
Functionalities and Requirements of an Autonomous Shopping Vehicle
for People with Reduced Mobility
Ant
´
onio Neves
2
, Daniel Campos
1
, F
´
abio Duarte
1
, In
ˆ
es Domingues
1
, Joana Santos
1
, Jo
˜
ao Le
˜
ao
1
, Jos
´
e
Xavier
1
, Lu
´
ıs de Matos
1
, Manuel Camarneiro
1
, Marcelo Penas
1
, Maria Miranda
1
, Ricardo Silva
1
and Tiago Esteves
1
1
Follow Inspiration, Portugal
2
IEETA/DETI Universidade de Aveiro, Portugal
Keywords:
Robotics, Retail, Reduced Mobility, Requirements, Functionalities.
Abstract:
This paper concerns a robot to assist people in retail shopping scenarios, called the wGO. The robot’s be-
haviour is based in a vision-guided approach based on user-following. The wGO brings numerous advantages
and a higher level of comfort, since the user does not need to worry about controlling the shopping cart. In
addition, this paper introduces the wGOs functionalities and requirements to enable the robot to successfully
perform personal assistance while the user is shopping in a safe way. A user satisfaction survey is also pre-
sented. Based on the highly encouraging results, some conclusions and guidelines towards the future full
deployment of the wGO in commercial environments are drawn.
1 INTRODUCTION
This paper describes the design concerns and
decisions when the company Follow Inspira-
tion (de Matos, 2012) developing a robot to help and
assist people (giving special emphasis to people with
reduced mobility) in retail environments, through a
user-following scenario.
The wGO
1
(Fig. 1) is an autonomous and self-
driven shopping cart, designed to follow people with
reduced mobility (elderly, people in wheelchairs,
pregnant women, temporary reduced mobility, etc.)
in commercial environments. With the robot, the user
can control the shopping cart without the need to push
it. This brings numerous advantages and a higher
level of comfort, since the user does not need to worry
about carrying the groceries or pushing the shopping
cart.
Thanks to the sensors (RGBD cameras and LRF),
wGO detects and identifies its user in less than 2 sec-
onds, he just needs to push the “start” button and the
wGO will start following him. Furthermore, distance
sensors, RGBD cameras and LRF allow wGO to iden-
tify and avoid any obstacle along the way.
1
The robot is currently patent pending.
Figure 1: wGO: Front view; Back view.
The idea for the product came from the fact that
between 8% and 10% of the population has some
form of disability (CRPG and ISCTE, 2007), and that
in Europe alone there are about 50 million people with
disabilities and 134 million people with reduced mo-
bility. Apart from people using wheelchairs, there are
other cases in which people are temporarily or per-
manently disabled, these include: an elderly person
using a cane, or someone with a foot or leg injury
who requires the use of crutches, pregnant ladies and
parents with prams.
Neves, A., Campos, D., Duarte, F., Domingues, I., Santos, J., Leão, J., Xavier, J., Matos, L., Camarneiro, M., Penas, M., Miranda, M., Silva, R. and Esteves, T.
Functionalities and Requirements of an Autonomous Shopping Vehicle for People with Reduced Mobility.
DOI: 10.5220/0006385903730380
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 373-380
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
373

In fact, if we add the disabled, the elderly, preg-
nant women, and couples with children, we find that
between 30% to 40% of all Europeans could benefit
from improved accessibility. In addition to those peo-
ple with reduced mobility due to disability or injury,
there are many people without mobility issues who
could benefit from assistance in carrying heavy bags.
Shopping environments are highly heterogeneous
and give rise to a high frequency of dynamic interac-
tions that trigger various senses and emotions in hu-
mans. This often causes a high level of stress in peo-
ple, and those with mobility limitations.
Some of the identified difficulties include (Aus-
tralia, 2016):
• For wheelchair users:
– no adequate forward reach at basins, counters
and tables;
– surfaces that do not provide sufficient traction
(e.g. polished surfaces).
• For people who have trouble walking:
– no seating in waiting areas, at counters and
along lengthy walkways;
– access hazards associated with doors, including
the need to manipulate a handle while using a
walking aid;
– surface finishes that are not slip-resistant or are
unevenly laid.
