
Sensor Fusion for Semantic Place Labeling
Roman Roor
1
, Jonas Hess
2
, Matteo Saveriano
2
, Michael Karg
1
and Alexandra Kirsch
3
1
BMW AG, Munich, Germany
2
Department of Electrical and Computer Engineering, TU M
¨
unchen, Munich, Germany
3
Department of Computer Science, Eberhard Karls Universit
¨
at T
¨
ubingen, T
¨
ubingen, Germany
Keywords:
Semantic Place Labeling, Context, Sensor Fusion, Feature Extraction, Classification, Machine Learning,
Smartphone, Autonomous Driving Vehicles, V2V, V2X, GPS.
Abstract:
In order to share knowledge about road situations vehicle-to-vehicle (
V2V
) communication is used. Au-
tonomous driving vehicles are able to drive and park themself without driver interactions or presence, but
are still inefficient about the drivers needs as they don’t anticipate the users’ behaviour. For instance, if a user
wants to stop for quick grocery shopping, there is no need looking for long term parking in far distance, a
short-term parking zone near the grocery shop would be adequate. To enable autonomous cars to make such
decisions, they could benefit from awareness of their drivers’ context. Knowledge about a users’ activities and
position may help to retrieve context information. To be able to describe the meaning of a visited place for user,
we introduce a variant of semantic place labeling based on various sensor data. Data sourced by, e.g. smart-
phones or vehicles, is taken into account for gathering personalized context information, including Bluetooth,
motion activity, status data and
WLAN
, and also to compensate for potential inaccuracies. For the classification
of place types, over 80 features are generated for each stop. Thereby, geographic data is enriched with point
of interest (
POI
)-information from different location-based context providers. In our experiments, we classify
semantic categories of locations using parameter optimized multi-class and smart binary classifiers. An overall
accuracy of 88.55% correctly classified stops is achieved using END classifier. A classification without
GPS
data yields an accuracy of 85.37%, demonstrating that alternative smartphone data can largely compensate
for inaccurate localizations based on the fact of 88.55% accuracy, where
GPS
data was used. Knowing the
semantics of a location, the provided context can be used to further personalize autonomous vehicles.
1 INTRODUCTION
With today’s high penetration of smartphone devices
– capable of accurately monitoring movement, loca-
tion, communication, and information consumption
– and comparable low effort internet access, mobile
communication has become ubiquitous. Furthermore,
the latest vehicle generations of several manufactur-
ers are capable of sensing data and access the internet.
Hence, in the last few years, vehicle-to-vehicle (
V2V
)
and vehicle-to-everything (
V2X
) communication has
become more important than before. A person can
have several reasons visiting a location at different day-
times. For instance, a multi-floor building houses su-
permarkets and restaurants. Around midday on work-
ing days a person is likely to have one hour lunch,
however, in the evening a person might be more likely
to visit this place for quick grocery shopping. Fur-
thermore, the vehicle can tell other drivers about esti-
mated departing times, to avoid unsystematic parking
space searching. The understanding of user behaviour
and anticipation of next user actions is of high rele-
vance for autonomous driving vehicles. One highly
researched sub-field of intelligent vehicles is the auto-
matic generation of recommendations based on user
preferences and user habits. For instance, a built-in
digital assistant can recommend a parking space de-
pending on the predicted duration of stay: a free of
charge parking garage in close distance to a building
for lunch or a paid short-term parking zone nearby for
grocery shopping.
With today’s development progress of cars and
smartphones, an unprecedented amount of data can
be captured and processed, providing direct measure-
ments of human behavior and the surrounding environ-
ment (Dashdorj and Sobolevsky, 2015), and offering
an enormous potential of better understanding users
context. One step towards assessing the user context
is the semantic identification of a user’s whereabouts,
e.g., the user’s home, workplace, preferred restaurant.
Roor, R., Hess, J., Saveriano, M., Karg, M. and Kirsch, A.
Sensor Fusion for Semantic Place Labeling.
DOI: 10.5220/0006365601210131
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 121-131
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

A purely location based identification (using Global
Positioning System (
GPS
)) of place types the user vis-
its yields unsatisfying results in some cases. For ex-
ample, in areas with a dense accumulation of different
types of places, even a slightly inaccurate localization
might lead to false conclusions. Thus, we propose a
framework to record a comprehensive number of sen-
sor and state values of smartphones. This framework
does also predict a person’s semantic location context
taking the recorded sensor and state data into account.
In the further text, we will call the classification of the
meaning of a place visited by a user semantic place la-
beling. In order to precisely classify places, descriptive
features for each place type are extracted by feature se-
lection algorithms. The multi-class classification prob-
lem has also been divided into a set of 2-class clas-
sification problems, producing an ensemble of smart
binary classifiers.
Since our framework processes sensitive user data,
privacy concerns are justified. The focus of this work
is of a technical background. Thus, we will not cover
research questions about data privacy concerns, but we
encourage for further research about this topic.
Summarizing, the main contributions of this pa-
per are as follows: (a) a novel, comprehensive set of
features (user behaviour and environmental features)
for classification of place types; (b) a novel method-
ology based on smart binary classifiers to solve the
multi-class classification problem with intelligent pre-
selected features; (c) duration-specific smart binary
classifiers for exploiting inter-feature correlations.
2 RELATED WORK
The Nokia Lausanne data collection campaign
(
LDCC
) dataset is the basis of the Mobile Data Chal-
leng (
MDC
), a challenge for students with different
tracks. One
MDC
task was semantic place predic-
tion (Laurila et al., 2013). Since the
LDCC
dataset
isn’t fully labeled, the predicted meaning of a place
couldn’t truly be validated, but only estimated. The
winner of the semantic place prediction task achieved
a 10-fold cross-validation accuracy of 75% using Gra-
dient Boosted Trees classification (Kiukkonen et al.,
2010). Zhu et al. focused on generating as many fea-
tures as possible and let their algorithm decide about
the most relevant features (Zhu et al., 2012).
Microsoft Research Asia released a dataset col-
lected by 178 participants in Beijing, China. The unla-
beled dataset, called GeoLife, was logged by
GPS
log-
gers the users were equipped with (Yu Zheng, 2011).
