
Empirical Evaluation of Convolutional Neural Networks Prediction Time
in Classifying German Traffic Signs
Joshua Fulco
1
, Akanksha Devkar
2
, Aravind Krishnan
1
, Gregory Slavin
1
and Carlos Morato
1,3
1
Robotics Engineering Department, Worcester Polytechnic Institute, Worcester, MA 01609, U.S.A.
2
Electrical and Computer Engineering Department, Worcester Polytechnic Institute, Worcester, MA 01609, U.S.A.
3
Department of Mechatronics and Sensors, US Corporate Research Center, ABB Inc., CT 06002, U.S.A.
Keywords:
Convolutional Neural Networks, Classification Time, Traffic Sign Classification.
Abstract:
This paper discusses the use of Deep Learning and neural networks to identify images which contain road signs
to aid in the navigation of autonomous vehicles. Images of 32x32 pixels and 128x128 pixels of the GTSRB
dataset were used in training the existing neural network models as well as our novel models. Existing neural
network models mentioned in the literature study validate that very high accuracies in image classification
are already achieved. Different neural network model architectures were also reviewed to determine which
architecture produced the highest accuracy within the most efficient time. Modifications to these architectures
were made to produce valid results with a reduced image identification time. Our results of classifying a traffic
sign image of 32x32 pixels in 0.6ms is very reliable for real time output. By looking at the image identification
times for a 32x32 pixel image and a 128x128 pixel image we observed that size of the image is not the main
factor in the increase of the prediction time.
1 INTRODUCTION
Deep learning is a form of machine learning which
has recently re-emerged as a topic of great interest
and advanced research around the world after a near
decade fallout with researchers. The basic concept of
machine learning also known as representative learn-
ing can be best described in an example where a ma-
chine (or system of machine processors) takes in raw
data such as an audio clip or photograph and then
uses extractor tools to discover patterns within the raw
data. Features identified or discovered within the raw
data by the machine are passed between the multi-
ple layers or filters which are used to sort out features
such that they are saved to memory. In theory, with
a varying degree of accuracy, a system exercising the
methods of machine learning should be able to recog-
nize and/or identify identical or similar data to what
was presented in a previous training. In many ways
machine systems which are organized in a manner
similar to how it is believed the human brain is or-
ganized to intake information. It is believed that the
neurons in the human brain accept data or information
through the dendrites. The nucleus sorts or identi-
fies this information and then transmits other portions
of the information through impulses sent out to other
neurons through axons. With machine learning filters
or activation functions which identify features in raw
data are often organized in layers. These filters usu-
ally are trained to identify one particular feature, and
pass other information between activation functions
in the layer or transmit binary signals confirming or
eliminating the presence of a feature on to the next
layer or back to a previous layer. Methods with at
least three layers of activation function filters are re-
ferred to Deep learning models.
Deep learning methods are making great strides
recently in the field of autonomous automotive op-
erations. Recent news has been made with record
breaking deliveries for the Anheuser-Busch Corpora-
tion using autonomous vehicles (Menge, 2016). Deep
learning methods of machine learning have also been
used to aid in navigation of sedan vehicles on roads
with varying terrain. As shown in source (Bojarski
et al., 2017) a series continuously taken photographs
of a vehicles path are used to determined wheel orien-
tation. The photograph data is used to train a naviga-
tion model which can correlate to wheel position. In
addition visual navigation from images along a path
are hoped to mature as autonomous vehicle devel-
opment continues. Street sign recognition through
Deep Learning can also be used for vehicle veloc-
ity and navigation control, such that an autonomous
vehicle will stop at a stop sign, yield to a pedestrian
260
Fulco, J., Devkar, A., Krishnan, A., Slavin, G. and Morato, C.
Empirical Evaluation of Convolutional Neural Networks Prediction Time in Classifying German Traffic Signs.
DOI: 10.5220/0006307402600267
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 260-267
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

or other vehicles, as well as identify directional route
signs and road placards on a highway. It is the subject
of this paper to exploit the development of a Convo-
lutional Neural Network Deep Learning model that
could possibly be used to identify road signs for use
in the navigation of autonomous vehicles.
2 OBJECTIVE
It’s about time that we have autonomous cars taking
on the roads and the technology today has certainly
evolved to the extent of realising robotic cars unleash
the Earth’s road networks. Lux Research calculates
that the revenue opportunity from Advanced Driver
Assistance Systems (ADAS) features will grow from
$2.4 billion today to $102 billion in 2030. For such
an autonomous car to perform efficiently, it needs to
perceive the road visually. These cars need to have a
sharp vision that detect all types of road conditions -
traffic lights, road signs and take corrective measures
accordingly. Also, we have recently seen that Tesla’s
semi-autonomous cars are performing great with their
Autopilot mode and this assistance relieves drivers
stress.
Semi-autonomous cars are excelling in keeping
the driver alert by suggesting corrective actions and
making sure the driver doesn’t miss any on-road in-
formation. We focus on reducing the space and time
complexity of classification of German road signs us-
ing one of the Deep Learning techniques - Convo-
lutional Neural Networks(CNN) for the purpose of
driver assistance and making an autonomous car more
efficient.
