
Multi-agent Deep Reinforcement Learning for Task Allocation in
Dynamic Environment
Dhouha Ben Noureddine
1,2
, Atef Gharbi
1
and Samir Ben Ahmed
2
1
LISI, National Institute of Applied Science and Technology, INSAT, University of Carthage, Tunis, Tunisia
2
FST, University of El Manar, Tunis, Tunisia
Keywords:
Task Allocation, Multi-agent System, Deep Reinforcement Learning, Communication, Distributed Environ-
ment.
Abstract:
The task allocation problem in a distributed environment is one of the most challenging problems in a multi-
agent system. We propose a new task allocation process using deep reinforcement learning that allows cooper-
ating agents to act automatically and learn how to communicate with other neighboring agents to allocate tasks
and share resources. Through learning capabilities, agents will be able to reason conveniently, generate an ap-
propriate policy and make a good decision. Our experiments show that it is possible to allocate tasks using
deep Q-learning and more importantly show the performance of our distributed task allocation approach.
1 INTRODUCTION
In an autonomous multi-agent system (MAS), agents
can cooperate and complete hard tasks through task
allocation. So they need to manage tasks unpre-
dictably. To improve the execution performance, dis-
tributed task allocation can make the collaboration
and communication between agents perfect. However
an agent is locally visible only, it is unable to observe
behaviors or get all knowledge about other agents in
the system.
To overcome the task allocation problem en-
countered during system execution, we propose a
new approach, Task Allocation Process using Co-
operative Deep Reinforcement Learning strategy
(TAP CDQL), which combines the advantages of
centralized and distributed learning approaches in lit-
erature. By learning agents can teach each other how
to allocate tasks, so that the task allocation becomes
easier and less complicated. Especially, if agents
share their past task allocation experiences (exploita-
tion) to become a useful knowledge that can be used
for future task allocation process (exploration), it will
be possible to enhance the system efficiency. In our
study, communication is intensively used: when an
agent perceives a task, it follows a protocol of mes-
sages with his neighbors to fulfill this task that may
potentially perform it. In order to allow agents co-
ordinate their behavior together and discover auto-
matically this protocol, we use the Deep Q-Networks
(DQN) which we investigate it to improve the per-
formance and quality of the decentralised allocation
using insights from centralised approaches. So the
role of DQN is to enable groups of agents to learn ef-
fectively coordinated policies in task allocation prob-
lems. In this paper, we propose an algorithm that
shows how to learn to manage and allocate efficiently
resources and tasks. In other words: we ask if agents
can learn to manage resources on their own? And how
many agents interact with each others to allocate tasks
in a distributed environment using learning capabili-
ties?
The contributions of this paper are twofold.
First we propose a Cooperative Deep Reinforcement
Learning approach combining single-agent and multi-
agent learning. Then we propose the distributed task
allocation applying this strategy; which is allowing
agents to request help from cooperating neighbors.
This would be done by allocating tasks to different
learner agents who may be capable each of perform-
ing different subsets of those tasks and exploiting
multiple sources of learned knowledge. By this way,
agents can achieve more efficient and robust tasks
allocation in loosely coupled distributed multi-agent
systems’ environments.
We compare our approach to other task alloca-
tion methods and we demonstrate that with this ap-
proach, agents can learn not only to allocate tasks ef-
ficiently, but also agents will be prepared properly for
new tasks. The remainder of this paper is organized
Noureddine, D., Gharbi, A. and Ahmed, S.
Multi-agent Deep Reinforcement Learning for Task Allocation in Dynamic Environment.
DOI: 10.5220/0006393400170026
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 17-26
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

as follows: we briefly introduce a background on the
reinforcement learning and deep learning in Section
2. This is followed by Section 3 in which detail the
proposed Cooperative Deep Reinforcement Learning
Strategy. Then, a distributed task allocation approach
is illustrated in Section 4. Section 5 discusses our ex-
periments, and some concluding remarks are drawn
and future works mentioned in Section 6.
2 BACKGROUND
In this section we define some fundamental notions
that are essential to understand our work: we begin
with a brief review on Markov decision process MDP
then we introduce the reinforcement learning and fi-
nally we tackle the deep Q-learning.
2.1 Markov Decision Process
A Markov Decision Process MDP is a discrete-time
model for the stochastic evolution of a system’s state,
under control of an external input (the agent’s action
or agents’ joint action). It also models a stochastic re-
ward that depends on the state and action. (Strens and
Windelinckx, 2005)
An MDP is given by 4-tuple < S, A, T, R > where: S
is a set of states; A is a set of actions; T is a stochas-
tic transition function defining the likelihood the next
state will be s
′
∈ S given current state s ∈ S and ac-
tion a ∈ A : P
T
(s
′
|s, a); and R is a stochastic reward
function defining the likelihood the immediate reward
will be r ∈ R given current state s ∈ S and action
a ∈ A : P
R
(r|s, a).
2.2 Reinforcement Learning
The software agents in the Reinforcement Learning
RL (Sutton and Barto, 1998) learn to maximize their
expected future sum of rewards R by interacting with
an environment and learn from sequential experience.
The environment is typically formulated as an MDP.
An RL agent behaves according to a policy π that
specifies a distribution over available actions at each
state.
An RL agent observes the current state s
t
at each dis-
crete time-step t, selects action a
t
according to a pol-
icy π, receives the reward r
t+ 1
thereafter, and transi-
tions according to some probability distribution to a
new state s
t+ 1
. The agent’s objective is to maximize
their expected discounted rewards, R
t
= r
t
+γ∗r
t+ 1
+
γ
2
∗ r
t+ 2
+ ..., where γ ∈ [0, 1] is a discount factor. So
the action-value function is defined as follows:
Q(s, a) = E
π
[R
t
|s
t
= s, a
t
= a] (1)
An agent is learning on-policy if it learns about the
policy that it is currently following. In the off-policy
setting an agent learns from experience of another
agent or another policy, e.g. a previous policy
(Heinrich and Silver, 2016).