Besides the difficulties brought by the shop-
ping environment itself, conventional shopping carts,
which can carry many products and which are pro-
vided with wheels so that the shoppers can push them,
also have serious drawbacks. One of them being their
considerable size. This is simultaneously an impor-
tant asset and a significant drawback, as although
shopping carts can hold large and bulky products,
the increased mass complicates manoeuvrability and
handling. Manoeuvrability is particularly compro-
mised when making turns in supermarket aisles or
when avoiding other carts, shelves, and indeed other
shoppers (Rodriguez et al., 2014). Smaller baskets
appeared on the market to overcome the traditional
shopping cart
´
s drawbacks. These baskets were devel-
oped to hold a set of items while at the same time be-
ing easy to move. They contain wheels or rolling el-
ements incorporated into the bases which allow them
to be moved when parallel to the floor or when in-
clined. However, even though these baskets improve
manoeuvrability due to their reduced size and capac-
ity, they also have drawbacks typical of their mor-
phology, such as the need for the user to bend down
for placing or removing items, among others. Fur-
thermore, such baskets can have drawbacks typical of
the way they are stored, since stacking them vertically
can entail a problem for elderly shoppers or shoppers
with any type of physical limitation (Rodriguez et al.,
2014).
While the wGOs software architecture is detailed
in (Neves et al., 2017), here a design point of view
is adopted. The paper starts by reviewing the exist-
ing solutions for people with reduced mobility to shop
(Section 2) and some of the relevant legislation related
with technology equipments (Section 3). Design re-
lated requirements are given in Section 4. Next, in
Section 5 the wGO design evolution and justifications
for the changes made are given. Section 6 identifies
the main risks related with the wGO usage in a real
scenario. Section 7 analyses a user satisfaction study
made in a relevant, unconstrained scenario. Conclu-
sions and another applications of this technology are
given in Section 8 and Section 9, respectively.
2 EXISTING SOLUTIONS
Looking at the commercial market, the most obvious
existing solutions are those provided by shopping cart
producers
2
. These providers typically have products
targeted for customers in wheelchairs, but not prod-
ucts for other types of users with reduced mobility
(e.g. pregnant women). A different type of solution
is the adapted system. Some examples are the “amigo
mobility” scooter
3
and adapted wheelchairs
4
, etc.
These products are, however, not particularly user
friendly. The user needs to first move into the mo-
bility auxiliary device and then to learn how to use it
(which may be particularly hard for the scooter case).
In the case of wheelchair users, the user also needs
to leave their own personal chair, which may cause
discomfort and unnecessary stress. Another problem
with these solutions is that the user is visibly distin-
guishable from the other supermarket clients, which
may discourage some people from using it (Iezzoni
et al., 2001).
While this topic of assisted shopping using
robotics has received very little attention in the aca-
demic research community, several systems exist
where robots are used to help people with reduced
mobility. In (Gurgel Pinheiro et al., 2015), an antici-
pative shared control for robotic wheelchairs, targeted
at people with disabilities is presented. The same
idea, of intelligent wheelchairs, is also the focus of the
2
e.g. wanzl ( www.wanzl.com)
3
www.myamigo.com
4
e.g. meyra (www.meyra.de), promoted by Egiro
(www.egiro.pt)
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
374

work in (Faria et al., 2014a) where a data analysis sys-
tem which provides an adapted command language
is presented. A smart companion robot for elderly
people, capable of carrying out surveillance and tele-
presence tasks, is described in (Pavon-Pulido et al.,
2015). Also, with the aim of helping elderly peo-
ple through tele-presence, a low-cost platform capa-
ble of providing augmented reality for pill dose man-
agement was developed in (Martin Rico et al., 2014).
In (Faria et al., 2014b) an approach based on the Dy-
namical System Approach for obstacle avoidance of
a Smart Walker device to help navigation of elderly
people is presented.
Perhaps the closest application to the focus of this
paper is presented in (Gmez-Goiri et al., 2011) where
a product locator application is proposed. The appli-
cation runs on heterogeneous personal mobile devices
keeping the user private information safe on them,
and it locates the desired products over each super-
market’s map. We believe that such a system could
be complementary to the wGO and could be used in
combination to further improve customers’ shopping
experiences.
3 EXISTING LEGISLATION
In a joint effort started in 1995, the United Na-
tions Economic Commission for Europe (UNECE)
and IFR, engaged in working out a preliminary ser-
vice robot definition and classification scheme, which
has been absorbed by the current ISO Technical Com-
mittee 184/Subcommittee 2 resulting in a novel ISO-
Standard 8373 which became effective in 2012 (for
Standardization, 2 03).
There, a robot is an actuated mechanism pro-
grammable in two or more axes with a degree of au-
tonomy, moving within its environment, to perform
intended tasks. Autonomy in this context means the
ability to perform intended tasks based on current
state and sensing, without human intervention.
