
Acquisition of Relative Trajectories of Surrounding Vehicles using
GPS and DSRC based V2V Communication with Lane Level
Resolution
Zhiyuan Peng
1
, Shah Hussain
1
, M. I. Hayee
1
and Max Donath
2
1
University of Minnesota Duluth, Duluth, MN 55812, U.S.A.
2
University of Minnesota Twin Cities, Minneapolis, MN 55455, U.S.A.
Keywords: Connected Vehicle Technology, V2V Communication, DSRC, Relative Trajectory, Relative Distance
Accuracy.
Abstract: Due to the anticipated benefits of connected vehicle technology, the Intelligent Transportation Systems Joint
Program Office (ITSJPO) of the US Department of Transportation continues to emphasize the need for
dedicated short range communication (DSRC) based vehicle-to-vehicle (V2V) and/or vehicle-to-
infrastructure (V2I) communication to enhance driver safety and traffic mobility. To take full advantage of
connected vehicle technology in most safety applications, precise vehicle positioning information is needed
in addition to V2V communication. Many techniques, such as vision- or sensor-based systems and
differential GPS receivers, can obtain the precise absolute position of a vehicle at the expense of cost and
complexity. However, some critical safety applications such as merge-assist or lane-change-assist systems
require only the relative positions of surrounding vehicles with lane-level resolution so that a given vehicle
can differentiate the vehicles in its own lane from the vehicles in adjacent lanes. We have adopted a simple
approach to acquire accurate relative trajectories of surrounding vehicles using standard GPS receivers and
DSRC-based V2V communication. Using this approach, we have conducted field tests to successfully
acquire relative trajectories of vehicles traveling in multiple lanes towards a merging junction with an
accuracy less than half of the lane width. The achieved accuracy level of the relative trajectory was
sufficient to differentiate vehicles traveling in adjacent lanes of a multiple-lane freeway.
1 INTRODUCTION
The Intelligent Transportation Systems Joint
Program Office (ITSJPO) of the US Department of
Transportation (USDOT) continues to be committed
to the use of dedicated short range communication
(DSRC) for active safety applications using vehicle-
to-vehicle (V2V) and/or vehicle-to-infrastructure
(V2I) communication due to its designated licensed
bandwidth, fast network acquisition, and low latency
(USDOT factsheet a, b). A USDOT research report
estimates that V2V communication has the potential
to help drivers avoid or mitigate 70 to 80 percent of
vehicle crashes involving unimpaired drivers, which
could help prevent thousands of deaths and injuries
on roads every year (Harding, J., Powell, et al 2014,
NHTSA USDOT factsheet). To take full advantage
of the potential safety benefits of connected vehicle
technology, relative trajectories of the surrounding
vehicles with lane-level resolution are needed in
addition to V2V communication (D. Jie and M. J.
Barth, 2008). Accurate positioning information with
lane-level resolution can enable many vehicular
safety applications (e.g., freeway merge-assist, lane-
change-assist, and lane-departure warning systems),
which could potentially help avoid many crashes (S.
Ammoun, F. Nashashibi et al. 2007, D. Desiraju, T.
Chantem 2015). According to one study, 36 percent
of the freeway accidents analyzed occurred on
entrance ramps, and another study reported that 20–
30 percent of total truck accidents nationwide occur
on or near ramps (A.T. McCartt et al. 2004, Bruce
N. Janson et al. 1998). Similarly, in 1991, lane-
change accidents accounted for approximately 4
percent of all police-reported crashes that occurred
in the United States; in 1999, those accidents rose to
9 percent (Basav Sen et al. 2003, G. M. Fitch et al.
2009). Another report that analyzed crash data from
2005 to 2007 concluded that 11 percent of vehicles
242
Peng, Z., Hussain, S., Hayee, M. and Donath, M.
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution.
DOI: 10.5220/0006304202420251
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 242-251
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

involved in an accident had failed to stay in the
proper lane (NHTSA: Report to congress, 2008).
An important technological milestone in the
development of a lane-change or merge-assist
application is to acquire the relative positions of
surrounding vehicles in real time. Accurate
positioning information can be obtained using either
sensor-based systems or Global Navigation Satellite
Systems (GNSSs). Both approaches have their
limitations. Sensor-based systems utilize vision- or
laser-based sensors to acquire the relative positions
of surrounding vehicles (D Chun.; K, Stol. 2012,
Abdelfatah, W.F., et al. 2011, Qingquan Li et al.
2014, H. Zhao et al. 2009). However, environmental
factors such as weather, variable lighting conditions,
absence of line-of-sight (LoS), or worn out road
markings can adversely affect the performance of
these systems (A. Bansal et al. 2014). Similarly,
GNSS-based technologies such as Global
Positioning System (GPS) cannot predict the
position of a vehicle with lane-level accuracy
without using a correction or augmentation system
e.g., differential GPS technology, inertial sensors,
gyroscope, and/or high-resolution maps (R. Toledo-
Moreo et al. 2007, N. Mattern et al. 2010, R. G.
García-García et al. 2007, J. Juang et al. 2015, S.