Q-learning (Watkins and Dayan, 1992) is a popular
off-policy RL method. It learns about the greedy pol-
icy, which at each state takes the action of the highest
estimated value. Storing and replaying past experi-
ence with off-policy RL from the respective transi-
tions is known as experience replay (Lin, 1992). Fit-
ted Q-Iteration (FQI) (Ernst et al., 2005) is a batch
RL method that replays experience with Q-learning.
Neural Fitted Q-Iteration (NFQ) (Riedmiller, 2005)
and Deep Q-Network (DQN) (Mnih et al., 2015) are
extensions of FQI that use neural network function
approximation with batch and online updates respec-
tively.
However, the main shortcoming of RL in many
applications, is the intractable computation because
of the dimensionality which limit it heavily for real
physical systems. One solution for this dimension-
ality problem is to apply the concept of Deep Q-
Networks.
2.3 Deep Q-Learning
Recently Deep Learning (DL) has became the big
buzz words in artificial intelligence field. The
progress in DL have played a key role in solving a
number of challenging RL dilemmas, including video
games ((Koutnik et al., 2013); (Mnih et al., 2013);
(Mnih et al., 2015)), computer vision ((Krizhevsky
et al., 2012), (Sermanet et al., 2013), (Mnih, 2013)),
high-dimensional robot control ((Levine et al., 2015),
(Assael et al., 2015), (Watter et al., 2015)), speech
recognition ((Dahl et al., 2012), (Graves et al.,
2013)), visual attention (Ba et al., 2015) and the Atari
learning environment (ALE) ((Guo et al., 2014),
(Mnih et al., 2015), (Stadie et al., 2015), (Wang et al.,
2015), (Schaul et al., 2016), (Hasselt et al., 2016),
(Oh et al., 2015), (Bellemare et al., 2016), (Nair et al.,
2015)).
Deep Q-Networks
The basic idea of DQN (Mnih et al., 2015) is to rep-
resent the Q-function by using a neural network pa-
rameterised by θ to represent Q(s, a, θ). DQNs are
optimised by minimising:
L
i
(θ
i
) = E
s,a,r,s′
[(γ
DQN
i
− Q(s, a, θ
i
))
2
] (2)
ICSOFT 2017 - 12th International Conference on Software Technologies
18

At each iteration i, with target y
DQN
i
=
r + γmax
a
′
Q(s
′
, a
′
, θ
−
i
). Here, θ
−
i
are the param-
eters of a target network that is frozen for a number
of iterations while updating the online network
Q(s, a, θ
i
). The action a is chosen from Q(s, a, θ
i
)
by an action selector, which typically implements
an ε-greedy policy that selects the action that max-
imizes the Q-value with a probability of 1 − ε and
chooses randomly with a probability of ε. DQN uses
experience replay (Lin, 1993): during learning, the
agent builds a dataset of episodic experiences and is
then trained by sampling mini-batches of experiences.
Independent Deep Q-Networks
(Tampuu et al., 2015) relies on the work of Deep-
Mind and explores how multiple agents controlled by
autonomous DQN interact when sharing a complex
environment. He defines an extended settings in
which each agent a observes the global s
t
, chooses
an individual action a
a
t
, and receives a team reward,
r
t
, shared among all agents. (Tampuu et al., 2015)
address this settings with a framework that combines
DQN with independent Q-learning, in which each
agent a independently and simultaneously learns its
own Q-function Q
a
(s, a
a
, θ
a
i
). While independent
Q-learning can in principle lead to convergence prob-
lems, it has a strong empirical track record ((Shoham
and Leyton-Brown, 2009), (Zawadzki et al., 2014)),
and was successfully applied to two-player pong.
Deep Recurrent Q-Networks
The last two approaches assume full observability.
Contrary to the environments partially observable, the
input s
t
is hidden and the agent receives only an ob-
servation o
t
that is correlated with s
t
, but in general
does not disambiguate it. (Hausknecht and Stone,
2015), propose the deep recurrent Q-networks to ad-
dress single-agent, partially observable settings. In-
stead of approximating Q(s, a) with a feed-forward
network, they approximate Q(o, a) with a recurrent
neural network that can maintain an internal state and
aggregate observations over time. This can be mod-
elled by adding an extra input h
t− 1
that represents the
hidden state of the network, yielding Q(o
t
, h
t− 1
, a).
For notational simplicity, we omit the dependence of
Q on θ.
3 COOPERATIVE DEEP
REINFORCEMENT LEARNING
STRATEGY
Generally in task allocation approaches, an agent de-
composes a problem into tasks and it has mostly a
task which cannot complete it by itself. It thus sends
a resource announce message to his neighbors which
answer for the announced message if they have the
ability to do such a task and they are idle at that time.
These approaches have no mechanism for reasoning
about future task sequence. It is clear that a precise
estimation for future tasks is impossible. But agents
may have some expectations on the future task se-
quence when they use past experiences. Having such
information about future task sequence is possible if
agents have learning ability which transforms past ex-
periences to a helpful advice. So in a prior knowl-
edge about these tasks, it would be possible to opti-
mize system performance by planning based-learning
the tasks execution which it completed by each agent.
However, such knowledge is not accessible for most
MAS applications.
Based on the hypotheses of partial observabil-
ity, asynchronism related to MAS and all agents are
fully cooperative, a learning-based task allocation
approach is proposed to overcome the problem ex-
plained above. Therefore we combine the central-
ized and distributed learning to solve task alloca-
tion problem. By the proposed method, cooperating
agents learn how to communicate with others agents
to achieve the overall goal of the system. The knowl-
edge obtained in learning process is used to make de-
cision about agent’s task solving ability. The major
difference between single-agent and multi-agent sys-
tems in terms of deep reinforcement learning is that
for a single-agent the environment can be defined as
an MDP. However in multi-agent case, the environ-
ment is no longer stationary because of the unpre-
dictable changes resulting from independent decision
making and agents’ acting mechanisms.
