
Non-singular Terminal Second Order Sliding Mode with Time Delay
Estimation for Uncertain Robot Manipulators
Yassine Kali
1
, Maarouf Saad
2
and Khalid Benjelloun
1
1
Department of Electrical Engineering, Ecole Mohammadia d’Ing
´
enieurs, Mohammed V University, Rabat, Morocco
2
Department of Electrical Engineering, Ecole de Technologie Sup
´
erieure, Montreal, QC H3C 1K3, Canada
Keywords:
Second Order Sliding Mode, Time Delay Estimation, Non-singular Terminal Sliding Surface, Lyapunov,
Uncertain Robot.
Abstract:
In this paper, a second order sliding mode with time delay estimation based on non-singular terminal sliding
surface is presented for high-accuracy tracking trajectory of uncertain robot manipulators. The design of the
proposed controller is based on a non-singular terminal sliding surface that overcomes the problem of singu-
larity and the restrictions of the exponent in classical terminal sliding surface. Then, a second order sliding
mode control scheme with time delay estimation is proposed to eliminate the chattering phenomenon and to
estimate the uncertainties and disturbances. Lyapunov theory is used to prove the finite-time convergence of
the sliding surface and its derivative. Finally, simulation results are presented to illustrate the effectiveness of
the proposed method.
1 INTRODUCTION
Nowadays, robot manipulators become increasingly
used in different industrial applications. For this rea-
son, many research has been proposed for control of
robot systems. The main control objective of robotic
system is to ensure high accuracy tracking trajec-
tory. However, robot manipulators suffer from vari-
ous model uncertainties (Craig, 1989), caused by fric-
tion, unmodeled dynamics, disturbances, and payload
parameters. In literature, many control algorithms
have been developed for uncertain robotic manipula-
tors, including adaptive control (Seraji, 1987), intelli-
gent controller such as fuzzy control (Yi and Chung,
1997; Guo and Woo, 2003) and neural network (Hsia
and Jung, 1995), backstepping (Slotine and Li, 1991;
Khalil, 1992), Sliding Mode Control (SMC) (Utkin,
1992; Utkin et al., 1999).
Sliding mode control, due to its robustness with
respect to uncertainties and to the simplicity of con-
trol law design, has received a wide attention from
the research community. The basic idea of SMC de-
sign is to select a user chosen sliding surface and to
then design a control law that forces the system’s tra-
jectory to reach and remain on the sliding surface.
However, SMC has many drawbacks, the major one
is the chattering phenomenon which comes from high
frequency switching of the control signal input (Frid-
man, 2001; Boiko and Fridman, 2005).
To solve this problem, numerous works have
been proposed. The first proposition was to replace
the signum function by a smooth continuous func-
tion (Slotine and Li, 1991). However, this proposition
affects robustness and accuracy. Another approach
is to use the observer-based sliding mode (Liu and
Wang, 2012; Cao and Chen, 2014) where the goal
is to provide exact and robust estimation in order to
allow chattering reduction by a small choice of the
switching gain matrix. However, the control perfor-
mance can be reduced if the estimation is not accu-
rate.
In (Levant, 1993; Fridman and Levant, 2002; Sht-
essel et al., 2014), a Higher Order Sliding Mode
(HOSM) control has been proposed which provides
less chattering and better precision compared to clas-
sical SMC. HOSM operates on the higher order
derivative of the sliding surface unlike the conven-
tional SMC that acts on the first derivative. Here, the
switching action appears in the higher derivatives of
the control and the control signal becomes continu-
ous. Therefore, the chattering phenomenon is atten-
uated. However, this technique doesn’t compensate
uncertainties growing in time or with the state vari-
ables.
Motivated to deal with all these problems, this
work will propose a robust controller for uncertain
226
Kali, Y., Saad, M. and Benjelloun, K.
Non-singular Terminal Second Order Sliding Mode with Time Delay Estimation for Uncertain Robot Manipulators.