Rezaei and R. Sengupta 2007). Furthermore, the
deployment of either sensor-based or GPS-based
system requires sophisticated hardware and
software, resulting in increased complexity and
higher overall costs.
The above-mentioned techniques can obtain the
precise absolute position of a vehicle at the expense
of cost and complexity. However, some critical
safety applications such as merge-assist or lane-
change-assist systems require only the relative
positions of surrounding vehicles with lane-level
resolution to allow a given vehicle to differentiate
the vehicles in its own lane from the vehicles in
adjacent lanes (N. Alam et al. 2013). Therefore, in
the approach presented in this paper, we have
focused on acquiring the relative trajectories of
surrounding vehicles using standard GPS
receivers—without any additional correction
system—and DSRC-based V2V communication.
Our approach to acquire relative trajectories is
based on the fact that a major part of GPS
positioning error, caused by atmospheric effects, is
highly correlated over a vast geographical area (J.
Farrell, T. Givargis 2000, FHWA factsheet).
Therefore, multiple GPS receivers of the same kind
on different vehicles in close proximity tend to have
a similar atmospheric error at a given time. The
common atmospheric error could be canceled out to
obtain a more accurate estimate of the relative
distance between any two vehicles as compared to
the absolute position of each vehicle. Utilizing this
approach, we have successfully acquired relative
trajectories of vehicles traveling in multiple lanes
toward a merging junction with an accuracy of less
than half of the lane width using DSRC-based V2V
communication and standard GPS receivers. The
accuracy of the acquired relative trajectory was
sufficient to differentiate vehicles traveling in
adjacent lanes of a multiple-lane freeway.
The next section of this paper will describe the
concept of relative GPS positioning among
surrounding vehicles. The following section will
discuss the results from field tests to statistically
characterize the accuracy of the relative trajectories
of multiple vehicles using standard GPS receivers.
In the next section, the results from field tests to
acquire relative trajectories of surrounding vehicles
with lane-level accuracy using DSRC-based V2V
communication will be discussed. The last section
will summarize the conclusions.
2 CONCEPT OF RELATIVE GPS
POSITIONING AMONG
SURROUNDING VEHICLES
Our approach utilizes standard GPS receivers and
DSRC-based V2V communication to acquire the
relative trajectories of surrounding vehicles. The
absolute position accuracy of a standard GPS
receiver is in the range of 3–5m (William J. Hughes,
2014). This means that a GPS receiver can estimate
the position of a vehicle within a circle with a radius
of 3–5m, as shown in Figure 1a, where the true
position of the vehicle at a given time is shown by a
green dot and the red dot shows the estimated
position by the GPS receiver. The error vector from
the true position to the estimated position represents
the GPS position error. The total GPS position error
is a combination of multiple errors resulting from
different sources. Generally, the combined GPS
position error is a result of three major errors:
mechanical error, satellite ephemeris error, and
atmospheric error.
The mechanical GPS error is caused by inherent
noise or clock jitter of the crystal oscillator used in
the GPS receiver, thermal effects, manufacturing
differences, and residual mathematical error due to
quantization and rounding (D. K. Schrader 2013, R.
B. Langley 1997). Satellite ephemeris error is due to
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution
243
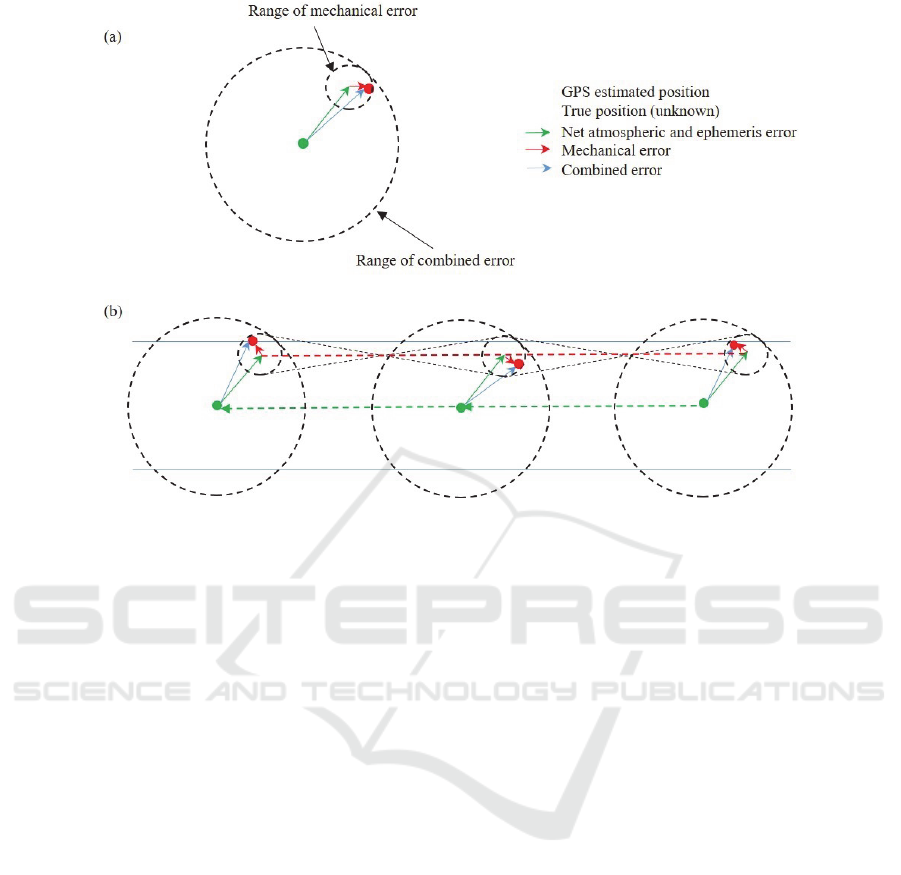
Figure 1: Conceptual GPS receiver error model of a single GPS receiver showing ranges of different GPS error types for (a)
a stationary vehicle at a single time instance and (b) a moving vehicle at three adjacent time instances.
