
Real World Examples of Agent based Decision Support Systems for Deep
Learning based on Complex Feed Forward Neural Networks
Harald R. Kisch and Claudia L. R. Motta
NCE, Universidade Federal do Rio de Janeiro, Av. Pedro Calmon, 550 - Cidade Universitria, Rio de Janeiro, Brazil
Keywords:
Deep Learning, Neural Network, Feed Forward, Muilti-agent, Complex Systems, Decision Support.
Abstract:
Nature frequently shows us phenomena that in many cases are not fully understood. To research these phe-
nomena we use approaches in computer simulations. This article presents a model based approach for the
simulation of human brain functions in order to create recurrent machine learning map fractals that enable
the investigation of any problem trained beforehand. On top of a neural network for which each neuron is
illustrated with biological capabilities like collection, association, operation, definition and transformation,
a thinking model for imagination and reasoning is exemplified in this research. This research illustrates the
technical complexity of our dual thinking process in a mathematical and computational way and describes
two examples, where an adaptive and self-regulating learning process was applied to real world examples.
In conclusion, this research exemplifies how a previously researched conceptual model (SLA process) can
be used for making progress to simulate the complex systematics of human thinking processes and gives an
overview of the next major steps for making progress on how artificial intelligence can be used to simulate
natural learning.
1 INTRODUCTION
Many of our technical innovations are inspired by na-
ture. Most of the things we categorize in biologi-
cal evolution, like how human brains works, are still
difficult to achieve with our current technical skills.
Backfiring introduced by Hebb, 1949 with ”Firing to-
gether, wired together” and nowadays called back-
propagation or Forward- or Reverse-mode differen-
tiation (Ochs et al., 2016), which means reducing
many neural network paths by finding and propa-
gating intermediate results that significantly reduce
path-reassemblings or different or additional path-
assimiliations (Krizhevsky et al., 2012). Recently, the
Forward-mode differentiation (tracking how one in-
put affects every node) and the Reverse-mode differ-
entiation (tracking how every node affects one out-
put) to mathematically evaluate derivatives were pre-
sented (Ochs et al., 2016). As an advantage of imple-
menting Reverse-mode differentiation it is possible to
get all the derivatives that produce the output network
streams with one single computation. This reduces
the computational costs of so called first-order opti-
mization algorithms within learning functions e.g. by
finding a local minimum or maximum. The other way
around, implementing Forward-mode differentiation
means getting all derivatives that produce the input
with one single computation. Thus, we can choose
the computation depending on which operation per-
forms better with respect to the input or output se-
quences. If there is a computation with a lot of out-
puts, the chain rule is to use Forward-mode differen-
tiation to create deep feedforeward neural networks.
If there is a computation with a lot of input, the chain
rule is to use Reverse-mode differentiation to create
neural networks, whose derivatives are flowing back-
wards through the model. The replacement of the lo-
gistic or the hidden networks is represented through
an analog value, which has its own input and output
gates that control when inputs are allowed to influ-
ence the output. These gates have their own learned
weights on connections and memories that are stored
in the previous step. In the past, it seemed unlikely
that an exact algorithm can be developed to perform
probabilistic inference efficiently over all classes of
belief networks (Cooper, 1990). However, 20 years
later the theory of discrete calculus was introduced
(Grady and Polimeni, 2010), showing that it can be
applied in many fields and disciplines by unifying
approaches for data analysis and content extraction.
These extractions can speed up the optimization of
neural networks by the amount of input or output se-
94
Kisch, H. and Motta, C.
Real World Examples of Agent based Decision Support Systems for Deep Learning based on Complex Feed Forward Neural Networks.
DOI: 10.5220/0006307000940101
In Proceedings of the 2nd International Conference on Complexity, Future Information Systems and Risk (COMPLEXIS 2017), pages 94-101
ISBN: 978-989-758-244-8
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

quences in recurrent neural network (RNN) streams.
This leads to a faster learning of long term depen-
dencies in Long Short Term Memory (LSTM) Re-
current Neural Networks (Le et al., 2015). Hinton
et. al (2015) also exemplifies the solution of some
challenging problems like sequence regression, pre-
sentation and performance increase on hidden layer
establishment at initialization time. Some examples
of this approach can also be found in handwriting
recognition (Graves et al., 2009), handwriting genera-
tion (Graves, 2013), speech recognition (Graves et al.,
2013), (Graves and Jaitly, 2014), machine translation
(Luong et al., 2014), (Bahdanau et al., 2014) and se-
quence to sequence mapping (Sutskever et al., 2014).