Based on this dataset, Ghosh et al. have developed the
THUMP framework to analyze large
GPS
traces, clus-
ter trajectories using geographic and semantic informa-
tion to identify different categories of people regard-
ing the theory that people move with intent (Ghosh
and Ghosh, 2016). Further, the authors in (Lung et al.,
2014) show that next location prediction, using the
same dataset, can be improved using behavior seman-
tic mining. In (Bar-David and Last, 2014), the authors
show a context-aware location prediction algorithm
trained and tested on the GeoLife dataset. Due to miss-
ing labels and incomplete information (
GPS
only) this
dataset doesn’t fit our needs for semantic place label-
ing.
In 2004, the Massachusetts Institute of Technol-
ogy (
MIT
) launched a data collection challenge called
Reality Mining Project at their campus using Nokia
6600 phones running a logging app, that is capable
to record
GPS
, Bluetooth, cell tower IDs, and appli-
cation usage. This dataset is not as comprehensive as
the
LDCC
dataset, unlabeled, and not widely spread in
science (Eagle and Pentland, 2006). Another dataset
containing only
GPS
data is INFATI. Jensen et al. have
equipped 24 cars – mainly located in Aalborg, Den-
mark – with
GPS
logging equipment for two months
in 2001 (Jensen et al., 2004). Like the aforementioned
datasets, this also does not fit our needs.
Other studies on semantic place labeling so far
(Reddy et al., 2010; Consolvo et al., 2008; Arase et al.,
2010; Bouten et al., 1997; Perrin et al., 2000; Junker
et al., 2004; Preece et al., 2009; Berchtold et al., 2010;
Ravi et al., 2005; Bao and Intille, 2004; Chang et al.,
2007; Farringdon et al., 1999; Kern et al., 2003; Man-
tyjarvi et al., 2001; Stikic et al., 2008; Zinnen et al.,
2009; Lester et al., 2005; Siewiorek et al., 2003) are
mostly based on unlabeled data or on a small number
of sensor and state data. The field of physical activ-
ity recognition based on accelerometer sensor data is
well researched (Consolvo et al., 2008; Arase et al.,
2010; Berchtold et al., 2010; Bao and Intille, 2004;
Farringdon et al., 1999; Kern et al., 2003). Accura-
cies of physical activity recognition could be achieved
up to 90% (Reddy et al., 2010; Preece et al., 2009;
Ravi et al., 2005; Bao and Intille, 2004; Chang et al.,
2007; Mantyjarvi et al., 2001), but the current average
smartphone has more sensors built in than only a ac-
celorometer. Thus, our research focuses on exploiting
as many sensor and state values our algorithms need to
detect the semantic of a place for a user using sparse
data to not unnecessary drown the battery. In contrast
to previously mentioned publications, we focus on se-
mantic place labeling, which it is not well researched,
instead of activity recognition.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
122

Figure 1: Our self developed Mobility Companion App for
Android based smartphones used for ground truth data col-
lection. The timeline view shown of identified stops for se-
lected date extended with labeling possibilities for places
and transportation modes.
3 DATA
A logging application for Android based smartphones
was developed and distributed via Google Play Store
to a diverse range of users, co-workers and friends of
the authors, who agreed to participate in our data log-
ging challenge. A broad range of smartphone sensors
and status are recorded:
• accelerometer
•
Bluetooth (MAC, bond state, name, type, class,
connection)
• Google activity recognition API
• GPS
•
phone status data (airplane mode, Android version,
cell service, phone model, phone plug, plug status,
ringer mode)
•
wireless local area network (
WLAN
) (
BSSID
,
SSID, capabilities, frequency, level)
In addition to automatic sensor logging, the partici-
pants of our experiment were required to label all vis-
ited places and, albeit not relevant for this case, com-
mutes as shown in fig. 1. While labeling places, se-
mantic descriptions of the corresponding locations
can be selected by the participants. The user can
choose between home, education, work, friend & fam-
ily, hotel, restaurant, nightlife, grocery store, shopping,
sport medical, leisure, transportation infrastructure
and other.
The collected app data is stored in our central
database server. To lower the barriers for users to par-
ticipate in this data collecting challenge, the Mobility
Companion app should behave inconspicuous while
Table 1: Distribution of stops. Instances of place type gro-
cery store and shop are merged into shop due to ambiguity
of terms. Instances from place types Hotel, leisure and med-
ical are ineligible for classification due to being underrepre-
sented.
Place Type
Instances
home 707 38%
education 107 6%
work 344 19%
friend & family 237 13%
restaurant 177 10%
nightlife 59 3%
shop 85 4%
sport 81 4%
transportation infrastructure 55 3%
Total 1852 100%
running as a background task on the users’ phone. One
important criteria is to not drown the battery more
than necessary. To achieve this, several battery sav-
ing strategies were implemented. Sparse data record-
ing due to a low logging frequency in combination
with geofences can reduce the battery usage to under
10%. Most sensor values are logged once between ev-
ery 45 seconds and 15 minutes. The logging frequency
is adapted by our power saving algorithm based on the
user’s behaviour.
Data collection happened in a period over 183
days in 2016. Over 19 users have contributed their
logged data. Although the majority of users are located
around Munich, Germany, the recorded data exhibits
stops amongst a variety of countries, e.g., Hong Kong
and Philippines. We consider the data of a user as valid
if a minimum of 30 labeled stops of the correspond-
ing user is collected, which is roughly equivalent to
movements of one week.
In total, 1852 labeled stops (see tab. 1) of a total
duration of 6700 hours were eligible for classification
of which 90% contain motion activity data, 58% Blue-
tooth data, 88% WLAN data and 99% phone status
data (e.g. ringer- and airplane mode). Places of types
grocery store and shop were not distinct enough for
many data collectors. Thus, we decided to merge in-
stances of these two labels into shop. Instances from
place types hotel, Leisure and medical are underrepre-
sented – only 3% of all instances – and could not be
used for classification, to avoid over- or underfitting.