A service robot is a robot that performs useful
tasks for humans or equipment excluding industrial
automation application.
A robot system is a system comprising robot(s),
end-effector(s) and any machinery, equipment, de-
vices, or sensors supporting the robot performing its
task (of Robotics, 2017).
Being an autonomous and self-driven shopping
cart, designed to follow people with or without re-
duced mobility in commercial surfaces, wGO follows
under the service robot category. Thanks to the sen-
sors (RGBD cameras and LRF) wGO detects and
identifies its user in less than 2 seconds, he just needs
to push the “start” button and the wGO will start fol-
lowing him. Furthermore, distance sensors, RGBD
cameras and LRF allow wGO to identify and avoid
any obstacle along the way.
The international standard IEC 60950-1 gives the
general requirements for the safety of Information
technology equipments (Commission, 2005). As
stated, it is essential that designers understand the
underlying principles of safety requirements in or-
der that they can engineer safe equipment. Designers
should take into account not only normal operating
conditions but also likely fault conditions, consequen-
tial faults, foreseeable misuse and external influences.
The standard also assumes that users will not in-
tentionally create a hazardous situation. The priorities
depicted in Figure 2 should be observed in determin-
ing what design measures to adopt.
Figure 2: Priorities for design measures to adopt (Commis-
sion, 2005). inp stands for “if not possible”.
The application of a safety standard is intended to
reduce the risk of injury or damage due to: electric
shock, energy related hazards, fire, heat related haz-
ards, mechanical hazards, radiation or chemical haz-
ards.
Here, we are mostly interested in the mechanical
hazards, whose injuries may result from: sharp edges
and corners, moving parts, equipment instability, fly-
ing particles.
Suggestions of measures to reduce risks include:
rounding of sharp edges and corners, guarding, provi-
sion of safety interlocks, providing sufficient stability
to free standing equipment. May also comprise se-
lecting cathode ray tubes and high pressure lamps that
are resistant to implosion and explosion respectively,
and provision of markings to warn users where access
is unavoidable.
Concerning Stability, the standard (Commission,
2005) states that under conditions of normal use, units
and equipment shall not become physically unstable
to the degree that they could become a hazard to
an operator or to a service person. Compliance is
checked by the following tests, where relevant. Each
test is conducted separately. During the tests, con-
Functionalities and Requirements of an Autonomous Shopping Vehicle for People with Reduced Mobility
375
tainers are to hold the amount of substance within
their rated capacity producing the most disadvanta-
geous condition.
• A unit having a mass of 7 kg or more shall not fall
over when tilted to an angle of 10
◦
from its normal
upright position.
• A floor-standing unit having a mass of 25 kg or
more shall not fall over when a force equal to 20%
of the weight of the unit, but not more than 250 N,
is applied in any direction except upwards, at a
height not exceeding 2 m from the floor.
• A floor-standing unit shall not fall over when a
constant downward force of 800 N is applied at
the point of maximum moment to any horizontal
surface of at least 125 mm by at least 200 mm, at
a height up to 1 m from the floor. The 800 N force
is applied by means of a suitable test tool having a
flat surface of approximately 125 mm by 200 mm.
The downward force is applied with the complete
flat surface of the test tool in contact with the
Equipment Under Test (EUT); the test tool need
not be in full contact with uneven surfaces (for
example, corrugated or curved surfaces).
Moreover, materials and components used in the
construction of equipment should be selected and ar-
ranged so that they can be expected to perform in a
reliable manner for the anticipated life of the equip-
ment.