DOI: 10.5220/0006394902260232
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 226-232
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

robotic manipulators. The proposed controller in this
paper is a combination of a new non-singular ter-
minal second order sliding mode and Time Delay
Estimation (TDE). Although, TDE has a very sim-
ple structure, its effectiveness to robotic manipula-
tors has been demonstrated through many applica-
tions (Youcef-Toumi and Ito, 1990; Hsia and Gao,
1990; Kali et al., 2015). TDE provides an estima-
tion of uncertainties by observing the inputs and the
states of the robot one step into the past while the new
non-singular terminal second order sliding mode will
be used to ensure fast transient response, finite-time
convergence of the sliding surface and its derivative
to zero and to reduce chattering.
The rest of the paper is arranged as follows. Sec-
tion 2 introduces the dynamic equation of n-link robot
manipulators and the control objective. In Section 3,
the proposed non-singular terminal second order slid-
ing mode and time delay estimation is designed and
the stability analysis using Lyapunov theory is estab-
lished. In Section 4, simulation results for 3-DOF
ANAT robot arm are provided to prove the effective-
ness of the proposed controller. Finally, the conclu-
sion is drawn in section 5.
2 PRELIMINARY
2.1 Robot Dynamics
Consider the dynamics of n-DOF robot manipulator
in the following matrix equation (Craig, 1989):
M(q) ¨q +C(q, ˙q) ˙q + G(q) = τ +τ
d
(1)
where q, ˙q, ¨q ∈ R
n
are the joint position, velocity and
acceleration vectors, respectively, M(q) ∈ R
n×n
is the
inertia matrix, C(q, ˙q) ∈ R
n×n
is the centrifugal and
Coriolis matrix, G(q) ∈ R
n
is the gravitational vector,
τ
d
,τ ∈ R
n
denotes the disturbance and torque input
vectors, respectively.
Introducing a constant diagonal matrix M =
diag(m
11
,·· · , m
nn
), the dynamic equation of the
robot manipulator given in partitioned form in equa-
tion (1) can be rewritten as follows:
M ¨q + H(q, ˙q, ¨q) = τ (2)
where:
H(q, ˙q, ¨q) = (M(q) − M) ¨q +C(q, ˙q) ˙q + G(q) − τ
d
(3)
For simplicity, let us denote H(t) := H(q, ˙q, ¨q) .
2.2 Problem Formulation
The control objective is to design a robust controller
to guarantee the finite-time convergence of the track-
ing error and its derivative to zero in presence of un-
certainties and external disturbances. To that end, the
controller will be designed and its stability analysis
carried out based on the following properties and as-
sumptions:
• Property 1: The inertia matrix M(q) in equa-
tion (1) is positive-definite symmetrical and
bounded such that:
0 < m
1
≤ kM(q)k ≤ m
2
< ∞
where m
1
and m
2
are two known positive con-
stants (Craig, 1989).
• Property 2: At time t = 0s, the joint acceleration
is 0 rad/s
2
which means τ(0) = H(0).
• Assumption 1: The joint position and velocity
states are measurable.
• Assumption 2: The joint velocity and accelera-
tion states are bounded.
• Assumption 3: the time derivative
˙
H
i
(t) of the
functions H
i
(t) for i = 1,·· · ,n of the vector
H(t) = [H
1
(t),· ·· ,H
n
(t)]
T
are continuously dif-
ferentiable with respect to the time variable and
don’t vary largely during a small L period of
time (Youcef-Toumi and Ito, 1990).
3 CONTROLLER DESIGN
In this section, a new non-singular terminal second
order sliding mode with time delay estimation will be
designed to force the states to move along the slid-
ing manifold. Figure 1 shows the architecture of the
closed-loop system.
Figure 1: Block diagram of the closed-loop system.
