
Run-time Software Upgrading Framework for Mission Critical
Network Applications
Seung-Woo Hong, Seong Moon and Ho-Yong Ryu
ETRI (Electronics and Telecommunication Research Institute), 218 Gajeongno, Daejeon, Korea
Keywords: Live Software Upgrade, Run-time Upgrade, Mission-critical.
Abstract: In mission critical and safety software applications such as internet infrastructure, telecommunication,
military and medical applications, service continuity is very important. Since for these applications it is
unacceptable to shut-down and restart the system during software upgrade, run-time software upgrade
techniques, which are deployed for online maintenance and upgrades without shutdown the system, can
meet the demand for high levels of system availability and service continuity. However, upgrading an
application while it is running without shut-down is a complex process. The new and the old component
may differ in the functionality, interface, and performance. Only selected components of an application are
changed while the other parts of the application continue to function. It is important to safeguard the
software application’s integrity when changes are implemented at runtime. Various researchers have
employed different tactics to solve the problem of run-time software upgrade such as compiler-based
methods, hardware-based method, and analytic redundancy based. In order to ensure a reliable run-time
upgrade, we designed and implemented a software framework based run-time software upgrading method,
which has the ability to make runtime modification is considered at the software architecture-level. In this
paper, we present the software component architecture for run-time upgrade and software upgrade
procedure, and then show the implementation results.
1 INTRODUCTION
In information technology, high availability refers to
a system or component that is continuously
operational for a desirably long length of time. The
high availability for continuous service is important
in safety critical software applications such as
internet infrastructure, aero-space, tele-
communication, military and medical applications,
since monetary loss, interruption of service and
unpredictable damage can be caused with any
moment of software failure. However, software
change is unavoidable, because the software
requirements change, a bug is bound or optimisation
and enhancement of functionality is discovered. To
upgrade the software for these reasons, halting
execution of the existing software and restarting
with new one is inevitably involved, and those
upgrading approach results in software outage and
service interruption (Jeff, 1996; Tewksbury, 2001).
The purpose of run-time software upgrade
technique is to dynamically upgrade the behaviour
of a running software system without the software
outage and service interruption. Various researchers
have employed different tactics to solve the problem
of run-time software upgrade such as component
based (Jeff, 1996; Peyman, 1993), process based
(Deepak, 1993), analytic redundancy based
(Jonathan, 1999; Mike, 1996), distributed object
based (Tewksbury, 2001; Louise, 2000), dynamic
module based (Michael, 1997; Wilson, 1991; Donn
1990; Drossopoulou, 2002; Yu, 2002), and compiler
patch based (Chen, 2007; Fahmi, 2008; Neamtiu,
2006; Makris, 2009; Chen, 2016). But, in the real
fields most general and widely used way to achieve
the run-time software upgrade is through the use of
replication that is based on redundant hardware
(Deepak, 1993). The basic idea is that two machines
are available, ‘A’ and ‘B’. The both machines run
same application software, and software of machine
‘A’ runs as active role to provide actual application
service while ‘B’ runs as standby role. The state of
‘A’ and ‘B’ should be synchronized by some kind of
synchronization mechanism such as check-point
service. If the software needs to be upgraded,
standby B is brought up running the new software
Hong, S-W., Moon, S. and Ryu, H-Y.
Run-time Software Upgrading Framework for Mission Critical Network Applications.
DOI: 10.5220/0006355007270732
In Proceedings of the 19th International Conference on Enterprise Information Systems (ICEIS 2017) - Volume 2, pages 727-732
ISBN: 978-989-758-248-6
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
727
while active ‘A’ still provides the application
service. After upgrade of standby ‘B’, switch-over of
the role take place and B runs as active role to
provide new application service with new software.
The problem of redundant hardware basis is the
expensive solution and, it still has retaining problem
of transferring the state information, more precisely,
how to extract relevant state information from old
software, and transformed to be compatible with and
injected into new software (Yu, 2003).