In this article, we use the theory of Dual Thinking
(Scheffer et al., 2015) as a meta model and combine
it with a previous work on a human thinking model
based on a neural network called the 6-Step Learn-
ing Adaption process (SLA) (Kisch and Motta, 2015).
The main idea of SLA is the step-wise, agent ori-
ented approach to collect, associate, operate, define,
store and transfom knowledge map fractals in a tool-
validated conceptual model.
2 METHODOLOGY
Many scientists consistently conclude that intuition
and reasoning is an essential part of our thinking pro-
cess (Scheffer et al., 2015). In relation to the SLA
process intuition can be realized by mapping gate-
associations, where gates are definitions of neuronal
sub-networks according to Sporns motifs (Sporns and
Koetter, 2004). On the other hand reasoning in
the SLA-Process are the operations on the defini-
tions of neural sub-networks which lead to definition-
increments into the overall learning map. Each map
fractal can span out the whole network from which it
was defined. Each node in the network saves the state
of any other node related to the definition. This means
the collection at the beginning, the associations, the
operations that were made and also the transformation
including the previously defined results and predic-
tions for the changes of the next transformation based
on the positive and negative feedback out of the prob-
ability testing network in a whole.
Notes: P = Product (Reasoning), T = Testing (Intu-
ition), nF = negative Feedback, pF = positive Feed-
back, G
T
= Testing-Gate, G
P
= Product Gate, D
∗
=
Current Definition
With both processes for reasoning and testing com-
bined, there are some feedback-networks with posi-
tive and negative feedback on the actual thinking pro-
cess called negative Feedback (nF) and positive Feed-
Figure 1: Dual Thinking.
Figure 2: Dual Thinking Layer.
back (pF) as shown in Figure 1 in the center of the
top and of the bottom circle, respectively. Negative
feedback (nF) happens primarily in the Intuition-Test
Neuronal Network (T ) and pF happens primarily in
the Reasoning-Neural Network (P) as shown in Fig-
ure 1 on the top circle and on the bottom circle. Feed-
back is the definition of a previous match of associ-
ations and can be positive (many matches) or nega-
tive (no matches). The feedback of many neural net-
works in this approach is generally stored as result
and used to reach group consensus according to Liao
and Ji (Liao and Ji, 2014).
3 RESULT
Many approaches, which are used to mathematically
describe group consensus (Ji et al., 2014) in neural
networks need many restrictions because they cannot
be applied directly to real world szenarios. This is
why the formalization approach in this article is a gen-
eral overview to explain the conceptual layer model
of figure 1. In the following, the formalization of the
Dual Thinking process illustrated in Figure 1 and 2
is conceptional formalized in general and meant to be
used in big data computation scenarios.
Real World Examples of Agent based Decision Support Systems for Deep Learning based on Complex Feed Forward Neural Networks
95

Implementation Setup Formalization.
AT T := JSON ∈ {Array, Function, Ob ject} (1)
Spec := Ob ject ∈ {key : value} (2)
DOC :=
∞
[
n=1
AT T + Spec + Rev# (3)
DB :=
∞
[
n=1
DOC (4)
N :=
∞
[
n=1
DB (5)
Note: ATT = Attachment, Spec = Specification, DOC
= Document, DB = Database, N = Node, Rev# =
unique revision number, which is used to build a
concurrent versioning of any knowledge map frac-
tal. This is mandatory for the transformation step in
the SLA process to extract resonances of positive and
negative feedback (explained later on) without having
to change the knowledge at all. On negative feedback
for example, the state of the best feedback resonance
will be recovered using the saved Rev#.
Model Formalization.
NN :=
∞
[
n=1
N (6)
M :=
∞
[
n=1
NN (7)
G :=
∞
[
n=1
M (8)
D :=
∞
[
n=1
G (9)
S :=
∞
[
n=1
D (10)
Note: NN = Neural Network, M = Motif, G = Gate,
D = Definition, S = Stack item
The stack S is saved in every node N to span out the
whole NN to further recure the inputs leading to the
definition D. We can say that a reverse function which
returns all the inputs I of a neural network is defined
as following:
I = f (S
G
D
) → NN
G
∪ D
G
(11)
The other way around, the reverse function D
∗
G
is the
weighted conjunction between G
∗
T
and G
∗
P
producing
the Output O and can defined as:
O = f (G
T
∪ G
P
) → D
∗
(12)
Any NN consist of a testing network T which repre-
sents the imagination part of our thoughts and a pro-
ducing network P which represents the reasoning part
of our thoughts. The conclusions (definitions D ) of T
and P together are saved in hidden feedback networks
nF and pF .