Sensor Fusion for Semantic Place Labeling
123
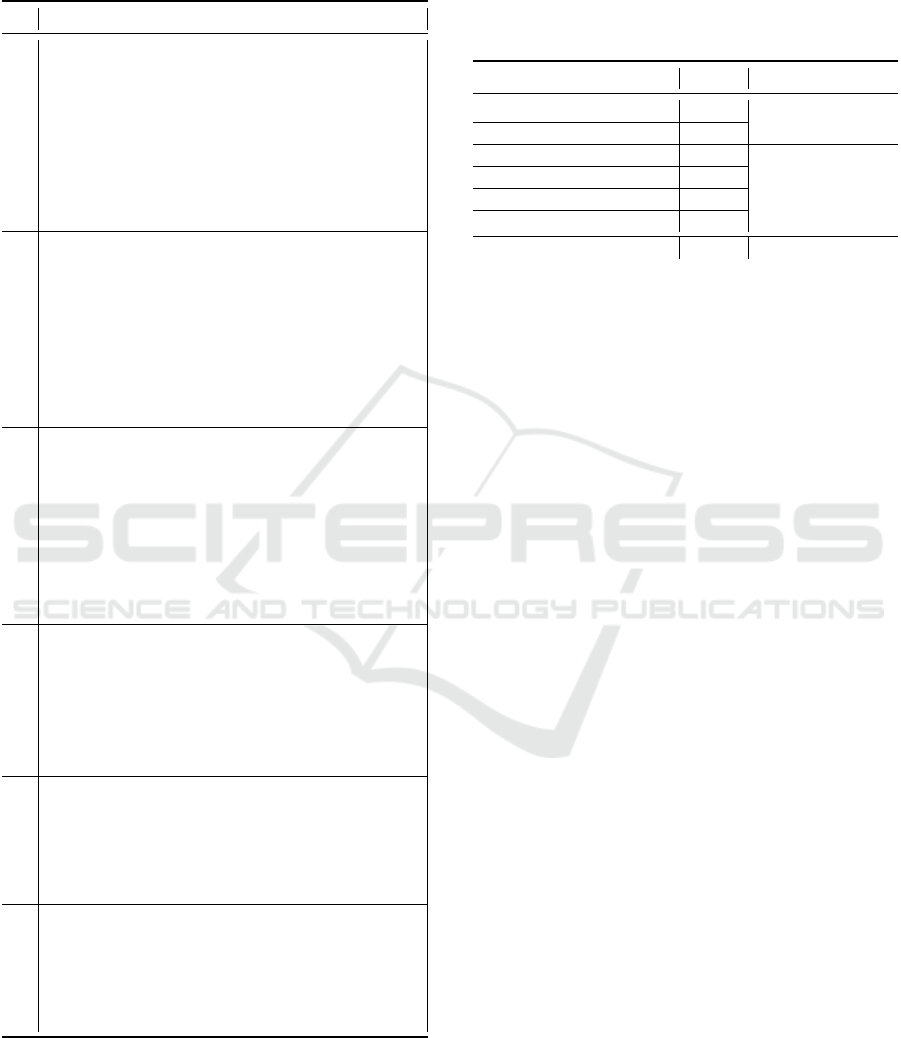
Table 2: Extracted features per stop grouped by category.
Based on the data logged by the Mobility Companion app
and additional data sources, all of the listed features are gen-
erated and used for classification.
Feature per stop
activity
absolute duration
{
in vehicle, on bicycle, running,
still, tilting, unknown, walking}
relative duration
{
in vehicle, on bicycle, running,
still, tilting, unknown, walking}
predominant activity
second most predominant activity
activity index {current, preceding, succeeding}
frequency of activity change
{
current, preceding,
succeeding}
settings & status
average cell service signal strength
has been plugged in
predominant plug type
predominant ringer mode
ringer mode has been changed
share of time
{
airplane mode, cell service available,
unplugged}
share of time plugged {AC, USB }
share of time ringer mode
{
normal, silent, vibrate
}
stop & time
absolute duration of {cluster this day, stop}
is stop after shop closing time
is workday
predominant {preceding, succeeding} place type
share of time
{
airplane mode, cell service available,
unplugged}
time of day as middle of stop
total share of night time spent at this cluster
total share of time spent at this cluster
WLAN
average network type
{
overall, strongest networks
only}
average network type of connected network
connected to educational network
educational network nearby
number of unique {BSSIDs, SSIDs} nearby
share of time connected to a WLAN network
Bluetooth
detected devices, share of type
{
audio video, com-
puter, health, imaging, misc, networking, peripheral,
phone, toy, uncategorized, wearable}
most connected type of Bluetooth device
number of unique Bluetooth devices nearby
share of time connected to a Bluetooth device
geographic
distance to nearest
{
railway, road, road or railway
}
is close to {railway, road}
most likely place type based on POI
POI
-probability of place type
{
home, education,
work, friend & family, restaurant, nightlife, shop,
sport, transport infrastructure}
Table 3: Every activity type as possible return value of
Google’s activity recognition
API
is mapped to an activity
index and linked to an activity group in respect to its move-
ment intensity. The values are designed by us to reflect the
activity’s motion intensity. Thus, it is possible to calculate
an average activity index for each stop based on the user’s
activities.
Activity type Index Activity group
still 0 Non-translational
movementstilting 1
walking 4
Translational
movements
running 7
on bicycle 9
in vehicle 10
unknown – –
4 CLASSIFICATION FEATURES
4.1 User Behaviour
4.1.1 User Activity
Physical user activity can be characteristic for a place
type. For instance, at work or in a restaurant one is
less likely to move than in the gym or a shop. An-
droid has a built in Google application programming
interface (
API
) for activity recognition, which yields
a probability distribution over activity categories: still,
tilting, walking, running, on bicycle and in vehicle.
Several features were extracted based on the deter-
mined activity categories, see tab. 2 (activity).
The activity categories were mapped to an activity
index ranging from 0 to 10 reflecting the activity’s mo-
tion intensity as shown in tab. 3. Generally, the more
translational the activity is the higher is the activity
value.