In this article, we propose the run-time software
upgrading method that avoids temporary interruption
caused by a software upgrade by allowing the
system to be updated on-the-fly without hardware
redundancy. We focus on software architecture
based approach, and designed and implemented run-
time software upgrade framework. The proposed
framework provides dynamic software component
architecture, communication model between
dynamic software components and run-time module
upgrading procedure.
2 RUN-TIME UPGRADE
To support run-time software upgrade, we designed
run-time software upgrade framework. In the
framework, a software component is defined as
single software process that performs role of a
specific application role. Inter-process
communication between the software components is
done via message passing based on socket or
message queue. This section describes the internal
software architecture of dynamic component and
gives details of software upgrade procedure.
2.1 Software Component Architecture
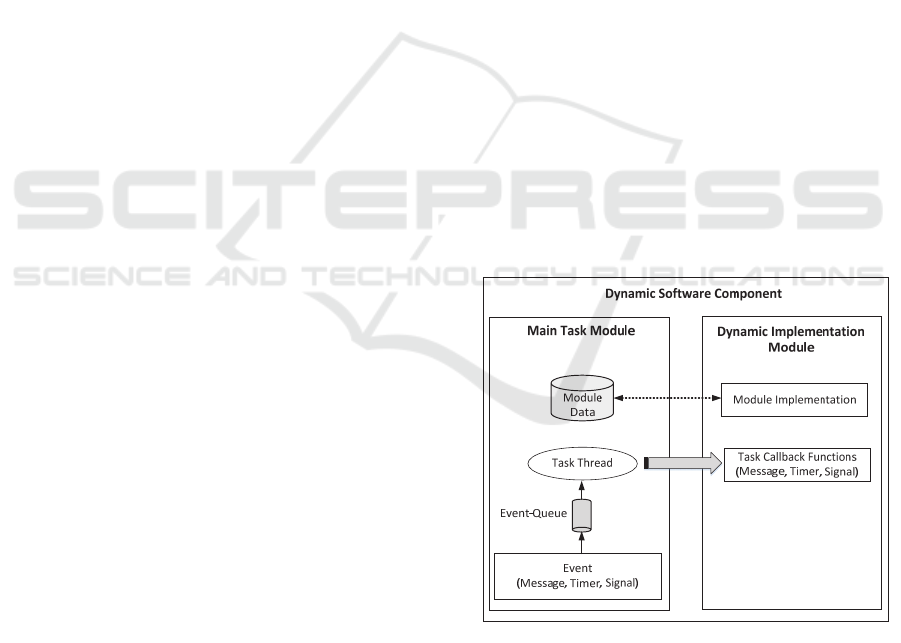
Figure 1 shows internal architecture of dynamic
software components that supporting run-time
software upgrading. The dynamic software
component consists of two modules. The first one is
main task module, which is persistent and
unchangeable part of a component while the
component process is running. The other is a
dynamic implementation module that performs
application specific functions and can be updated
dynamically. Detailed characteristics of the modules
are described as follows:
Main Task Module: The module consists of
singe task thread, and the thread serves as main loop
to process incoming events such as request message
from other component, timer event caused by time
expiration and signal event from kernel. All events
are buffered by event-queue, and the single thread
dispatches the events one by one and processes it
sequentially. As mentioned before, this module is
unchangeable part of component, and it controls
upgrading procedure of user dynamic
implementation module, that is, it swaps old user
module with new one when updating dynamic
implementation module. In addition, it manages the
user module data to preserve the consistency of state
after update.
Dynamic Implementation Module: This
module, as dynamic module, includes all the
application specific implementation. It can be
updated on the fly while main task module is still
running. The module consists of task call-back
function and user module implementation. The task
call-back function includes a set of statically defined
call-back functions such as process-message,
process-timer and process-signal. Basically, it
connects task thread and module implementation.
