
Robustness to Inertial Parameter Errors for Legged Robots Balancing on
Level Ground
Nirmal Giftsun, Andrea Del Prete and Florent Lamiraux
Laboratory for Analysis and Architecture of Systems, 7 Avenue du Colonel Roche, 31400 Toulouse, France
Keywords:
Humanoid Robots, Robust Control, Inverse-Dynamics Control, Optimization and Optimal Control.
Abstract:
Model-based control has become more and more popular in the legged robots community in the last ten
years. The key idea is to exploit a model of the system to compute precise motor commands that result
in the desired motion. This allows to improve the quality of the motion tracking, while using lower gains,
leading so to higher compliance. However, the main flaw of this approach is typically its lack of robustness to
modeling errors. In this paper we focus on the robustness of inverse-dynamics control to errors in the inertial
parameters of the robot. We assume these parameters to be known, but only with a certain accuracy. We
then propose a computationally-efficient optimization-based controller that ensures the balance of the robot
despite these uncertainties. We used the proposed controller in simulation to perform different reaching tasks
with the HRP-2 humanoid robot, in the presence of various modeling errors. Comparisons against a standard
inverse-dynamics controller through hundreds of simulations show the superiority of the proposed controller
in ensuring the robot balance.
1 INTRODUCTION
The problem of balancing for real legged robots is
still a challenge for the robotics community. Although
our understanding of this problem has remarkably im-
proved during the last 15 years, the robustness of the
state-of-the-art control algorithms is far from satisfac-
tory. For instance, during the recent DARPA Robotics
Challenge Finals (Pratt, 2015), all legged robots have
moved extremely cautiously, and, despite that, some-
times they could not avoid falling. Another striking
fact is the difference between what robots can do in
simulation where they easily perform extremely dy-
namics tasks and what they can do in the real world
where they struggle to execute slow movements in
structured environments. The gap between simula-
tion and real world can be explained through count-
less unmodeled uncertainties affecting these systems,
such as poor torque control, model uncertainties, sen-
sor noises and delays.
In our recent work (Del Prete and Mansard, 2016) we
have proposed an optimization-based controller that
tries to ensure the satisfaction of the physical con-
straints of the robot (force friction cones, joint accel-
eration limits and torque limits) despite errors in the
joint torque tracking. In this paper we move along
the same line, designing a robust controller that can
balance a legged robot despite bounded errors in its
inertial parameters.
1.1 State of the Art
Even though the problem of robustness is long-
standing and well-identified, it remains largely unan-
swered for legged robots. Some approaches focus ex-
clusively on the stability of the system rather than on
the feasibility of the trajectories. For instance, adap-
tive control (Kelly and Carelli, 1989) and time-delay
estimation (Jin et al., 2008) try to estimate and com-
pensate online for the major errors between nominal
and real dynamic model. Virtual model control (Pratt
et al., 2001) does not rely on the dynamic model of
the robot, which ensures robustness to errors in the
inertial parameters (Dietrich et al., 2013). The main
issue of these schemes is that they do not consider
inequality constraints, which makes it hard to imple-
ment them on real systems, given the large number of
bounds to which they are subject.
Other approaches are based on hand-tunable
heuristics. For instance, a common heuristic in Task-
Space Inverse Dynamics (TSID) (Del Prete et al.,
2015) which we adopt as well is to use a secondary
task to keep the robot posture close to a reference one,
in order to keep the movements far from the joint lim-
its. Similarly, to avoid slipping/tipping, it was pro-
posed to minimize the contact moments and the tan-
gential contact forces in the null space of the main
motion task (Righetti et al., 2010). Yet another com-
mon trick during locomotion is to maintain the cen-
Giftsun, N., Prete, A. and Lamiraux, F.
Robustness to Inertial Parameter Errors for Legged Robots Balancing on Level Ground.
DOI: 10.5220/0006397800370044
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 37-44
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
37

ter of pressure close to the center of the foot (Ka-
jita and Kanehiro, 2003). The robotics literature is
filled with these kinds of heuristics, which often are
the main reason behind the successful implementa-
tions on real platforms. However, these heuristics can
not ensure feasibility in the presence of any signifi-
cant uncertainty and needs ad-hoc tuning depending
on the situation.