nF = f (NN
T
) → O(G
T
);NN
T
, G
T
∈ D
∗
(13)
pF = f (NN
P
) → O(G
P
);NN
P
, G
P
∈ D
∗
(14)
Figure 1 illustrates (11) to (14). In this illustration,
each circle is meant to be a neural network or a part
of a neural network Motif (Sporns and Koetter, 2004)
itself. The Sequences S1 to S4 executes the Sequence
functions s
1
and s
2
as following:
S1 := f (T ) ∈ s
1
(15)
S2 := f (P) ∈ s
1
(16)
S3 := f (G
T
) ∈ s
2
(17)
S4 := f (G
P
) ∈ s
2
(18)
Sequences S1 to S4 in figure 1 are followed by se-
quences s
1
and s
2
, which can be defined as following:
s
1
:= f (T ) ∪ f (P); T, P ∈ D
∗
(19)
s
2
:= f (G
T
) ∪ f (G
P
);G
T
, G
P
∈ D
∗
(20)
The feedback functions nF and pF are defined as fol-
lowing where nF is meant to be the negative part and
pF the positive part of the feedback:
nF := f (T ) ∪ f (G
T
);T, G
T
∈ D
∗
(21)
pF := f (P) ∪ f (G
P
);P, G
P
∈ D
∗
(22)
The feedback functions conclude, that the following
definition D
n
is a neural network NN of positive in-
puts I
P
out of the current network M
∗
transformed
by the test network T , producing products P of pos-
itive feedback gates nF(G
P
) in disjunction with all
negative feedback gates nF(G
T
), so that the resulting
function for the next definition can be used as follow-
ing:
D
n
:= M
∗
n
∏
I
P
=1
T
pF(G
P
) ∩ nF(G
T
)
;I
P
∈ T ( f (S
G
D
))
(23)
COMPLEXIS 2017 - 2nd International Conference on Complexity, Future Information Systems and Risk
96

In most cases a complex problem needs an appro-
priate environment, in which the problem can be
solved. This environment needs training on the spec-
ified inputs as well as a finishing condition with de-
fined dropouts to prevent overfitting (Srivastava et al.,
2014).
4 DIFFERENCE TO TYPICAL
NEURAL NETWORK DESIGN
Research in the area of neural brain functions already
started centuries ago i.e. with the probabalistic model
of a perceptron (Rosenblatt, 1958). Rosenblatt cre-
ated the fundament on which Feed-Foreward neural
Networks (FFNN) are based. In general, they are
based on learned datasets of what is wanted to have
coming out of the network. This is also called super-
vised learning (Jordan and Rumelhart, 1992).
On the other hand, unsupervised learning is com-
monly understood as putting inputs into the network
and let the network fill out the missing parts based
on what was previously trained (Hofmann, 2001).
Boltzmann machines (Hinton and Sejnowski, 1986),
Markov chains (Kani and Ardehali, 2011) and Hop-
field networks (Hopfield, 1982) are more similar to
the SLA model because each node is related to all
other nodes and also some basic responsibilities are
defined such as input, output and restrictions to some
nodes but not all of them like in the SLA model. Any
of the mentioned conceptual models and also other
more modern Encoders (Gregor et al., 2015) are all
based on the inputs and the expected outcome. This
is the main difference to the SLA process. The SLA
model processes each constellation of the network
without an expected outcome. It transforms the net-
work into domain clusters to get outcomes related to
specific universals which are taxonomy-based signif-
icant to the provided inputs and of course take any
changing aspect into account by the transformation
step and relate it to all of the other aspects in a prob-
abalistic way during the association step of the SLA
processing chain.
5 APPLICATION TO REAL
WORLD EXAMPLES
The SLA process was tested in two different envi-
ronments. First, it was tested if it can produce rele-
vant outputs in form of recommendations in the field
of technical mechanics and integrated circuit parts of
the public transport industry. The second environ-
ment, football game predictions, was selected to be
a completely different context compared to the first
simulation. The inputs and training data as well as
the output of the second simulation was selected to
be completely different. Football game predictions
were considered as being easier to adapt and to test
and are easier to understand than technical concepts
in the mechanical and electronical industry.