The task thread re-maps reference of the task call-
back functions whenever dynamic module is
changed, and then the connection between main task
module and dynamic implementation module can be
retained. To support run-time evolution, we make
the module in form of packaged shared library in
order to load and unload dynamically in a run-time
environment.
Figure 1: Architecture for dynamic software component.
Figure 2 depicts an example of message
communication between dynamic component A and
B, and shows how the component processes
incoming request messages as bellow.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
728
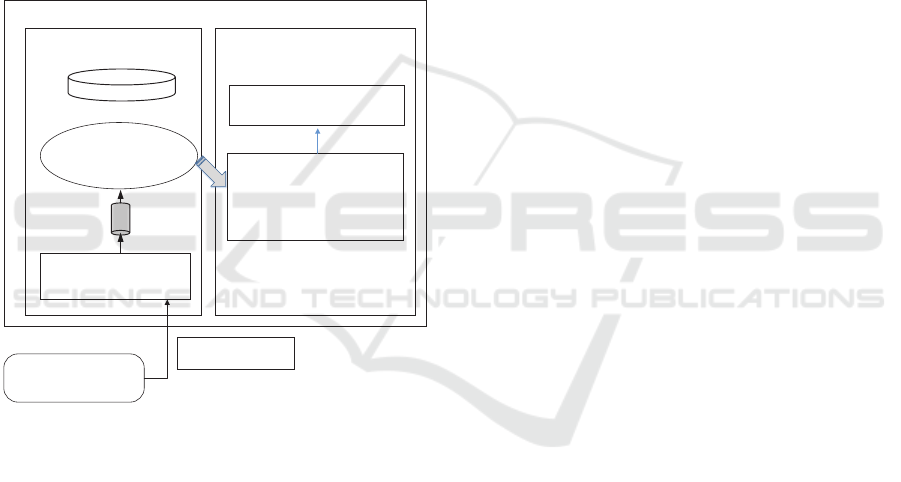
1. Component ‘A’ sends a request message via
certain kind of inter process communication
method. In case of the example, we use
socket with specific port number.
2. A socket bound to the port number is
triggered in the kernel, which notify to
component.
3. The task thread inputs the socket event into
FIFO event-queue.
4. The task thread also dispatches one event
from event-queue, and if the event is type of
message, it calls process-message call-back
function in task call-back functions module.
5. The called process-message call-back
function calls a user defined message
processing function, which is defined by
module implementation.
Component A
Main Task Module
Dynamic Implementation
Module
4. Task Thread
calls a task message
callback function
Task Callback Functions
(5. call implementation
processMessage function)
Dynamic Component B
3. Input
event-queue
2. Receive message
via socket
Module Data
Module Implementation
1. Send Message
Figure 2: Example of message processing.
Processing procedures for timer and signal event
almost same as the message except that user can
register and un-register certain amount of time to be
expired. To maintain data consistency between old
and new user module, we preserve user module data
inside main task module and the task thread provides
reference of data to user implementation module
when the user module is loaded. Therefore we don’t
have any synchronization of module data between
old module and newly upgraded module in our
upgrade framework.
2.2 Software Upgrade Procedure
To deal with module replacement, creation and
removal, we define a sequence of operations
between main the task module and the dynamic
implementation module as blows:
INIT: the task tread calls this operation to user
module when dynamic user module is initially
loaded in order to make the new user module
to initialize application specific functions.
TERM: the task tread calls this operation to
user module when upgrade is needed or when
process need to be terminated. The dynamic
user module should stop its work immediately.
HOLD: the task tread calls this operation to
user module before starting upgrade, which
requests that the user module should be in
quiescent state.
RESTART: the task tread calls this operation
to user module after loading the new user
module, which inform that the new user
module restart its function with restored data
reference.