the fact that the expected orbital positions of the
GPS satellites that the GPS receiver needs to
estimate its own position, could be different than
actual satellite positions. Atmospheric error, the
most significant portion of the combined GPS error,
is caused by atmospheric effects that cause the GPS
signal to bend while it travels through the
atmosphere. Of all three errors, mechanical error is
the only one that can vary randomly from one GPS
receiver to another at any given time. It can also
vary in the same GPS receiver with each subsequent
position estimate over time. On the other hand, both
ephemeris and atmospheric errors do not vary
significantly for multiple GPS receivers in close
geographical and temporal proximity. This is
because atmospheric disturbances will remain the
same over a wide geographical area and do not
rapidly change with time (J. Farrell, T. Givargis
2000, FHWA factsheet). Similarly, ephemeris error
will remain almost the same for the satellite
constellation used by GPS receivers in close
proximity to each other (Ahmed El-Rabbany 2002).
Theoretically, a GPS-estimated position can be
anywhere in the larger circle as shown in Figure 1a,
representing the range of combined GPS error.
However, after a GPS receiver gets locked to certain
satellites to estimate its position, its subsequent
position estimates will not randomly vary over the
entire large circle because atmospheric and
ephemeris errors will remain the same for a
considerable period of time. On the other hand,
mechanical error can randomly vary in every new
position estimate in any GPS receiver. The size of
mechanical error is comparatively much smaller
than the other two errors, which is highlighted by the
relative sizes of the two circles in Figure 1a.
Therefore, subsequent estimates of the same position
by a given GPS receiver will remain confined to a
smaller circle shown in the Figure 1a, representing
the range of mechanical error.
In addition to the three errors described above,
multipath error can significantly degrade the
position estimation accuracy for any GPS receiver.
Multipath error occurs when GPS signals arrive at
the receiver antenna through multiple paths as a
result of reflections from surrounding objects (e.g.,
high-rise buildings or overhead bridges) (T. Kos et
al. 2010). Multipath error is significant in urban
areas where a roadway is surrounded by high-rise
buildings. However, in rural and suburban areas,
multipath error can be negligibly small and the
significant errors are mechanical, ephemeris, and
atmospheric, as described above.
Figure 1a illustrated GPS receiver errors in static
conditions. When such a GPS receiver is placed in a
moving vehicle, it can be used to acquire a vehicle’s
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
244

trajectory by periodically estimating its position.
This concept is illustrated in Figure 1b, where three
adjacent GPS positions of a fast-moving vehicle on a
freeway (with minimal multipath error) are shown as
red dots. Each adjacent estimated position will vary
only within the small circle (the mechanical error
range) as opposed to randomly changing over the
larger circle because the atmospheric and ephemeris
errors will remain the same for each estimate.
Consequently, the trajectory obtained by the GPS
receiver may vary randomly, but the maximum
variations will be limited to the zigzag pattern
shown in Figure 1b. The mean trajectory obtained by
the GPS receiver (shown by the red dashed line) will
have an offset from the true trajectory (shown by the
green dashed line), but it will be a fixed offset and
its size will be determined by the magnitude of net
atmospheric and ephemeris error. Furthermore, the
variance of the trajectory obtained by the GPS
receiver will be determined by the magnitude of the
mechanical error of the GPS receiver, which is
generally small in size.
Similar to the trajectory of a single vehicle,
which can be obtained by a GPS receiver with a
small variance, the relative trajectories of multiple
vehicles in close proximity that have their own GPS
receivers can also be obtained with comparable
variances. Two practical scenarios involving
multiple vehicles—merging and changing lanes on
freeway—are depicted in Figure 2 (left side). In both
scenarios, the relative trajectories of surrounding
vehicles, if accurately known, can be beneficial in
the development of traffic safety applications. Using
the GPS error model described above, the relative
positions of three vehicles obtained by GPS
receivers are shown in Figure 2 (right side) at a
given time. The estimated GPS position of each
vehicle (shown by red dots) will have the same
offset from the true position because the net
atmospheric and ephemeris error remains the same
for all three vehicles—provided they are equipped
with GPS receivers of the same model. Therefore,
the relative distance between any two vehicles in
Figure 2: Concept of relative GPS accuracy: (a) Lane-merging scenario (b) Lane-changing scenario.
