
Precise Estimation of Reading Activities with Face Image and Read
Aloud Voice
Kyota Aoki, Shuichi Tashiro and Shu Aoki
Graduate School of Engineering, Utsunomiya University, 7-1-2 Yoto, Utsunomiya, Japan
Keywords: Reading Activity, Automatic Measurement, Objective Measurement, Multiple Features.
Abstract: In Japanese public primary schools, every pupil may use an ICT device individually and simultaneously. In
normal primary school, a few teachers must teach all pupils in a class. It is difficult to help all pupils to use
an ICT device. For using ICT devices individually in a normal class, the ICT device help its’ user by itself.
To help the user, the ICT device must understand the state of the user. To help a teacher, it must precisely
understand the users' reading activities. Reading ability is the base of all subjects. It is important that pupils
acqure reading ability. This paper proposes a method to recognize the precise reading activity of a user with
read aloud voices and facial images, shows its implementation, and experimental results. With the cooperative
analysis of a read aloud voice from a microphone and a movement of a mouth from a camera, our
implementation enables to estimate the action of read aloud much more precisely. The timing of a read aloud
action is estimated in phrase by phrase manner. In-vitro experiments confirm the performance of our
implementation.
1 INTRODUCTION
In Japan, if a pupil shows two years’ delay of reading
ability, we say that the pupil has a reading difficulty.
Some Japanese normal public primary schools have
about 20% of pupils with a light reading difficulty. Of
course, there are pupils with a heavy reading
difficulty. The pupils with a heavy reading difficulty
attend special support education classes or schools. In
primary school years, girls show about two years
progress than boys in their development. This
difference makes it difficult to teach boys and girls in
a same class.
In Japan, Information and Communication
Technology (ICT) devices is spreading. In a near
future, there is an ICT device for every pupil in a
normal class. A personal ICT device may help to
overcome the personal difference. However, the
number of ICT devices in a class makes new
problems. Some pupils need a help to use ICT
devices. Some ICT devices may fail. In the case
where is one ICT device in a class, a teacher can treat
the problems. However, the number of ICT devices
make it difficult that a teacher processes all the
problems.
To introduce a personal ICT device in a normal
class, we must decrease the problems about an ICT
device drastically. However, there must be problems
to use ICT devices. For this reason, we will cover the
easy problems about the usage of ICT devices with
the ICT device itself. In Japan, a normal class
includes about 32 pupils. About 20% of pupils have
some problems about using ICT devices. We will
cover the 80% of the problems with ICT device itself.
In the case, the teachers can treat only two pupils that
have the problems not covered by the ICT device
itself.
To help a pupil, an ICT device must understand
the activity of a pupil precisely. A human teacher can
observe and understand not only the activity but also
the inner state of a pupil. However, it need a huge
computation power and a huge measuring system. In
this paper, we will propose and implement the method
to understand the activity precisely with the feasible
ICT devices in a near future. The understanding of an
activity is a start point of understanding of the inner
state of a pupil.
In a near future, the personal ICT device will have
a power of a powerful personal computer now.
Therefore, our goal must be achieved with a personal
computer. Now, a personal computer has a camera, a
microphone, a keyboard and a touch panel to input.
Aoki, K., Tashiro, S. and Aoki, S.
Precise Estimation of Reading Activities with Face Image and Read Aloud Voice.
DOI: 10.5220/0006315603150322
In Proceedings of the 9th International Conference on Computer Supported Education (CSEDU 2017) - Volume 1, pages 315-322
ISBN: 978-989-758-239-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
315

We have developed Japanese text presentation
system to help the pupils to read Japanese texts (Aoki,
Murayama and Harada, 2014; Aoki and Murayama,
2012). To the system, we will add the ability to
understand the precise reading activity of a user.
Already, the system has an ability to recognize the
rough reading activity (Aoki, Murayama, Aoki and
Tashiro, 2015). And, we show our project to enable
to estimate much more precise reading activity (Aoki,
Tashiro and Aoki, 2016). This paper shows the
implementation of the project and experiments to
estimate the ability to understand the precise reading
activity of a user.