3.1 Non-singular Terminal Sliding
Surface
Let q
d
∈ R
n
be the desired position trajectory and
ε = q − q
d
be the tracking error. Then, the proposed
Non-singular Terminal Second Order Sliding Mode with Time Delay Estimation for Uncertain Robot Manipulators
227

NTSM surface in (Tran and Kang, 2015) is given by:
σ =
˙
ε + λ
1
ε + λ
2
e
−βt
(ε
T
ε)
−α
ε (4)
where λ
1
= diag(λ
1i
) and λ
2
= diag(λ
2i
) for i =
1,·· · , n are diagonal positive matrices, 0 < α < 1 and
β > 0. In (4), the term e
−βt
will decrease to zero when
t → ∞ and the proposed non-singular terminal sliding
surface will become linear. By choosing a suitable β,
the proposed surface will combine between the classi-
cal non-singular terminal sliding surface and the clas-
sical linear one.
Figure 2: Proposed non-singular terminal sliding surface in
phase plane.
Then, using equation (2), the time derivative of σ
is as follows:
3.2 Second Order Sliding Mode with
TDE
The sliding set of order r − th associated to manifold
is defined in (Levant, 1993) by:
σ =
˙
σ =
¨
σ = · ·· = σ
(r−1)
= 0 (5)
Notice that the above equation represents an
r−dimensional condition on the system dynamics (r
denotes the relative degree of the system). For sec-
ond order dynamic system which is the case of our
system, r = 2. Then, the first time derivative of σ is:
˙
σ =
¨
ε + λ
1
˙
ε + λ
2
E
= ¨q − ¨q
d
+ λ
1
˙
ε + λ
2
E
= M
−1
[τ − H(t)] − ¨q
d
+ λ
1
˙
ε + λ
2
E (6)
where E is given by:
E = −βe
−βt
(ε
T
ε)
−α
ε + e
−βt
(ε
T
ε)
−α
˙
ε
−2αe
−βt
(ε
T
ε)
−α−1
(ε
T
˙
ε)ε (7)
Now, lets define the new system formed by η
1
= σ
and η
2
=
˙
σ, then:
˙
η
1
=
˙
σ
˙
η
2
= M
−1
˙
τ −
˙
H(t)
− q
(3)
d
+ λ
1
¨
ε + λ
2
˙
E
(8)
In Eq. (8), the time derivative
˙
τ would be designed to
act on the second order derivative of the sliding sur-
face. Here, the time derivative,
˙
τ would be designed
as a discontinuous signal, but its integral τ, would be
continuous by eliminating the high frequency chatter-
ing.
To determine a second order sliding mode, a new
surface is defined for the system given in Eq. (8) as:
S = η
2
+ λ
3
η
1
(9)
where λ
3
= diag(λ
3i
) is a diagonal positive matrix
and S satisfies:
˙
S = −Ksign(S) (10)
where K = diag(K
1
,K
2
,·· · , K
n
) denotes the posi-
tive diagonal switching gain matrix and sign(S) =
[sign(S
1
),sign(S
2
),·· · , sign(S
n
)]
T
with:
sign(S
i
) =
1, i f S
i
> 0
0, i f S
i
= 0
−1, i f S
i
< 0
(11)
Resolving Eq. (10) by using Eq. (8), the time deriva-
tive
˙
τ(t) is obtained as:
˙
τ(t) =
˙
H(t) + Mu(t) (12)
where:
u(t) = q
(3)
d
− λ
1
¨
ε − λ
2
˙
E − λ
3
˙
σ − Ksign(S) (13)
Then, by integrating both sides of the above equa-
tion between 0 and t and using Property 2 given in
Section 2, the new non-singular terminal second or-
der sliding mode is obtained as:
τ(t) = H(t) + M
Z
t
0
u(t)dt (14)
Since H(t) has uncertain part, the control perfor-
mance will be affected. Then, based on Assump-
tion 3 given in Section 2, H(t) can be estimated using
a TDE (Youcef-Toumi and Ito, 1990) as:
ˆ
H(t)
∼
=
H(t − L)
= τ(t − L) − M ¨q(t − L) (15)
where L is the estimation time delay. Clearly the accu-
racy of
ˆ
H(t) improves as L decreases. In practice, the
smallest possible value of L is the sampling period.