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution
245
both scenarios calculated from the estimated
positions of the GPS receivers on the two vehicles
will have a small variance determined by the
mechanical errors of the GPS receivers. An accurate
estimate of relative distance between any two
vehicles at a given time can lead toward an accurate
estimate of the relative trajectories of those vehicles
with respect to each other. The accuracy of the
relative trajectories needs to be high enough for use
in a potential safety application, such as a lane-
merge or lane-change-assist system, where it is
necessary to determine if a neighboring vehicle is in
the same or adjacent lane.
3 CHARACTERIZATION OF THE
GPS RELATIVE DISTANCE
ACCURACY
The relative trajectories of surrounding vehicles can
be obtained for any given vehicle on the road
provided it can receive the estimated GPS positions
of the neighboring vehicles. We used DSRC-based
V2V communication to exchange position
information among surrounding vehicles that had
standard GPS receivers, which allowed GPS position
data from neighboring vehicles to be processed in
any vehicle to obtain relative trajectories.
Before conducting field tests to obtain relative
trajectories of multiple vehicles on the road, the
relative distance accuracy of the standard GPS
receivers built in to the DSRC devices needed to be
characterized to determine if it is sufficient to
distinguish the neighboring vehicles in the same or
adjacent lanes. Therefore, we statistically
characterized the relative distance accuracy of the
GPS receivers built in to the DSRC devices and later
used the same devices to acquire the relative
trajectories of multiple vehicles using DSRC-based
V2V communication. The built-in GPS receivers use
a UBlox LEA-6 chipset, which is specified as having
a ± 2m absolute position accuracy with 50 percent
circular error probability (CEP). Using these GPS
receivers, we have been able to achieve the relative
distance accuracy of ± 0.5m with 95 percent CEP in
our field tests.
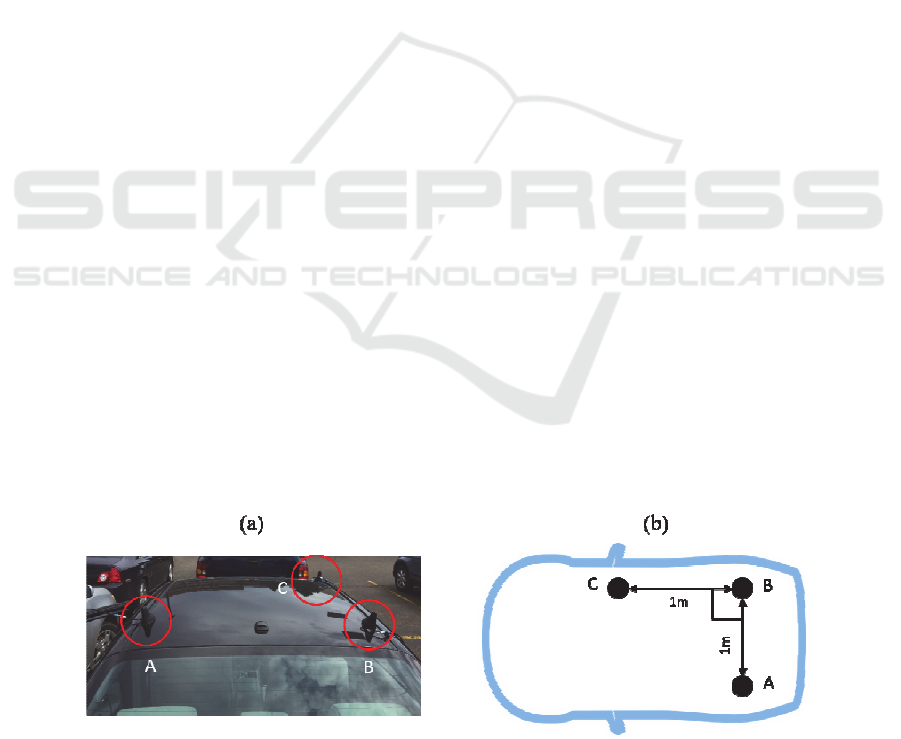
We conducted field tests to statistically evaluate
the accuracy of the relative distance obtained by the
built-in GPS receivers of the DSRC devices. We
installed antennas for three DSRC devices on top of
one vehicle at locations A, B, and C, as shown in
Figure 3. A top view of the vehicle used for the field
tests is shown in Figure 3a, and Figure 3b is a top-
view schematic of the vehicle showing the three
antenna locations (A, B, and C). The three locations
formed a right-angle triangle with two shorter legs
of length 1m each. We drove the equipped vehicle
on I-35 near Duluth, MN, in a round trip between
exit #239 and #242 at a speed of about 70 MPH
(speed limit) while continuously acquiring GPS
position data in all three devices at the rate of 10 Hz.