5.1 Automatically Finding Obsolescence
Management Solutions
According to Bartels (Bartels, 2012), integrated cir-
cuits and electronical parts are obsolete if the industry
is not able to have them delivered anymore or they are
not needed anymore e.g. because of law restrictions
or technological evolution. Many railway companies
have the same problems and need to find a way to re-
place obsolete parts to keep public transport operable
longer then estimated without obsolescence manage-
ment. At this point, obsolescence management fo-
cuses on the lifetime extension of any kind of techni-
cal construction.
Simulation design I.
For the communication between railway companies
on the subject of obsolescence management, an inter-
net platform has been developed. Currently about 50
people from 20 different railway companies commu-
nicate on different obsolescence management tasks
through the platform every day. Figure 3 shows how
the obsolescence cases have grown over time. Im-
portant to know is that the cases come from different
modes of transportation e.g. trains, metro, tram, bus.
Focusing all modes of transportation simultaneously
is useful because parts and internal components can
be identical across different modes of transportation,
e.g. train, bus, metro, etc. However, the aim of the
SLA process in this area is to predict which parts can
be replaced with a commonly accepted solution au-
tomatically at the time a new obsolescence case was
entered. Entered cases are saved according to the in-
ternational system of railway labeling EN 15380-2,
thus the matching algorithm can learn based on in-
ternational standard input sequences provided by user
inputs. The procedure of doing obsolescence manage-
ment is also conform with the international standard
DIN EN 62402. This enables the algorithms to ana-
lyze user behavior and learn which recommendations
are most relevant to the user at a specific time point.
Methods applied I.
To accomplish the main tasks in this area the learn-
ing algorithm learns from user inputs and produced
Real World Examples of Agent based Decision Support Systems for Deep Learning based on Complex Feed Forward Neural Networks
97
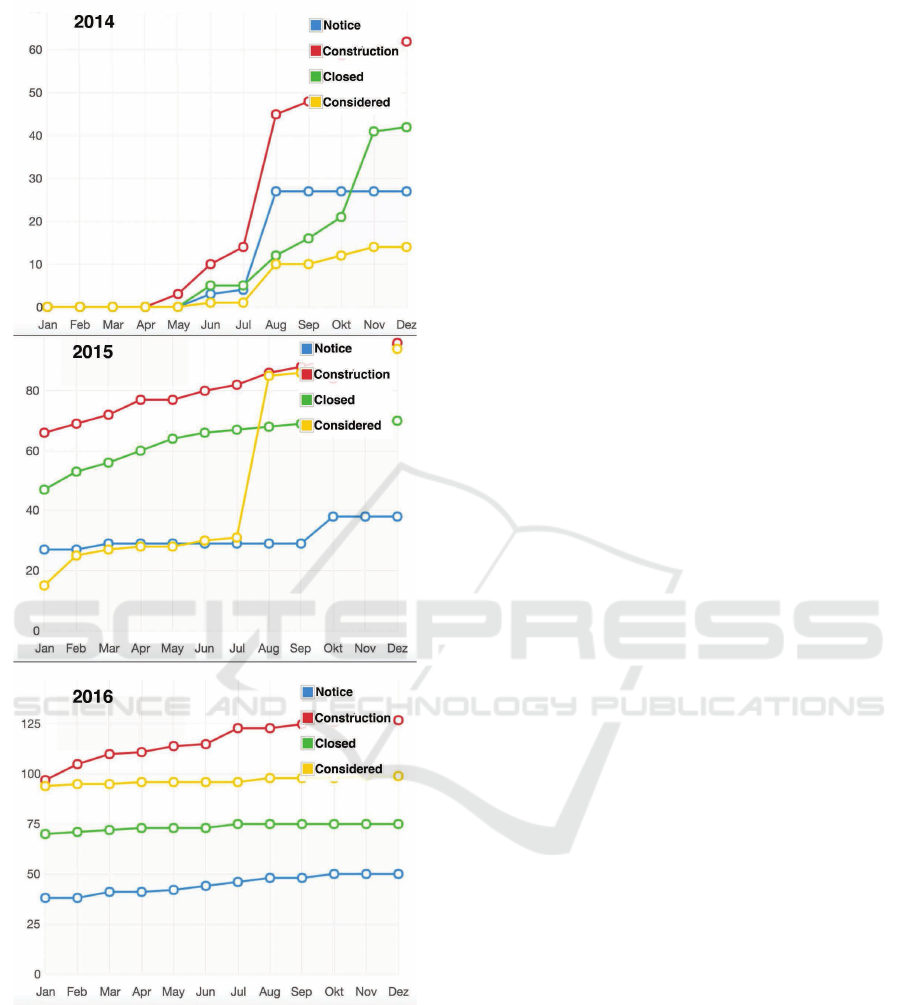
Figure 3: Obsolescence Management Data Growth.