Figure 3 shows the procedure for unloading old
dynamic implementation module and loading new
dynamic implementation module. First, to upgrade
to new dynamic module, new dynamic module need
to be compiled as shared library and located in
software repository. And then, user can trigger
upgrade procedure by command line interface which
sends upgrade request message to target software
component. The task thread of the target component
starts upgrade procedure as blows:
1. The task tread of the target component
checks the incoming message, and if the
message is upgrade request, then it starts
dynamic upgrade procedure.
2. The task thread calls TERM operation to
stop the old module, and subsequently it
calls HOLD operation to make the old
module to be in quiescent state.
3. The task thread unloads old module from
memory. Function of target software
component is temporarily stopped while the
upgrading, but no incoming events are lost
since those events will be queued in event-
queue.
4. After then, the task thread load new module
package into memory. Remapping procedure
between main task and new user module is
described in Figure 4.
5. After loading the new module, the task
thread starts remapping procedure because
address reference of task call-back functions
of new module might be different from old
Run-time Software Upgrading Framework for Mission Critical Network Applications
729
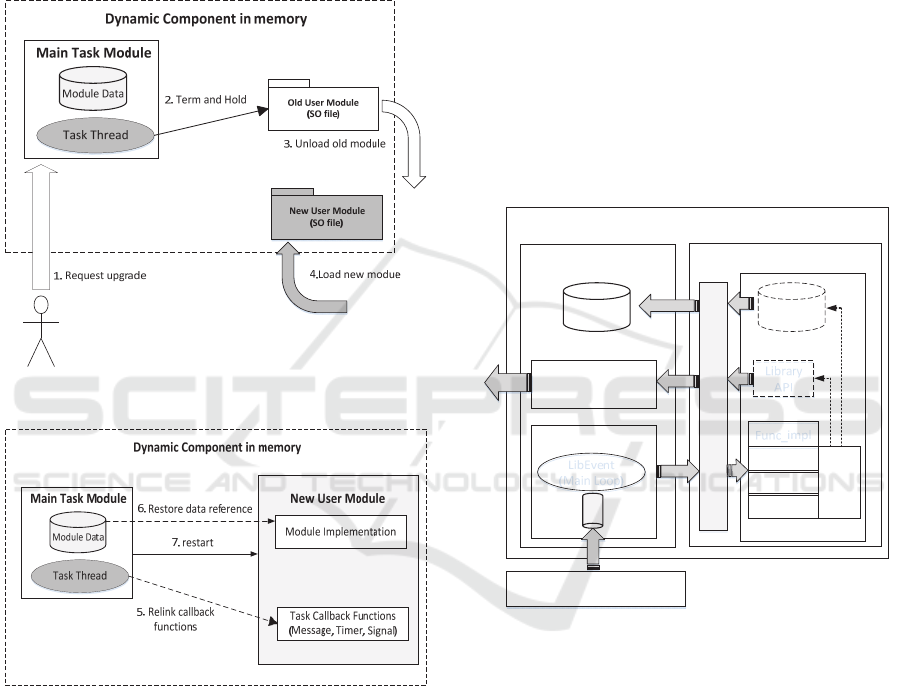
one. The task tread relinks all the defined
static call-back functions of new user module.
6. The task manager restores reference of user
data by sending the reference through
remapped task call-back functions.
7. The task tread calls RESTART operation to
allow new module to start its application
functions. And the task thread starts to
dispatch queued event from event-queue.
Figure 3: Unload old module and load new module.
Figure 4: Re-mapping between main task and user
module.
3 IMPLEMENTATION RESULTS
3.1 Implementation Environment
As mentioned above, we implemented the main task
module as main process of program that is main part
of our run-time software upgrade framework. To
make main event loop that is used for processing
every event such as IPC message by network sockets,
timer expired event, signal triggered by kernel, and
so on, we utilized the well-known libevent software
library. The libevent provides a mechanism to
execute a call-back function when a specific event
occurs on a file descriptor including socket or after a
timeout has been reached, and it also support call-
back triggered by signals and regular timeouts. As
shown in Figure 5, the main task module forms
single threaded event loop by libevent and every
event from outside of dynamic component are
dispatched through event-dispatch function which
subsequently calls the event-receive functions such
as receive-message, receive-timer and receive-signal
function in dynamic module. In our implementation
framework, the main task module also has various
libraries API including IPC message, memory
handling, logging, and so on, therefore user who
wants make dynamic component only take care of
application logic itself in dynamic module.