In this section, we define two approaches used
for a Cooperative Deep Q-Learning CDQL strategy
for task allocation where cooperating agents learn to
communicate between themselves before taking ac-
tions. Each agent is controlled by a deep feed-forward
network (Sukhbaatar et al., 2016), which addition-
ally has access to a communication channel carrying a
continuous vector. Through this channel, they receive
the summed transmissions of other agents. However,
what each agent transmits on the channel is not spec-
ified a-priori, learning instead is. Because the com-
munication is continuous, the model can be trained
via back-propagation, and thus can be combined with
Multi-agent Deep Reinforcement Learning for Task Allocation in Dynamic Environment
19

standard single agent RL algorithms.
3.1 Single-agent Learning
In a Single-agent Learning, we use the approach
DRQN (Hausknecht and Stone, 2015) to select ac-
tion taken into account the partial observability. All
the agents aim to maximize the same discounted sum
of rewards R. The basic idea behind our approach
is all agents independently learn parameters and treat
other agents as a part of the environment. In fact ac-
tions can be divided into environment and communi-
cation actions and the Q-values are computed from
these two types of actions. Then agents cooperatively
learn common Q-values by considering joint actions.
So learning process is realized either by each agent by
observing all environmental changes or by communi-
cating with all agents.
We consider the Q-network of an agent a by
Q
a
(o
a
t
, c
a
′
t− 1
, h
a
t− 1
, a
a
), where h
a
t− 1
represent the indi-
vidual hidden of the agent a, o
a
t
the observation ,
c
a
′
t− 1
the messages from other agents during commu-
nication and a
a
the environment action of the agent
a. During decentralized execution (in the next para-
graph), each agent uses its own copy of the learned
network, evolves its own hidden state, chooses its own
actions, and communicates with other agents only
through the communication channel.
3.2 Multi-agent Learning
Multi-agent Learning is the direct application of
Single-agent Learning to multi-agent case. In other
word the distributed deep Q-Learning is the combi-
nation of the centralized one with Q-networks, not
only to share parameters but to push gradients from
one agent to other agents through the communica-
tion channel. By this purpose, each individual agent
learns its own Q-values as a result of its states and ac-
tions which is independent of other agents’ actions.
Otherwise, through this method agents can give each
other feedback about their communication actions to
improve the efficiency of the overall system. Actu-
ally, communication in this study is any kind of mes-
sage between agents, such as an announce messages,
a tasks allocation, a refuse or proposal message, a suc-
cess or failure response of the allocation, information
delivery, etc.
We use then the Communication Neural Net
model (CommNet) (Sukhbaatar et al., 2016) to com-
pute the distribution over tasks and actions at a given
time t. CommNet, is a simple controller for multi-
agent reinforcement learning that is able to learn
continuous communication between a dynamically
changing set of agents. Sukhbaatar defines s
i
the
i
th
agent’s view of the environment state. The in-
put to the controller is the concatenation of all state-
views s = {s
1
, ..., s
I
}, and the controller Φ is a map-
ping a = Φ(s), where the output a is a concatenation
of discrete environment actions a = {a
1
, ..., a
I
} for
each agent and communication actions c = {c
1
, ..., c
I
}.
Note that this single controller Φ encompasses the in-
dividual controllers for each agents, as well as the
communication between agents. The architecture for
Φ that is built from modules f
j
which take the form
of multilayer neural networks. Here j ∈ {0, ..., K},
where K is the number of communication steps in the
network. Each f
j
takes two input vectors for each
agent a
i
: the hidden state h
j
i
and the communica-
tion c
j
i
, and outputs vector h
j+1
i
. The main body of
the model (Sukhbaatar et al., 2016) then takes as in-
put the concatenated vectors h
0
= [h
0
1
, h
0
2
, ..., h
0
I
], and
computes:
h
j+1
i
= f
j
(h
j
i
, c
j
i
) (3)
c
j+1
i
=
1
I − 1
∑
i
′
6=i
h
j+1
i
′
(4)
CommNet (Sukhbaatar et al., 2016) allows communi-
cation between multiple agents and cooperated tasks,
the communication protocol is learned from scratch
simultaneously with agents policies. Before putting
up the reactions, agents have access to a broadcast
channel that can transmit continuous practice between
them. This continuous communication makes the
learning much easier because the communication pro-
tocol can be treated that procreation. Also the archi-
tecture is modularthat allowsthe number of regions to
dynamically change. Thus the (CommNet), (i) takes
the state-view of all agents s, passes it through the en-
coder, (ii) iterates h and c in equations (3) and (4) to
obtain h
K
, (iii) samples actions a for all agents, ac-
cording to a decoder function q(h
K
).
4 TASK ALLOCATION PROCESS
USING CDQL STRATEGY
In this study, we make the simplifying assumption of
full cooperation between agents as mentioned above.
We propose a new approach: Task Allocation Process
using Cooperative Deep Q-learning TAP
CDQL for
task allocation that combine the advantages of cen-
tralized and distributed deep Q-learning approaches.
It is distributed in nature but it aims to remove be-
haviour conflicts of traditional distributed learning ap-
proaches.
ICSOFT 2017 - 12th International Conference on Software Technologies
20

4.1 The Problem Description
Task allocation problem can be simply described as
that an agent has a task which it cannot complete by
itself. We thus formulate the social task allocation
problem in this subsection. We define A a set of
agents: A = {a
1
,..., a
m
}. Agents need resources
to complete tasks. We denote R = {r
1
,..., r
k
} the
collection of the resource types available to A. Each
agent a ∈ A controls a fixed amount of resources
for each resource type in R, which is defined by a
resource function: rsc : A × R → N. Moreover, we
assume agents are connected by a social network.
Definition 1 (Social Network). An agent social net-
work SN = (A, AE) is an undirected graph, where A
is a set of agents and AE is a set of edges connecting
two agents.