Staggering results are achieved in the offline clas-
sification reaching 99.65% (Mao et al., 2016) accu-
racy, and when these results are compared with the
real-time classification results, they are low, partic-
ularly due to the computational complexity in time
and hardware requirements. It is varying anywhere
between 80% to 93% (Chen et al., 2012). After lo-
calization and detection, the detected image of a road
sign can have problems like
Scaling - leads to image quality reduction making
it hard to recognize/discern.
Rotation - a damaged/ rotated sign may be inter-
preted as a different sign altogether, for instance when
a left arrow somehow rotated 90 degrees clockwise
can simply mean that it is a straight arrow and not
make any sense. It is much harder to understand if
that rotated arrow was pointing right or left originally.
Projection distortion - a distorted sign board can
lead to wrong classification or no classification, for
instance the sign which indicates the merging of
left/right lane can be classified completely wrong due
to the distortion in the top portion of the sign.
There are few other problems while detecting the
road signs during the video recording phase such as
road signs may be subjected to dust deposition, or
may have faded with time, or be victim to graffiti,
stickers subjecting to occlusion and even getting dam-
aged in some cases. All these lead to increase in
the error rates of detection, prediction and classifi-
cation process. So we believe, Deep Learning with
CNN on a good hardware with reduced algorithmic
complexity can ease the process and improve accu-
racy for the real-time output. Another aspect to con-
sider is the selection of a dataset or datasets. Most
of the Deep Learning road sign identification exper-
iments we found are based on a German set of road
signs known as the German Traffic Sign Recogni-
tion Benchmark (GTSRB) (Igel, ) which has become
somewhat of a standard bearer.
As mentioned above, real time road sign detec-
tion is an important feature on ADAS, but in order
to be truly effective it needs to be both, accurate
and efficient. Specifically for road sign classification,
Deep Learning models based on Neural Networks are
known to be very accurate, achieving rates above hu-
man detection abilities (according to our preliminary
research) but not necessarily fast enough (yet) to be
used in real time systems where (embedded) process-
ing power is limited. On the other side, more con-
ventional computer vision techniques can be used to
achieve real time processing speed, but fell short in
accuracy when compared to Deep Learning methods.
Our objective is to empirically evaluate different Con-
volutional Neural Networks with multiple variations
of the hyper-parameters and make it classify the road
signs more efficiently for the real time output.
3 REVIEW OF LITERATURE
Dan Cires et al. avoided the cumbersome computa-
tion of handcrafted features and achieved a 98.73%
recognition rate with the best of their CNNs for the
German road sign recognition benchmark. They fur-
ther improved these results up to 99.15% recognition
rate using a committee of a CNN and a Multi Layer
Perceptron(MLP) where the CNNs are trained on raw
pixel intensities, although error rates of the best MLPs
are 3-4% above those of the best CNNs, a commit-
tee consistently outperforms the individual classifiers.
(Ciresan et al., 2011)
Jack Greenhalgh et al. proposed a novel real-time
system for the automatic detection and recognition
of traffic symbols. Candidate regions are detected as
Empirical Evaluation of Convolutional Neural Networks Prediction Time in Classifying German Traffic Signs
261

MSERs. This detection method is significantly insen-
sitive to variations in illumination and lighting con-
ditions. Traffic symbols are recognized using HOG
features and a cascade of linear SVM classifiers. A
method for the synthetic generation of training data
was proposed, which allows large datasets to be gen-
erated from template images, removing the need for
hand labeled datasets. Their system can identify signs
from the whole range of ideographic road signs cur-
rently in use in the U.K. which form the basis of our
training data. This system retains a high accuracy at
a variety of vehicle speeds and achieved recognition
accuracy of 89.2% for white road signs and 92.1% for
color signs (Greenhalgh, 2012)
Tam T. Le et al. presented a real-time process-
ing method of traffic-sign detection to apply in au-
tonomous driving system. Their proposed method uti-
lized linear SVM to classify color by a low complex-
ity (average 23 ms per frame). After that shape match-
ing was applied to eliminate positive errors. They
achieved 92.91 percent of detection accuracy and it
was applied on real-time autonomous driving system
with the processing speed of 20fps, where the maxi-
mum speed of car was limited at 30 km per hour.(Le
et al., 2010)
Yujun Zeng et al. proposed a novel architecture
for road sign recognition, where CNN acts as a fea-
ture extractor and Extreme Learning Machines(ELM)
trained on CNN-learnt features as the classifier, so
that the discriminative Deep Convolutional features
could match well with the generalization performance
of ELM classifier, leading to a satisfactory recogni-
tion accuracy without using more complex CNNs, en-
semble features, or data augmentation. In contrast
with state-of-art methods, the proposed method could
achieve competitive results (99.40%, without any data
augmentation and preprocessing like contrast normal-
ization) with a much simpler architecture that relieves
the time-consuming training procedure a lot. Yet, the
fact that most errors are mainly due to motion blur im-
plies that the performance may be further improved
if the CNN is equipped with some layers that could
learn blur-invariant features.(Zeng et al., 2015)
Pierre Sermanet et al. presented a Convolu-
tional Network architecture with state-of-art results
on the GTSRB road sign dataset implemented with
the EBLearn open-source library. During phase I
of the GTSRB competition, this architecture reached
98.97% accuracy using 32x32 colored data while
the top score was obtained by the IDSIA team with
98.98%. The first 13 top scores were obtained with
ConvNet architectures, 5 of which were above human
performance (98.81%).