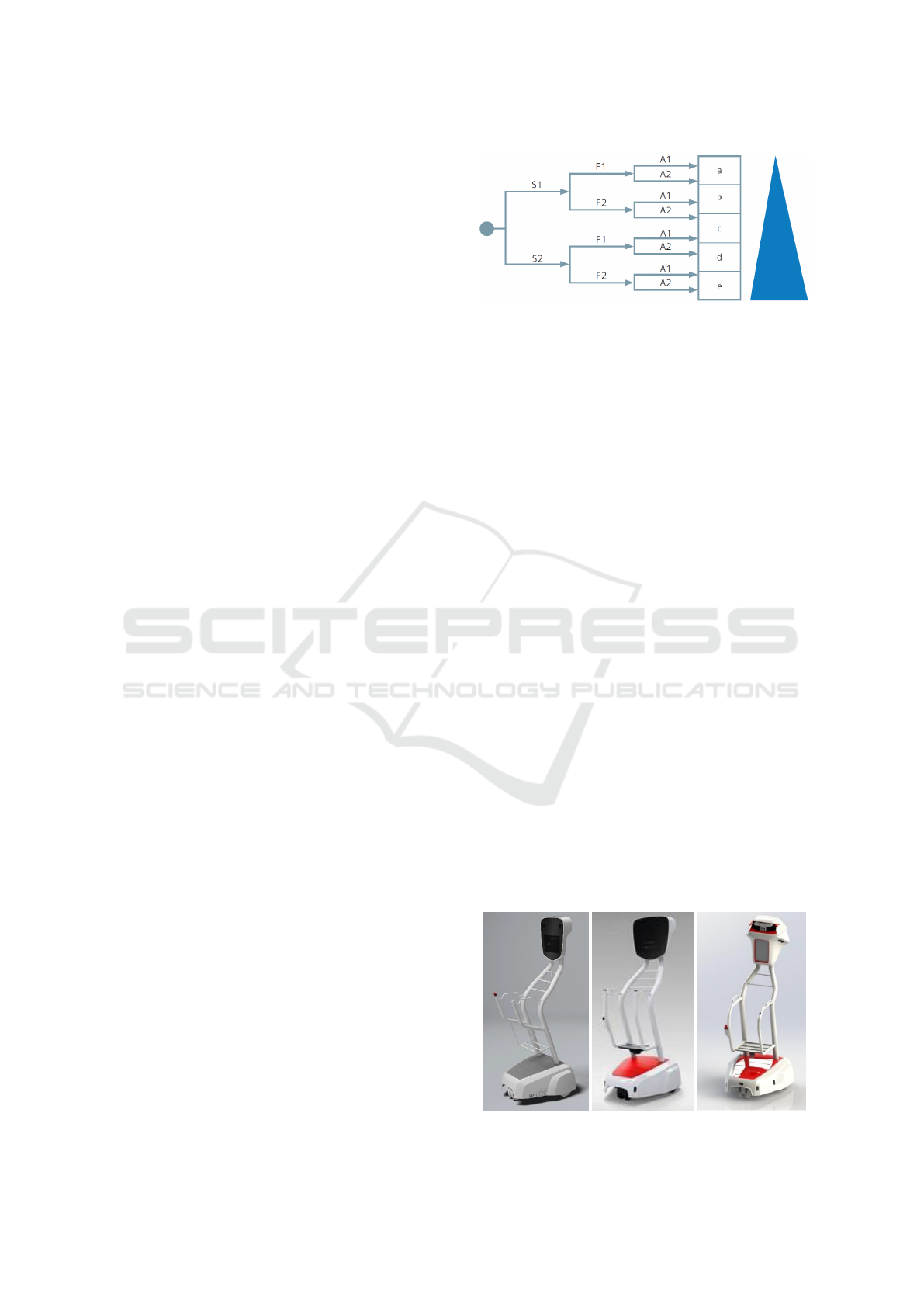
Risk assessment as given in ISO14121-1 (for
Standardization, 2007) is depicted in Fig. 3. The first
level concerns the severity of damage of injury:
• S1: Reversible, e.g. medical treatment or first aid
required
• S2: Irreversible, e.g. loss or breaking of limbs
The second level describes the frequency and/or du-
ration of exposure to hazard:
• F1: 1 day up to 2 weeks; 2 weeks up to 1 year
• F2: Less than 1 hour; 1 hour up to 1 day
The last level is the possibility of avoiding the hazard
• A1: Possible, probable
• A2: Impossible
4 wGO: DESIGN
REQUIREMENTS
Several of the robot desired functionalities and re-
quirements were taken into consideration when de-
signing the wGO. These include:
Figure 3: Risk assessment as per (for Standardization,
2007).
• The robot should not have sharp edges
• The bag should be accessible to every type of user
• Product placement in the bag should be easy
• The robot should be able to carry at least 20 Kg
• The Start/Stop button should be well identified
and accessible
• The Emergency button should be well identified
and accessible
• There should be redundancy in the sensors
• The robot should detect and follow people with
1.3 m height or more
• The robot should be easy to clean
Since not every type of user would be able to reach
a touch screen (e.g. users in wheel chairs), a further
requirement was specified that teh wGOs operation
should not depend on a touch interface.
5 wGO: DESIGN EVOLUTION
The wGO is designed to have an ergonomic shape,
friendly both to the target users (people with reduced
mobility) and the environment (commercial retail en-
vironment).
It has, however, undergone an evolution, as can be
seen in Fig. 4.