data entered by the user or generated through the SLA
process for a specific environment or product fam-
ily. If the user enters a complete obsolescence case
with its solution included, the SLA process searches
for similarities between different other obsolescence
cases and matched versions, part numbers and other
criteria applicable for the identification, location and
the specific environment of a given part at collection
time. The association step binds all collected items
together into environments or product families in or-
der to operate on them in the next step. At operation
time each of the associations were mapped to different
specific patterns previously stored and related to the
specified product families and component interfaces.
If nothing was found, the collections and associations
are transformed using positive and negative feedback
loop algorithms combined with possibly missing data
to force a pattern match. Otherwise if something sig-
nificant were found, the grade of relevance for the so-
lution gets stored for further usage in next iterations.
Results I.
The simulation has shown that in the field of obso-
lescence management the SLA process was less use-
ful in the specified area of component part mappings.
We figured out that we can make good suggestions to
the user which components could fit together, unfor-
tunately there was not enough data to work on rele-
vant pattern matching. We have not been able to con-
struct as much relevant data across the different rail-
way environment and product families to get signifi-
cant mapping patterns which are pointing on solutions
the industry can use in practice. The most difficult
area of transforming and operating data was the in-
compatible design of integrated components. At con-
struction time constructors did not consider the com-
patibility across the interfaces of other, mostly com-
petitive integrated circuits or mechanical components
of other railway or public transportation vehicle part
creators. This kind of investigation seems to have
much better results if creators are forced to design
compatible interfaces by governance, law or interna-
tional standards.
5.2 Football Game Prediction
Another approach for SLA process application is the
area of football game statistics to predict a football
teams performance compared to other football teams
during an official football match across nearly 60 dif-
ferent leagues around the world. This simulation was
selected out of many different options because of the
grade of difference to the study previously described,
to test the applicability of the SLA process for differ-
ent fields of data computation and different kind of
predictions or expected outcomes.
Simulation Design II.
The statistical baseline for game predictions of the
last three football seasons in the learning part of the
SLA process was retrieved from a public available
database via http://www.sofascore.com (Sofa). The
Application Programming Interface (API) of Sofa
COMPLEXIS 2017 - 2nd International Conference on Complexity, Future Information Systems and Risk
98

Figure 4: Bet Filtering.
provides all relevant data e.g. on matches, scores,
teams and players of several football leagues. The
SLA Model was designed to work in the same way as
a professional football expert would bet. Building up
domains for leagues, teams, and regional history, then
collecting data about past game results of the com-
peting teams (Step 1 Collection), players, judges and
observing the motivation regarding the current league
rank of relevant teams. Operations (Step 3 Operation)
have been applied to calculate a player score for each
possible team formation during the match (Step 2 As-
sociation). Each constellation was saved (Step 5 Stor-
age) as a relevant team score (Step 4 Definition) and
was initiated as an own transformable network (Step 6
Transformation). Any relevant information was then
calculated for each of the possible team formations
to calculate a player score for each player in differ-
ent field positions and their relevant opponents in the
attack-, middle-, and defense-field. The results have
been saved in a meta network in which all predictions
for one football match have been placed. Any constel-
lation of the variables did predict a specific chance of
competing the opponent in a simple value based on
randomly generated data for the specific match situa-
tions the players usually have.
Methods applied II.
To predict which team will win in a specific football
match, different methods have been applied. The pre-
diction which team will win was interpreted out of
a percentage rate of consensus for each of the meta
network values and generated data on which they are
based on. The illustration in Figure 4 shows accepted
bets and bets which have been filtered out because
they did not match the createria to have more than
80% meta network consensus in a rising amount of
different team constellations and in-match player sit-
uations. Predictions cannot be placed if the relevant
data is not available. Usually the player formation
data is available 30 minutes before the game starts.