The frequency of activity changes is calculated
as a function of number of changes between non-
translational movements and translational movements,
divided by a fixed interval of 30 minutes. The fre-
quency changes feature can help to determine place
types with usually a high activity, e.g., shop, in con-
trast to low activity place types, e.g., restaurant. Due to
battery saving strategies the activity recognition
API
is
not recorded continuously, but up to every 45 seconds.
4.1.2 Smartphone Settings and Status
The way a smartphone is used can give indications
about whereabouts. Typically the smartphone settings
correlate with place types, for instance, active airplane
mode at home during nighttime and silent ringer mode
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
124

Figure 2: Information about predicted preceding place types
can improve classification accuracy. To further improve ac-
curacy preceding place types are reclassified once using in-
formation of predicted succeeding place types.
at work. For each stop, the features listed in tab. 2
(settings & status) are extracted for classification.
4.1.3 Stop and Time
Over the course of the day, many stops are visited in
which the sequence is often not random. Friend & fam-
ily is often visited after work and leaving a shop is
followed by the place type home in most cases. To em-
brace such correlations, the predominant place type
in the 2 hours before the stop and the predominant
place type in the 2 hours after the stop are calcu-
lated. Once succeeding place types have been clas-
sified, classification information can be retrieved and
used to reclassify preceding place types to improve
accuracy. Reclassification is limited to 1 iteration in
this case. This concept is illustrated in fig. 2. For prac-
tical reasons, information about the preceding and suc-
ceeding place types are available from the beginning
but falsified along confusion matrices of the classifier,
since all stops are potentially subject to false classifica-
tion. For the preceding place types, a confusion matrix
is used that originates from a classification without
any knowledge about preceding and succeeding place
types. For the succeeding place type a confusion ma-
trix is used that originates from a classification with
falsified knowledge of preceding place types and no
knowledge about succeeding place types. This way,
we simulate uncertainty about succeeding place types.
As in a real world scenario, succeeding place types are
unknown before visit.
With respect to time information, additional fea-
tures are used. Spatial and temporal information usu-
ally correlate, for instance, it’s normal to be at home
during nighttime. To assess such relations, features as
listed in tab. 2 (stop & time) are extracted.
4.2 Environment
4.2.1 WLAN
Due to a high penetration of
WLAN
s, the existing
WLAN
access points (
AP
s) infrastructure is used, for
instance, for
GPS
localization improvement. Such net-
works have assigned a service set identifier (
SSID
), the
broadcasted name of the network, and a basic service
set identifier (
BSSID
), an unique identifier of the
AP
.
Thus, we extract absolute number of unique
BSSID
s
and SSIDs as features.
Furthermore,
WLAN
are differentiated between
private and enterprise networks by the type of au-
thentication, the number of
AP
s and used frequencies.
WLAN
s in e.g. households often consist of one
AP
. In
contrast, companies run networks consisting of several
AP
s with different
BSSID
s, but the same
SSID
and
support Extensible Authentication Protocol (EAP).
In 2003 the eduroam initiative started and aims to
give students free
WLAN
access around the world.
Only
WLAN
s in educational facilities are emitting
eduroam as
SSID
. Regarding this fact, there is a high
likelihood the place is of educational nature if an
eduroam
SSID
is detected. Applying all these rules
the features listed in tab. 2 (WLAN) are extracted.
4.2.2 Bluetooth
In reference to
WLAN
features, Bluetooth devices in
the immediate vicinity are scanned to extract the fea-
tures listed in tab. 2 (Bluetooth).
4.2.3 Cell Service
At some places there can be very characteristic cell
service levels. To investigate if this also applies for
place types cell service features are extracted (see tab.
2 (settings & status)).
4.2.4 Geographic Environment
In conjunction with Foursquare and Google Places –
two comprehensive
POI
providers – information about
nearby places can be exploited. Every detected stop is
a result of several closely aligned coordinate pairs. A
cluster shape (determined through all coordinate pairs
within a certain range that were detected during a stop),
and a centroid are calculated for every stop. The cen-
troid is used to query Foursquare and Google Places
for
POI
within a range of 50m (average localization
inaccuracy within buildings).
POI
-based probability will be derived for each
place type. First, places that are not opened throughout
the stop’s duration are excluded. Second, a weight
w
k
Sensor Fusion for Semantic Place Labeling
125

Figure 3:
POI
around a distance of 50m around the stop clus-
ter shape’s centroid are queried from Foursquase and Google
Places, symbolized as red and green places. Distance to the
stop’s cluster and popular times are taken into account in the
probability calculation while deriving
POI
-based probabil-
ity. POIs outside the opening hours are excluded.
is calculated for each place type
k
using eq. 1, taking
into account each place’s distance to the cluster area in
a quadratic sense and whether they were popular dur-
ing the stops time frame, as specified by Foursquare.
w
k
=
n
k
∑
i=1
1 + β
α · dist
k,i
2
, (1)
where
β
is an additional popularity and
α
is an addi-
tional distance factor. In this case, we set
α = 2
and
β = 0.5
for popular else
β = 0
for unpopular times.
The distance between the stop’s cluster shape and a
POI i
of place type
k
is expressed by
dist
k,i
, as depicted
in fig. 3. Finally, to calculate the
POI
-based probabil-
ity for each place type
p
k
eq. 2 is used and reduced by
a correction factor γ.
p
k
=
w
k
∑
N
k
w
k
· γ , where γ = 1 − (
dist
min
dist
max
)
2
(2)
To avoid that even distant
POI
receive an unrealistic,
high probability,
γ
ranges from 0 to 1 and adjusts the
probability distribution for situations where no
POI
s
are found in defined maximum distance
dist
max
to the
cluster shape. It is calculated by the distance of the
overall nearest detected place
dist
min
and the maximal
possible distance dist
max
= 50m.
Most probable POI-based place type as additional
feature is derived from overall
POI
-probabilities of
place types. Towards transportation infrastructure
place types, features are generated exploiting Google’s
Roads and Overpass Rails. All extracted geographic
features are listed in tab. 2 (geographic).
5 IMPLEMENTATION &
EVALUATION
The database and the features described in the earlier
sections are used for evaluation of different classifica-
tion algorithms and strategies. For training and testing
of each classification model, we apply 10-fold cross-
validation. Unless otherwise described, default param-
eter settings of algorithms from Waikato Environment
for Knowledge Analysis (
Weka
)
1
are used for evalua-
tion.