Figure 4: wGO evolution.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
376

The design on the left of Fig. 4 was the initial pro-
posal (v0.1). From that version to the next (v0.2) sev-
eral alterations were implemented, namely:
• LRF position was changed: It was noted that the
different height would make visible more of the
obstacles typically present in a commercial site.
Moreover, stability of the support assembly easi-
ness was increased.
• Smaller base: A smaller increases maneuverabil-
ity. It cannot, however, be too small due to stabil-
ity issues which might jeopardize safety.
• Emergency button was repositioned: The emer-
gency button needs to be visible and of easy ac-
cess. It cannot, however, be positioned in a place
where it can be accidentally triggered. A new lo-
cation was found that complies with these require-
ments.
• Changes to the electronic box: Some changes to
the electronic box were performed in order to in-
crease safety. For example, the box was electri-
cally isolated.
• Redesign of the bag holder support: Angular ver-
tices were smoothed in order to make the product
less prone to accidents.
From that version to the next (v0.3) most of the
changes were related to the sensors:
Change of the LRF. Initial tests revealed that the
LRF (RP Lidar) had difficulties in seeing black. A
better LRF was thus chosen to minimize this problem.
Change of the Active Camera. Kinect 2 was found
to be too resource demanding. A different active cam-
era, with lower specification was tested and found to
be enough for our application, at the gain of being less
resources consuming.
Inclusion of a Pan and Tilt System. A pan and tilt
system was included so that the active camera respon-
sible for performing tracking would better follow the
user.
Inclusion of Two Additional Active Cameras.
Two active cameras were added in order to decrease
the dead area and have a better obstacle avoidance
performance.
Changes in the Structure. The middle main struc-
ture was redesigned in order to be thinner (a suffi-
ciently wide diameter to allow the required cables to
pass through it) and less heavy.
Reorganization of the Interior of the Base. The
base was redesigned in order to accommodate two
batteries and thus increase the energetic efficiency of
the robot.
Head Redesign. The inclusion of the additional ac-
tive cameras forced a complete redesign of the head
of the robot in order to accommodate them.
6 wGO: THE RISKS
Safety is a critical characteristic for robots designed
to operate in human environments. Looking back at
the risk assessment as given in ISO14121-1 (for Stan-
dardization, 2007) and depicted in Fig. 3, we observe
that:
• the severity of damage of injury is irreversible
(e.g. breaking of limbs) - S2
• the frequency and duration of exposure to hazard
is in the order of 30 minutes, twice a week (typical
duration and frequency of a shopping experience)
- F1
• it is impossible to avoid the hazard - A2
In this way, wGO is categorized in the d level.
The two main risks associated with the wGO are:
• To turn due to someone hanging on it
• Collision with people
Besides the user manual and the instructions on
how to use the robot properly, several of the design
options had in mind the minimization of the identified
risks.
Changes in the structure included in v0.3 made the
robot less heavy on its top part, giving it a lower centre
of gravity. The addition of one battery, besides the
obvious increase in the robot autonomy, also had the
side effect of adding weight to the base making the
robot even more stable and harder to turn.
Collision avoidance is assured mostly by the use
of redundant sensors (Ponz et al., 2016). Their
existence, type and location has underwent several
changes. The change in the LRF position in v0.2, for
instance, made visible more of the obstacles typically
present in a commercial site. The change in the LRF
itself also allowed the detection of darker obstacles
(people wearing a black suit for instance). The addi-
tion of two active cameras in v0.3 is another example
of redundancy of sensors to detect obstacles.
Finally, there is an emergency button, clearly vis-
ible and positioned in a place with easy access for ev-
ery type of user in case an unpredicted situation hap-
pens. It is important to note that this button has not yet
Functionalities and Requirements of an Autonomous Shopping Vehicle for People with Reduced Mobility
377
been used in any of the internal, external, controlled
or uncontrolled tests.
7 RESULTS
This section summarizes the demonstration of wGO
in a relevant, unconstrained scenario (Figure 5). Two
wGOs were available for the tests and only users with
reduced mobility were asked to participate.
Figure 5: wGO in a relevant scenario.
Transportation of the wGOs from their production
site to the destination where the demonstration (more
than 1800 km) was made by truck with the robots ac-
commodated in disposable plywood boxes.
Concerning the location description, the site had
enough space for circulation, and there were no areas
where the wGO did not fit. Its use was, however, re-
stricted to days where the store was too crowded. The
hypermarket had locations with several different lev-
els of brightness and the main corridor’s ceiling had
big skylights.