Subsequently to this first phase, they established
a new record of 99.17% accuracy by increasing net-
works capacity and depth and ignoring color informa-
tion. This contradicted prior results with other meth-
ods suggesting that colorless recognition, while ef-
fective, was less accurate. They also demonstrated
the benefits of multi-scale features in multiple exper-
iments. Additionally, they report very competitive
results (97.33%) using random features.(Sermanet,
2011)
Junqi Jin et.al designed a TSR system using a
CNN, which is a special kind of deep neural net-
work. The model had the ability to learn both fea-
tures and classifiers. The learned features detect spe-
cific local patterns that are better than hand-coded fea-
tures. They have proposed an Hinge Loss Stochastic
Gradient Descent (HLSGD) method to train CNNs.
After they tested their algorithm on the GTSRB and
compared results with other competitors, their exper-
iments showed that HLSGD gave faster and more sta-
ble convergence and a state-of-art recognition rate of
99.65%(Jin et al., 2014)
4 DATASET
With any Deep Learning model a compiled set of raw
data is necessary to train, test, and validate a model.
The more samples within a dataset, the more features
a model can recognize during training. (Provided the
samples belong to a small number of classes.) The
more features recognized by the model, the better the
chance of high accuracy sample recognition during
validation and actual use. Due to access and time the
availability of compiled datasets is limited. It is not
uncommon for researchers to modify existing datasets
to achieve a large number of samples. In the case of
an image dataset it is not uncommon for images to be
cropped, contracted to a smaller size or specific area,
or reduced to gray scale if in color.
Traditionally half of a dataset is used for the pur-
poses of training. The remaining half is again split
into quarters. One quarter is used as part of a test set,
which may be mixed with the training set to determine
system accuracy following training. If the model does
not recognize the test set with the accuracy desired
additional exposure to the training set may occur un-
til the desired accuracy is achieved. The last quarter
of a dataset, is often referred to as the validation set.
This set of data is not used until training is complete.
The validation set is exposed to the model for identi-
fication to serve as a final proof of model accuracy.
For this project, to train a Deep Learning model
that can identify road signs, an image dataset was re-
quired. Two image datasets were found to be in exis-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
262

tences that are used by commercial groups in pursuit
of autonomous vehicle navigation. The first dataset
is from the Laboratory for Intelligent and Safe Auto-
mobiles (LISA) at the University of San Diego Cal-
ifornia, a group funded by a grant from several auto
manufacturers and US government agencies. Dataset
(Trivedi, ) is derived from several videos which were
recorded from car dashboard cameras. Some sample
datasets were parsed into individual still images. As
a result 47 types of US road signs are recorded in im-
ages with the natural scenic background. The images
range in size from 640x480 to 1024x522 pixels. 6610
images are in the set with 7855 annotations that iden-
tify the content of the images. Annotation content in-
cludes not only road sign descriptions but descriptions
of other items seen in the frame.
The second dataset is the German Traffic Sign
Recognition Benchmark (GTSRB) dataset, contain-
ing 40 classes of German traffic signs, and 50,000
images ranging in size from 15x15 to 250x250 pix-
els.(Stallkamp et al., 2012) The dataset was first used
as a benchmark for the 2011 IJCNN computer vision
competition, and is provided by the real time com-
puter vision research group. The dataset has both sin-
gle and multi-annotated images of road signs only.
The road signs are photographed in natural environ-
ments, but cropped so show only the signs. Natural
environments do include various lighting and weather
conditions.
We decided to train the model used for this ex-
periment with the LISA dataset but after realizing
that the dataset was very small relative to other im-
age datasets that were used for successful identifica-
tion with Deep Learning, a plan to combine the GT-
SRB with the LISA dataset was compiled. During
the early phases of the effort it was realized that the
two datasets only have one class of sample image in
common. Stop signs are the same in both the United
States as well as in Germany. Simply increasing the
number of classes with a small number of images in
a dataset (as would result from a simple combination
of both datasets) will not yield more accurate results
at training, as not enough features will be discovered
to improve identification accuracy.
It was also realized that the datasets contain image
samples that were different in focus and size. The GT-
SRB samples have only a ten percent border around
the sign, while the LISA samples and more gener-
ically pictures with road signs in the image frame.
As such to combine the datasets the stop signs in the
LISA dataset would need to be reduced and cropped
to have a matching size to the other dataset. It was de-
termined that the effort of combining the two datasets
was not an efficient use of time as the images gained
in the new dataset would be less than three percent of
the images already contained in the GTSRB dataset.