We repeated the round trip six times, exchanging
the positions of the antennas at locations A, B, and C
after each trip and using all six possible
permutations of the three devices. Each round trip
produced three distinct sets of acquired GPS
positions (one for each GPS receiver at location A,
B and C) in terms of longitude and latitude at
distinct time intervals synchronized with the GPS
satellite time. There were more than 12,000 GPS
points in each of the three sets of data (i.e., a net 20
minutes’ worth of data with 10 Hz GPS acquisition
rate). We then processed the data from all three
DSRC devices to calculate three distances (AB, BC,
and AC) for each set of three GPS points acquired at
the same time because the clock of each GPS
Figure 3: The top view of the vehicle used for the field tests with (a) pictorial view and (b) schematic view, showing three
installed antennas and their relative locations.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
246

Figure 4: Average calculated distances of segments AB, BC, and AC. The histogram of each segment length is shown
beside the segment. The average angle ∠ABC is 87.8 degrees.
receiver was synchronized with the GPS satellite.
The calculated average distances of AB, BC, and
AC were 1.15, 1.16, and 1.6m, with standard
deviations of 0.21, 0.20, and 0.24m, respectively, as
shown in Figure 4. The calculated average distances
of AB, BC, and AC are shown in Figure 4 where a
circle with a 0.25m radius is drawn at each location
(A, B, and C) to indicate the spread of the calculated
relative distance because the standard deviation of
each calculated distance is less than 0.25m. The
variation of the relative distances of AB, BC, and
AC is within ± 0.5m most of the time (>95%), as
illustrated in the histogram of each segment in
Figure 4. Furthermore, the histograms show that the
maximum spread of each relative distance is within
a ± 0.6m limit (1.2m total spread), which is still less
than half of the lane width, and therefore, is
sufficient to differentiate vehicles on adjacent lanes.
Although the specified absolute position
accuracy of each GPS receiver used was ± 2m with
50 percent CEP, the relative position accuracy
between any two GPS receivers was much improved
because the net ephemeris and atmospheric error in
absolute position was similar in all three GPS
receivers and was therefore cancelled out in the
relative distance calculation.
In our approach to characterize relative distance
accuracy, we used standard GPS receivers of the
same hardware and firmware model. This was
necessary because the post processing of the GPS
signal may vary among different GPS chips being
used on different DSRC devices. The processing
Figure 5: (a) The schematic diagram of calculated headings of the two GPS receivers at locations A and B, and (b) the
histogram of the differential heading.
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution
247
algorithm may also be different among different
versions of firmware on the same kind of GPS chip.
Furthermore, the GPS receiver’s field of view is
wide enough to receive signals from more than three
or four GPS satellites, which is the minimum
number of satellites required for two-dimensional or
three-dimensional position calculation, respectively.
In such scenarios, unless the post-processing
algorithm of multiple GPS receivers is designed to
lock to the same set of satellites, it is not guaranteed
that the atmospheric and ephemeris errors will
remain the same in each GPS receiver—thereby
adversely affecting the relative distance accuracy.
We experienced this phenomenon only twice during
our early field tests when the offset of at least one of
the three GPS receivers used was different from the
others, indicating that this particular GPS receiver
locked to a different set of satellites. In the built-in
GPS receivers of our DSRC devices, we did not
have any access to modify the GPS receiver
firmware to make it lock to a particular set of
satellites. However, we did not experience this
phenomenon in any of our subsequent field tests,
including the tests described in this paper.
We also evaluated the directional accuracy for
each of the GPS receivers in this field test. We took
two consecutive GPS positions (100msec apart in
time) for each of the two GPS receivers at locations
A and B and calculated individual headings for both,
as shown in Figure 5a. Figure 5b shows the
histogram of difference in headings of the GPS
receivers at positions A and B for all available data
points, covering six possible pairs of three distinct
GPS receivers at two locations (A and B). The
average and standard deviation of the differential
heading is -0.003 degrees and 0.26 degrees,
respectively. Both GPS receivers were traveling in
the same direction, so the differential heading was
expected to be zero. The results show that a standard
GPS receiver can estimate the direction of travel
with an accuracy of a quarter of a degree which is
sufficient for use in a safety application e.g., a lane-
change or merge-assist application. This is because
a quarter of a degree mismatch between the actual
and expected direction of travel of a vehicle
traveling at 60 MPH will cause a displacement error
of about 11cm in its expected position after one
second.