Frist, we discuss the precise reading activity. Then,
we discuss the relation between the measurable
actions and reading activity. Next, we show the
method to understand reading activities with images
and sounds. Then, this paper proposes the
implementation of the proposed method and
experimental results. And last, we conclude this work.
2 READING ACTIVITIES
2.1 Japanese texts
First, we must discuss the structure of Japanese texts.
Japanese texts include mainly three types of
characters. Two types of characters are Hiragana and
Katakana. They are phonogram as alphabet. The
other is Kanji. Kanji is ideogram. There is no word
spacing in Japanese texts. We can easily recognize
word chunks with the help of boundary between a
Kanji character and Hiragana character. A sequence
of Katakana character makes one word that represents
the phonetic representation of a foreign word.
Japanese sentence ends by a punctuation mark.
We can easily find a sentence in a sequence of
characters. In a sentence, we can find a word chunk
starting from a Kanji character and ending at the last
Hiragana character in a sequence of Hiragana
characters. There may be a word chunk only
including Hiragana character. In the case, we have
some difficulty to find a ward chunk.
2.2 Change of Japanese Text in
Primary School Ages
In Japanese primary schools, pupils start to learn
Japanese characters. In Japan, many infants learn
Hiragana before primary school ages. However, an
primary school is the first step of compulsory
education in Japan.
In six years of an primary school, pupils learn
Hiragana, Katakana, and Kanji characters. In Japan,
if a pupil shows two years’ delay of reading ability,
we say that the pupil has a reading difficulty. Some
Japanese normal public primary schools have about
20% of pupils with a light reading difficulty. Of
course, there are pupils with a heavy reading
difficulty. The pupils with a heavy reading difficulty
attend special support education classes or schools.
Teachers want to help pupils with reading
difficulties. However, it is difficult to find pupils with
light reading difficulties in first and second year in a
primary school. If we can understand the precise
reading activities, we can find a tiny sign of reading
difficulties in very first stage. Teachers can help the
pupils in very first stage of reading difficulties. The
fast guidance may prevent the increase of reading
difficulties. In many cases, a fast guidance is more
effective than a late guidance.
In the first year of an primary school, there are
only 80 Kanji characters learned. Therefore, the text
for a pupil at the start of second year only includes
about 80 Kanji at most. Texts have word spacing. In
a second year, texts have no word spacing as normal
Japanese texts. At this stage, some pupils show
reading difficulty about recognizing word chunks in
a sentence. However, they can read the sentence as
written by Hiragana and small number of Kanji. Their
reading aloud voice has features that can be detected
by experienced teachers.
In elder pupils, there is a problem about Kanji.
Some pupils do not remember enough number of
Kanji. Some pupils do not remember the phenomes
representing the Kanji. In the case, a teacher easily
finds the problem. However, there needs long time for
checking all pupils in a class.
Our Japanese text presentation system enables to
check all pupils in a class simultaneously. This
enables to repeat the test in a short interval.
2.3 Word Chunk
In Japanese texts, most of word chunks form the
sequence of characters starting from Kanji, and
ending to Hiragana. Of cause, in a very first year in
primary school life, almost all word chunk is formed
only by Hiragana. In the texts, a word chunk is
separated from other chunks with a space.
Our Japanese text presentation system presents a
text with three levels of masking and high-lighting
(Aoki, Murayama and Harada, 2014; Aoki and
Murayama, 2012). With the high-lighting, a user can
easily find a word chunk.
The standard length of a high-lighted part expands
with the development of reading ability. In the long
CSEDU 2017 - 9th International Conference on Computer Supported Education
316
high-lighted part, a pupil finds basic word chunks and
recognize the relations among word chunks. In elder
pupils, there is a problem about this function.
In the text for elder pupils, there are many Kanji
characters. Therefore, it is easy to find a basic word
chunks in a sentence. However, in a long high-lighted
part, there are complex relations among word chunks.
Some elder pupils with reading difficulties have
problems about recognizing the relations among word
chunks. Experienced teachers can find this problem
easily. This problem appears in a long sentence that
enables to include complex relations of word chunks.