As such only the GTSRB dataset was used for im-
age identification in the project. All references to the
dataset will reference the GTSRB. While the break-
down of the dataset for training, test, and validation
as noted above is the accepted standard, processor ca-
pability limited the ability to work with whole sets.
Sample images from the dataset were loaded to work
with the model in batches containing 4000 to 6400
samples accordingly.
5 IMPLEMENTATION DETAILS
Three main Python scripts were used to produce the
bulk of the work. The first script was used to build a
workable version of the dataset to be used for train-
ing, based on the original GTSRB dataset. The path
and names of all the images with their corresponding
class were collected from the annotation file provided.
The localization and dimensions of the traffic signs in
each image were again obtained from the annotation
files. For convenience, 43 separate folders were cre-
ated and the respective traffic sign (also called classes)
images were resized to predetermined size of 32x32
and 128x128 pixels and stored respectively.
The second script was used to train the GTSRB
dataset using a combination of Convolutional Neural
Network models and image sizes. An augmented ver-
sion of this GTSRB dataset was developed by rota-
tion of the images in various angels. In preparation
for the training, a list of all the image filenames were
created and shuffled for randomness. This increased
the robustness of the network. The process of training
was performed in batches where the image files were
loaded into memory, divided as training, validation
and testing sets with a factor of , and respectively.
At the very end, the model with its weights were saved
to a .h5 file. For plotting purposes, the history and the
scores’ results were saved to .npy files.
The third script performs the actual class predic-
tion time measurements. Just like the training script
(second script), the process starts by creating the ran-
dom list of image files and loading the test set to be
used for prediction. The file saved by the training
script is used to load the desired model and then each
sample, or a collection of samples from the test set are
then submitted for prediction having their execution
time collected using the timeit Python library. Time
results are saved in a .npy file to be processed later.
This process is then repeated for each trained model
selected and we had six different models.