Finally, another class of works which includes this
paper makes use of robust optimization techniques to
formulate control and planning problems. Mordatch
et al. (Mordatch et al., 2015) considered several per-
turbed models of a humanoid robot to plan offline
a trajectory that is robust to uncertainties, reporting
success rate between 80% and 95% on a real plat-
form. Another recent work (Luo and Hauser, 2015)
has combined robust and time-scaling optimization
to plan trajectories that are robust to bounded er-
rors in friction coefficients and joint accelerations,
whose magnitude can be estimated online through it-
erative learning. Nguyen and Sreenath (Nguyen and
Sreenath, 2015) have recently exploited control Lya-
punov functions and Quadratic Programs (QPs) to en-
sure stability despite bounded uncertainties in the lin-
earized system dynamics.
Contrary to (Mordatch et al., 2015; Nguyen and
Sreenath, 2015), the uncertainties modeled in this
paper affect the parameters of the system, so they
could be identified using set-membership identifica-
tion techniques (Ramdani and Poignet, 2005). The
main contribution of this paper is a novel formula-
tion of the capture-point balance constraints, which
can be included in the Task-Space Inverse Dynam-
ics optimization problem to balance the robot despite
bounded uncertainties in its inertial parameters. Con-
trary to previous approaches that dealt with uncertain-
ties to inertial parameters, our approach allows us to
include inequality constraints in the problem formu-
lation. Thanks to this we can thus account for all the
constraints to which legged robots are subject, ensur-
ing the feasibility of the resulting trajectories.
1.2 Paper Overview
In Section 2 we model the uncertainty in the inertial
parameters of the robot through polytopes. Then we
present the TSID controller with capture-point con-
straints (Ramos et al., 2014) to ensure the balance of
the robot in case of no modeling errors. Section 3
presents an extension of the standard capture-point
inequalities that is robust to errors in the inertial pa-
rameters. We first formulate the associated robust
optimization problem, and then use standard robust-
optimization techniques to reformulate it in a tractable
form.
Section 4 presents statistical results that compares
in simulation the standard and the robust controller in
a reaching task with the humanoid robot HRP-2 at dif-
ferent conditions. Regardless of the simulation condi-
tions, our results empirically demonstrate the superi-
ority of the proposed robust controller with respect to
standard TSID. Finally, Section 5 draws the conclu-
sions and discusses the future work.
2 INVERSE DYNAMICS IN TASK
SPACE WITH CAPTURE POINT
BALANCE CONSTRAINTS
To design a controller that is robust to errors in the
inertial parameters of the robot we have first to un-
derstand how these errors affect the control action. In
this section we define the inertial parameters and we
present a standard Task-Space Inverse Dynamics con-
troller, which includes balance constraints. Through-
out the presentation we explicitly show the depen-
dency of the terms on the inertial parameters, while
we omit the dependency on the robot configuration q
and velocities v because they are constant values at
each time step.
2.1 Inertial Parameters
We define the vector containing the 10 inertial param-
eters of link i as:
φ
i
= (m
i
,m
i
i
c
i
,I
xx
i
,I
xy
i
,I
xz
i
,I
yy
i
,I
yz
i
,I
zz
i
),
where m
i
∈ R is the mass, c
i
∈ R
3
is the center of
mass, I
i
∈ R
3×3
is the 3D rotational inertia matrix.
Both c
i
and I
i
are expressed in the local reference
frame of the link. Note that φ
i
does not contain di-
rectly c
i
, but it contains only its product with m
i
. This
is because the robot dynamics can be written in a lin-
ear form with respect to this parameterization of the
inertial parameters (Traversaro et al., 2015).
Now we can collect the inertial parameters of all
the N links of the robot in a single vector:
φ = (φ
1
,... ,φ
N
)
We assume that each link parameters φ
i
are not known
exactly, but we know that they lie inside a polytope
U
i
, i.e. φ
i
∈ U
i
. Hence also the vector φ lies inside a
polytope:
φ ∈ U = U
1
× ··· ×U
N
Note that since a polytope can be represented by a
set of linear inequalities, the constraint φ
i
∈ U
i
can be
expressed under the form A
i
φ
i
≤ a
i
.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
38

2.2 Task-space Inverse Dynamics
Now that we defined the inertial parameters and the
associated uncertainty polytopes, we can see how
these uncertainties affect the controller.