An automated algorithm extracts the data from Sofa
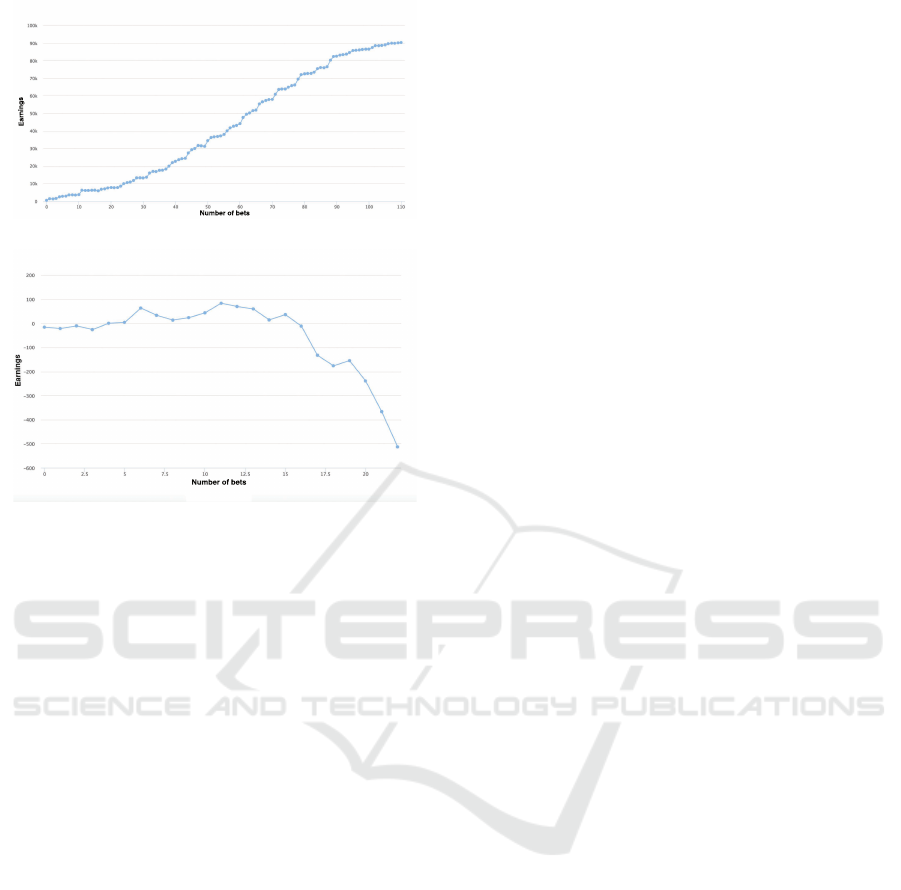
Figure 5: Bet Quote Results.
and hands it over it to the SLA System. Within sec-
onds it is calculated if the bet is filtered out or will
enter the betting queue. There are three options for
placing a bet as illustrated in Figure 5. The SLA Sys-
tem was learned to find out the best betting option on
a previously calculated range based on the Gaussian
bell curve concerning the bet quotes, player and team
constitution as well as different approaches to reduce
wrong predictions because of outlying values. A bet
was always only placed if all meta networks gave a
consensus of at least 80%, otherwise the bet for the
match was rejected. Initial simulations indicated un-
reliable predictions, extrem outliers or many missing
data which is why for several leagues it was decided
not to bet at all.
Results II.
Figure 7 shows how the simulation did predict a con-
crete income for a comparable low amount of possi-
ble bets at a computational low risk. The discrepancy
between theory and practice regarding football game
predictions, based on the SLA algorithm learned on
real seasonal data from the past, becomes clear when
comparing to the bet reality illustrated in Figure 6,
where earnings decrease with increasing number of
bets. Thus, football game predictions are harder to
predict if they come from complex automated algo-
rithms. The analysis of the outcomes has shown that
there were huge amounts of football matches where,
according to the statistics, stronger teams lost the
match. Compared to the Obsolescence Management
study, the main differences are the reliability and the
amount of patterns found. In football game predic-
tions there where significantly less patterns found and
these where also less reliable compared to the area of
recommendation engines in the field of public trans-
portation technology.
6 DISCUSSION
Analytical Data Processing for recommender sys-
tems (Manouselis et al., 2011) like those systems de-
veloped for e-commerce decision making (Kim and
Srivastava, 2007) or machine translation (Bahdanau
et al., 2014) or acustical noice reduction (Srivastava
Real World Examples of Agent based Decision Support Systems for Deep Learning based on Complex Feed Forward Neural Networks
99
Number of bets
Earnings
Figure 6: Bet Simulation.