Main Task (a.out)
Dynamic Module (lib.so)
Dynamic Component
Event
(Message, Timer, Signal)
Main Task Thread
LibEvent
(Main Loop)
Event
Queue
Library API
(IPC, Mem, Log, etc)
IPC
Module
Data
Data
Reference
Library
API
Func_impl
Recv_Ipc()
Recv_evt()
Recv_sig()
Symbol Mapper
work
Figure 5: Implemented architecture of dynamic
component.
We realize the dynamic implementation module
as type of shared library because the shared library
are intended to be shared by executable modules and
loaded into memory at load time or run time rather
than being copied by a linker when it creates a single
monolithic executable program. The only way to get
into dynamic module is through implemented event-
receive function in dynamic module, then every
request or event for dynamic module is coming
though event loop in main task module. As
mentioned earlier, the main task module constructs
symbol mapping table called symbol mapper
between main task module and dynamic module
whenever it loads dynamic module. We have three
symbol mapping table in symbol mapper, the first
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
730
one is event-receive symbol mapping that is used for
connection while event-dispatch, second one is
library API symbol mapping and third one is
permanent module data reference mapping. For
dynamic linking between main task module and
dynamic implementation module, POSIX’s DL
(dynamic loaded) libraries such as dlopen, dlsym
and dlclose are used. The dlopen loads new data and
code of dynamic implementation module into a
component process’s address space, and the dlsym
provides a mechanism to locate functions in the
dynamic implementation module by name, and
dlclose unload old dynamic implementation module.
As a result, main task module and dynamic module
can be separately compiled and produce each binary
module. The main task module forms an executable
program and the dynamic module takes the form of a
shared library as shown in Figure 5.
3.2 Test Results
Test application is network router system that is one
of core element of internet network infrastructure. A
router is connected to two or more date lines from
different networks. When a data packet comes in on
one of the network lines, the router reads the address
information in the packet to determine the ultimate
destination. To decide the destination of packet, all
of router maintains its own routing table that is
created by routing protocol software such as RIP
protocol. In case of upgrading the routing protocol,
network operator should shut down the old routing
protocol and restart the new routing protocol, which
results in losing current routing table and network
connection is down until the new routing protocol
newly constructs new routing table. The objective of
the test is that routing protocol does not lose its
routing table after upgrading with our run-time
software upgrading framework.
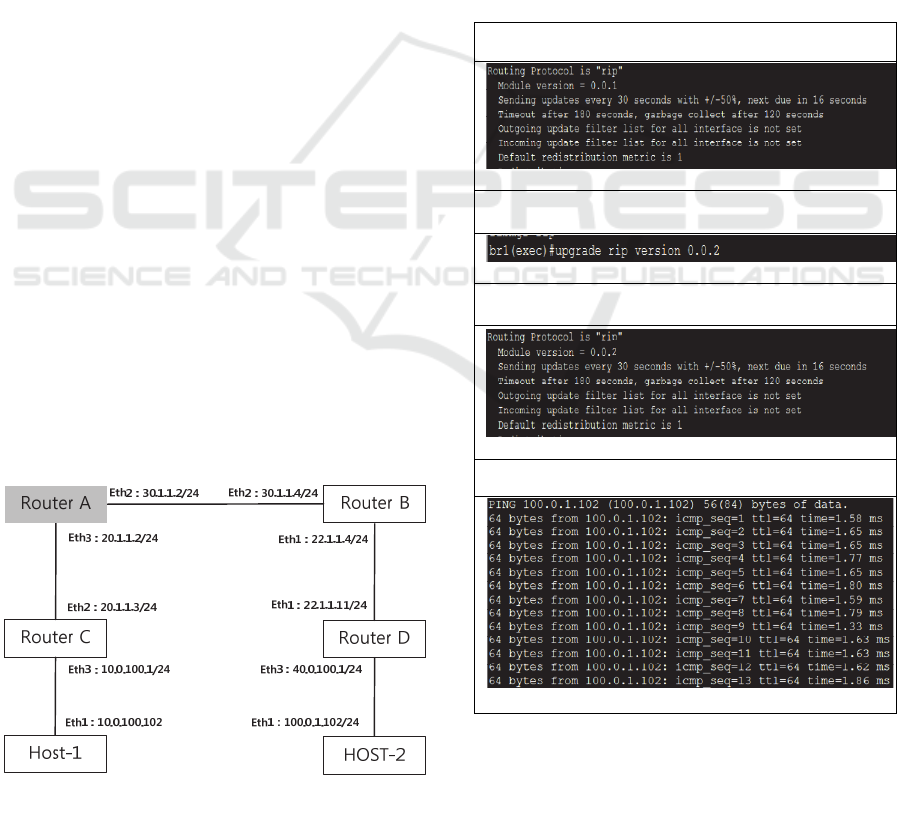
Figure 6: Test network environment.
