraft, etc. Another constraint is that he also
needs to find thermals, respecting the aeronautical and
security regulations. Taking these considerations into
account, the pilot must follow his desired flight path
applying control commands. Increasing or decreasing
altitude, turning to the right or left, etc. These rules
are applicable to many types of aircraft. We intro-
duce a discrete model of flight rules. This method is
based on non-monotonic logic. There are different re-
search proposals in non-monotonic logic reasoning:
default reasoning, autoepistemic reasoning, reason-
ing in the presence of contradictory information and
negative reasoning (El-Azhary et al., 2002). On an-
other side, we can consider our model as a resilient
system. These systems have the ability to resist and
adapt from disturbances. They also are highly adap-
tive, having the capability to merge information, make
decisions, interact with multiple agents and have a
memory to facilitate learning (Goerger et al., 2014;
Chandra, 2010). The main objective is to present a
system based on flight rules capable to choose actions
with incomplete information. The case study is pre-
sented in section 2. In section 3 classical logic rep-
resentation is described. Section 4 is dedicated to the
theoretical definition of default logic and its proper-
ties. Section 5 contains an explanation of the logical
system using default logic representation and finally,
section 6 practical case is described.
2 RELATED WORK
Research shows (Toulgoat et al., 2011; Toulgoat,
2011; Doncescu and Siegel, 2015; Le et al., 2013)
that prove decision-making by non-monotonic logic
is encouraging in the field of artificial intelligence. A
236
Medina, J., Siegel, P. and Doncescu, A.
Autonomous Aerial Vehicle - Based on Non-Monotonic Logic.
DOI: 10.5220/0006304002360241
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 236-241
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

pilot is a person who has the function of guiding an
aircraft in flight. Generally, the main cockpit flight
control are: control yoke, rudder pedals and engine
speed. Aircraft cockpit provides necessary informa-
tion to control the trajectory and operation of the air-
craft (de l’Aviation Civile., 1992).
2.1 Flight Indicators
On-board aircraft the basic set of instruments, also
called “six pack”(de l’Aviation Civile., 1992). These
six instruments are standard and many cockpits basic
indicators are:
• Altimeter: shows the aircraft’s altitude (in feet)
above sea-level. As the aircraft ascends, the al-
timeter to indicate a higher altitude and vice versa.
• Airspeed indicator: shows the aircraft’s speed (in
knots) relative to the surrounding air. It works
by measuring the ram-air pressure in the aircraft’s
Pitot tube relative to the ambient static pressure.
• Vertical speed indicator: sometimes called a var-
iometer or also rate of climb indicator, senses
changing air pressure, and displays that informa-
tion to the pilot as a rate of climb or descent in
feet per minute or meters per second.
• Attitude indicator: also known as an artificial
horizon. Shows the aircraft’s relation to the hori-
zon. From this the pilot can tell whether the
wings are level (roll, Fig. 1) and if the aircraft
nose is pointing above or below the horizon (pitch,
Fig. 1).
• Turn indicator: This instrument includes the
Turn-and-Slip Indicator and the Turn Coordina-
tor, which indicate rotation about the longitudinal
axis.
• Heading indicator: displays the aircraft’s heading
with respect to magnetic north when set with a
compass.
2.2 Flight Control
One time the pilot knows the flight situation through
on-board instruments, he must take decisions and ap-
ply control commands(actions). Thereby accurately
correcting the trajectory. For flight control, the pilot
has 3 types of controllers. Generally, these controllers
are in much type of aircrafts (de l’Aviation Civile.,
1992). Description of controllers for our case, are de-
scribed below:
• Yoke: has the function of controlling in both pitch
and roll (Fig. 1).
Figure 1: Definition of aircraft body axes.
1. Pitch controller: When the yoke is pulled back
the nose of aircraft rises and when it is pulled
forward the nose descend.
2. Roll controller: When the yoke is turned right
the aircraft rolls to the right(turning right) and
when it is turned left the aircraft rolls to the
left(turning left).
• Rudder: also pedal direction. When pilot push
left pedal, rudder deflects to the left and when pi-
lot push right pedal, rudder deflects to the right.
With rudder, pilot can not use it to turn left or turn
right. Rudder is important for flight stabilization.
• Engine power: When pilot turn on the engine, it
provides propulsion to the aircraft, if necessary.