Using a long text for checking this kind of reading
difficulties, the length for checking must increase. As
a result, it is difficult to check all pupils in a class. In
this case, our Japanese text presentation system can
help a teacher with the precise understanding of
pupils’ reading activities.
3 MEASURABLE ACTIVITIES
3.1 Reading Environments and
Activities
In normal class room, there are 40 pupils at most in
Japan. A class room is well lighted and has windows
at south side. There is no heavy noise.
There are two types of reading activities. One is
reading aloud, and the other is a silent reading. In
silent readings, there is no aural activities. We cannot
estimate the precise place of readings. In reading
aloud, we can estimate the place of readings.
Our long goal is the understanding reading
activities reading aloud and silent reading. However,
our next step is understanding the precise reading
activities in reading aloud.
The reading activity in reading aloud has many
sub-activities. They are looking at a text, looking at a
sentence, following a sequence of words, recognizing
word chunks, recognizing the relations among word
chunks, understanding a sentence, constructing a
sequence of vocal sounds, and uttering aloud the
sequence of vocal sounds. There are observable
actions and un-observable actions. Observable
actions are eyes’ movement, mouth’s movement,
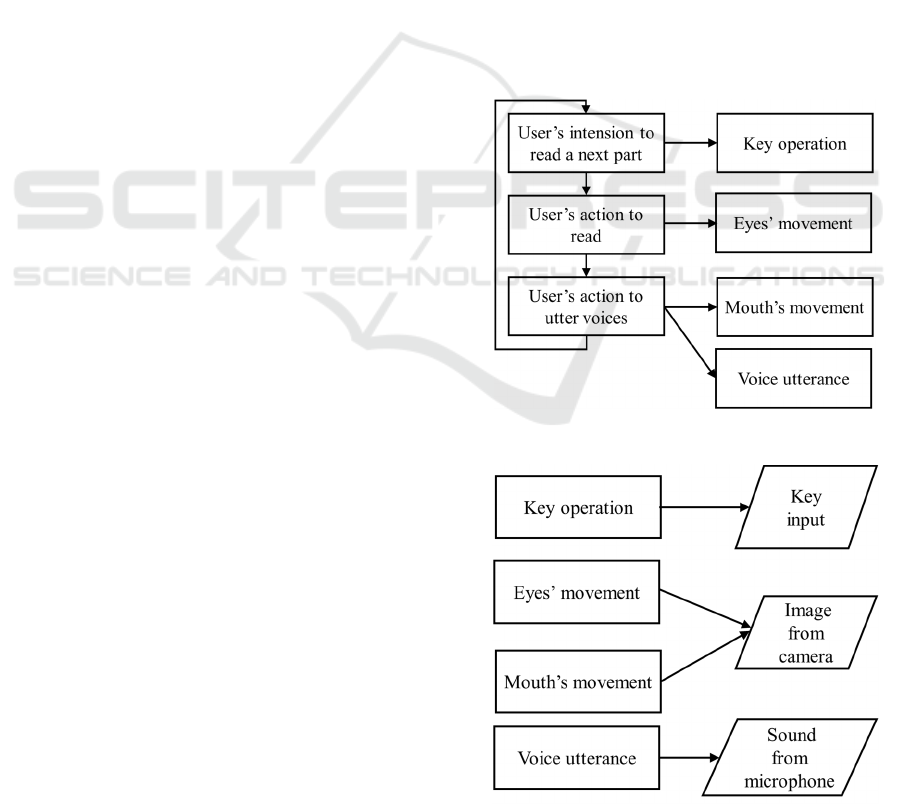
utter voice and key operation. Figure 1 shows the
relation between observable actions and measured
features.
3.2 Effective Sensors
Now, a PC has a camera, microphones, a touch-panel,
and a key-board for input. A camera takes full-HD
images. A camera takes a user’s facial images. In full-
HD images, we can recognize eyes and irises. Of
cause, we can recognize a mouth.
A microphone of a PC is not best for distinguish
a voice of a user among others’ voices and noises. In
a near future, a PC can have an array of microphones.