Figure 6 shows test network environment. There
are RIP router A, B, C and D, and two hosts Host-1
and Host-2. Four RIP routers provide a connection
path between two hosts. All of routers already make
their own routing table and connection check is done
by testing ping between Host-1 and Host-2.
Furthermore we continue to send ping messages to
Host-2 from Host-1 to confirm a connection path
during upgrade. The ping messages will be stopped
if network connection is down, which means RIP
protocol in route A loses its routing table during
upgrade. We have the CLI (Command Line Interface)
that is used to configure RIP protocol’s parameters
or show current status of the protocol. Table 1 shows
CLI commands and the results of status of the
protocol. The current module version of RIP is 0.0.1
and new version is 0.0.2 as shown in Table 1. We
Table 1: Test results.
CLI shows old RIP module (librip_0.0.1.so).
CLI to upgrade to version 0.0.2.
CLI shows new RIP module (librip_0.0.2.so).
ping result to Host-2 during upgrade.
dynamically upgrade RIP component from old
librip_0.0.1.so to new librip_0.0.2.so through CLI
command in RIP router ‘A’. We can see that Host-1
still receives ping response from Host-2, and
Run-time Software Upgrading Framework for Mission Critical Network Applications
731

connection path is preserved, which means that RIP
router ‘A’ still has its routing state consistency after
changing the dynamic module.
4 CONCLUSIONS
Service continuity is very important in mission
critical and safety software application such as
internet infrastructure, telecommunication, military
and medical applications, since these applications
above, it is unacceptable to shut-down and restart the
system during software upgrade. The purpose of
run-time software upgrade technique is to
dynamically upgrade the behaviour of a running
software system without the software outage and
service interruption. In this article, we present a run-
time software upgrading method based on software
architecture. We proposed the software framework
for dynamic software module architecture and run-
time module upgrading procedure. Also, we
implemented the proposed scheme and show results
of run-time upgrading via network router software.
In future work, we will focus on further enhanced
features such performance measurement and dealing
with the case that user data structure is changed in
run-time.
ACKNOWLEDGMENTS
This research was supported by the IT R&D program of
MSIP (Ministry of Science, ICT and Future Planning) /
IITP (Institute for Information & Communication
Technology Promotion). [R0101-16-0070, Development
of The High Availability Network Operating System for
Supporting Non-Stop Active Routing]. This research was
supported by the National Research Foundation of Korea
(NRF-2012R1A1A2044460).
REFERENCES
Jeff Magee and Jeff Kramer, “Dynamic Structure in
Software Architectures,” Fourth SIGSOFT
Symposium on the Foundations of Software
Engineering (FSE), pp. 3-14, San Francisco, October
1996.