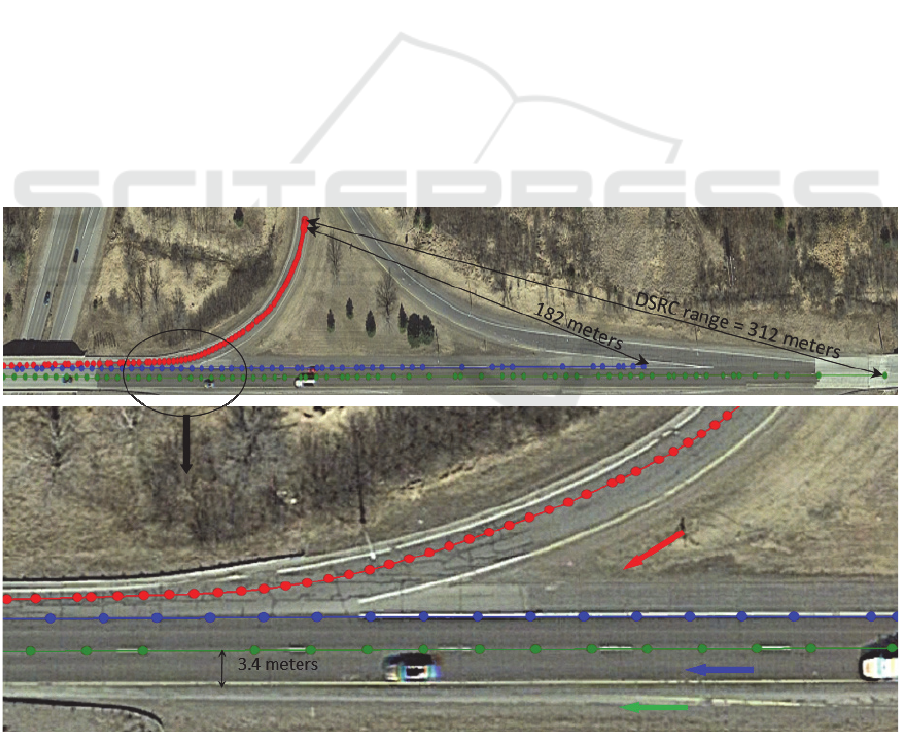
Figure 6: A typical scenario from field tests showing relative trajectories of three vehicles around a merge junction of a two
lane freeway (I-35). The lower part of the Figure is the zoomed version of a smaller area in upper part showing accuracy of
the acquired relative trajectories.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
248

4 RELATIVE TRAJECTORY
ACQUISITION USING DSRC-
BASED V2V
COMMUNICATION
After statistically characterizing the relative distance
accuracy for the built-in GPS receivers of the DSRC
devices, we acquired relative trajectories of multiple
vehicles using DSRC-based V2V communication.
We installed three DSRC devices with built-in GPS
receivers on three separate vehicles that were
programmed to transmit and receive DSRC-based
Basic Safety Messages (BSMs). Using those
vehicles, we conducted field tests to demonstrate the
acquisition of accurate relative vehicle trajectories
traveling in different lanes.
We conducted the field tests around Exit #239
on I-35 in Duluth, MN, which is a two-lane freeway.
One of the vehicles waited on the entrance ramp of
Exit #239 to merge on the freeway while the other
two vehicles travelled on the freeway toward the
merging junction on two separate but adjacent lanes.
When the two vehicles approached the merging
junction, the vehicle waiting at the entrance ramp
started to receive DSRC messages from the vehicles
on the main freeway. Upon receiving the first
message, the vehicle started to move and merged
onto the freeway while continuing to receive DSRC
messages from the two vehicles on the main
freeway. The vehicle on the entrance ramp logged
all of the received DSRC messages. This data was
later analyzed to obtain relative trajectories of all
three vehicles. We repeated the tests at least 12
times; each time, the acquired relative trajectories of
the vehicles were accurate enough to identify each
vehicle in its own lane.
One typical scenario of the field tests is shown in
Figure 6, where the acquired relative trajectories of
three vehicles are drawn in three different colors: red
for the vehicle traveling on the entrance ramp and
blue and green for the vehicles traveling on the main
freeway in two adjacent lanes. The relative
trajectories are superimposed onto Google Maps to
establish a frame of reference. A zoomed-in version
of the relative trajectories near the merge junction is
also shown in Figure 6, illustrating that lane-level
accuracy can be achieved using the built-in standard
GPS receivers of the DSRC devices.
To measure the range of the V2V
communication during the field tests, we calculated
the distance between the vehicles on the main
freeway and the vehicle on the entrance ramp when
that vehicle received the first DSRC messages from
each of the two vehicles on the main freeway. The
measured DSRC ranges for the DSRC devices on
the two vehicles in the test scenario of Figure 6 were
182 and 312m, respectively. In the rest of the tests,
the DSRC range typically varied between 200–
300m. The specified DSRC range is >500m (D.
Jiang 2006) when a clear line of sight is available,
but the actual achieved range (200 – 300m) was
reduced due to some natural growth around the
merge junction that caused some loss of signal
strength.
Although the relative trajectories obtained in the
field tests have lane-level accuracy, these trajectories
were obtained by post-processing GPS data acquired
through DSRC-based V2V communication during
the field tests. In the future, we plan to integrate the
post-processing algorithm within the DSRC device
of the vehicle on the merging ramp to acquire the
relative trajectories in real time. Using the real-time
trajectories, speed, and direction of travel
information from the relevant vehicles, we can
estimate a safe merge time cushion that could
potentially be used as an important parameter to
develop a merge-assist application.