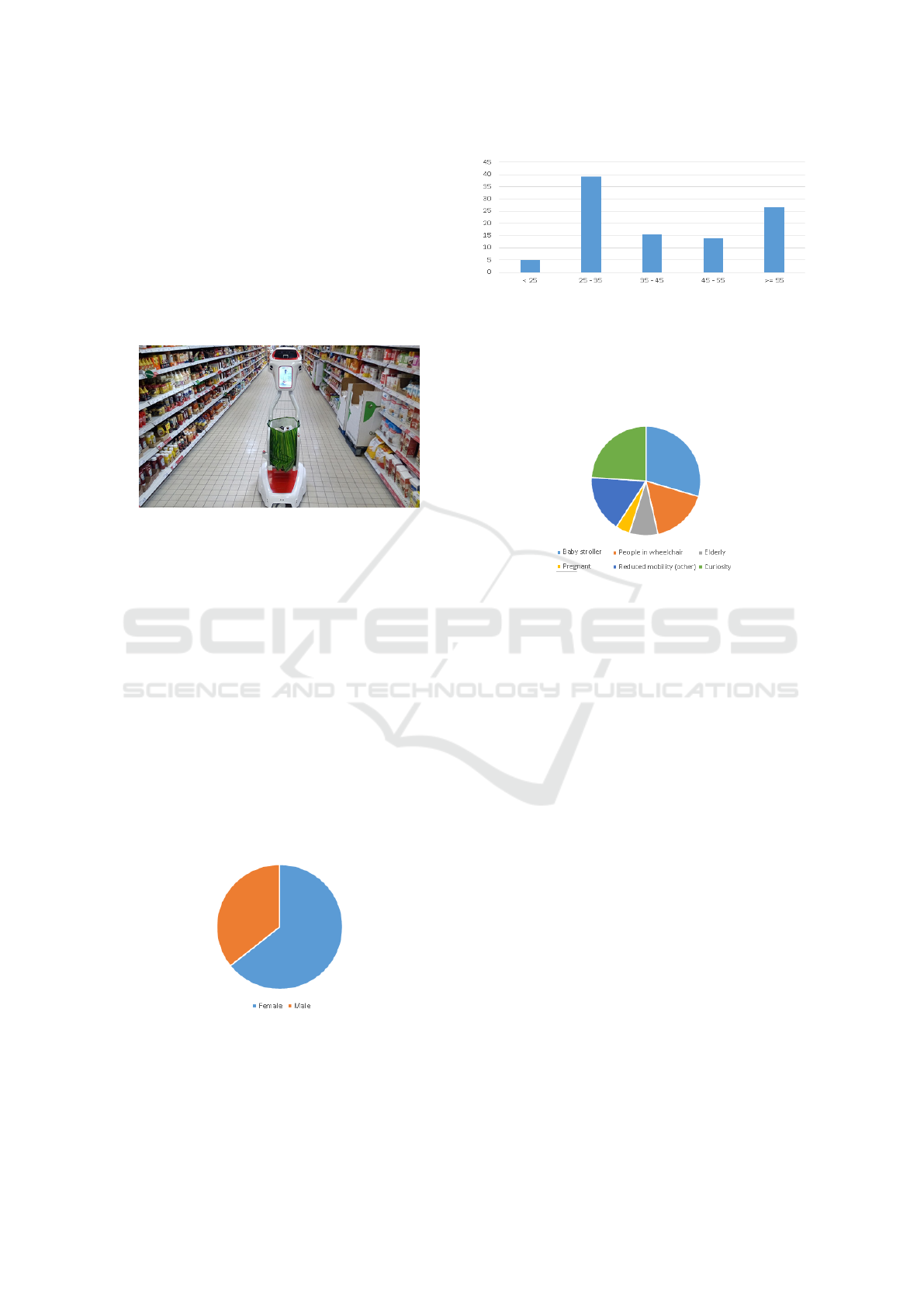
143 clients tested the wGO during two weeks of
demonstration. An average of 14 users a day used
the wGO with the exception, as already mentioned,
of days where the store was too crowded.
An average of 35 minutes was spent per trip, with
most users being female (Fig. 6).
Figure 6: Population gender.
Most of the users had ages between 25 and 36,
with the second most represented class people with
55 or more years (Fig. 7).
Figure 7: Population age.
The categorization of users is shown in Fig. 8. As
can be seen most of the volunteers presented some
type of reduced mobility. Among those, parents with
a baby stroller are the most represented followed by
people in wheelchair and the elderly.
Figure 8: User’s categorization.
A small questionnaire was made to the partici-
pants with the following questions:
• Do you find the wGO more agreeable than the al-
ternatives?