5.1 Multi-class Classification
A multi-class classification setup is the direct applica-
tion of a classifier on the dataset with optional fea-
ture selection prior to the classification. We com-
puted results using 23 different classifier algorithms
implemented in
Weka
. Fig. 4 shows results of the 6
best performing algorithms. Trying to obtain best re-
sults,
Weka
’s default parameters of END, Rotation For-
est, Logit Boost and Random Comittee were tuned.
These algorithms are ensemble classifiers that include
a learning subsystem which is iteratively adapted with
experience. Hence, to tune the algorithms we subse-
quently raised the iterations from 10 (default) to over
500. Best results, also in respect to computation time,
were achieved with 500 iterations.
A general feature selection can be performed ad-
ditionally prior to classification. Here, the
PCC
is
used as measurement of relevance, and calculated as
weighted average of class-specific correlation between
features and place types. All features that carry a cor-
relation value below 0.05 were removed, leaving only
features that were related to one or multiple place
types. However, the results in fig. 4 show minimal
or even a negative improvement of accuracies. This
demonstrates the algorithms’ intrinsic ability to assess
features’ relevance. The 3 most distinguishing features
per place type, according to PCC, are shwon in tab. 4.
5.2 Binary Classification Setup
For a very individualistic setup regarding feature se-
lection a binary classification model is trained. The
END classifier uses a similar concept to break down
multi-class problems into a set of binary classification
problems in terms of performance improvement. In
this setup,
PCC
information between each feature and
place type are used. For each class, features with a
PCC
value below a specific threshold are removed to
avoid potential wrong classification. After feature se-
lection for each place type, the classes are classified
individually.
For each of those classifications, all instances of
the respective other classes are grouped into an op-
posing class. Then, the classifier is trained and tested
with the target class and the opposing class. Thereby,
1
http://www.cs.waikato.ac.nz/ml/index.html; Version
3.8.0
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
126

Figure 4: Benchmarks of best performing classifiers in a multi-class setup using implementations of
Weka
with default
parameter settings and 10-fold cross-validation, but adjusted iterations to 10 and 500 iterations. The
LMT
algorithm has a
self-optimized number of iterations, the exact number is unspecified. Simple Logistic is by default well-tuned and uses 500
iterations. Feature selection prior to classification shows no significant impact.
for each tested instance, a probability value is given
to the target class. The same instance is tested with
each class and the class with the highest probability
is chosen as predicted class. This is how a multi-class
problem is transformed into a set of binary-class prob-
lems.
The
PCC
threshold affects the results as shown
in fig. 5 for the top classifiers. Thereby, a perfor-
mance improvement is achieved in case of the Ran-
dom Committee and Rotation Forest. Logistic Model
Trees (
LMT
) and Simple Logistic obtained lower ac-
curacies.
5.3 Binary Classification Setup with
Duration-specific Model Building
The binary setup described before is limited in the way
that features are evaluated in one-dimensional view as
only correlations between features and place types are
considered, while correlations between features are
neglected. For instance, a user only stopping at a gym
is less likely to plug in his phone for charging and
a short stop at a friend’s place usually has a higher
activity index than a long stop.
In respect to this assumption, a duration specific
model is built consisting of two classifiers for each
place type, one for shorter and one for longer stops.
They are trained in parallel with the same instances
and features except for those whose inner correlation
values with the stop’s duration are above a specified
threshold. Such features are trained only to either one
of the classifiers, respectively to the stop’s duration.
Thus, a trade-off for the gained training-potential is
the decrease of training instances for duration-specific
features, which can result in increased effects of under-
and over-fitting of the duration-specific models.
Also, the classification accuracy depends on the
specified threshold value for the
PCC
between each
feature and the stop’s duration. To ensure different re-
sults, as with a purely binary setup, the value has to
be lower than 1.0. Otherwise, the features would be
trained not duration-specific. A fix correlation thresh-
old of 0.05 for correlation between features and place
types is used as this value achieves the overall best
results in the purely binary setup, as discussed earlier.
Fig. 5 shows percentage of correct classifications
for the top performing classifiers. In consequence of
low threshold values, training features for some of the
place types are thinned out and lead to poor classifica-
tion performance. Overall, compared to the multi-class
setup, the accuracy of the Rotation Forest and the Ran-
dom Committee shows significant improvements. For
all other classifiers compared to the multi-class setup,
this setup obtains slightly lower accuracies. Compared
to the binary setup, this setup achieves similar classifi-
cation accuracies.
6 DISCUSSION
Besides the best performing classifier END with an
overall accuracy of 88.55%, several other classifier
yielded similar results. Representatively, the perfor-
mance of the classifier END is discussed in this sec-
tion. Classification results of the classifier END are
shown in in tab. 5.
With the proposed setup, place types called home
and work can be clearly distinguished, resulting in a
true positive rate (
TPR
) of 0.989 and 0.93, a false posi-
tive rate (
FPR
) of 0 and 0.011, and a precision of 1 and
0.952 respectively. Similar values apply for place type
education, for instance,
FPR
is also above 0.93. One
reason for clearly distinguishing this place types are
the features about eduroam, which are only present at
educational places.