We define the merge time cushion as the time it
will take for a vehicle in the rightmost lane of the
freeway to arrive at the merging junction after the
vehicle on the entrance ramp has received the first
BSM from this vehicle. The merge time cushion for
the field test result of Figure 6 was estimated to be
between 9 and 10 seconds, as illustrated in Figure 7,
Figure 7: A field test scenario showing the relative trajectories of three vehicles with time stamps.
t=0s
t=5s
t=7s
t=9s
t=10s
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution
249

where yellow lines represent the relative positions of
all three vehicles at a given time. The time stamp t =
0s in Figure 7 indicates the time when the merging
vehicle received the first BSM from the vehicle in
the rightmost lane of the freeway. Similarly, the time
stamp t = 9s indicates the time when the vehicle in
the rightmost lane of the main freeway arrives at the
merging junction, giving the merging vehicle a
merge time cushion of 9 seconds.
5 CONCLUSIONS
In this paper, we have presented a simple approach
to acquire accurate relative trajectories of
surrounding vehicles using standard GPS receivers
and DSRC-based V2V communication. Using this
approach, we have demonstrated that relative
trajectories of the surrounding vehicles can be
achieved with lane-level resolution. We conducted
field tests to successfully acquire the relative
trajectories of vehicles traveling on multiple lanes
toward a merging junction with sufficient accuracy
to distinguish two vehicles on separate or adjacent
lanes of a multiple-lane freeway. However, we
obtained the relative trajectories by post-processing
GPS data acquired through DSRC-based V2V
communication during our field tests. In the future,
we plan to integrate the post-processing algorithm
within the DSRC device of the vehicle to acquire the
relative trajectories in real time.
ACKNOWLEDGEMENTS
The authors wish to acknowledge those who made
this research possible. The study was funded by the
Roadway Safety Institute, the University
Transportation Center for USDOT Region 5, which
includes Minnesota, Illinois, Indiana, Michigan,
Ohio, and Wisconsin. Financial support was
provided by the United States Department of
Transportation’s Office of the Assistant Secretary
for Research and Technology (OST–R).
REFERENCES
Intelligent Transportation Systems - DSRC: The Future of
Safer Driving Fact Sheet. 2017. Intelligent
Transportation Systems - DSRC: The Future of Safer
Driving Fact Sheet. [ONLINE] Available at:
http://www.its.dot.gov/factsheets/dsrc_factsheet.htm.
[Accessed 23 February 2017].
Intelligent Transportation Systems. 2017. Connected
Vehicle Challenges: Potential Impact of Sharing the
5.9 GHZ Wireless Spectrum. [ONLINE] Available at:
Http://www.its.dot.gov/cv_basics/pdf/CV_basics_DS
RC_factsheet.pdf. [Accessed 23 February 2017].
Harding, J., Powell, G., R., Yoon, R., Fikentscher, J.,
Doyle, C., Sade, D., Lukuc, M., Simons, J., & Wang,
J. (2014, August). Vehicle-to-vehicle communications:
Readiness of V2V technology for application. (Report
No. DOT HS 812 014). Washington, DC: National
Highway Traffic Safety Administration.
U.S. Department of Transportation. 2017. Vehicle to
Vehicle Communication Fact Sheet National Highway
Traffic Safety Administration, US Department of
Transportation. [ONLINE] Available at:
Http://www.nhtsa.gov/pdf/v2v_fact_sheet-
02032014.pdf. [Accessed 23 February 2017].
D. Jie and M. J. Barth, 2008. Next-generation automated
vehicle location systems: Positioning at the lane level,
IEEE Trans. Intell. Transp. Syst., vol. 9, no. 1, pp. 48-
57, 2008.
S. Ammoun, F. Nashashibi and C. Laurgeau, 2007, An
analysis of the lane changing manoeuvre on roads: The
contribution of inter-vehicle cooperation via
communication, IEEE Intelligent Vehicles Symposium
pp. 1095-1100, June 2007.
D. Desiraju, T. Chantem. K. Heaslip, 2015. Minimizing
the Disruption of Traffic Flow of Automated Vehicles
During Lane Changes", Intelligent Transportation
Systems, IEEE Transactions, pp. 1249 - 1258 Volume:
16, Issue: 3, June 2015.
A.T. McCartt et al., 2004. Types and characteristics of
ramp-related motor vehicle crashes on urban interstate
roadways in Northern Virginia”, Journal of Safety
Research, vol.35, 2004, pp. 107- 114.
Bruce N. Janson, Wael Awad, Juan Robles, Jake
Kononov, Brian Pinkerton, 1998. Truck Accidents at
Freeway Ramps: Data Analysis and High-Risk Site
Identification, Journal of Transportation and Statistics,
January 1998, pp. 75 – 92.
Basav Sen, John D. Smith, and Wassim G. Najm. 2003.
Analysis of Lane Change Crashes. DOT-VNTSC-
NHTSA-02-03 DOT HS 809 571, March 2003.
G. M. Fitch, S. E. Lee, S. Klauer, J. Hankey, J. Sudweeks,
and T. Dingus, 2009. Analysis of Lane-Change
Crashes and Near-Crashes DOT HS 811 147, June
2009.