The time delayed ¨q(t − L) signal can be obtained by
one of the following approximation:
¨q(t − L) =
q(t − L) − 2q(t − 2L) + q(t − 3L)
L
2
(16)
¨q(t − L) =
˙q(t − L) − ˙q(t − 2L)
L
(17)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
228

Theorem 1. The proposed non-singular terminal sec-
ond order sliding mode with time delay estimation for
the uncertain robot system in Eq. (1) is given by:
τ(t) =
ˆ
H(t) + M
Z
t
0
u(t)dt
= τ(t − L) − M
¨q(t − L) −
Z
t
0
u(t)dt
(18)
where u(t) is defined in Eq. (13) and the switching
gains K
i
of Eq. (10) for i = 1, ··· ,n satisfy:
K
i
> δ
i
(19)
where δ
i
are positive constants that represents the
bounds of the derivative of the TDE error. In addi-
tion, the proposed controller ensures the convergence
of the sliding surfaces S
i
to zero in a finite-time:
t
r(i)
≤
|S
i
(0)|
(K
i
− δ
i
)
f or i = 1,·· · , n (20)
Proof. For the stability analysis of the overall sys-
tem, we have to ensure that S converges to zero. To
that end, the following Lyapunov function is selected:
V =
1
2
S
T
S (21)
Then, calculating its time derivative and substituting
the derivative of the control law
˙
τ calculated from
Eq. (18) gives:
˙
V = S
T
˙
S
= S
T
M
−1
˙
τ −
˙
H(t)
− q
(3)
d
+ λ
1
¨
ε + λ
2
˙
E + λ
3
˙
σ
= S
T
M
−1
h
˙
ˆ
H(t) −
˙
H(t)
i
− Ksign(S)
=
n
∑
i=1
S
i
1
m
ii
h
˙
ˆ
H
i
(t) −
˙
H
i
(t)
i
− K
i
sign(S
i
)
=
n
∑
i=1
S
i
1
m
ii
∆
˙
H
i
− K
i
|S
i
|
≤
n
∑
i=1
|S
i
|
1
m
ii
|∆
˙
H
i
| − K
i
(22)
Where ∆
˙
H
i
=
˙
ˆ
H
i
(t) −
˙
H
i
(t) denotes the derivative
of the TDE error. Otherwise, based on Assumption 3
∆
˙
H
i
is bounded as follows:
|∆
˙
H
i
| < δ
0
i
(23)
Then, Eq. (22) becomes:
˙
V ≤
n
∑
i=1
|S
i
|(δ
i
− K
i
) (24)
where δ
i
=
1
m
ii
δ
0
i
. Hence, to ensure
˙
V negative-definite
for Lyapunov stability, the following condition must
be satisfied:
K
i
> δ
i
(25)
In addition, to prove the finite-time convergence
of the proposed controller, let us recall Eq. (24). Then,
eliminating the sum, dividing by |S
i
| and integrating
both sides between 0 and t gives:
Z
t
0
|
˙
S
i
|dt ≤
Z
t
0
(δ
i
− K
i
)dt
|S
i
(t)| − |S
i
(0)| ≤ (δ
i
− K
i
)t
(26)
Assuming that t
r
is the time required to reach S
i
such as |S
i
(t
r
)| = 0, one has:
t
r
≤
|S
i
(0)|
(K
i
− δ
i
)
(27)
This completes the proof.
Remark 1. In real-time, the measured signals are
contaminated by noise. The noise effect might be am-
plified when ¨q
t−L
is obtained using one of the approx-
imations in Eq. (16) and Eq. (17). To solve this prob-
lem, a LowPass Filter (LPF) may be used before im-
plementing the controller. However, the attenuation
of noise without using a LPF is possible by choosing
small values for M (Jin et al., 2011).