However, now, a PC’s microphone does not construct
an array. However, with the help of a user’s mouth
movements, we can distinguish the voice of a user
among others’ voices and noises.
In our Japanese text presentation system, a touch-
panel has no role. Key-inputs are clear presentations
of user’s intension about reading texts. Figure 2
shows the relation between measured features and
sensors.
3.3 Relation between Sensors and
Activities
Figure 2 shows the relation between a reading activity
and a sensor that can catch the activity. A camera
catches the facial image of a user. In facial images,
there are eyes and a mouth. In reading activities, sight
Figure 1:Relation between actions and measured features.
Figure 2: Relations between features and sensors.
Precise Estimation of Reading Activities with Face Image and Read Aloud Voice
317

takes important role. Eyes are only sensors supporting
sight. The motion of eyes represents the reading
activity directly.
The movement of a mouth is also caught by a
camera. The movement of a mouth represents the
reading aloud itself. It also represents the preparation
for uttering voices.
A microphone catches the reading aloud voice. In
reading aloud, voice is the direct expression of
reading aloud.
A key operation is the only expression of the
intension to proceed the next word chunk, not an
expression of reading activity.
4 PROCESSINGS ABOUT IMAGE
AND SOUND
4.1 System Overview
The authors built our previous Japanese text
presentation system with Python, Pyglet, Julius,
Mecab, and OpenCV. The previous system already
utilizes the benefits of multi-processing (Julius 2016;
Mecab, 2016; OpenCV, 2016; Python 2016; Pyglet,
2016). Mecab is a Japanese part-of-speech and
morphological analyser. Now, a PC’s processor can
handle two or more process simultaneously. Our
system utilizes this benefit. Constructing a system
based on multi-processing, it is easy to make many of
real-time measurements without depending each
other.
Python is a programming language powerful
enough to include all those features. Pyglet is a real-
time library only depending Python itself. This
feature keeps portability. In Japan, public schools’
ICT devices are decided by the education board of
each city or town. A drastical change of ICT devices
may occur. In the case, portability of our system helps
to survive.
4.2 Key Operations
Our Japanese text presentation system does not turn
page. The Japanese text presentation system puts the
high-lighted part forward with user’s key-operations.
In reading activities, the key-input to put the high-
lighted part forward is the only key-operation. Our
Japanese text presentation system understand user’s
intension to proceed the reading part.
4.3 Image Processing
4.3.1 Mouth Movements
The camera of a PC catches facial images. With a
facial image, we can have a motion of a mouth. In
reading aloud, the user’s mouth must move. The
motion of a mouth is easily measured while the user’s
face shows no move. However, in some cases, a
user’s face moves. We find the base-point in a face
image. In our processing method, a nose is a base-
point. With the base-point, we measure the motion of
a mouth. To take a motion, we need at least two
frames. Therefore, at first, one frame is get and
processed to find the region of interest.
In many cases, the movement of a mouth relates
the action of reading aloud directly. However, in
precise measurement, there are mouth movements
just before an utterance. We need to make a proper
form of mouth to make a proper sound. Some pupils
move mouth without reading aloud action. In the case,
there is no direct relation between the movement of a
mouth and reading aloud activity.
If we know the type of a reader, we can treat this
problem. However, with video images only, it is
difficult to decide the type of a reader. With the help
of a sound processing, we treat this problem. A video
of a PC is properly fixed to the user. So, there is little
possibility to mixed with other face images. However,
sound is not restricted to the user. In a normal class
room, the distance between pupils is short. The sound
of other pupils must mix into the sound detected by a
microphone of a PC.
4.3.2 Method and Implementation
A face is not fixed in a video frame. We need to
compensate the movement of a face. We need to
measure the movements of a mouth in a face. So, we
need to the movement of a mouth based on the place
which is not move in a face. There may be fixed eyes
and a nose in a face. There are a face detector, a nose
detector, a mouth detector, and an eye detector in
Opencv. However, these detectors are not powerful
enough to detect their objects without error detections.