Empirical Evaluation of Convolutional Neural Networks Prediction Time in Classifying German Traffic Signs
263
6 MODEL TRAINING
(INTERMEDIATE RESULTS)
As part of our study of prediction times for real-time
applications, for instance in detection and classifica-
tion of traffic signs for an autonomous vehicle, we
used a variety of convolutional neural network models
with distinct characteristics. We were specifically in-
terested in gathering information about the prediction
time itself.
Six models were used, with the total number of
layers ranging from 3 to 31, more specifically from
1 to 10 convolutional layers. The training used two
versions of the dataset with images previously resized
to 32x32 pixels and 128x128 pixels. The dataset was
divided into 50% for the training, 25% for the vali-
dation and 25% for the testing. All the six models
were trained on a Intel i7 processor with NVIDIA
GPU 1060 series. the physical RAM was about 16
gigabytes. All the models converged for the normal
dataset(without augmentation). Typically the deeper
models took more than 24 hours to complete the train-
ing. The shallowest model 1 took about 6 hours to
finish training. The final, trained, models had a num-
ber of parameters varying from a little more than 300
thousand up to almost 70 million. A brief summary of
the models used is listed in Table 1, where the number
of convolutional layers is the most important aspect.
Table 1: Convolutional Network Models.
Model Layers Parameters
Total Convolutional 32 Pixels 128 Pixels
1 3 1 1,239,339 28,846,315
2 10 2 319,979 7,397,867
3 31 10 28,463,723 59,921,003
4 16 4 1,482,091 17,210,731
5 16 4 5,835,435 68,749,995
6 17 3 3,788,907 54,120,555
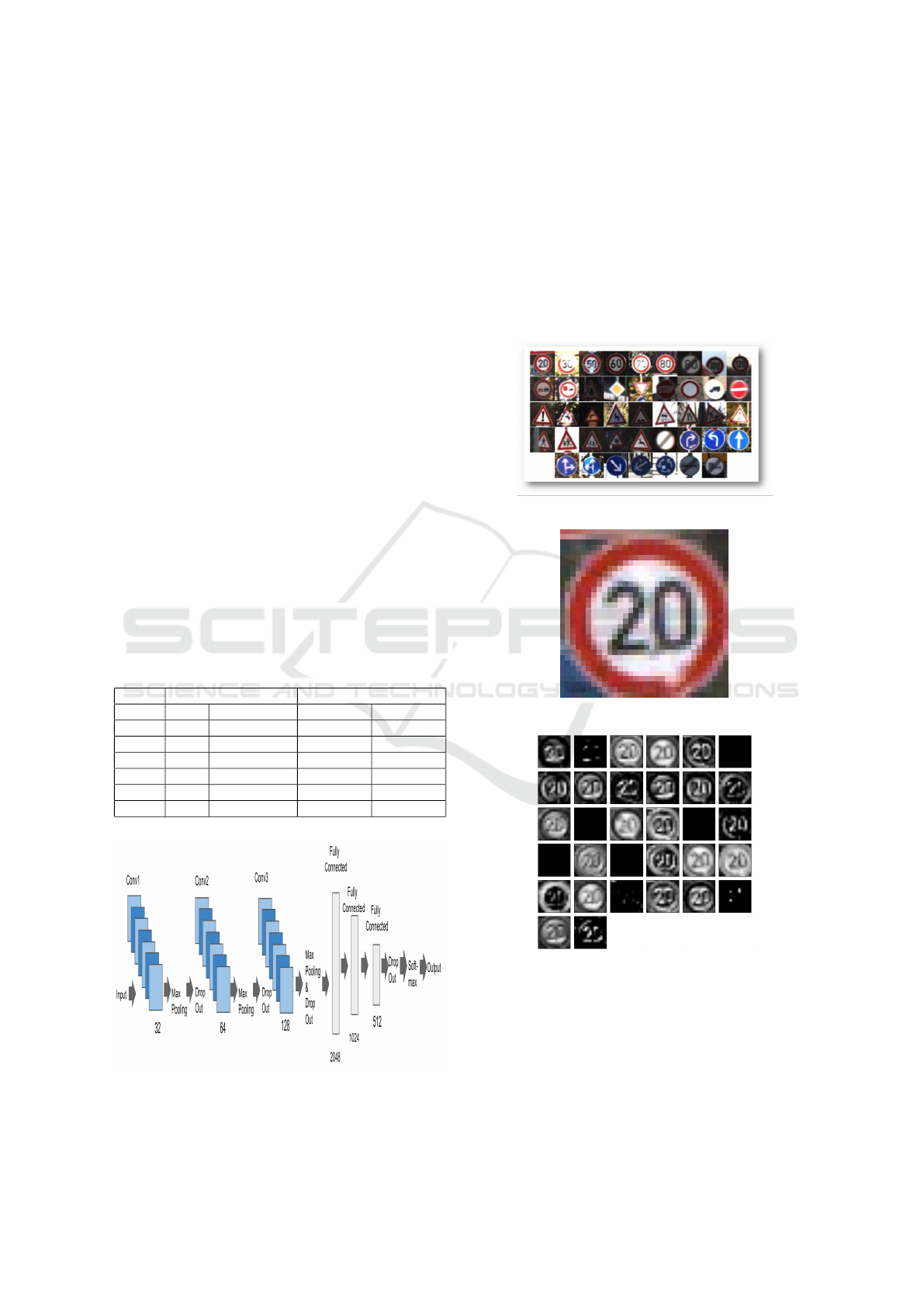
Figure 1: Model 6 Architecture.
Fig. 1 shows the architecture of our best model-
the model 6 and Fig. 2 shows the instances from GT-
SRB dataset. We considered one of the traffic signs,
’Speed Limit of 20kmph’ as shown in Fig. 3 and ob-
tained visualizations per layer for model 6. Fig. 4
shows the first layer i.e. the Convolutional Layer with
32 filters. Convolutional layer computes the output
of neurons that are connected to local regions in the
input, each computing a dot product between their
weights and a small region they are connected to in
the input volume.
Figure 2: Instances from GTSRB dataset.
Figure 3: Traffic Sign - Speed Limit of 20kmph.
Figure 4: First Layer: Convolutional Layer with 32 filters.
Fig. 5 shows the second layer i.e. Max Pooling
layer that performs a downsampling operation along