In contrast, a slightly lower
FPR
occurs for place
Sensor Fusion for Semantic Place Labeling
127
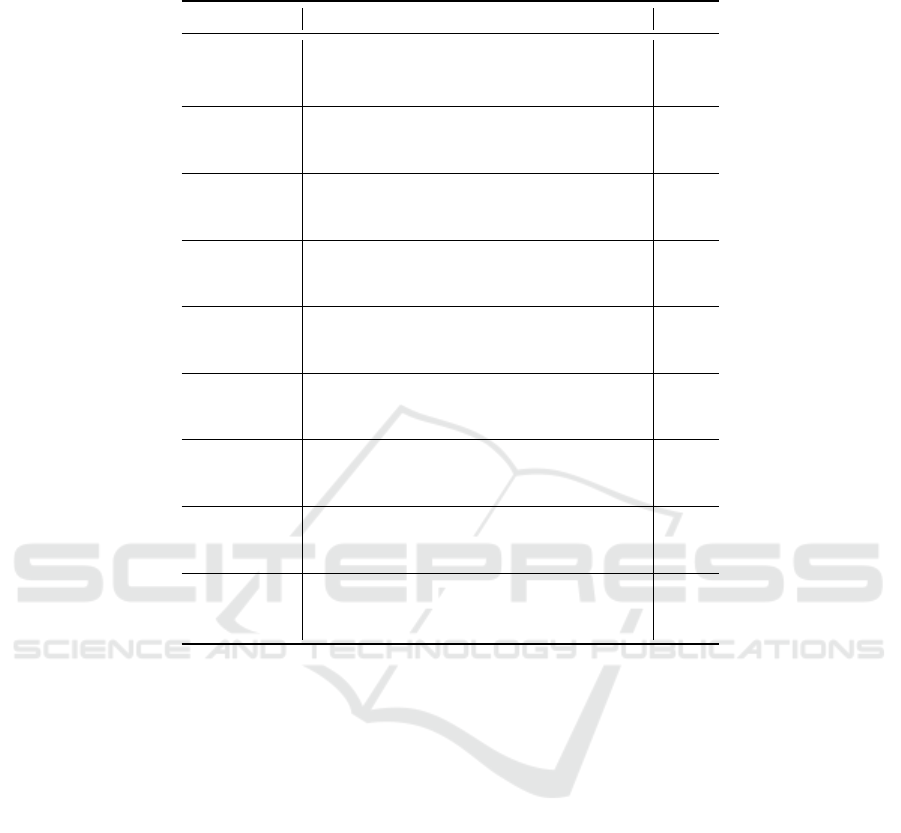
Table 4: Top three most distinguishing features per place type, measured by the Pearson product-moment correlation coefficient
(PCC).
Place type Feature PCC
home
total share of time spent at this cluster 0.91
total share of night time spent at this cluster 0.79
absolute duration of cluster this day 0.67
education
educational network nearby 0.76
connected to educational network 0.59
average network type overall 0.46
work
number of unique Bluetooth devices nearby 0.63
distance to nearest road 0.52
is stop after shop closing time
(1)
0.45
friend &
family
total share of time spent at this cluster 0.30
is workday 0.22
total share of night time spent at this cluster 0.21
restaurant
POI-probability of place type nightlife 0.36
total share of time spent at this cluster 0.31
absolute duration of cluster this day 0.31
nightlife
POI-probability of place type nightlife 0.23
relative duration unknown 0.21
frequency of activity change current 0.18
shop
POI-probability of place type shop 0.53
relative duration unknown 0.30
activity index current 0.27
sport
POI-probability of place type sport 0.28
share of time connected to a WLAN network 0.22
total share of time spent at this cluster 0.20
transport
infrastructure
POI-probability of place type transp. infrastr. 0.35
distance to nearest railway 0.29
activity index current
(2)
0.25
(1)
Shown instead of third most correlated feature ’distance to nearest road or railway’ due to its strong contextual overlap with
’distance to nearest road’.
(2)
Shown instead of third most correlated feature ’is close to railway’ due to its strong contextual overlap with ’distance to
nearest railway’.
type friend & family. Especially instances of sport ap-
pear to be difficult to distinguish from friend & family,
as they are the most misclassified place type for friend
& family. One reason is the low amount of distinguish-
ing sport-features that are available in all instances. In-
vestigating this case, it became clear that most of the
participants don’t take their smartphone to the gym or
secure it in the locker. Hence, sensor values are com-
parable to place type friend & family.
Similarly, restaurant shows a relative high
TPR
and has by far the highest
FPR
as well as the lowest
precision. This indicates a large overlap between fea-
tures of restaurant-stops and instances of other classes.
Depending on the user’s situation, stays at a restaurant
differ significantly in respect to activity profile, dura-
tion and time of visit. The purpose of visit can be,
for instance, a small meal in a hurry, a coffee only,
or a long dinner with subsequent drinks. Logged sen-
sor values are also highly dependent on the type of
restaurant. While having an extensive lunch or din-
ner at a normal restaurant the user is mostly sitting, in
contrast to a fast food restaurant with standing tables
only. Depending on the type of restaurant, the activity
profile will differ significantly. Moreover, restaurants
exist numerously and prevalently and are, in contrast
to other place type, registered at
POI
providers such
as Foursquare and Google Places. This can affect clas-
sification of other place types as restaurant, since in
immediate distance often a place of type restaurant is
detected. This may happen, because the users’ home is
above a restaurant, for stops in a multi-floor building
that houses a restaurant above or below users’ posi-
tion, at place types where it is a common part like
sport-related places or inaccurate recognized user po-
sition. The generated geographic features would take
this information into account and potentially suggest a
restaurant context. It becomes clear that several factors
can be the reason for this high
FPR
and low precision.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
128

Figure 5: Classification results of top binary classifiers and binary duration-specific (DS) classifiers. Chart shows correctly
classified instances in % for specific
PCC
thresholds. Solid lines indicates binary classifiers results. Dashed lines indicates
binary duration-specific results.
Table 5: Classification results of best-performing classifier END with 500 iterations and 10-fold cross-validation.
Place Type TPR FPR Prec. ROC F-Meas.
home 0.989 0.000 1.000 0.998 0.994
education 0.935 0.005 0.926 0.995 0.930
work 0.930 0.011 0.952 0.995 0.941
friend & family 0.844 0.024 0.840 0.985 0.842
restaurant 0.842 0.054 0.623 0.974 0.716
nightlife 0.441 0.002 0.867 0.971 0.584
shop 0.718 0.018 0.663 0.977 0.689
sport 0.691 0.005 0.875 0.979 0.772
transp. infrastr. 0.527 0.009 0.630 0.974 0.574
Weighted Avg. 0.886 0.012 0.894 0.990 0.885
Class nightlife contains up to 30% miss-classified
instances whereat places of type restaurant are the
evident majority. In addition to the classification diffi-
culties for place type restaurant, there is a contextual
difficulty. Often, there is a fine line between a nightlife
location, such as a bar, and a restaurant. Nightlife lo-
cations often offer small dishes and restaurants drinks,
two reasons for visiting early and staying late respec-
tively. Hence, the classification as either one of them
lies solely in context of visit. Due to these circum-
stances the
MDC
treated these two place types as
one (Laurila et al., 2013). The relative high precision
value of 0.867 suggests that distinguishing features
exist, since nightlife is classified correctly, both place
types can still be treated separately.