The large regions as a face is detected with less error
detections than the small regions as an eye. So, we
restrict the region searched to detect an object.
However, to restrict the region searched, we need to
know the region. So, we first detect the largest region.
The largest region is a face. A face includes eyes, a
nose and a mouth. Figure 3 shows the relations among
sub-process of image processings.
CSEDU 2017 - 9th International Conference on Computer Supported Education
318

In experiments, the upper three fifth of the face
region detected is a candidate region to detect a region
of eyes. If the detection of eyes has a single detection
result, our system decides the regions of a nose and a
mouth using the face region detected and the eyes
region.
The detected regions of a face and eyes are not
strictly defined. As a result, small amount of
movements is not correct enough to estimate the
motion of a mouth. We estimate the precise
movements of a face and a mouth using a block
matching method.
With the region detected as a nose, we decide the
region of interest for block-matching. The block size
and the block placement depends on the image size.
Block-matching needs much computations. In the
detected nose region, we make block matching to
estimate the precise face movement. The block size is
eight by eight pixels square in our experiments. The
blocks are arranged as a tile arrangement. There is no
overlap and no gap.
In a nose region, there is a little deformation. So,
a small number of blocks can work well. However, in
a mouth region, there are relatively large
deformations. However, we select eight by eight
square as a block size, and do a similar arrangement
of blocks as a nose region.
We define the mouth region with the face region
and eyes regions detected. With the coordinate of the
detected regions, a mouth region is defined as (1) and
(2). (1) is the upper left corner of the region. (2) is a
width of the region. (3) is a height of the region.
cx int
mr 0.4
,c
y
int
d∗1.1
(1)
In these equations, mr is the half of the width of a
face region detected. d is the distance between the
center of a left eye and one of the right eye detected.
A nose region is defined as (4), (5) and (6).
intmr 0.55
(3)
(4) defines the upper left corner of the region. (5)
defines the width of the region. (6) defines the height
of the region.
In (6), (cx, cy) is the center of two eyes as (1). In
(5) and (6), mr is the half of the width of a face
detected.
For example, in our experiments, the size of a
Figure 3: Image Processing relations.
cx int
mr 0.25
, cy intmr 0.15
(4)
intmr 0.55 (5)
intmr 0.55 (6)
nose region is 77x77 pixels. The size of a mouth
region is 126x77 pixels.
The region of interest of a moth region is set as a
lower part of a real mouth region. Based on the place
of a nose, upper region of a mouth does not move
much. The movements of an upper region of a mouth
is mainly a deformation.
The lower region of a mouth moves largely
vertically with the open and close of a mouth. Of
cause, with the vertical movement, there are
deformation also. Our face skins move continuously.
We define the move of a mouth as the relative
motion of a lower part of a mouth based on the nose
position. With block-matching, we have large number
of motion vectors. Our system ignores the horizontal
motions, So, we have the set of vertical motions. The
position deference of a nose is defined as the average
of vertical difference of block-matchings.
The motion of a mouth is defined as the average
difference between the motion of a mouth and the
motion of a nose. A nose is not move in a face, so the
motion of a nose represents the motion of a face.
The result of block matching is a set of two-
dimensional vector that represent the motion of each
block. The motion of a nose is defined with the mode
of the result of block matching.
The decision about the motion of a mouth is done
intmr 0.9 (2)
Precise Estimation of Reading Activities with Face Image and Read Aloud Voice
319
with the threshold defined with the width of the
face region detected.
There are 6 to 12 years old pupils in primary
schools. There is a difference of the distance between
a camera and a face. As a result, there must be a
change of a scale. For robustness about the scale
change, the threshold changes rationally with the
scale of a face.