Aircraft control systems are based on integro-
differential equations or state-space form (Fossen,
2011). We present another method/solution tackled
from the perspective of Artificial Intelligence. Next,
we introduce how we can describe the issue by using
logical representation.
3 CLASSICAL LOGIC
REPRESENTATION
To describe actions, we use classical logic language
L (Propositional or First-Order Logic). In L, we can
represent, for example, motor(t
i
) to say that motor is
active at the time t
i
. Or altitude(low,t
i
) to say that
the altitude is decreasing at the time t
i
. We are in a
logical framework, so it is possible to represent al-
most everything we want in a natural way. Classical
logic, such as First-Order Logic is monotonous. What
it means, A ` w then A ∪ B ` w. This is, by adding
new information or set of formulas to a model, the set
of consequences of this model is not reduced. The
property of monotony is very important in the world
of mathematics, because it allows to describe lemmas
previously demonstrated. But this property cannot be
Autonomous Aerial Vehicle - Based on Non-Monotonic Logic
237

applied to uncertain and incomplete information. But
in real world, non-monotonic is presents in many sit-
uations, this is, each new information we learn can
modify or invalidate previous deductions. A classic
example is:“Birds typically fly”. This expression can-
not be translated by the formula bird(X ) → f ly(X),
which will signify that all birds fly. But, there are ex-
ceptions to this rule (i.e. if X = Penguin, by definition
a penguin is a bird but he not fly). These exceptions
are well known in Artificial Intelligence. In the next
table, we represent the actions that pilot can do to cor-
rect the trajectory of the glider. We consider a discrete
system with three possible actions for each of the con-
trollers, except for the motor(which it has two states),
resulting 11 states.
Table 1: Possible actions.
Roll: Pitch:
yoke(le f t,t
i
) yoke(pull,t
i
)
yoke roll(neutral,t
i
) yoke pitch(neutral,t
i
)
yoke(right,t
i
) yoke(push,t
i
)
Yaw: Propulsion:
rudder(le f t,t
i
) motor(t
i
)
rudder(neutral,t
i
) non motor(t
i
)
rudder(right,t
i
)
For the first approach, we will explicitly give basic
pilot rules. For example, we might say, “the yoke is
to the right position at the time t”. We can represent
in classical logic: yoke(le f t,t
i
). We use this nota-
tion: var = variometer, ther= thermal, alt = altitude,
non ther = non thermal, srh th = searching thermal.
A set of rules is explicitly given:
var(up,t
i
) ∧ non motor(t
i
) → ther(t
i+1
) (1)
batt(low,t
i
) ∧ alt(low,t
i
) → land(t
i+1
) (2)
non ther(t
i
) ∧ alt(low,t
i
) → land(t
i+1
) (3)
non ther(t
i
) ∧ alt(low,t
i
) → srh th(t
i+1
) (4)
non motor(t
i
) ∧ var(up,t
i
)∧
turn(le f t,t
i
) → yoke(right,t
i+1
)
(5)
non motor(t
i
) ∧ var(up,t
i
)∧
turn(right,t
i
) → yoke(le f t,t
i+1
)
(6)
var(up,t
i
) ∧ non motor(t
i
) → alt(up,t
i+1
)
(7)
batt(low,t
i
) ∧ non motor(t
i
) → alt(down,t
i+1
)
(8)
motor(t
i
) ∧ yoke(pull,t
i+1
) → alt(up,t
i+1
)
(9)
Intuitively, we can say,“the variometer is in-
creasing at the time t”, in logical representation is:
var(up,t
i
). It is of course possible to add oth-
ers rules(Aeronautics Legislation) to take into ac-
count relations between the real scenario and our
logical system. These logical formulations be-
fore presented, are problematic because there is a
conflict. If for example we have a set of for-
mulas: F = {var(up,t
i
),non motor(t
i
),batt(low,t
i
)},
and now, we infer (rule 7 and 8) F: alt(up,t
i+1
) and
alt(down,t
i+1
), which is a contradiction. To solve this
conflict, we use non-monotonic logic, more specifi-
cally, the default logic.