the spatial dimensions (width, height), and fig. 6
shows the eighth layer that applies Max Pooling after
the third and final convolutional layer with 128 filters
Fig. 7 shows validation accuracy results for a combi-
nation of models and image sizes, where a rate of 99%
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
264
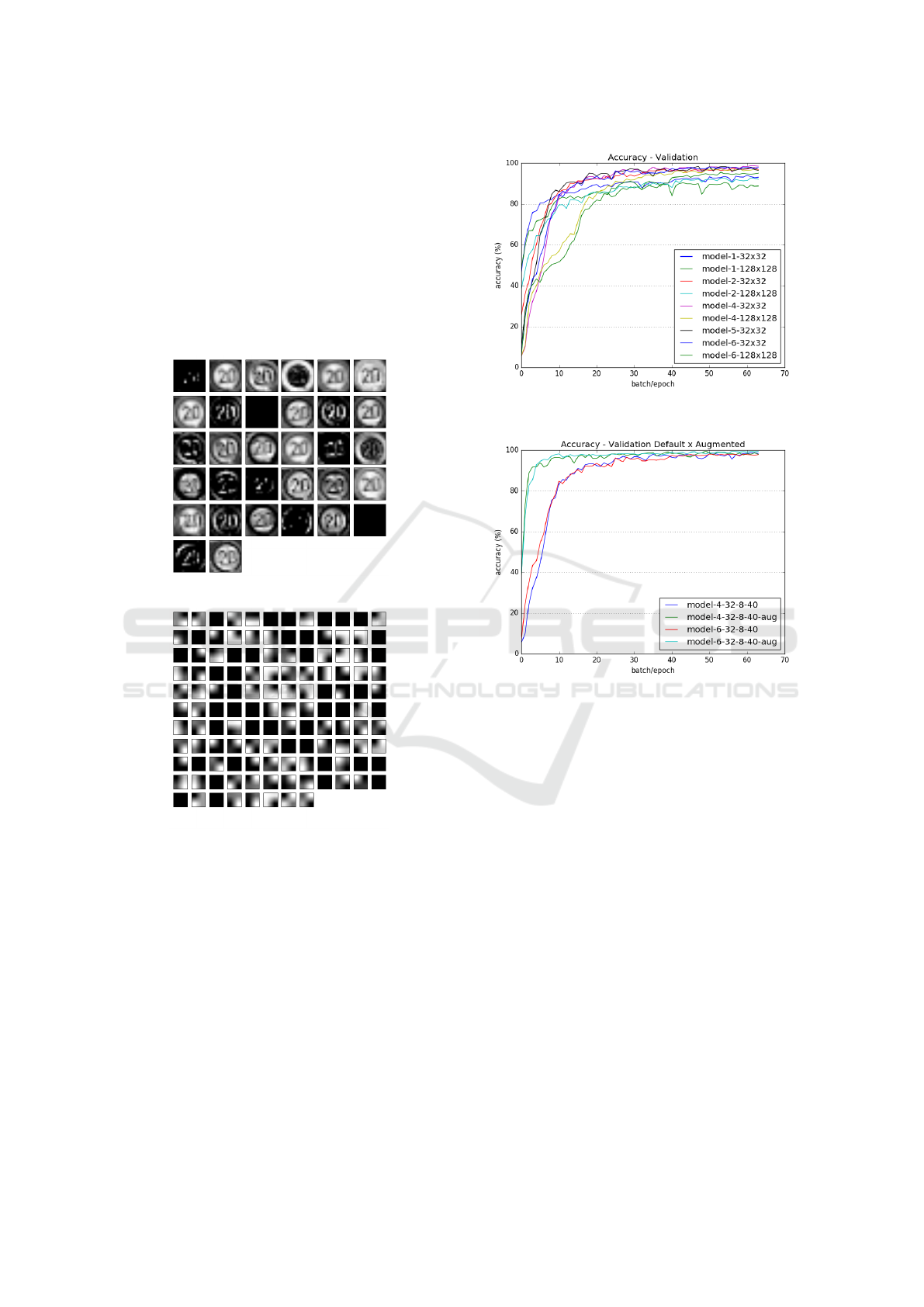
was achieved in a few cases. Training with a higher
number of epochs also showed a slight improvement
in overall accuracy. Additionally, an augmented ver-
sion of the dataset, by means of small rotation on the
original images, was also used for training, hoping for
better accuracy. In the experiment, image rotations
of -4o,-2o,+2o and +4o were added to the dataset at
training time. Two of the best models in respect to ac-
curacy, were then selected for training this augmented
version of the dataset. Improved accuracy results are
shown in Fig. 8.
Figure 5: Second Layer: Max Pooling.
Figure 6: Eighth Layer: Max Pooling.
7 RESULTS - PREDICTION AND
MEASUREMENT
After having trained multiple models, in different sce-
narios, we started performing class prediction time
measurements. Using the trained models and a subset
of the test set, the prediction time was measured, at
first, sample by sample.
The results from all 6 models are shown in Fig.
9. The left side of the image shows the prediction
times for samples with 32x32 pixels and samples with
128x128 pixels on the right. Prediction times varied
from as low as 0.6ms for the first model up to about
Figure 7: Accuracy for Validation Set.
Figure 8: Augmented x Non-Augmented Accuracy.
11.5ms for the 3rd model in the case of images with
32x32 pixels. If we consider a scenario where each
video frame has an average of 3 traffic signs, they
are equivalent to processing 500fps down to 30fps. In
the case of 128x128 pixel images, when compared to
the 32x32 pixel images, prediction times increased to
2.3ms for the first model and up to 21.0ms for the 3rd
model, or in video processing terms, 140fps down to
15fps. The increase in time was about 1.3 times for
the best case, up to 7.5 times for the worst case. The
model 3 happens to be the shallowest of the 6 mod-
els. One important observation made here is, in most
cases the prediction time increase was less than 2.5
times when compared to the increase in image size of
16 times in the number of pixels. It shows that the
image size is not the main factor behind the increase
in prediction times.