Peyman Oreizy and Richard N. Taylor, “On the Role of
Software Architectures in Runtime System
Reconfiguration,” Proceedings of the International
Conference on Configurable Distributed Systems
(ICCDS 4), Annapolis, Maryland, May 1998.
Deepak Gupta and Pankaj Jalote, “Increasing System
Availability through On-Line Software Version
Change,” Proceedings of 1993 IEEE 23rd
International Symposium On Fault-Tolerant
Computing, pp. 30-35, August 1993.
Jonathan E. Cook, Jeffrey A. Dage, “Highly Reliable
Upgrading of Components”, IEEE/ACM International
Conference on Software Engineering (ICSE ’99),
pp.203-212, Los Angeles, CA. 1999.
Mike Gagliardi, Raj Rajkumar, and Lui Sha, “Designing
for Evolvability: Building Blocks for Evolvable Real-
Time Systems,” In Proceedings of the IEEE Real-time
Technology and Applications Symposium, pp. 100-
109, June 1996.
L. A. Tewksbury, Louise E. Moser, P. M. Melliar-Smith,
“Live Upgrades for CORBA Applications using object
replication,” IEEE International Conference on
Software Maintenance, pp488-497, Florence, Italy,
Nov. 2001.
Louise E. Moser, P. M. Melliar-Smith, P. Narasimhan,
L.A. Tewksbury, V. Kalogeraki, “Eternal: fault
tolerance and live upgrades for distributed object
systems,” Proceedings of IEEE information
Survivability Conference and Exposition (DISCEX
2000), Vol.2, pp184-196, 2000.
Michael Franz, “Dynamic Linking of Software
Components”, IEEE Computer, Vol. 30, No. 3, pp. 74-
81, March 1997.
W. Wilson Ho and Ronald A. Olsson, “An approach to
genuine dynamic linking”, Software-Pratice and
Experience, Vol. 21, No. 4, pp. 375-390, April, 1991.
Donn Seeley, “Shared Libraries as Objects,” USENIX
Summer Conference Proceedings, pp. 25-37, 1990.
S. Drossopoulou and S. Eisenbach, Manifestations of
Dynamic Linking, The First Workshop on
Unanticipated Software Evolution (USE 2002),
Málaga, Spain, June 2002.
L. Yu, G.C. Shoja, H.A. Muller, A. Srinivasan. "A
Framework for Live Software Upgrade", Software
Reliability Engineering, 2002, ISSRE 2003,
Proceedings. pp. 149 - 158.
H. Chen, J. Yu, R. Chen, B Zang. "POLUS: A POwerful
Live Updating System", 29th International Conference
on Software Engineering, May 2007, ICSE'07.
S. Fahmi, H. Choi, “Life Cycles for Component Based
Software Development”, IEEE 8th International
Conference on Computer and Information Technology
Workshops, July 2008, CIT Workshop 2008.
I. Neamtiu, M. Hicks, G. Stoyle, and M. Oriol, “Practical
dynamic software updating for C,” in Proc. ACM
SIGPLAN Conf. Program. Language Design
Implementation, 2006, pp. 72–83.
K. Makris, R. Bazzi, “Immediate multi-threaded dynamic
software updates using stack reconstruction”, Proc.
Conf. USENIX Annu. Tech. Conf., 2009, p. 31.
Kristis Makris, Rida A. Bazzi, Immediate multi-threaded
dynamic software updates using stack reconstruction,
Proceedings of the 2009 conference on USENIX
Annual technical conference, p.31-31, June 14-19,
2009, San Diego, California.
G. Chen, H. Jin, D. Zou, Z. Liang, B. B. Zhou, H. Wang.
"A Framework for Practical Dynamic Software
Updating", IEEE Transactions on Parallel and
Distributed Systems, April 1 2016, pp. 941-950.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
732