Number of bets
Figure 7: Bet Reality.
et al., 2014) already use machine learning algorithms
based on neural networks. They are all extremely spe-
cialized and cannot be used in other environments as
they have been made for. Ubiquitous computing or
at least the Social Internet of Things (SIoT) (Atzori
et al., 2012) will hold many autonomous complex
systems with its own business logics and their own
intelligence in a peer-to-peer environment of similar
autonomous systems sharing information all together
in different environments. Environments change very
fast or need to cover unpredictable changes. Any ma-
chine learning process should be able to learn from
the inputs and outcomes and thus to reconfigure them-
selves to be able to react on unexpected environmen-
tal changes. In comparison to other research, the SLA
process, based on biological neuron functions is sim-
ilar to the approaches of combining artificial intelli-
gence with widely approved biological and chemical
processes like DNA Sequencing (Ezziane, 2006) or
the classification of protein structures (Suhrer et al.,
2009) as both approaches extract knowledge from an
enormous amount of data. Further investigations are
necessary to also cover following aspects:
First, the ”State of Mind” concept, how different
Neuronal Networks can be used to represent some-
thing similar to the ”state of the mind” for a specific
recognition or the polarity between sentiments (Po-
ria et al., 2014). Second, ”Priming” concept, how
the element association can be marked as complete,
abstract, stable or has a significant convergence to a
specific state defined previously of being important
for the current reasoning process based on the con-
sensus of positive and negative feedback loops.
Third, ”Balancing” concept between positive and
negative feedback (nF <> pF) to store a specific defi-
nition (D) for later use. Fourth, theoretical complexity
and performance through efficient cache, transience
and garbage collection models are not focused yet.
Last, ”Avoiding” concept in order to shrink, expand or
test the neural networks in order to rise effectiveness
of the learning function (e.g. reducing errors faster)
(Srivastava et al., 2014).
7 CONCLUSION
The combination of both, the SLA and the Dual
Thinking process was considered to be a good fit
for making progress in simulating human thinking
processes for technology enhanced learning in the-
ory. But both of the studies exemplified in this paper
show that something of higher significance is missing
to compare computational simulation processes, like
SLA with natural learning. Machine learning algo-
rithms, especially in the manner of imagination and
reasoning, will improve many modern life scenarios
in the near future. Decision making based on the be-
havioral history of complex environments like in the
SLA process could take a significant part of it. These
decision making processes definitely need further in-
vestigation and deeper statistical analysis for positive
and negative feedback relevances. The level of sig-
nificance need to be saved in the knowledge map as
well. Only in this way it is possible to know the share
of a knowledge map fractal on the decision making
process. This enables change prediction in the trans-
formation processing step and could lead to more ef-
ficient conclusions. It seems there exists a necessity
for statistical baselines and standardized taxonomy in
each knowledge transformation step. Operations, se-
lections, associations and transformations should be
based on statistical data analysis and need more data
as used in both approaches exemplified in this re-
search.
REFERENCES
Atzori, L., Iera, A., Morabito, G., and Nitti, M. (2012).
The social internet of things (siot)–when social net-
works meet the internet of things: Concept, archi-
tecture and network characterization. Computer Net-
works, 56(16):3594–3608.
Bahdanau, D., Cho, K., and Bengio, Y. (2014). Neural ma-
chine translation by jointly learning to align and trans-
late. arXiv preprint arXiv:1409.0473.
COMPLEXIS 2017 - 2nd International Conference on Complexity, Future Information Systems and Risk
100

Bartels, B. (2012). Strategies to the prediction, mitigation
and management of product obsolescence. Wiley.
Cooper, G. F. (1990). The computational complexity
of probabilistic inference using bayesian belief net-
works. Artificial intelligence, 42(2):393–405.
Ezziane, Z. (2006). Applications of artificial intelligence in
bioinformatics: A review. Expert Systems with Appli-
cations, 30(1):2–10.
Grady, L. J. and Polimeni, J. (2010). Discrete calculus:
Applied analysis on graphs for computational science.
Springer Science & Business Media.
Graves, A. (2013). Generating sequences with recurrent
neural networks. arXiv preprint arXiv:1308.0850.
Graves, A. and Jaitly, N. (2014). Towards end-to-end
speech recognition with recurrent neural networks. In
Proceedings of the 31st International Conference on
Machine Learning (ICML-14), pages 1764–1772.
Graves, A., Liwicki, M., Fern
´
andez, S., Bertolami, R.,
Bunke, H., and Schmidhuber, J. (2009). A novel
connectionist system for unconstrained handwriting
recognition. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, 31(5):855–868.