• Would the wGO be a reason for you to come to
this store?
• Would you reuse the wGO?
• Would you recommend the wGO?
• From a scale of 0 to 4 (being 0 not al all and 4
completely), how satisfied are you with the wGO?
Results are presented in Figs 9, 10, 11, and 12, respec-
tively. It can be seen that the vast majority of the users
find wGO better than existing alternatives. More than
64% would find it a reason to return to this particular
store. More than 90% would reuse the wGO and more
than 97% would recommend it. Average satisfaction
was 3.5 out of 4.
7 out of the 143 have returned (within the short pe-
riod of the demonstration) to use the wGO. Of these,
5 were male and 2 female.
Comments from the users included:
Detection and Identification: at times, wGO follows
someone else; the wGO should have the ability to fol-
low the customer in crowded environments; a passive
bracelet or plotter should be provided so that wGO
will follow one person; and the wGO should function
in exterior light.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
378

Figure 9: Do you find wGO
more agreeable than the al-
ternatives?
Figure 10: Would the wGO
be a reason for you to come
to this store?
Figure 11: Would you
reuse the wGO?
Figure 12: Would you rec-
ommend the wGO?
Visibility: to be recognizable by the customer, and
more visible to others (e.g. beacon, light signal); to
show when it is on or off; and increase the volume.
Capacity: larger bag; support for heavy products,
such as water bottles; and hook for personal items
(e.g. handbag).
Usability: to go faster and to shorten the distance be-
tween the wGO and the user.
Movement: more fluidity, especially in narrow pas-
sages and angles and reactivity in crowded environ-
ments.
Usage Restrictions: to go outside and to go to the
car’s trunk.
Other Features: to call a collaborator; to be able to
scan products, know the price and remaining bag ca-
pacity; system for fetching products; speech recogni-
tion (dialogue with wGO); guide the customer in the
store.
8 CONCLUSION
In this paper the wGOs evolution is presented. A high
focus was given to security concerns and its implica-
tion the design of the robot.
A user study made with 143 volunteers was also
analysed.
Several positive aspects were pointed out, such as
the high interest from the customers (some came ex-
pressly to test the wGO); positive general opinion; ex-
istence of loyal customers; technical satisfaction of
87% (versus 73% on previous tests).
There were also, some points to be improved:
• During the process, the wGO should not change
the user
• Difficult to move in crowded environments
• The wGO does not work outside
To attack these problems, several measures will be
taken. Improvements on the identification algorithm
will be made. This will both help with the first and
second points to be improved. When identifying bet-
ter the user, the wGO will not start following a differ-
ent person and will behave better in crowded environ-
ments by, again, always following the same user.
Concerning the exterior lightning, new sensors
that are able to acquire depth information in the ex-
terior will be analysed. At the same time, new algo-
rithms that do not make use of depth information and
only the RGB will be studied.
9 OTHER APPLICATIONS
A great part of Follow Inspiration’s R&D strategy
is based on the wGO technology that can be ap-
plied to several scenarios, including industry, for ma-
terial handling and transportation for the automa-
tive industry. As consequence, a new project were
started in 2015 in order to develop a robot ca-
pable of performing tasks in an autonomous way
through an industrial environment (NORTE-01-0247-
FEDER-011109). New developments have been
made in mapping, localization (Andry Maykol Pinto
and Moreira, 2014), navigation (Costa et al., 2016)
and multi-robot cooperation algorithms (Santos et al.,
2015). The application of autonomous vehicles in
these scenarios has several advantages in the LEAN
process offering flexibility, reducing times and there-
fore the optimization of the operational costs.
Figure 13: wGO Technology applied in an industrial sce-
nario.
Functionalities and Requirements of an Autonomous Shopping Vehicle for People with Reduced Mobility
379

ACKNOWLEDGEMENTS
The authors would like to thank all the institu-
tional supporters, including TIC RISCO, Portugal
Capital Ventures, SGPS, S.A, CEiiA, Fund
˜
ao City
Hall. We would also like to thank to R&D entities
including, Tente, CEiiA, Centimfe and Alma De-
sign. These developments were undertaken under
several EU cofunding programs, namely: QREN
(projects: CENTRO-07-0201-FEDER-023962 and
CENTRO-07-0202-FEDER-024692); Portugal 2020
(projects: PFOCI-01-0247-FEDER006398 and
NORTE-01-0247-FEDER-011109).
REFERENCES
Andry Maykol Pinto, P. G. C. and Moreira, A. P.