3.1 Definition of Non-monotonic Logic
It is a family of formal logic devised to capture and
represent inference, reserving the right to retract de-
ductions when new information is added. The first
works in the field of non-monotonic logics began with
the realization to precise characterization of defeasi-
ble reasoning. Among the pioneers of the field in
the late 1970’s were J. McCarthy (McCarthy, 1980;
McCarthy, 1986), D. McDermott and J. Doyle, and
R. Reiter(Reiter, 1980). Deriving in different non-
monotonic logics(Somb
´
e, 1990; Suchenek, 2006;
Delgrande and Schaub, 2005; Delgrande and Schaub,
2003) reasoning: default reasoning(Reiter, 1980), au-
toepistemic reasoning, reasoning in the presence of
contradictory information, counterfactual reasoning,
priority reasoning, and negative reasoning(El-Azhary
et al., 2002).
3.2 Definition of Default Logic
A default theory T consists of a set of facts W ,
which are formulas of First-Order logic and a set
of defaults D, which are rules of inference (Re-
iter, 1980; Grigoris, 1999; Lukaszewicz, 1988; Lif-
schitz, 1999). The main representational tool is that
of a default rule, or simply a default. A default is
an inference rule of the form:
A(X) : B(X)
C(X )
, where
A(X),B(X),C(X) are well-formed formulas (First-
Order Logic). Where X = (x
1
,x
2
,x
3
,..., x
n
) as a vec-
tor of free variables(non-quantified). A(X) are the
prerequisites, B(X) are the justifications and C(X ) are
the consequent. Intuitively, a default means:“if A(X )
is true, and there is no evidence that B(X ) might be
false, then C(X) can be true”. Default rules are used
to create extensions. These can be contemplated as
a set of inferences. It is named normal default, if
B(X) = C(X).
3.3 Definition of Extension
When defaults are calculated, the number of formu-
las inferred in the knowledge base W increase. An
extension of the default theory ∆ = (D,W ) is a set E
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
238

of logical formulas(Reiter, 1980). An extension must
to verify following property: If d is a default of D,
whose the prerequisite is in E, without the negation
of its justification is not in E, then the consequent of
d is in E. Formally, E is an extension of ∆ if and only
if:
• E = ∪
∞
i=0
E
i
with:
• E
0
= W and for i ≥ 0
E
i+1
= T h(E
i
)∪{C(X)|
A(X) : B(X)
C(X )
∈ D, A(X) ∈
E
i
and ¬B(X) 6∈ E}
where T h(E
i
) is the set of formulas derived from
E
i
. The previous definition is difficult to apply in
practice. Because ¬B 6∈ E supposes E is known,
but E is not yet calculated. In the case of normal
defaults(B(X) = C(X)), an extension is defined: E is
an extension of ∆ if and only if:
• E = ∪
∞
i=0
E
i
with:
• E
0
= W and for i ≥ 0
E
i+1
= Th(E
i
)∪{C(X)|
A(X) : C(X)
C(X )
∈ D, A(X) ∈
E
i
and ¬C(X) 6∈ E
i
}
where T h(E
i
) is the set of formulas derived from
E
i
. According to Reiter(Reiter, 1980), if all defaults
are normal, it exists at least one extension. Extensions
are defined by a fixed point.
4 DEFAULT LOGIC
REPRESENTATION
Flight rules are described by a set of rules. For exam-
ple, alt(up) is a positive literal, means that the glider
increases in altitude. The dynamic of the system can
be described by var(up,t), which means that the var-
iometer at the time t is increasing. Clauses are the
simplest type of formula. Formally, a clause is a dis-
junction of literals l
1
∨ l
2
∨ l
3
∨ ... ∨ l
n
. A Horn clause
is a clause with a maximum of one positive literal.
It’s a formula defined as ( f
1
∧ f
2
∧ f
3
∧ ... ∧ f
i
) → g,
where f
i
and g are positive literal. Similarly, the for-
mula defined as ¬( f
1
∧ f
2
∧ f
3
∧ ... ∧ f
i
) is equivalent
to the negative Horn clause(literals can not be true si-
multaneously). In default logic, we have two sets of
rules. The set D of defaults and the set W of facts.
For example, set W : batt(good) that is an elementary
fact says that battery has sufficient power. And set
D:
batt(good) : motor(on)
motor(on)
, this default rule means,
“Generally when battery has sufficient power, motor
is on”. Therefore, we introduce normal defaults rep-
resentation.
4.1 Set of Default [D]
The set of inference rules D describes possibles ac-
tions, including incomplete and contradictory infor-
mation. It represents a normal default. By using de-
fault logic, the rules(7, 8 and 9 in section 3) above
could be expressed intuitively as:
7’ If var(up,t
i
),non motor(t
i
) are true, and if
alt(up,t
i+1
) is not contradictory, then alt(up,t
i+1
)
is true.