Up to this point, all time measurements (and train-
ing) were performed on a system based on a NVIDIA
GTX 1060 GPU card with 6GB of memory. To
better understand the variations in hardware perfor-
mance, additional experiments were performed with
other GPU and CPU based systems. Fig. 10 shows
Empirical Evaluation of Convolutional Neural Networks Prediction Time in Classifying German Traffic Signs
265
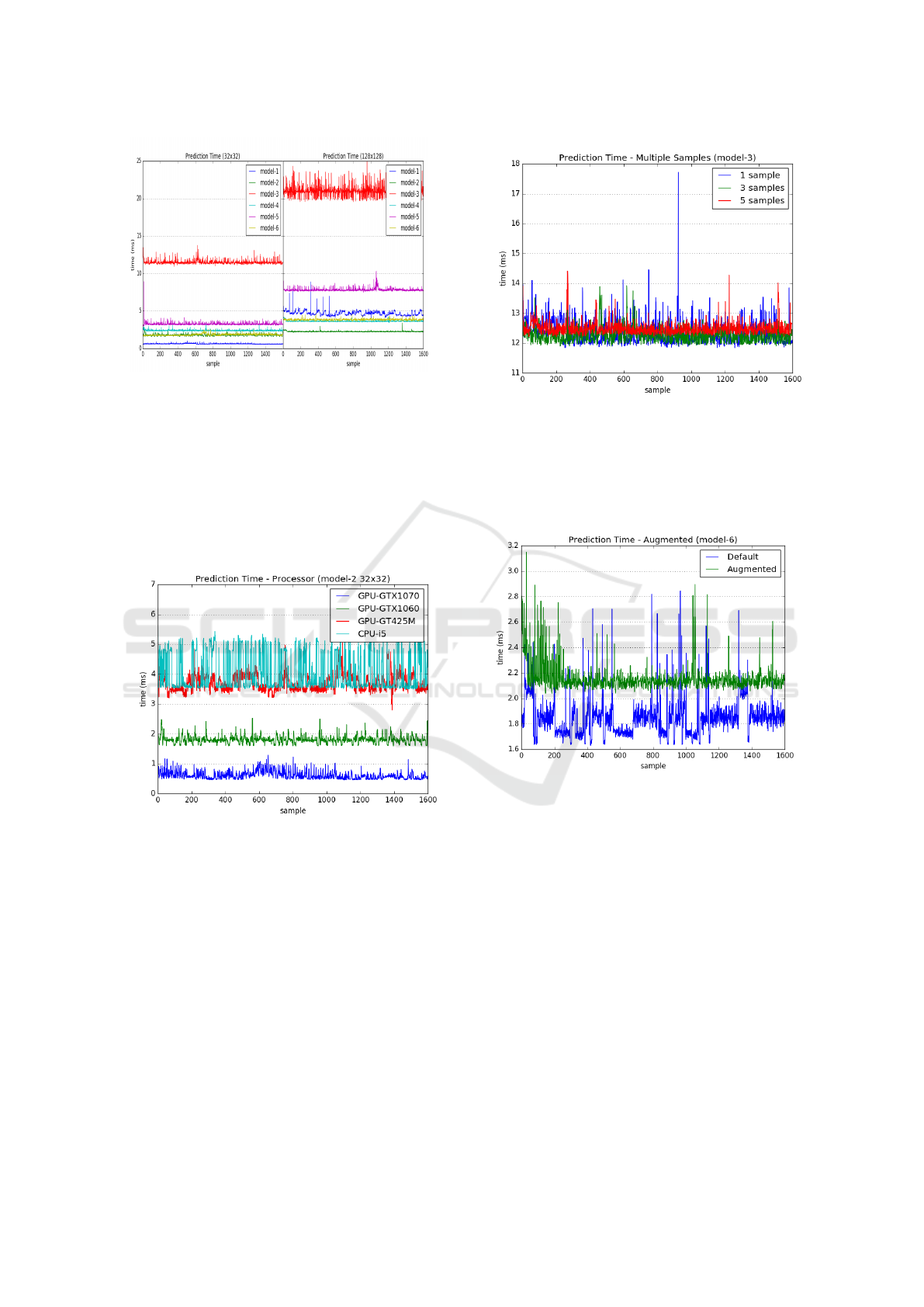
Figure 9: Prediction Times - 32x32 pixels against 128x128
pixels.
the results for prediction times measured on 4 differ-
ent systems. Both a faster and a slower GPU were
used as well a CPU based system for comparison. In
this present work we were not able to perform mea-
surements with an embedded solution, more applica-
ble in a real-time system, which will have to be left
for future work.
Figure 10: Prediction Times per Processor.
Considering that in a real-time application for
traffic sign classification, one particular frame from
the video stream can contain multiple detected signs,
which can be fed to the classification algorithm all
at once for possible improved performance. Another
experiment was performed where multiple samples
were trained for comparison and the graph in Fig. 11
shows that the overall performance was not affected
by the number of samples to be predicted at the same
time. We tested with 1, 3 and 5 samples. The time in
the graph represents the average time per sample and
the behavior was confirmed by similar data collected
from other trained models.
A final experiment was performed using the
trained models with the augmented dataset in order
Figure 11: Prediction Times for Multiple Samples.
to determine if the larger dataset (that gave us better
accuracy) would affect the overall classification time.
Fig. 12 shows an increase of about 16% in prediction
time for a dataset 5 times larger than the original.
Figure 12: Prediction Times for Augmented Dataset.
8 CONCLUSION
Even though the primary goal for this project was
not to achieve the best possible accuracy, we were
able to obtain satisfactory results bordering the 99%
mark, with slightly better numbers for the augmented
dataset. About the prediction time results, when we
combine all the performed experiments together, the
best observation we can make is, the average time for
classification is somewhat proportional to the number
of convolutional layers in the respective model. On
the contrary, results are not necessarily proportional
to the actual total number of layers in the model or
even the number of parameters in the model. Over-
all, the choice of a particular convolutional model
plays a bigger role than the change in image size or
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
266

an augmentation of the dataset. Also, when com-
paring prediction times for a single sample versus
multiple samples, we saw no differences at all, giv-
ing the possibility of parallel classification of multi-
ple signs per video frame, instead of just one sign.