(2014). Architecture for visual motion perception of a
surveillance-based autonomous robot. In IEEE Inter-
national Conference on Autonomous Robot Systems
and Competitions (ICARSC).
Australia, G. o. W. (2016). Section five access and inclu-
sion. Disability access and inclusion plan - training
package, Disability Services Comission. Accessed:
2016-11-18.
Commission, I. E. (2005). Part 1: General requirements.
Information technology equipment Safety.
Costa, P., Moreira, N., and Campos, D. (2016). Local-
ization and navigation of an omnidirectional mobile
robot: The robot@factory case study. IEEE Re-
vista Iberoamericana de Tecnologias del Aprendizaje,
pages 1–9.
CRPG and ISCTE (2007). Elementos de caracterizacc
˜
ao
das pessoas com defici
ˆ
encias e incapacidades em
portugal. In Programa Operacional de Assist
ˆ
encia
T
´
ecnica ao QCA III: eixo FSE.
de Matos, L. (2012).
Faria, B., Reis, L., and Lau, N. (2014a). User modeling
and command language adapted for driving an intelli-
gent wheelchair. In IEEE International Conference on
Autonomous Robot Systems and Competitions, pages
158–163.
Faria, V., Silva, J., Martins, M., and Santos, C. (2014b).
Dynamical system approach for obstacle avoidance in
a smart walker device. In IEEE International Con-
ference on Autonomous Robot Systems and Competi-
tions, pages 261–266.
for Standardization, I. O. (2007). Safety of machinery – risk
assessment – part 1: Principles. Standard, ISO.
for Standardization, I. O. (2012-03). Robots and robotic
devices – vocabulary. Standard, ISO.
Gmez-Goiri, A., Castillejo, E., Ordua, P., Laiseca, X., Lpez-
de-Ipia, D., and Fnez, S. (2011). Easing the mobil-
ity of disabled people in supermarkets using a dis-
tributed solution. In Bravo, J., Hervs, R., and Vil-
larreal, V., editors, Ambient Assisted Living, number
6693 in Lecture Notes in Computer Science, pages
41–48. Springer Berlin Heidelberg.
Gurgel Pinheiro, P., Cardozo, E., and Gurgel Pinheiro,
C. (2015). Anticipative shared control for robotic
wheelchairs used by people with disabilities. In IEEE
International Conference on Autonomous Robot Sys-
tems and Competitions, pages 91–96.
Iezzoni, L. I., McCarthy, E. P., Davis, R. B., and Siebens,
H. (2001). Mobility difficulties are not only a prob-
lem of old age. Journal of General Internal Medicine,
16(4):235–243.
Martin Rico, F., Rodriguez Lera, F., and Matellan Olivera,
V. (2014). Myrabot+: A feasible robotic system for
interaction challenges. In IEEE International Con-
ference on Autonomous Robot Systems and Competi-
tions, pages 273–278.
Neves, A., Campos, D., Domingues, I., Santos, J., Leo, J.,
Xavier, J., de Matos, L., Camarneiro, M., Penas, M.,
Miranda, M., Morais, R., Silva, R., and Esteves, T.
(SUBMITTED 2017). A personal robot as an im-
provement to the customers in-store experience. In-
Tech.
of Robotics, I. F. (2017). Definition of service robots.
http://www.ifr.org/service-robots/. Accessed: 2017-
01-23.
Pavon-Pulido, N., Lopez-Riquelme, J., Pinuaga-Cascales,
J., Ferruz-Melero, J., and Morais Dos Santos, R.
(2015). Cybi: A smart companion robot for el-
derly people: Improving teleoperation and telepres-
ence skills by combining cloud computing technolo-
gies and fuzzy logic. In IEEE International Con-
ference on Autonomous Robot Systems and Competi-
tions, pages 198–203.
Ponz, A., Rodrguez-Garavito, C. H., Garca, F., Lenz, P.,
Stiller, C., and Armingol, J. M. (2016). Automatic ob-
stacle classification using laser and camera fusion. In
International Conference on Vehicle Technology and
Intelligent Transport Systems.
Rodriguez, V. J. L., Fernandez, L. M., Hansen, M. M., Mod-
rego, C. E., Peligero, F. J. A., Torijano, J. L., Guallar,
E. E., Cornudella, B. S., and Verdejo, I. G. (2014).
Shopping cart. Justia Patent.
Santos, J., Costa, P., Rocha, L., Moreira, A., and Veiga,
G. (2015). Time enhanced a*: Towards the develop-
ment of a new approach for multi-robot coordination.
IEEE International Conference on Industrial Technol-
ogy (ICIT).
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
380