4.3.3 Experiments about Mouse Motion
Detection
We have three experiments about mouse motion
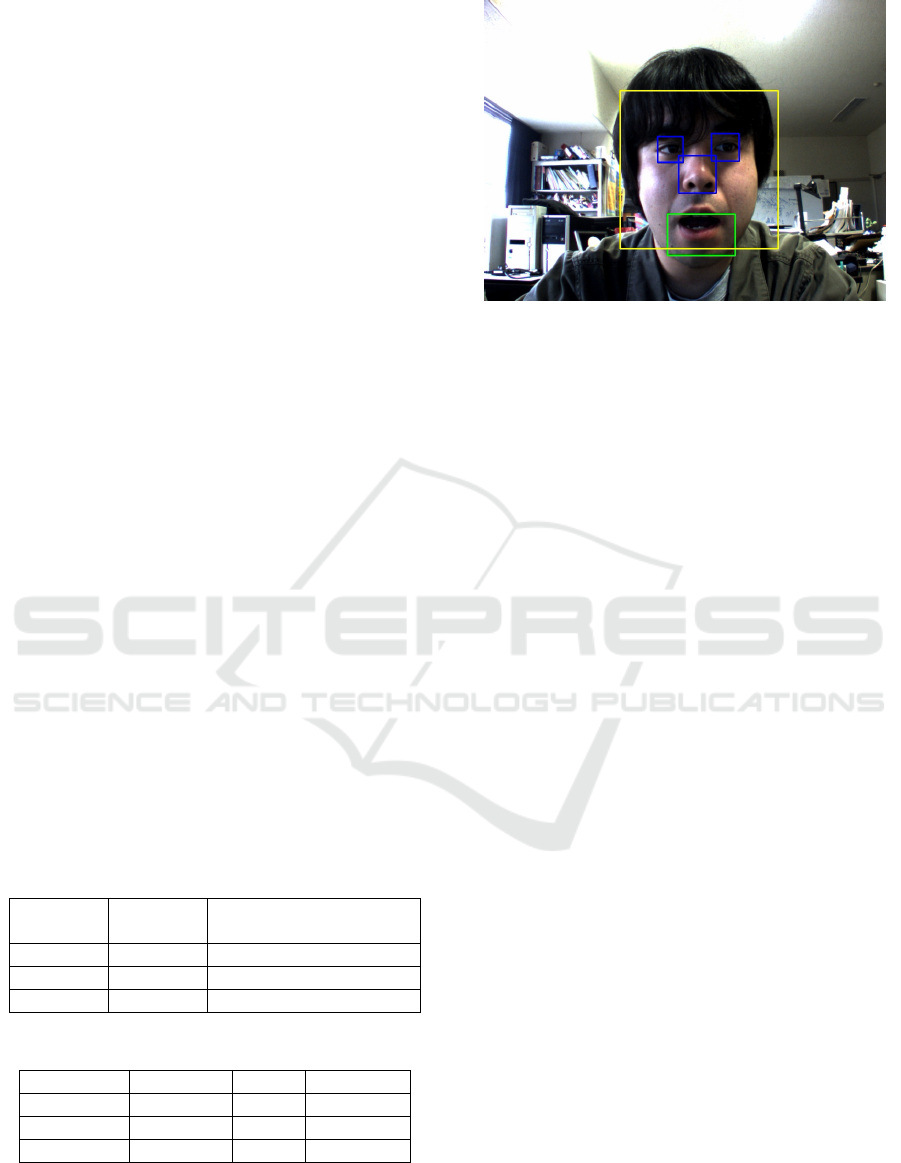
detection. Figure 4 shows the results of mouth region
detections. In the figure,a yellow box is detected face
region. Blue boxes show the eyes and a nose. A green
box represents the mouth region.
Table 1 shows length of mouth movement in each
experiment. Table 2 shows the performances of the
three experiments about mouth movement detection.
The F-values of all three experiments are larger than
0.8. The performance of mouth movement detection
is good enough.
4.4 Reading Aloud Detection
From the sound processing, we have the utterance
period. If the user in front of a camera really read
aloud, there must be a motion of the mouth of the user
and the utterance of the user. Therefore, the system
decides that the read aloud activity is in the period
when both of the mouse movements and the utterance
are detected.
The detection of a read aloud voice is simple.
When a microphone catches a sound that is louder
than a threshold, our system decides that there is a
sound of read aloud voice.
Table 1: Length of mouth movement.