The instances of place type sport are often miss-
classified, due to a low amount of distinguishing fea-
tures recorded by our app. As mentioned before, the
smartphone is often stored in a locker while user is
actively moving. In many cases, no sports-related
POI
is found at sports location. As shown in fig. 6, almost
all instances that contain significant
POI
-probability
home education work friends&
family
restaur. nightlife shop sport transport
infrastr.
Predicted place type
0
20
40
60
80
100
POI-probability in %
Error distribution of sport-instances and POI-probability of type sport
Correct classification
False classification
Figure 6: Distribution of classified instances of place type
sport for the respective location-based POI-probability, this
type’s most correlated feature. In cases where the
POI
-
probability is near zero (almost no sports-related
POI
rec-
ognized) instances of sport often miss-classified.
for type sport are classified correctly. Vice versa, al-
most all wrongly classified instances did not contain
a significant
POI
-probability. The reason because dis-
proportionally many stops are misclassified as friend
& family is likely related to the fact that environments
and behaviors at places of friends can be relatively
feature-less as well with similar motion activity.
In the case of transport infrastructure almost the
Sensor Fusion for Semantic Place Labeling
129

Table 6: Comparison of additional benefit of feature groups
w.r.t. accuracy adding or removing specific feature groups
for model building with END. General stop and time features
are taken as basis, yielding 81.05% accuracy.
Feature Group
Stop & time feat.
and feat. group
All feat. except
feat. group
User activity 81.59% 87.91%
Settings & status 82.56% 88.17%
WLAN 84.23% 87.91%
Bluetooth 81.75% 88.39%
Geographic 86.88% 85.37%
half of the respective instances are classified correctly,
due to the low number of distinguishing features,
mainly driven by geographic information and user mo-
tion activity. As this is the class with the lower amount
of instances, the comparable low
TPR
can be inter-
preted as a cause of underfitting. Hence, more training
data is necessary for a reliable classification.
Additionally, the benefit of each feature group is
compared w.r.t. accuracy. The same setup of END is
used with feature group stop & time as basis, yield-
ing 81.05% accuracy. In contrast, using all features
an accuracy of 88.55% can be achieved as mentioned
before. The results in tab. 6 shows the significant con-
tribution of geographic data. While adding only this
feature group to the base feature group stop & time an
accuracy of 86.88% can be achieved. Furthermore, it
shows that non-geographic features are able to largely
compensate for an outage of geographic features, e.g.
in situations where an accurate localization isn’t pos-
sible. Taking every feature group into account except
Bluetooth, shows the minimal additional benefit this
feature group adds to accuracy.
7 CONCLUSION
Our research shows how semantics about users’ where-
abouts can be derived based on various sensor and
state values. This procedure, called semantic place la-
beling, is essential for context inference of everyday
user situations. Especially for autonomous driving ve-
hicles, knowledge about the users’ context is useful in
order to anticipate the users’ behaviour.
Hence, we have shown how to use our framework
to incorporate distributed sensor and state data and
classify types of places depending on users’ actions.
Semantic place labeling can distinguish different place
types even at the same location, for instance, housed
in a multi-floor building or even wrong logged coor-
dinates due to inaccurate localization, and derive their
semantics. The framework design has its focus on ex-
tensibility, so every sensor and state source can be at-
tached in order to gain more insight about user inten-
tions and to achieve a higher place type classification
accuracy.
Due to lack of freely available data sets, a highly
convenient Android based app for tracking of users’
behavior, environment and ground truth annotation
was developed (Kiukkonen et al., 2010; Laurila et al.,
2013; Yu Zheng, 2011). A sizeable amount of valid
data was collected and submitted by 19 participants
over a time span of 183 days. In this research, over
80 features with mixed relevance to place types are
generated per stop. Several classifiers were compared.
In the classification, up to 88.6% of test instances are
correctly classified across nine place types by END.
The evaluation has shown that even inaccurate lo-
cation data can be compensated with remaining fea-
tures, yielding an accuracy of 85.37%. As far as a
comparison can be drawn to related approaches, the
yielded prediction results are more accurate and classi-
fiers are generalizing better on less routine place types
than any other known approach (Zhu et al., 2012; Mon-
toliu et al., 2012; Ghosh and Ghosh, 2016; Bar-David
and Last, 2014).
The achieved classification accuracy of 88.6%
maybe not sufficient for autonomous driving vehicles.
Over 11 out of 100 actions of an autonomous driving
car based on anticipation of the users intentions can
still be false. Any false anticipated user intentions can
annoy the user and should be reduced to a minimum.
Hence, the next study should investigate what mini-
mum accuracy is needed to gain the users trust.
Future work will focus on (a) improvement of the
Mobility Companion app w.r.t. usability and power
consumption, (b) extension of the model, making use
of new features – for instance, knowledge about user-
user relation and relations between user activities and
local events – and data sources – for instance, dis-
tributed sensors (like vehicle sensors) – and (c) further
logging and publishing of our annotated dataset.
REFERENCES
Arase, Y., Ren, F., and Xie, X. (2010). User activity un-
derstanding from mobile phone sensors. In Proceed-
ings of the 12th ACM international conference adjunct
papers on Ubiquitous computing-Adjunct, pages 391–
392. ACM.
Bao, L. and Intille, S. S. (2004). Activity recognition
from user-annotated acceleration data. In Interna-
tional Conference on Pervasive Computing, pages 1–
17. Springer.
Bar-David, R. and Last, M. (2014). Context-aware location
prediction. In International Workshop on Modeling
Social Media, pages 165–185. Springer.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
130

Berchtold, M., Budde, M., Gordon, D., Schmidtke, H. R.,
and Beigl, M. (2010). Actiserv: Activity recognition
service for mobile phones. In International Symposium
on Wearable Computers (ISWC), pages 1–8. IEEE.