8’ If batt(low,t
i
),non motor(t
i
) are true, and
if alt(down,t
i+1
) is not contradictory, then
alt(down,t
i+1
) is true.
9’ If motor(t
i
),yoke(pull,t
i+1
) are true, and if
alt(up,t
i+1
) is not contradictory, then alt(up,t
i+1
)
is true.
Taking the rules(7’,8’ and 9’), default logic repre-
sentation is presented, d =
A(X) : C(X)
C(X )
.
d
1
=
var(up,t
i
) ∧ non motor(t
i
) : alt(up,t
i+1
)
alt(up,t
i+1
)
d
2
=
batt(low,t
i
) ∧ non motor(t
i
) : alt(down,t
i+1
)
alt(down,t
i+1
)
d
3
=
motor(t
i
) ∧ yoke(pull,t
i+1
) : alt(up,t
i+1
)
alt(up,t
i+1
)
4.2 Set of Default [W]
The set of facts W represents accurate and non-
revisable information. The facts are formulas always
true. Unary clauses are elementary source of informa-
tion. We can use such a clause to represent a mutual
exclusions. For example, taking the rule “The motor-
glider can not search a thermal and land at the same
time”, ∀t,¬(glider(search ther,t
i
)∧glider(land,t
i
)).
4.3 Extensions Calculation
To illustrate the use of the default logic,
we give in the next paragraph an exam-
ple of calculation by using the Algorithm 1.
W = motor(o f f ,t),alt(down,t), var(down,t),
batt(good,t). With: ∀t, ¬(glider(land,t + 1) ∧
glider(srh th,t + 1)). Intuitively, W means that
glider has not using motor(as propulsion), its altime-
ter is decreasing, its variometer is decreasing and its
battery has sufficient power at time t
i
, respectively.
The Algorithm 1 presented below is written in
Prolog. Our algorithm calculates the extensions.
As the clauses are Horn clauses, and as the de-
faults are normal. The results obtained using a
set D(subsection 4.1) and a set W (subsection 4.2)
Autonomous Aerial Vehicle - Based on Non-Monotonic Logic
239
are: E
0
= {glider(srh th,t),motor(o f f ,t),alt(down,t),
var(down,t),batt(good,t)}
d
0
=
alt(down,t) ∧ var(down,t) : glider(srh th,t +1)
glider(srh th,t +1)
(10)
E
1
= {glider(land,t),motor(o f f ,t), alt(down,t),
var(down,t),batt(good,t)}
d
1
=
alt(down,t) ∧ var(down,t) : glider(land,t + 1)
glider(land,t +1)
(11)
We can see that W uses a rule that says
glider(srh th,t + 1) and glider(land,t + 1) are mutu-
ally exclusive. According to this rule, it is not pos-
sible to use d
0
and d
1
at the same time. If d
0
is
used, glider(land,t + 1) is added to the extension,
then mutual exclusive will cancel d
1
. In the same
way, if d
1
is used we cannot use d
0
. We obtain 2
contradictory extensions(solutions). In the first one
there is glider(srh th,t + 1)(The glider can search
a thermal at time t + 1) and the other one there is
glider(land,t + 1)(The glider can land at time t + 1).
In this way, the conflict shown in section 3 is resolved.
Data: E =
/
0 (Set of extensions E is empty)
Result: E = ∪
N
i=0
E
i
Initialization;
CalculExtension(E);
while there is a default (A(X) : C(X))/C(X)
that has not yet been inspected do
Select the default D;
Verify A(X) are true;
Verify C(X) is consistent with W ;
Add C(X) to W ;
end
Backtracking(deleting C(X) added to W );
CalculExtension(E);
Algorithm 1: Calculation of extensions.
In practice, the choose of extension corresponds
a weight to each default considering its importance.
An example could be, to search a thermal is more pri-
ority (more weight) than land(Toulgoat, 2011; Grig-
oris, 1999). These decisions are based on weighted
product model: P(A
K
/A
L
) =
∏
n
j=1
(a
K j
/a
L j
)
w
j
for
K,L = 1, 2, 3, ...,m. Using this method we ponder ex-
tensions then we select the best response.