We suppose a set of tasks T = {t
1
, t
2
,..., t
n
} arrives at
such an agent social network. Each task t
i
∈ T is then
defined by the tuple {u(t
i
), rsc(t
i
), loc(t
i
)}, where
u(t
i
) is the utility gained if task t
i
is accomplished
(we assume that the utility is identical to the reward
(R
t
=
∑
T
i=1
γ
i
r
t+ i
) that is used in Deep Q-Learning at
each discrete time-step t) and the resource function
rsc : T × R → N specifies the amount of resources
required for the accomplishment of task t
i
. Further-
more, a location function loc : T → A defines the
locations (i.e., agents) at which the tasks arrive in the
social network. An agent a that is the location of a
task t
i
, i.e. loc(t
i
) = a, is called the manager of this
task. Each task t
i
∈ T needs some specific resources
from the agents in order to complete the task. The
exact assignment of tasks to agents is defined by a
task allocation.
Definition 2. Each agent a ∈ A is composed of 5-
tuple {AgentID(a), Neig(a), Resource(a), State(a),
Q
a
(o
a
t
, c
a
′
t− 1
, h
a
t− 1
, a
a
)}, where AgentID(a) is the
identity of agent a, Neig(a) is a set which indicates
the neighbors of agent a, Resource(a) is the resource
which agent a contains, State(a) demonstrates the
state of agent which will be described later, and
Q
a
(o
a
t
, c
a
′
t− 1
, h
a
t− 1
, a
a
) the Q-network of the agent
a, (where h
a
t− 1
represent the individual hidden of
the agent a, o
a
t
the observation, c
a
′
t− 1
the messages
from other agents during communication and a
a
the
environment action of the agent a).
Definition 3 (Task allocation). We consider a set of
tasks T = {t
1
, t
2
,..., t
n
}, a set of agents A = {a
1
,..., a
m
}
in a social network SN, all agents are cooperating
to maximize reward R in the environment to achieve
an overall goal of MAS, and a task allocation is a
mapping φ : T × A × R → N.
4.2 The Principle of Distributed Task
Allocation using CDQL Algorithm
In an open MAS, we define three types of agents: the
agent which requests help for its task is called Man-
ager, the agent which accepts and performs the an-
nounced task is called Participant and the agent that
receives another agent’s commitments for assistance
to find Participants is called Mediator. Initially, no
information is known about any of the agents in the
MAS. Nonetheless, as problems are solved, informa-
tion about agents can be learned using our Coopera-
tive Deep Reinforcement Learning Strategy for task
allocation problem. To guarantee a coherent behav-
ior of the whole distributed system, we define the fol-
lowing idea: we suppose that Neig(a
i
) stores only di-
rectly linked neighboring agents of agent a
i
.
We introduce three states in a complex adaptive
system, i.e. States = (Busy, Committed, Idle), and
an agent can be only in one of the three states at any
time step. When an agent is a Manager or Participant,
the state of that agent is Busy. When an agent is a
Mediator,the agent is in Committed state. An agent in
Idle state is available and not assigned or committed
to any task. For efficient task allocation, it’s supposed
that only an Idle agent can be assigned to a new task
as a Manager or a partial fulfilled task as a Participant,
or Committed to a partial fulfilled task as a Mediator.
A partial fulfilled task is a task, for which a full group
is in formation procedure and has not yet formed.
After a problem is decomposed into tasks and the
Manager sends resource announce message to all its
neighbors, the Idle Participants submit bids on the
tasks each is able to allocate. These proposals al-
low the system to learn each agent’s task solving abil-
ity. At each discrete time-step a task is announced,
a record of each Participant agent’s bid is recorded
for the particular task type. In subsequent task an-
nouncements, the announcement is not broadcast to
all agents but to only a small group Participant learned
agents) that has responded to similar announcements
in earlier problems. When new Participant agents
become active, they receive every type of announce-
ment until their abilities are learned. Through CDQL
each agent’s task solving capability, the system might
eventually switch from task announcement and bid-
ding to task assignment based on agent learning abil-
ity and load. En brief, the task allocation policy is
learned through experience by using our CDQL Strat-
egy. The idea of the algorithm is illustrated as fol-
lows:
• When the Manager agent denoted as A
Mn
should
Multi-agent Deep Reinforcement Learning for Task Allocation in Dynamic Environment
21

apply distributed task allocation (i.e. it doesn’t
have all the required resources), it sends re-
source announce messages, ResAnnounceMess =
<AgentID(A
Mn
), TaskID(t
Mn
), Resource(t
Mn
)>,
to all its neighbors.
• These neighboring agents receiving the ResAn-
nounceMess message sent by A
Mn
,
– If (state (neighboring agent) = Idle) Then the
neighboring agent A
j
proposes with informa-
tion about the types of resources it contains,
the execution time, the utility, the identities of
them and the Q-network namely ProposeMess
= <AgentID(A
j
), Resource(A
j
), Execute(A
j
),
Utility(A
j
), Q-network(A
j
)>.
– Else (state (neighboring agent) = Busy) the A
j
refuses and sends the following message Re-
fuseMess = <AgentID(A
j
)>.
• A
Mn
uses CommNet (Sukhbaatar et al., 2016), (i.e.
it takes the state-view s of all A
Mn
neighboring
agents, passes it through the encoder, iterates h
and c in equations (3) and (4) to obtain h
K
, and
samples actions a for all neighboring agents, ac-
cording to q(h
K
).
– If (A
Mn
identifies the learning state-view s in
accordance with the required resources and if
it’s satisfied with many neighbor’s resource
proposals) Then A
Mn
will select communica-
tion action c using the roulette selection in
accordance with the Q
a
(o
a
t
, c
a
′
t− 1
, h
a
t− 1
, a
a
) for
state s and choose the agent having the high-
est utility (reward), denoted as A
j
, and the state
of A
j
will be changed to Busy. In case the A
Mn
finds several agents having the highest utility
then it chooses the agent A
j
proposing the least
execution time.
– Else A
Mn
is satisfied with only one neighbor’s
resources, then A
Mn
will choose this agent with-
out any utility consideration.
The Manager sends a contract to the cho-
sen agent A
j
composed of 4-tuple, Contract
= <AgentID(A
Mn
), AgentID(A
j
), TaskID(t
Mn
),
Resource(A
Mn
)>.