Bouten, C. V., Koekkoek, K. T., Verduin, M., Kodde, R., and
Janssen, J. D. (1997). A triaxial accelerometer and
portable data processing unit for the assessment of
daily physical activity. IEEE Transactions on Biomed-
ical Engineering, 44(3):136–147.
Chang, K.-H., Chen, M. Y., and Canny, J. (2007). Tracking
free-weight exercises. In International Conference on
Ubiquitous Computing, pages 19–37. Springer.
Consolvo, S., McDonald, D. W., Toscos, T., Chen, M. Y.,
Froehlich, J., Harrison, B., Klasnja, P., LaMarca, A.,
LeGrand, L., Libby, R., et al. (2008). Activity sensing
in the wild: a field trial of ubifit garden. In Proceed-
ings of the SIGCHI Conference on Human Factors in
Computing Systems, pages 1797–1806. ACM.
Dashdorj, Z. and Sobolevsky, S. (2015). Characterization of
behavioral patterns exploiting description of geograph-
ical areas. CoRR, abs/1510.02995.
Eagle, N. and Pentland, A. S. (2006). Reality mining: sens-
ing complex social systems. Personal and ubiquitous
computing, 10(4):255–268.
Farringdon, J., Moore, A. J., Tilbury, N., Church, J., and
Biemond, P. D. (1999). Wearable sensor badge and
sensor jacket for context awareness. In Wearable Com-
puters. Digest of Papers. The Third International Sym-
posium on, pages 107–113. IEEE.
Ghosh, S. and Ghosh, S. K. (2016). Thump: Semantic anal-
ysis on trajectory traces to explore human movement
pattern. In Proceedings of the 25th International Con-
ference Companion on World Wide Web, pages 35–36.
Jensen, C. S., Lahrmann, H., Pakalnis, S., and Runge, J.
(2004). The infati data. arXiv preprint cs/0410001.
Junker, H., Lukowicz, P., and Troster, G. (2004). Sampling
frequency, signal resolution and the accuracy of wear-
able context recognition systems. In Wearable Com-
puters, Eighth International Symposium on, volume 1,
pages 176–177. IEEE.
Kern, N., Schiele, B., and Schmidt, A. (2003). Multi-sensor
activity context detection for wearable computing. In
European Symposium on Ambient Intelligence, pages
220–232. Springer.
Kiukkonen, N., Blom, J., Dousse, O., Gatica-Perez, D., and
Laurila, J. (2010). Towards rich mobile phone datasets:
Lausanne data collection campaign. Proc. ICPS,
Berlin.
Laurila, J. K., Gatica-Perez, D., Aad, I., Blom, J., Bornet,
O., Do, T. M. T., Dousse, O., Eberle, J., Miettinen, M.,
Liao, L., Fox, D., and Kautz, H. (2013). From big
smartphone data to worldwide research: The Mobile
Data Challenge. The International Journal of Robotics
Research, 26(6):119–134.
Lester, J., Choudhury, T., Kern, N., Borriello, G., and Han-
naford, B. (2005). A hybrid discriminative/generative
approach for modeling human activities. In Proceed-
ings of the 19th International Joint Conference on Ar-
tificial Intelligence, pages 766–772.
Lung, H.-Y., Chung, C.-H., and Dai, B.-R. (2014). Predict-
ing locations of mobile users based on behavior seman-
tic mining. In Pacific-Asia Conference on Knowledge
Discovery and Data Mining, pages 168–180. Springer.
Mantyjarvi, J., Himberg, J., and Seppanen, T. (2001). Recog-
nizing human motion with multiple acceleration sen-
sors. In Systems, Man, and Cybernetics, IEEE Interna-
tional Conference on, volume 2, pages 747–752. IEEE.
Montoliu, R., Mart
´
ınez-Uso, A., Mart
´
ınez-Sotoca, J., and
McInerney, J. (2012). Semantic place prediction by
combining smart binary classifiers. In Nokia Mobile
Data Challenge Workshop., volume 1.
Perrin, O., Terrier, P., Ladetto, Q., Merminod, B., and Schutz,
Y. (2000). Improvement of walking speed prediction
by accelerometry and altimetry, validated by satellite
positioning. Medical and Biological Engineering and
Computing, 38(2):164–168.
Preece, S. J., Goulermas, J. Y., Kenney, L. P., Howard, D.,
Meijer, K., and Crompton, R. (2009). Activity identifi-
cation using body-mounted sensorsa review of clas-
sification techniques. Physiological measurement,
30(4):R1.
Ravi, N., Dandekar, N., Mysore, P., and Littman, M. L.
(2005). Activity recognition from accelerometer data.
In AAAI, volume 5, pages 1541–1546.
Reddy, S., Mun, M., Burke, J., Estrin, D., Hansen, M., and
Srivastava, M. (2010). Using mobile phones to de-
termine transportation modes. ACM Transactions on
Sensor Networks (TOSN), 6(2):13.
Siewiorek, D. P., Smailagic, A., Furukawa, J., Krause, A.,
Moraveji, N., Reiger, K., Shaffer, J., and Wong, F. L.
(2003). Sensay: A context-aware mobile phone. In
ISWC, volume 3, page 248.
Stikic, M., Van Laerhoven, K., and Schiele, B. (2008). Ex-
ploring semi-supervised and active learning for activ-
ity recognition. In 12th International Symposium on
Wearable Computers, pages 81–88. IEEE.
Yu Zheng, Hao Fu, X. X. W.-Y. M. Q. L. (2011). Geolife
GPS trajectory dataset - User Guide.
Zhu, Y., Zhong, E., Lu, Z., and Yang, Q. (2012). Feature
engineering for place category classification. Mobile
Data Challenge 2012.
Zinnen, A., Blanke, U., and Schiele, B. (2009). An analy-
sis of sensor-oriented vs. model-based activity recog-
nition. In International Symposium on Wearable Com-
puters, pages 93–100. IEEE.
Sensor Fusion for Semantic Place Labeling
131