Graves, A., Mohamed, A.-r., and Hinton, G. (2013). Speech
recognition with deep recurrent neural networks. In
Acoustics, Speech and Signal Processing (ICASSP),
2013 IEEE International Conference on, pages 6645–
6649. IEEE.
Gregor, K., Danihelka, I., Graves, A., Rezende, D. J.,
and Wierstra, D. (2015). Draw: A recurrent neu-
ral network for image generation. arXiv preprint
arXiv:1502.04623.
Hinton, G. E. and Sejnowski, T. J. (1986). Learning and re-
leaming in boltzmann machines. Parallel distributed
processing: Explorations in the microstructure of cog-
nition, 1:282–317.
Hofmann, T. (2001). Unsupervised learning by probabilis-
tic latent semantic analysis. Machine learning, 42(1-
2):177–196.
Hopfield, J. J. (1982). Neural networks and physical sys-
tems with emergent collective computational abili-
ties. Proceedings of the national academy of sciences,
79(8):2554–2558.
Ji, L., Liu, Q., and Liao, X. (2014). On reaching group
consensus for linearly coupled multi-agent networks.
Information Sciences, 287:1–12.
Jordan, M. I. and Rumelhart, D. E. (1992). Forward models:
Supervised learning with a distal teacher. Cognitive
science, 16(3):307–354.
Kani, S. P. and Ardehali, M. (2011). Very short-term wind
speed prediction: a new artificial neural network–
markov chain model. Energy Conversion and Man-
agement, 52(1):738–745.
Kim, Y. and Srivastava, J. (2007). Impact of social influence
in e-commerce decision making. In Proceedings of
the ninth international conference on Electronic com-
merce, pages 293–302. ACM.
Kisch, H. R. and Motta, C. L. R. (2015). Model of a neu-
ron network in human brains for learning assistance
in e-learning environments. In Proceedings of the 7th
International Conference on Computer Supported Ed-
ucation, pages 407–415.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Le, Q. V., Jaitly, N., and Hinton, G. E. (2015). A simple
way to initialize recurrent networks of rectified linear
units. arXiv preprint arXiv:1504.00941.
Liao, X. and Ji, L. (2014). On pinning group consensus
for dynamical multi-agent networks with general con-
nected topology. Neurocomputing, 135:262–267.
Luong, M.-T., Sutskever, I., Le, Q. V., Vinyals, O., and
Zaremba, W. (2014). Addressing the rare word prob-
lem in neural machine translation. arXiv preprint
arXiv:1410.8206.
Manouselis, N., Drachsler, H., Vuorikari, R., Hummel, H.,
and Koper, R. (2011). Recommender systems in tech-
nology enhanced learning. In Recommender systems
handbook, pages 387–415. Springer.
Ochs, P., Ranftl, R., Brox, T., and Pock, T. (2016). Tech-
niques for gradient-based bilevel optimization with
non-smooth lower level problems. Journal of Math-
ematical Imaging and Vision, pages 1–20.
Poria, S., Cambria, E., Winterstein, G., and Huang, G.-B.
(2014). Sentic patterns: Dependency-based rules for
concept-level sentiment analysis. Knowledge-Based
Systems, 69:45–63.
Rosenblatt, F. (1958). The perceptron: a probabilistic model
for information storage and organization in the brain.
Psychological review, 65(6):386.
Scheffer, M., Bascompte, J., Bjordam, T. K., Carpenter,
S. R., Clarke, L., Folke, C., Marquet, P., Mazzeo, N.,
Meerhoff, M., Sala, O., et al. (2015). Dual thinking
for scientists. Ecology and Society, 20(2).
Sporns, O. and Koetter, R. (2004). Motifs in brain networks.
PLoS Biology, 2(2):e411.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent neural networks from overfitting. The Jour-
nal of Machine Learning Research, 15(1):1929–1958.
Suhrer, S. J., Wiederstein, M., Gruber, M., and Sippl,
M. J. (2009). Cops a novel workbench for explo-
rations in fold space. Nucleic acids research, 37(suppl
2):W539–W544.
Sutskever, I., Vinyals, O., and Le, Q. V. (2014). Se-
quence to sequence learning with neural networks. In
Advances in neural information processing systems,
pages 3104–3112.
Real World Examples of Agent based Decision Support Systems for Deep Learning based on Complex Feed Forward Neural Networks
101