• After obtaining the response from its different
neighbors, then A
Mn
compares the available re-
sources from its neighbors, i.e. Resoneig(A
Mn
),
with the resources required for its task t
Mn
,
namely Rsc(t
Mn
). (Here, Resoneig(A
Mn
) =
S
A
i
∈Neig(A
Mn
)
Resource(A
i
)). This comparison
would result in one of the following two cases.
– If (Rsc(t
Mn
) ⊆ Resoneig(A)) Then A
Mn
can
form a full group for task t
Mn
directly with its
neighboring agents.
– Else (Resoneig(A) ⊂ Rsc(t
Mn
)) In this condi-
tion, the A
Mn
can only form a partial group for
task t
Mn
. It then commits the task t
Mn
to one
of its neighbors. The commitment selection is
based on the number of neighbors each neigh-
bor of A
Mn
maintaining. The more neighbors
an agent has, the higher probability that agent
could be selected as a Mediator agent to com-
mit the task t
Mn
.
• After selection, A
Mn
commits its partial fulfilled
task t
Mn
to the Mediator agent, denoted as A
Md
.
A commitment consists of 4-tuple, Commitment
= < AgentID(A
Mn
), AgentID(A
Md
), TaskID(t
Mn
),
Rsc(t
Mn
)
1
>, where Rsc(t
Mn
)
1
is a subset of
Rsc(t
Mn
), which contains the unfulfilled required
resources. Afterwards, A
Md
subtracts 1 from N
max
and attempts to discover the agents with available
resources from its neighbors. If any agents satisfy
resource requirement, A
Md
will send a response
message, back to A
Mn
. The A
Mn
then directly
makes contract with the agents which satisfy the
resource requirement. If the neighboring agents
of A
Md
cannot satisfy the resource requirement ei-
ther, A
Md
will commit the partial fulfilled task t
Mn
to one of its neighbors again.
• This process will continue until all of the resource
requirements of task t
Mn
are satisfied, or the N
max
reaches 0, or there is no more Idle agent among
the neighbors. Both of the last two conditions, i.e.
N
max
= 0 and no more Idle agent, demonstrate the
failure of task allocation. In these two conditions,
A
Mn
disables the assigned contracts with the Par-
ticipants, and the states of these Participants are
reset to Idle.
• When finishing an allocation for one task, the
system is restored to its original status and each
agent’s state is reset to Idle.
5 EXPERIMENTS
In order to strengthen the validity and to demonstrate
the quality of our approach, we have simulated our
TAP
CDQL approach in different networks. To test
the efficiency of our algorithm, we compare it with
the Greedy Distributed Allocation Protocol (GDAP)
(Weerdt et al., 2007) and our previous distributed task
allocation algorithm (Gharbi et al., 2017) that it does
not use the CDQL strategy (we called TAP). In this
subsection, we first define GDAP briefly. Then, we
introduce the experiment environment’ settings. At
the end, we depict the results and the relevant analy-
sis.
ICSOFT 2017 - 12th International Conference on Software Technologies
22

5.1 Greedy Distributed Allocation
Protocol (GDAP)
GDAP (Weerdt et al., 2007) is selected to handle task
allocation problem in agent social networks. It’s de-
scribed briefly as follows: All Manager agents a ∈ A
try to find neighboring contractors (the same as Par-
ticipant in this paper) to help them with their tasks
T
a
= {t
i
∈ T|loc(t
i
) = a}. They begin with offering
the most efficient task. Beyond all tasks offered, con-
tractors select the task having the highest efficiency,
and send a bid to the related manager. A bid con-
sists of all the resources the agent is able to supply
for this task. If sufficient resources have been of-
fered, the manager selects the required resources and
informs all contractors of its choice. When a task is
allocated, or when a manager has received offers from
all neighbors but still cannot satisfy its task, the task
is removed from its task list. And this is the main
disadvantage of GDAP that it only relies on neigh-
bors which may cause several tasks unallocated due
to limited resources, while our approach tries to solve
this problem.
5.2 Experimental Settings
We have implemented TAP
CDQL, TAP and GDAP
in JAVA and we have tested them. We have repeated
the same experiment determinate in (Weerdt et al.,
2007) to deliver the performance of our approach.
There are two different settings used in our exper-
iment. The first setup has done in the Small-world
networks in which most neighbors of an agent are
also connected to each other. The second setup has
done in the Scale free networks. And the results are
compared with the results when there is no learning.
Setting 1: we consider the number of agents is 40,
the number of tasks is 20, the number of different
resource’s types is 5, the average number of resources
required by each task is 30 and the average number
of resources needed by each tasks is 30. We assume
that tasks are distributed uniformly on each Idle agent
and resources are allocated uniformly to agents. The
only changeable variable in this setting is the average
number of neighbors. This setting is destined for
representing the influence of neighbors’ number on
the performance of TAP CDQL, TAP and GDAP.
Setting 2: we fix the average number of neighbors
at 10. We consider the number of agents increases
and varies from 100 to 2000. We fix the ratio be-
tween the number of agents and tasks at 5/3 and the
resource ratio at 1.2. The number of different resource
types is 20 and the average resource requirement of
a tasks is 100. The tasks are uniformly distributed.
This setting is defined to demonstrate the scalability
of TAP
CDQL, TAP and GDAP in a large scale net-
works with a fixed average number of neighbors.
The algorithms have been evaluated according to two
criteria in this experiment, which are the Utility Ra-
tio (the ratio between the summation of the success-
fully completed (allocated) tasks and the total number
of tasks as described in Subsection 4.1. If the Utility
Ratio is higher, that means more tasks can be allo-
cated, so the performance is better.) and the Execu-
tion Time (is the performing time of the algorithms in
each network under different situations respectively.).
The unit of execution time is millisecond. For sim-
plicity, we suppose that once a task has been allo-
cated to a Participant, the Participant would success-
fully finish this task and without failure.