If a digital LPF with the cutoff frequency γ is
adopted, the control law can be modified as follows:
τ
f
t
= γL(1 + γL)
−1
τ
t
+ (1 + γL)
−1
τ
f
t−L
(28)
where τ
t
denotes the calculated input before the filter
and τ
f
t
denotes the filtered control input. Substituting
τ
t
by its expression in (18), gives:
τ
f
t
= τ
f
t−L
+ γL(1 + γL)
−1
M(
Z
t
0
[u
t
dt] − ¨q
t−L
) (29)
Comparing Eq. (29) with the controller in Eq. (18),
then:
M
0
= γL(1 + γL)
−1
M (30)
Since γL(1 + γL)
−1
< 1, then, for very small value
of M, the same effect as using a digital LPF will be
obtained.
4 SIMULATION
In this section, the proposed controller is used for tra-
jectory tracking of an uncertain rigid manipulator sys-
tem. The finite-time convergence is illustrated in this
example. In addition, a comparison with another ro-
bust controller is presented to prove the effectiveness
of the proposed non-singular terminal sliding mode
control with time delay estimation.
Non-singular Terminal Second Order Sliding Mode with Time Delay Estimation for Uncertain Robot Manipulators
229
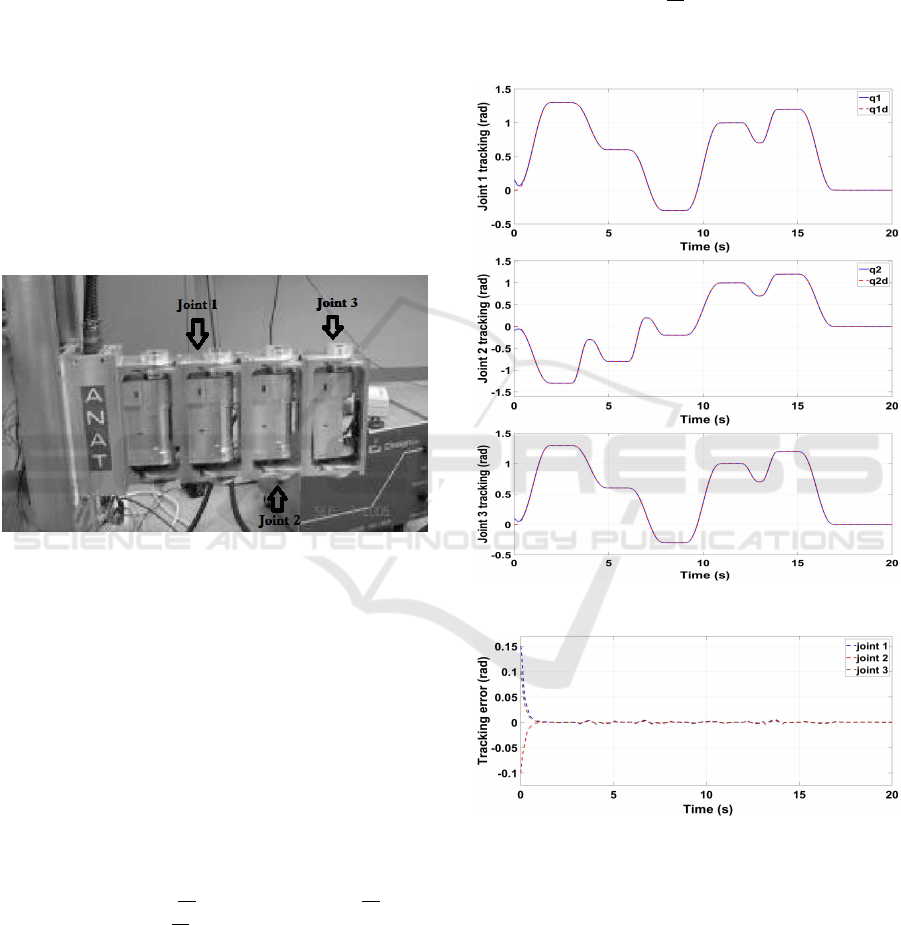
4.1 Robot System
The considered robot here is the 3-DOF ANAT robot
arm shown in Fig. 3. ANAT stands for Articulated
Nimble Adaptable Trunk. The dynamic model is fur-
ther specified in (Fallaha et al., 2011) by the well-
known equation for rigid manipulators in Eq. (1). The
system parameters are specified in (Kali et al., 2015).