Experiment
#
Length
(seconds)
Length of mouth movements
(seconds)
1 19.93 9.250
2 22.40 12.00
3 18.07 5.33
Table 2: Performance of mouth movement detections.
Experiment # Precision Recall F-value
1 0.926 0.758 0.833
2 0.889 0.865 0.877
3 0.875 0.824 0.848
Figure 4: Mouth and face detection.
4.4.1 Experiments
In vivo, experiments to estimate the system’s
performance must be large. Therefore, it is difficult to
execute. This paper makes the experiments in vitro.
In the experiments, there are a user in front of a
camera and a microphone, and the others interfere
with their voices at the side of the user outside of the
sight of the camera and near enough the microphone.
There are three types of experiments. One
experiment has no interfere. Only a user read aloud a
text. In another experiment, a user read aloud only the
odd-numbered parts and an interfere read only the
even-numbered parts. In another experiment, a user
read aloud only the odd-numbered parts, and only
moves his mouth without voice at the even-numbered
parts.
Figure 5 shows the results of mouth movement
detection and sound detection without interfere. In the
figure, horizontal scal is time in second. Vertical scale
represent Yes/No. Large waves represent the result of
sound detection. Small waves represent the result of
mouth movements. The dots do the timing of key
operations.
Figure 6 shows the results in the experiment with
interfere. In the odd-numbered parts, both of sound
and mouth movements are detected. In the even-
numbered parts, only sounds are detected.
Figure 7 shows the results with irregular mouth
movements. In the odd-numbered parts, both of sound
and mouth movements are detected. In the even-
numbered parts, there is no detection of sounds.
In all these three experiments, the decision about
read aloud activities are correct. There is no fail
decision.
4.5 Sound Processing
The microphone of a PC catches the voice of a user.
We can have a reading aloud voice. However, in a
CSEDU 2017 - 9th International Conference on Computer Supported Education
320

Figure 5: Result of mouth movements detection and sound detection.
Figure 6: Result of mouth movements detection and sound detection.
Figure 7: Result of mouth movements detection and sound detection.
normal class room, there are many pupils. Multiple
pupils read aloud simultaneously. In the case, a cheap
microphone of a PC catches voices of many pupils. It
is not easy to distinguish the voices of other pupils.
If we have a time while a user is speaking, we can
catch the feature of a user. When we have the feature
of the voice of a user, we can distinguish the voice of
the user from other voices.
4.5.1 Precise Reading Activities from Sound
When we have a reading aloud voice, we can estimate
the timing of reading activity precisely. However, a
user can make some mistakes about pronunciations.
Japanese texts have Hiragana, Katakana, and Kanji
characters. The pronunciation of Hiragana and
Katakana is strictly defined. There is a little mistake
about the pronunciations of Hiragana and Katakana.
Kanji characters have multiple pronunciations. They
are two types of pronunciations. One type is Kunyomi,
and the other is Onyomi. The Kunyomi is the old
Japanese word that represents the same meaning of
the Kanji character. The onyomi is the pronunciation
of the Kanji character in old china.
Some users make wrong pronunciations about
Kanji characters. It is difficult to recognize the
pronunciations. We treat a voice as the sequence of
phonemes. Of cause, there are errors in a sequence of
phonemes. We must find the correspondence between
the sequence of phonemes of read aloud voice and the
sequence of phonemes that represents the proper read
aloud voice of a text.
We use weighted edit distance to find the proper
correspondence between the sequence of phonemes
of read aloud voice and the sequence of phonemes
that represents the proper read aloud voice of a text
(Levenshtein, 1966).
Proposed system calculates weighted Levenshtein
distance and finds the correspondence between the
sequence of phonemes of read aloud voice and the
sequence of phonemes that represents the proper read
aloud voice of a text. If there is a few reading errors,
the system finds the proper correspondence. In the
case, the system finds the part of reading errors and
the types of the reading errors.
There are four types of reading errors that we treat.
One is a simple pronunciation error. This type of an
error leads a substitution of phonemes between a read
aloud voice and a text. Another one is a skip over of
a part of a text. In this case, the skipped part is deleted
from a text. The last one is a rereading of a part of a
text. In the case, the rereaded part are inserted into a
text.