5.3 Experiment Results and Analysis
Experiment results and analysis from setting 1: we
would like to test in this experiment the influence
of different average number of neighbors on algo-
rithms and the learning impact on allocating tasks per-
formance. We remark in Figure 1 the Utility Ratio
of TAP
CDQL in different networks is more reliable
than of TAP and GDAP algorithms. In the one hand,
for the reason that the distribution of tasks in GDAP
is only depending on the Manager neighbors, contrary
to ours and TAP in the case of need at other agents are
allocated (i.e. not only the neighbors). On the other
hand, cooperating agents in TAP
CDQL are likely to
select neighboring agents though our CDQL strategy.
Figure 1: The Utility ratio of TAP CDQL, TAP and GDAP
depend on the average number of neighbors in different type
of networks.
Multi-agent Deep Reinforcement Learning for Task Allocation in Dynamic Environment
23
We can mention another factor to compare
approaches which is the network type. The results
of GDAP in a small world network is higher than
in a scale free network, and this is because the
most agents have a very few neighbors in the small
network. In opposite, in the scale free network when
the average number of neighbors increases the GDAP
performance decreases. Therefore, this factor does
not affect the performance of our both algorithm
TAP CDQL and TAP as we take into consideration
enough neighbors to obtain satisfactory resources
for processing its tasks without reallocating tasks
farther and during learning the agents improve the
information delivery process.
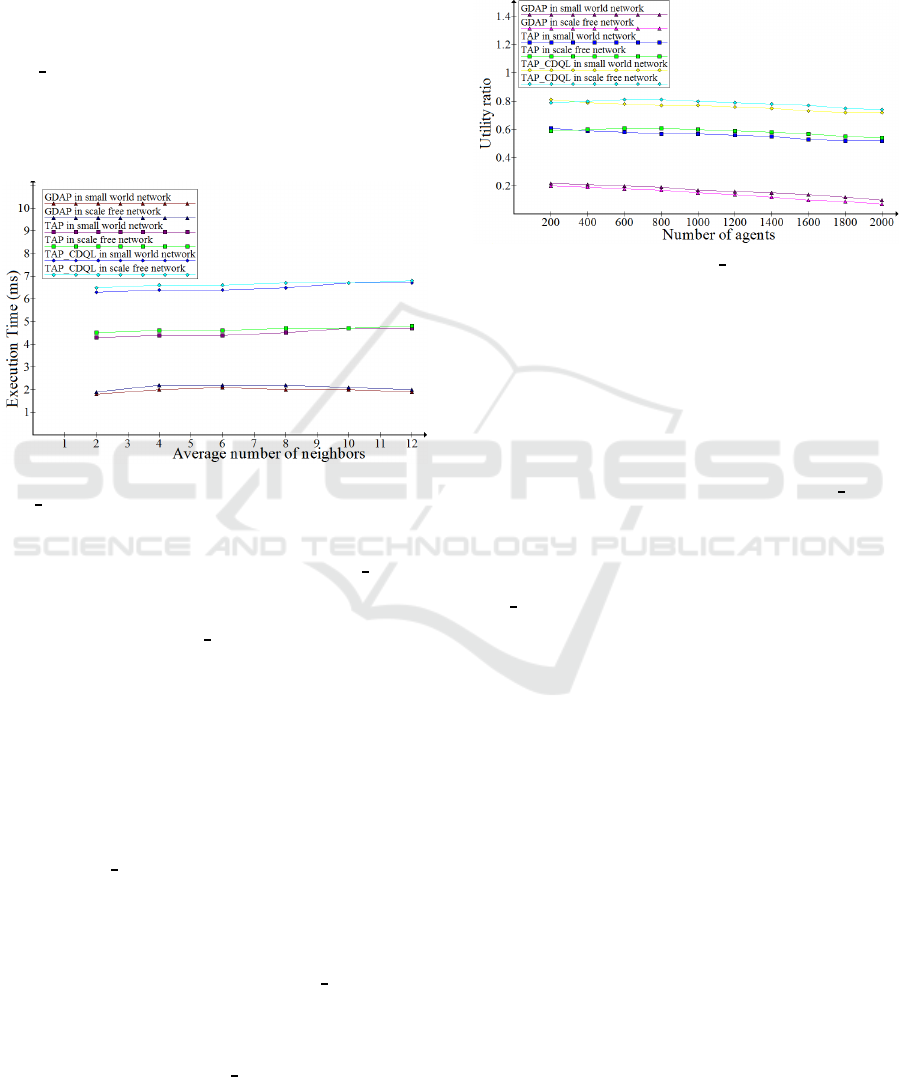
Figure 2: The Execution time in millisecond of the
TAP
CDQL, TAP and GDAP depend on the average num-
ber of neighbors in different type of networks.
Figure 2 presents the Execution Time of TAP
CDQL,
TAP and GDAP algorithms in different networks
depend on the average number of neighbors. The
Execution Time of TAP
CDQL and TAP is higher
than that of GDAP since during execution the agents
in our algorithms reallocate tasks when resources
from neighbors are unsatisfying. Furthermore, we
note that the results of GDAP in a small world
network is higher than in a scale free network, but
compared to our algorithms are still lower and this
is because it considers only neighbors which could
decrease the time and communication cost during
task allocation process. Moreover, the Execution
Time of TAP
CDQL is higher than that of TAP and
this is due to the announce message is not broadcast
to all agents but to only the learned agents.
Experiment results and analysis from setting 2: we
would like to test the scalability of TAP
CDQL, TAP
and GDAP in different large network scales like appli-
cations running on the internet. The Figure 3 presents
the Utility Ratio of GDAP which is constantly de-
scending while that our TAP
CDQL, TAP algorithms
can save the stability and it’s higher than GDAP with
the increasing of number of agents and learned agents,
the communication between them based on the learn-
ing and simultaneously the number of tasks in a large
network scale. In fact, we can argue this case by the
rising proportionally of the network scale, the tasks
and the resource types.
Figure 3: The Utility ratio of TAP CDQL, TAP and GDAP
depend on the number of agents in different type of net-
works.