The initial values of the joint position and velocity
are chosen as q
1
(0) = 0.15rad, q
2
(0) = −0.1rad,
q
3
(0) = 0.1rad and ˙q
1
(0) = ˙q
2
(0) = ˙q
3
(0) = 0rad/s.
The robot model used for simulation verifies the prop-
erties and assumptions given in Section 2. The distur-
bances τ
d
are considered in this paper as:
τ
d
=
2sin(t) + 0.5sin(200πt)
cos(2t) + 0.5sin(200πt)
sin(t) + 0.5sin(200πt)
(31)
Figure 3: 3-DOF ANAT robot arm.
4.2 Controller Setting
The proposed controller has five diagonal matrices
with positive constant elements and two positive con-
stant elements that make the controller setting simple.
The steps are briefly described as follows:
• Select the matrices λ
1
, λ
2
and the positive coeffi-
cients α and β of the non-singular terminal sliding
surface in Eq. (4).
• Select the matrix λ
3
of the second order sliding
surface in Eq. (9).
• Select L as small as possible (equal to the sam-
pling time interval T
s
).
• Tuning the matrix
M such as kI −M(q)
−1
Mk < 1.
The elements of M are chosen to be small posi-
tive values and increased gradually, while check-
ing the control performance by trial and error.
• The switching gain matrix K in Eq. (10) is cho-
sen such as the condition of stability in Eq. (25) is
verified, K should be further tuned to achieve the
optimal performance.
4.3 Results
The controller gains are chosen such the stability con-
dition is met:
λ
1
= diag(5,5,5), λ
2
= diag(2,2,2),
λ
3
= diag(30,30,30), M = diag(0.15,0.15,0.15),
K = diag(2,2,2), β = 0.4, L = 0.01s
Figure 4: Joint space tracking trajectory.
Figure 5: Joint space tracking error.
The results are shown in Fig. 4 through Fig. 6.
The proposed controller ensures the finite-time con-
vergence of the joint position to the desired position
with high accuracy, due to a good estimation of un-
certainties and disturbances as shown in Fig. 4 and
confirmed by the small joint space tracking error in
Fig. 5. Furthermore, it can be seen from Fig. 6 that
the control torque inputs are chattering free.
To evaluate the performance of the proposed con-
troller, it is compared to the classical sliding mode
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
230

Figure 6: Control torque input.
with time delay in (Kali et al., 2015). The controller
gains are chosen as:
λ = diag(5,5,5),
M = diag(0.15,0.15, 0.15),
K = diag(2,2,2), L = 0.01s
The obtain results are given in the figures below.
Figure 7: Joint space tracking trajectory.
Comparing the results for both controllers, the
tracking performances are similar as depicted in Fig. 4
Figure 8: Joint space tracking error.
Figure 9: Control torque input.
and Fig. 7 and confirmed in Fig. 5 and Fig. 8. How-
ever, it is clear that the chattering is still present in the
second method as shown in Fig. 9, while it is com-
pletely removed in the proposed method due to the
integration of the discontinous signal of the sign func-
tion as can be seen in Fig. 6
5 CONCLUSION
For an n-DOF uncertain robot manipulator, a new
non-singular terminal second order sliding mode with
time delay estimation is presented in order to achieve
the control objective. A sufficient condition of sta-
bility is established using Lyapunov theory. The pro-
posed controller allows uncertainties estimation, chat-
tering reduction and finite-time convergence, while
the sliding surface ensures faster convergence in com-
parison with the classical linear sliding surface and
solves the problem of singularity of the classical ter-
minal sliding surface. Simulation results and com-
Non-singular Terminal Second Order Sliding Mode with Time Delay Estimation for Uncertain Robot Manipulators
231

parative study on a 3-DOF ANAT robot manipulator
show the effectiveness of the proposed controller.