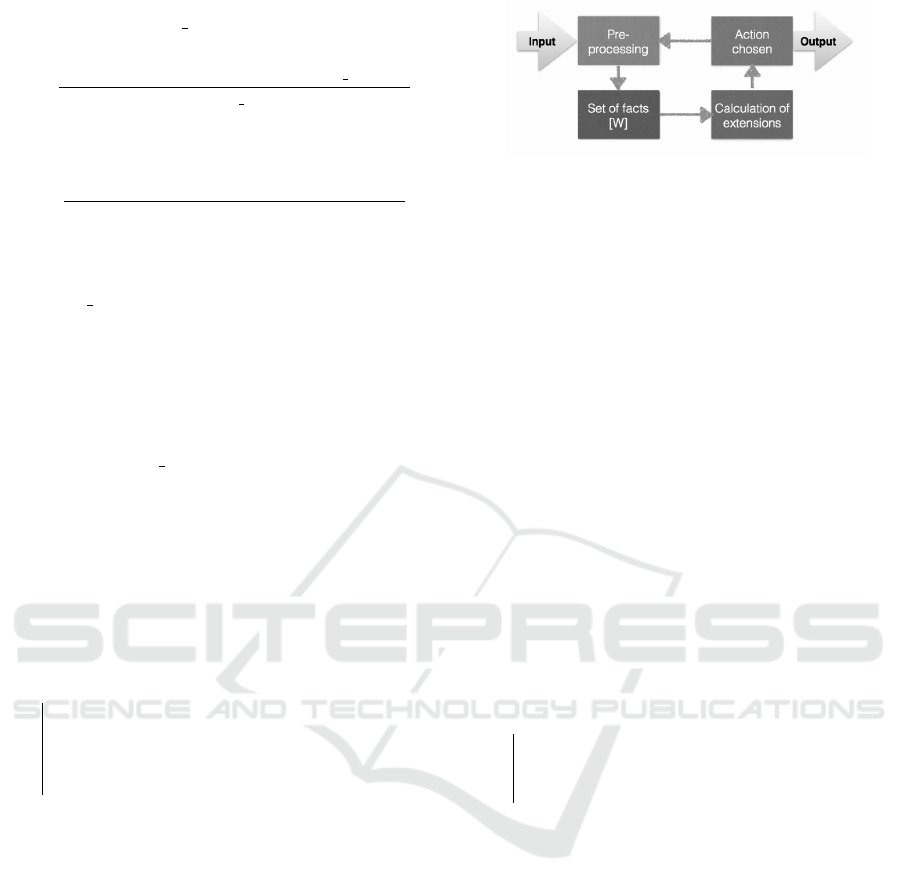
5 APPLICATION
In this section we present the practical application
and current work. In the Fig. 2 shows the different
parts of our discrete model. On the left side in the
Figure 2: Operating diagram.
Fig. 2, we have the Input such as data, which acces-
sible from electronic devices. Different data are air-
speed, altitude, angles of pitch and roll, etc. Block Set
of facts[W] accepts data for knowledge representa-
tion. Next, Calculation of extensions and Action cho-
sen blocks are the representation of our Algorithm 1.
Finally, we have Output such as an action to apply.
Certainly to the servo-motors to control pitch, roll
and eventually yaw(Fig. 1). These actions will be
applied to a glider(reduced model,Sky Scout version
R2GO). Our glider is equipped with a motor, in case
he needs desperate increase his altitude or find a rising
air. On the other hand, the motor-glider is equipped
with an on-board computer. Prolog has been installed
and sensors have been successfully implemented. The
Algorithm 2 is presented which represents the blocks
of Pre-processing and Set of facts[W], described in
Fig. 2. T
s
is sampling time in seconds.
Data: From electronic device [I]
Result: Set of facts [W ]
Initialization of electronics devices;
while T
s
=1 do
CaptureData(I) from electronics devices;
DescriptionFacts(W) by following our
syntax;
end
Algorithm 2: Knowledge representation.
Data are from the Inertial Measurement
Unit(IMU). An electronics device which collects
angular velocity and linear acceleration data. Usually
a combination of accelerometers and gyroscopes,
sometimes also magnetometers. An IMU works by
detecting changes in rotational attributes like pitch,
roll and yaw, using gyroscopes. On the other hand,
signal processing techniques(Fig. 2) has tremendous
potential in the information fusion theory and in
practical applications. Important part because is the
process of integration of multiple data for knowledge
representation. The acquisition of knowledge is
defined by rules(subsection 4.3). In Fig. 3, rotation
on the X axis is represented, the combination of
accelerometer(circle) and gyroscope(line) data, the
result is a signal(triangle) that we use to describe the
world.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
240

Figure 3: Data fusion.