Moreover the condition in small world network is bet-
ter than that in scale free network. And this is justi-
fied by the same reason described above that in scale
free network, several agents only have a few neigh-
bors which is not good for GDAP. Compared with
GDAP, our algorithms is more competitive and it is
benefited from task reallocation but the TAP
CDQL
is much better than TAP in term of the overall goal
achievement and this is by learning which tasks each
agent can allocate, task allocation becomes simpler.
Figure 4 presents the Execution Time of
TAP
CDQL, TAP and GDAP in different network
types. GDAP spends less time when there are more
agents in the network. This is because there are
more tasks despite the average number of neighbors
is fixed. Accordingly, more reallocation steps cannot
be avoided towards allocating these tasks, that leads
to soaring in time and communication overhead. Fur-
thermore, the graphs show that the GDAP and our
approaches almost behave linearly and the time con-
sumption of GDAP keeps a lower level than ours.
This can be supposedly interpreted that GDAP only
relies on neighboring agents.
6 CONCLUSION
In this paper, we propose a task allocation approach
using cooperative Deep Q-Learning improving the
system performance by means of past task allocation
experiences. An important originality of our work is
the use of neural network learning and reinforcement
learning, to which a great attention is payed in this
ICSOFT 2017 - 12th International Conference on Software Technologies
24
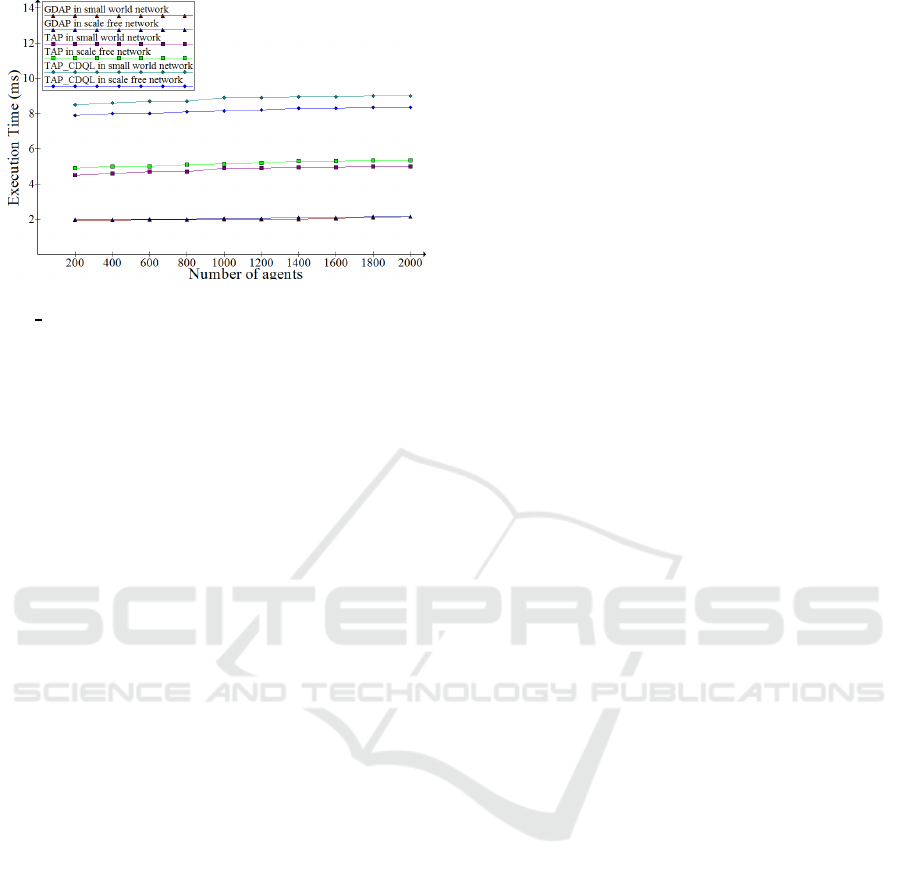
Figure 4: The Execution time in millisecond of the
TAP
CDQL, TAP and GDAP depend on the number of
agents in different type of networks.
paper. Our approach combines a single agent learn-
ing with CommNet which improves the communica-
tion and social cooperation between agents, and con-
sequently the agents’ group performance. It also in-
cludes the increasing of communication knowledge
between agents. This method performs the task allo-
cation policy which enhance the efficiency of the sys-
tem. We experimentally show that our approach can
handle the task allocation problem. Although our ap-
proach overcomes some dilemmas, one of the aspects
that we did not fully exploit is its ability to handle het-
erogeneous agent types. Furthermore, due to decen-
tralization and reallocation features, it still has several
deficiencies. All these problems will be faced in near
future work, that will focus on assessing the mecha-
nism’s ability to deal with larger state action spaces
than the one exemplified in this paper and review the
performance benefits compared to the heavier-weight
alternative solutions.
REFERENCES
Assael, J., Wahlstrom, N., Schon, T., and Deisenroth,
M. (2015). Data-efficient learning of feedback poli-
cies from image pixels using deep dynamical models.
arXiv preprint arXiv:1510.02173.
Ba, J., Mnih, V., and Kavukcuoglu, K. (2015). Multiple
object recognition with visual attention. In Proc. of
3rd International Conference on Learning Represen-
tations (ICLR2015).
Bellemare, M., Ostrovski, G., A., A. G., Thomas, P. S., and
Munos, R. (2016). Increasing the action gap: New op-
erators for reinforcement learning. In Proc. of Thirti-
eth AAAI Conference on Artificial Intelligence (AAAI-
16).
Dahl, G. E., Yu, D., Deng, L., and Acero, A. (2012).
Context-dependent pre-trained deep neural networks
for large-vocabulary speech recognition. IEEE Trans-
actions on Audio, Speech, and Language Processing,
20(1):30–42.
Ernst, D., Geurts, P., and Wehenkel, L. (2005). Tree-based
batch mode reinforcement learning. Journal of Ma-
chine Learning Research, pages 503–556.
Gharbi, A., Noureddine, D. B., and Ahmed, S. B. (2017). A
social multi-agent cooperation system based on plan-
ning and distributed task allocation: Real case study.
In under review in Proc.of the 12th International Con-
ference on Evaluation of Novel Approaches to Soft-
ware Engineering (ENASE’17), Porto, Portugal.