ACKNOWLEDGEMENTS
This work was supported by Ecole de Technologie
Sup
´
erieure, Montreal, Canada and Ecole Mohamma-
dia d’Ing
´
enieurs, University of Mohammed V, Rabat,
Morocco.
REFERENCES
Boiko, I. and Fridman, L. (2005). Analysis of chattering in
continuous sliding-mode controllers. IEEE Transac-
tions on Automatic Control, 50:1442–1446.
Cao, Y. and Chen, X. B. (2014). Disturbance-observer-
based sliding-mode control for a 3-dof nanoposition-
ing stage. IEEE/ASME Transactions on Mechatronics,
19(3):924–931.
Craig, J. J. (1989). Introduction to Robotics: Mechanics
and Control. Addison-Wesley Longman Publishing
Co., Inc., Boston, MA, USA, 2nd edition.
Fallaha, C., Saad, M., Kanaan, H., and Al-Haddad, K.
(2011). Sliding-mode robot control with exponential
reaching law. IEEE Transactions on Industrial Elec-
tronics, 58.
Fridman, L. (2001). An averaging approach to chattering.
IEEE Transactions on Automatic Control, 46:1260–
1265.
Fridman, L. and Levant, A. (2002). Higher order sliding
mode. In Systems and Control Book Series.
Guo, Y. and Woo, P.-Y. (2003). An adaptive fuzzy slid-
ing mode controller for robotic manipulators. IEEE
Transactions on Systems, Man, and Cybernetics - Part
A: Systems and Humans, 33(2):149–159.
Hsia, T. and Gao, L. (1990). Robot manipulator control
using decentralized linear time-invariant time-delayed
joint controllers. IEEE International Conference on
Robotics and Automation,, 3:2070–2075.
Hsia, T. C. and Jung, S. (1995). A simple alternative to
neural network control scheme for robot manipula-
tors. IEEE Transactions on Industrial Electronics,
42(4):414–416.
Jin, M., Jin, Y., Chang, P., and Choi, C. (2011). High-
accuracy tracking control of robot manipulators us-
ing time delay estimation and terminal sliding mode.
International Journal of Advanced Robotic Systems,
8:65–78.
Kali, Y., Saad, M., Benjelloun, K., and Benbrahim, M.
(2015). Sliding mode with time delay control for
mimo nonlinear systems with unknown dynamics. In
International Workshop on Recent Advances in Slid-
ing Modes, April 9-11. Istanbul, Turkey.
Khalil, H. (1992). Nonlinear Systems. Macmillan Publish-
ing Company, New York.
Levant, A. (1993). Sliding order and sliding accuracy in
sliding mode control. International Journal of Con-
trol, 58:1247–1263.
Liu, J. and Wang, X. (2012). Advanced Sliding Mode Con-
trol for Mechanical Systems. Springer.
Seraji, H. (1987). Adaptive control of robotic manipulators.
In 26th IEEE Conference on Decision and Control,
volume 26, pages 599–602.
Shtessel, Y., Edwards, C., Fridman, L., and Levant, A.
(2014). Sliding Mode Control and Observation.
Springer, New York.
Slotine, J. and Li, W. (1991). Applied nonlinear control.
Printice-Hall international.
Tran, M.-D. and Kang, H.-J. (2015). Nonsingular terminal
sliding mode control of uncertain second-order non-
linear systems. Mathematical Problems in Engineer-
ing, 2015:1–8.
Utkin, V. (1992). Sliding mode in control and optimization.
Springer-Verlag, Berlin.
Utkin, V., Guldner, J., and Shi, J. (1999). Sliding mode
control in electromechanical systems. Taylor-Francis.
Yi, S. Y. and Chung, M. J. (1997). A robust fuzzy logic con-
troller for robot manipulators with uncertainties. IEEE
Transactions on Systems, Man, and Cybernetics, Part
B (Cybernetics), 27(4):706–713.
Youcef-Toumi, K. and Ito, O. (1990). A time delay con-
troller for systems with unknown dynamics. ASME
Journal of Dynamic System, Measurement and Con-
trol, 112:133–141.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
232