In all cases, the data collected is hardware dependent,
as demonstrated, but with the current state-of-the-art
GPUs, real-time capability is indeed achievable, even
though, from our experiments, some of the deepest
models did not show fast enough results, especially
when we consider the fact that we are simply talk-
ing about classification time and not account for the
actual traffic sign localization within the video frame
captured. Several different processors ran six differ-
ent CNN Deep Learning models. The models were
trained and verified to identify German traffic sign
images with varying orientations and augmentations
from the GTSRB benchmark dataset with a high ac-
curacy. With some variations to the dataset, identifi-
cation of images occurred in less than one millisec-
ond on one of the processors. In others cases, with
deeper networks, more specifically with multiple con-
volutional layers, the results were not as good in com-
parison with shallower networks along with a depen-
dency on the processor used. Our model 6 has just
three convolutional layers and it gave the best accu-
racy. After a certain depth, the features that the net-
work looks for may not make sense for the classifi-
cation purposes and we believe this could possibly be
one of the reasons for the multiple convolutional lay-
ers not performing better. We aim to further improve
prevention of gradient vanishing and use deep resid-
ual learning with deeper networks to observe their be-
havior. As future work, we can modify the dataset
by converting the images to gray-scale, known to be
helpful to improve accuracy as it was the case with the
winner in the GTSRB competition. Another aspect to
consider is the distribution of the images within the
classes which are not homogeneous. Most common
traffic signs have up to 3 thousand images, while the
least common ones have only a few hundred. In this
case, a reduced version of the dataset, by removing
classes where the number of images is less than 1000,
could give us a more homogeneous dataset, and hope-
fully an increase in overall accuracy, by not relying
on classes with too few trained samples. And yet an-
other aspect to be considered is to fine-tune the mod-
els used in the experiment, in terms of activation and
loss functions and its parameters. In terms of hard-
ware, this experiment was limited to desktop or note-
book PCs, and so, it did not consider some of the em-
bedded platforms that are intended to real-time appli-
cations like traffic sign classification. We intend to
implement these networks on NVDIA Tegra X1 de-
velopment board and achieve great increment in the
classification speed for real-time applications.
REFERENCES
Bojarski, M., Del Testa, D., Dworakowski, D., Firner, B.,
Flepp, B., Goyal, P., Jackel, L. D., Monfort, M.,
Muller, U., and Zhang, J. e. a. (2017). End to end
learning for self-driving cars. Arxiv.org.
Chen, L., Li, Q., Li, M., Zhang, L., and Mao, Q. (2012). De-
sign of a multi-sensor cooperation travel environment
perception system for autonomous vehicle. Sensors,
12(12):12386–12404.
Ciresan, D., Meier, U., Masci, J., and Schmidhuber, J.
(2011). A committee of neural networks for traffic
sign classification. The 2011 International Joint Con-
ference on Neural Networks.
Greenhalgh, JackMirmehdi, M. (2012). Real-time de-
tection and recognition of road traffic signs. IEEE
Transactions on Intelligent Transportation Systems,
13(4):1498–1506.
Igel, C. German traffic sign recognition
benchmark gtsrb dataset available at:
http://benchmark.ini.rub.de/?section=home.
Jin, J., Fu, K., and Zhang, C. (2014). Traffic sign recogni-
tion with hinge loss trained convolutional neural net-
works. IEEE Transactions on Intelligent Transporta-
tion Systems, 15(5):1991–2000.
Le, T. T., Tran, S. T., Mita, S., and Nguyen, T. D. (2010).
Real time traffic sign detection using color and shape-
based features. Intelligent Information and Database
Systems, pages 268–278.
Mao, X., Hijazi, S., Casas, R., Kaul, P., Kumar, R., and
Rowen, C. (2016). Hierarchical cnn for traffic sign
recognition. 2016 IEEE Intelligent Vehicles Sympo-
sium (IV).
Menge, Anheuser-Busch, O. (2016). Complete first self-
driving truck delivery of beer. Neural Networks.
Sermanet, PierreLeCun, Y. (2011). Traffic sign recognition
with multi-scale convolutional networks. The 2011
International Joint Conference on Neural Networks.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2012). Man vs. computer: Benchmarking machine
learning algorithms for traffic sign recognition. Neu-
ral Networks, 32:323–332.
Trivedi, M. M. Lisa dataset. available at:
http://cvrr.ucsd.edu. Cvrr.ucsd.edu.
Zeng, Y., Xu, X., Fang, Y., and Zhao, K. (2015). Traffic
sign recognition using deep convolutional networks
and extreme learning machine. Lecture Notes in Com-
puter Science, pages 272–280.
Empirical Evaluation of Convolutional Neural Networks Prediction Time in Classifying German Traffic Signs
267