6 CONCLUSIONS
In our approach, an algorithm based on default
logic is proposed to tackle contradictory information.
Flight rules are uncertain, because many situations in-
clude contradictions and we have to verify them. Fur-
thermore, aeronautics legislation is based on contra-
dictory rules. Non-monotonic logic has a great advan-
tage in these kind of cases. We presented a simulation
of a glider searching thermals. The results provide
the basis for an autonomous motor-glider. We pre-
sented short and simple Prolog programs. For initial
tests(around 100 rules), we calculate all extensions in
a short time. The calculation takes 1956600 Logical
Inferences Per Second (LIPS) and 0.049 seconds of
central processing unit (CPU) time on a MacBook.
Discrete model is currently being developed for test-
ing. Sensors and on-board computer set-up is com-
plete. We configured an embedded system, installing
prolog (SWI-Prolog). We also have installed an em-
bedded sensor with 10 degrees of freedom (DOF). To
capture data, such as altitude, acceleration, pitch, roll,
yaw, etc. for knowledge representation. More rules
are currently incorporated to take into account the
aeronautics legislation and solar power management
for on-board systems.
ACKNOWLEDGEMENTS
We thanks to the Secretariat of Energy (SENER)
through the Mexican National Council for Sci-
ence and Technology (CONACYT)[grant number
581317/412566] for their support.
REFERENCES
Chandra, A. (2010). Synergy between biology and systems
resilience. Scholars’ Mine.
de l’Aviation Civile., D. G. (1992). Manuel du pilote
d’avion Vol
`
a vue.
Delgrande, J. and Schaub, T. (2003). On the relation be-
tween reiter’s default logic and its (major) variants.
Seventh European Conference on Symbolic and Quan-
titative Approaches to Reasoning with Uncertainty
(ECSQARU).
Delgrande, J. and Schaub, T. (2005). Expressing default
logic variants in default logic. Journal of Logic and
Computation.
Doncescu, A. and Siegel, P. (2015). DNA Double-
Strand Break-Based Nonmonotonic Logic. Computa-
tional Biology, Bioinformatics and Systems Biology.
Elservier.
El-Azhary, Edrees, A., and Rafea, A. (2002). Diagnostic
expert system using non-monotonic reasoning. Expert
Systems with Applications, pages 137–144.
Fossen, T. (2011). Mathematical models for control of air-
craft and satellites. Department of Engineering Cy-
bernetics, NTNU.
Goerger, S., Madni, A., and Eslinger, O. (2014). Engineered
resilient systems: A dod perspective. Procedia Com-
puter Science, pages 865–872.
Grigoris, A. (1999). A tutorial on default logics. ACM Com-
puting Surveys.
Le, T., Doncescu, A., and Siegel, P. (2013). Utilization of
default logic for analyzing a metabolic system in dis-
crete time. ICCSA.
Lifschitz, V. (1999). Success of default logic. Logical Foun-
dations for Cognitive Agents: Contributions in Honor
of Ray Reiter.
Lukaszewicz, W. (1988). Consideration on default logic: an
alternative approach. Comput. Intell.
McCarthy, J. (1980). Circumscription - a form of non-
monotonic reasoning. Artificial Intelligence.
McCarthy, J. (1986). Applications of circumscription to for-
malizing common-sense knowledge. Artificial Intelli-
gence.
Reiter, R. (1980). A logic for default reasonig. Artificial
Intelligence, pages 81–132.
Somb
´
e, L. (1990). Reasoning under incomplete information
in artificial intelligence: a comparison of formalisms
using a single example. John Wiley and Sons Inc.
Suchenek, M. (2006). On undecidability of non-monotonic
logic. Studia Informatica.
Toulgoat, I. (2011). Mod
´
elisation du comportement humain
dans les simulations de combat naval. PhD thesis,
Laboratoire SNC/DCNS.
Toulgoat, I., Siegel, P., and Doncescu, A. (2011). Mod-
elling of submarine navigation by nonmonotonic
logic. BWCCA.
Autonomous Aerial Vehicle - Based on Non-Monotonic Logic
241