National Highway Traffic Safety Administration. 2008.
National Motor Vehicle Crash Causation Survey:
Report to Congress. DOT HS 811 059, July 2008.
D Chun; K, Stol., 2012. Vehicle motion estimation using
low-cost optical flow and sensor fusion, Mechatronics
and Machine Vision in Practice (M2VIP), 2012 19th
International Conference, pp. 507 - 512, Nov. 2012.
Abdelfatah, W.F., et al., 2011. "2D Mobile multi-sensor
navigation system realization using FPGA-based
embedded processors," Canadian Conference on
Electrical and Computer Engineering (CCECE), 2011,
pp. 1218-1221.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
250

Qingquan Li et al., 2014. A Sensor-Fusion Drivable-
Region and Lane-Detection System for Autonomous
Vehicle Navigation in Challenging Road Scenarios,
Vehicular Technology, IEEE Transactions on,
Volume: 63, Issue: 2, pp. 540 – 555, Feb. 2014.
H. Zhao, M. Chiba, R. Shibasaki, X. Shao, J. Cui and H.
Zha, 2009. A laser-scanner-based approach toward
driving safety and traffic data collection, IEEE Trans.
Intell. Transp. Syst., vol. 10, no. 3, pp. 534-546, 2009.
A. Bansal, H. Badino and D. Huber, 2014. Understanding
how camera configuration and environmental
conditions affect appearance-based localization,
Intelligent Vehicles Symposium Proceedings (IV),
2014 IEEE, pp. 800-807.
R. Toledo-Moreo, M. A. Zamora-Izquierdo, B. Ubeda-
Minarro, and A. F. Gomez-Skarmeta, 2007. High-
integrity IMM-EKF-based road vehicle navigation
with low-cost GPS/SBAS/INS, IEEE Transaction on
Intelligent Transportation Systems., vol. 8, no. 3, pp.
491-511, Sep. 2007.
N. Mattern, R. Schubert, and G. Wanielik, 2010. High-
accurate vehicle localization using digital maps and
coherency images, in Proc. IEEE Intell. Vehicles
Symposium, La Jolla, CA, 2010, pp. 462–469.
R. G. García-García, M. A. Sotelo, I. Parra, D. Fernández,
and M. Gavilán, 2007. 3D visual odometry for GPS
navigation assistance, in Proc. IEEE Intell. Vehicles
Symposium, Istanbul, Turkey, 2007, pp. 444–449.
J. Juang; C. Lin., 2015. A Sensor Fusion Scheme for the
Estimation of Vehicular Speed and Heading Angle,
Vehicular Technology, IEEE Transactions on, pp.
2773 - 2782 Volume: 64, Issue: 7, July 2015.
S. Rezaei and R. Sengupta, 2007. “Kalman filter-based
integration of DGPS and vehicle sensors for
localization,” IEEE Trans. Control Syst. Technol., vol.
15, no. 6, pp. 1080–1088, Nov. 2007.
N. Alam, A. T. Balaei and A. G. Dempster, 2013. Relative
positioning enhancement in VANETs: A tight
integration approach", IEEE Trans. Intell. Transp.
Syst., vol. 14, no. 1, pp. 47-55, 2013.
J. Farrell, T. Givargis, 2000. Differential GPS Reference
Station Algorithm-design and Analysis. In IEEE
Transactions on Control Systems Technology, Vol. 8,
No. 3, May 2000, pp. 519-531.
High Accuracy-Nationwide Differential Global
Positioning System Program Fact Sheet - FHWA-RD-
03-039. 2017. High Accuracy-Nationwide Differential
Global Positioning System Program Fact Sheet -
FHWA-RD-03-039. [ONLINE] Available at:
https://www.fhwa.dot.gov/publications/research/operat
ions/03039/. [Accessed 23 February 2017].
William J. Hughes. July 2014. Federal Aviation
Administration, Global Positioning System (GPS)
Standard Positioning Service (SPS) Performance
Analysis Report #86 Technical Centre NSTB/WAAS
T&E Team.
D. K. Schrader, 2013. Combining Multiple, Inexpensive
GPS Receivers to Improve Accuracy and Reliability",
Sensors Applications Symposium (SAS), 2013 IEEE.
pp. 33-37.
R. B. Langley, 1997. GPS receiver system noise, GPS
World, vol. 8, no. 6, pp. 40–45, 1997.
Ahmed El-Rabbany, 2002. Introduction to GPS: The
Global Positioning System. 2002, pp.29.
T. Kos, I. Markezic and J. Pokrajcic, 2010. Effects of
multipath reception on GPS positioning performance,
ELMAR, 52nd International Symposium EL MAR-
2010, pp. 399-402.
D.Jiang, V.Taliwal, A.Meier and W. Holfelder, 2006.
Design of 5.9 GHz DSRC-based Vehicular Safety
Communication, IEEE Wireless Communications,
Vol. 13, No 5, October 2006, pp.36-43.
Acquisition of Relative Trajectories of Surrounding Vehicles using GPS and SRC based V2V Communication with Lane Level Resolution
251