The proposed system estimates these types of
errors in user’s reading activities. This helps to
understand user’s reading activities precisely.
Precise Estimation of Reading Activities with Face Image and Read Aloud Voice
321

Table 3: Correspondence between the text and the read aloudvoice with some pronousation errors.
Process C C C C I I C C C C C C O O C C C C C C C
Phonemes
of a text.
m u sh i * * s a g a sh i o sh i m a sh i t a
Recognized
Phonemes
m u sh i r o s a g a sh i * * * m a sh i t a
similarity o o o o x x o o o o o o x x x o o o o o o
4.5.2 Experiments about Precise
Understanding about Read Aloud
Voice
For measuring the performance of the proposed
system, we make some experiments about read aloud
voice processings. The experiments are four types.
One type is that a user reread some parts of a text
correctly. Another one is that a user read aloud some
parts of a text with wrong pronunciations. Another
one is that a user skips over some parts of a text. The
last one is that the system cannot process user’s
pronunciations with noises or other causes.
We show one of four experimental results in a
table. Table 3 shows the case that has pronunciation
errors. In table 3, there are some insertions and
deletions. Insertions are represented as ‘*’ in a text.
Deletions are represented as ‘*’ in a sequence of
phonemes of a read aloud voice.
These experiments shows that the system can
understand properly the relation between the parts of
a text and the parts of read aloud voices. With this
relations, we can understand the reading activities of
a user much more precisely. The understanding
includes the timing of read aloud and the correctness
of read aloud voices.
5 CONCLUSION
With a cooperative measurement of audio and video,
the proposed system can estimate the precise reading
activities of a user. Our previous works only uses the
total reading time for understanding the types of
reading activities. However, there is a limitation for
understanding the reading activity. Our new
cooperative measurements of audio and video enables
to understand the reading activities based on the word
chunk that is used for processing a text. The key
operation that represents the intension of reading next
part. The read aloud timing represents the types of
reading activities. The precise understanding of
reading activities can help to find proper assisting
method for pupils with reading difficulties.
We need to measure reading activities of many
pupils in next steps.
ACKNOWLEDGEMENTS
This work is supported with JSPS16K01057 and
JSPS16K04818.
REFERENCES
Aoki, K., Murayama, S. and Harada, K. (2014). Automatic
Objective Assessments of Japanese Reading Difficulty
with the Operation Records on Japanese Text
Presentation System. CSEDU2014, vol. 2, pp.139-146,
Barcelona, Spain.
Aoki, K. and Murayama, S. (2012). Japanese Text
Presentation System for Persons With Reading
Difficulty -Design and Implementation-. CSEDU2012,
vol.1, pp. 123-128, Porto, Portugal.
Aoki, K., Murayama S., Aoki, S. and Tashiro, S. (2016).
Recognition of Reading Activities and Reading Profile
of User on Japanese Text Presentation System,
Computer Supported Education, 7th International
Conference, CSEDU 2015, Lisbon, Portugal, May 23-
25, 2015, Revised Selected Papers, pp. 57-80. Springer.
Aoki, K., Tashiro, S. and Aoki, S. (2016). PRECISE
UNDERSTANDIG OF READING ACTIVITIES -
Sight, Aural, and Page turning-”, 8th International
Conference on Computer Supported Education, Rome,
Italy, April.
Julius, (2016). https://github.com/julius-speech/julius.
Levenshtein A. (1966). Binary Codes Capable of
Correcting Deletions, Insertions and Reversals, Soviet
Physics Doklady, vol. 10, no. 8, pp. 707-710.
Mecab (2016).
http://mecab.googlecode.com/svn/trunk/mecab/doc/ind
ex.html?sess=3f6a4f9896295ef2480fa2482de521f6.
OpenCV (2016). http://opencv.org/.
Pyglet (2016). http://pyget.com/about.html.
Python (2016). https://www.python.org/.
CSEDU 2017 - 9th International Conference on Computer Supported Education
322