Graves, A., Mohamed, A. R., and Hinton, G. E. (2013).
Speech recognition with deep recurrent neural net-
works. In Proc. of IEEE International Conference on
Acoustics, Speech and Signal Processing (ICASSP),
pages 6645–6649.
Guo, X., Singh, S., Lee, H., Lewis, R., and Wang, X.
(2014). Deep learning for real-time atari game play
using offline monte-carlo tree search planning. In
Proc. of 27th Advances in Neural Information Pro-
cessing Systems (NIPS 2014), pages 3338–3346.
Hasselt, H. V., Guez, A., and Silver, D. (2016). Deep re-
inforcement learning with double q-learning. In Proc.
of Thirtieth AAAI Conference on Artificial Intelligence
(AAAI-16).
Hausknecht, M. and Stone, P. (2015). Deep recurrent q-
learning for partially observable mdps. arXiv preprint
arXiv:1507.06527.
Heinrich, J. and Silver, D. (2016). Deep reinforce-
ment learning from self-play in imperfect-information
games. arXiv preprint arXiv:1603.01121.
Koutnik, J., Cuccu, G., Schmidhuber, J., and Gomez, F.
(2013). Evolving large-scale neural networks for
vision-based reinforcement learning. In Proc. of 15th
annual conference on Genetic and evolutionary com-
putation, ACM, pages 1061–1068.
Krizhevsky, A., Sutskever, I., and Hinton, G. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in Neural Information Process-
ing Systems, 25:1106–1114.
Levine, S., Finn, C., Darrell, T., and Abbeel, P. (2015). End-
to-end training of deep visuomotor policies. arXiv
preprint arXiv:1504-00702.
Lin, L. (1992). Self-improving reactive agents based on re-
inforcement learning, planning and teaching. Machine
learning, 8(3-4):293–321.
Lin, L. (1993). Reinforcement Learning for Robots Using
Neural Networks. PhD thesis, Carnegie Mellon Uni-
versity, Pittsburgh.
Mnih, V. (2013). Machine Learning for Aerial Image La-
beling, PhD thesis. PhD thesis, University of Toronto.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312-5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., Riedmiller, M., Ried-
miller, M., Fidjeland, A. K., Ostrovski, G., Petersen,
S., Beattie, C., Sadik, A., Antonoglou, I., King, H.,
Kumaran, D., Wierstra, D., Legg, S., , and Hassabis,
Multi-agent Deep Reinforcement Learning for Task Allocation in Dynamic Environment
25

D. (2015). Human-level control through deep rein-
forcement learning. Nature, 518(7540):529–533.
Nair, A., Srinivasan, P., Blackwell, S., Alcicek, C., Fearon,
R., Maria, A., Panneershelvam, V. D., Suleyman,
M., Beattie, C., Petersen, S., Legg, S., Mnih, V.,
Kavukcuoglu, K., and Silver, D. (2015). Massively
parallel methods for deep reinforcement learning. In
Proc. of Deep Learning Workshop, ICML.
Oh, J., Guo, X., Lee, H., Lewis, R., and Singh, S. (2015).
Action-conditional video prediction using deep net-
works in atari games. In Proc. of 28th Advances in
Neural Information Processing Systems (NIPS 2015),
pages 2845–2853.
Riedmiller, M. (2005). Neural fitted q iterationfirst ex-
periences with a data efficient neural reinforcement
learning method. In Machine Learning: ECML 2005,
Springer, pages 317–328.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D. (2016).
Prioritized experience replay. In Proc. of 5th In-
ternational Conference on Learning Representations
(ICLR).
Sermanet, P., Kavukcuoglu, K., Chintala, S., and LeCun, Y.
(2013). Pedestrian detection with unsupervised multi-
stage feature learning. In Proc. of 26th International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR 2013), IEEE, pages 3626–3633.
Shoham, Y. and Leyton-Brown, K. (2009). Multiagent sys-
tems: Algorithmic, game-theoretic, and logical foun-
dations. Cambridge University Press, New York.
Stadie, B., Levine, S., and Abbeel, P. (2015). Incentivizing
exploration in reinforcement learning with deep pre-
dictive models. arXiv preprint arXiv:1507.00814.
Strens, M. and Windelinckx, N. (2005). Combining plan-
ning with reinforcement learning for multi-robot task
allocation. Adaptive Agents and Multi-Agent Systems
II, 3394:260–274.
Sukhbaatar, S., Szlam, A., and Fergus, R. (2016). Learn-
ing multiagent communication with backpropagation.
In 29th Conference on Neural Information Processing
Systems (NIPS 2016), Barcelona, Spain.
Sutton, R. and Barto, A. (1998). Introduction to reinforce-
ment learning. MIT Press Cambridge.
Tampuu, A., Matiisen, T., Kodelja, D., Kuzovkin, I., Korjus,
K., Aru, J., Aru, J., and Vicente, R.(2015). Multiagent
cooperation and competition with deep reinforcement
learning. arXiv preprint arXiv:1511.08779.
Wang, Z., de Freitas, N., and Lanctot, M. (2015). Dueling
network architectures for deep reinforcement learn-
ing. arXiv preprint arXiv:1511.06581.
Watkins, C. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4):279–292.
Watter, M., Springenberg, J. T., Boedecker, J., and
M.A.Riedmiller (2015). Embed to control: A locally
linear latent dynamics model for control from raw im-
ages. In Proc. of 28th Advances in Neural Information
Processing Systems (NIPS 2015).
Weerdt, M., Zhang, Y., and Klos, T. (2007). Distributed
task allocation in social networks. In The Proceedings
of 6th Autonomous Agents and Multi-agent Systems
(AAMAS 2007), Honolulu, Hawaii, USA, pages 500–
507.
Zawadzki, E., Lipson, A., and Leyton-Brown, K. (2014).
Empirically evaluating multiagent learning algo-
rithms. arXiv preprint arXiv:1401.8074.
ICSOFT 2017 - 12th International Conference on Software Technologies
26