The controller that we consider in this paper is
an optimization-based inverse dynamics controller,
which has become a standard for the control of legged
robots in recent years (Del Prete et al., 2015; Her-
zog et al., 2016; Sentis and Khatib, 2004; Saab et al.,
2011). Various formulations of the TSID optimiza-
tion problem exist and are often equivalent or simi-
lar (Del Prete et al., 2015). We write it here as an
optimization problem of the base and joint acceler-
ations ˙v ∈ R
n+6
, the contact forces f ∈ R
k
, and the
joint torques τ ∈ R
n
(Saab et al., 2013):
minimize
y=( ˙v, f ,τ)
||Ay − a||
2
subjectto
M(φ) −J
>
c
−S
>
J
c
0 0
˙v
f
τ
=
−h(φ)
−
˙
J
c
v
|τ| ≤ τ
max
(1a)
˙v
min
≤ ˙v ≤ ˙v
max
(1b)
f ∈ K (1c)
where J
c
∈ R
k×(n+6)
is the constraint Jacobian, M ∈
R
(n+6)×(n+6)
is the mass matrix, h ∈ R
n+6
contains
the bias forces, S ∈ R
n×(n+6)
is the selection matrix,
τ
max
∈ R
n
are the maximum joint torques, ˙v
min/max
∈
R
n+6
are the acceleration bounds
1
, and K is the force
friction cone (which is typically linearized). The cost
function represents the error of the task, which is typ-
ically an affine function of ˙v (i.e. a task-space accel-
eration):
J
task
0 0
| {z }
A
y − ( ¨x
des
task
−
˙
J
task
v)
| {z }
a
= ¨x
task
− ¨x
des
task
The task may be to track a predefined trajectory of a
link, of the center of mass of the robot, or to regulate
the robot angular momentum.
2.3 Capture Point
Regardless of the task they are performing, legged
robots must take care of balancing (i.e. avoiding
to fall) at the same time. Balancing is fundamental
for legged robots and it has been extensively stud-
ied (Collette et al., 2008; Morisawa et al., 2012;
Goswami and Kallem, 2004; Hyon and Cheng, 2006;
1
The bounds of the joint positions and velocities are typ-
ically converted into joint-acceleration bounds (Rubrecht
et al., 2010)
Sherikov et al., 2014). This problem is particularly
well understood for robots in contact with a flat ter-
rain only. In this case, the dynamics of the robot CoM
c is well approximated by a linear inverted pendulum.
In this model the robot is approximated as a point
mass (maintained at a constant height) supported by
a variable-length leg link (Pratt et al., 2006). The re-
sulting dynamics is:
¨c
xy
(φ) = ω(φ)
2
(c
xy
(φ) − u),
where u ∈ R
2
is the Zero Moment Point (ZMP), which
is equivalent to the center of pressure (Wieber, 2002),
and ω(φ) =
q
g
c
z
(φ)
. The same dynamics can also be
obtained from the real dynamics of the robot CoM,
by assuming that ˙c
z
= 0 and the rate of change of the
robot angular momentum is null (Wieber et al., 2015).
Using this linear dynamics we can compute the point
on the ground where the robot can put its ZMP to in
order to stop its CoM:
ξ(φ) = c
xy
(φ) +
˙c
xy
(φ)
ω(φ)
This point is known as the capture point (Pratt et al.,
2006), the divergent component of motion or the ex-
trapolated center of mass (Wieber et al., 2015).
2.4 Capture-point Balance Constraints
Originally, the capture point was used to decide where
to make the robot step in order to recover from a
push (Pratt et al., 2006). More recently, Ramos et
al. (Ramos et al., 2014) proposed use it to ensure the
balance of the robot. The key idea is that, as long as
the capture point remains inside the convex hull of the
contact points (i.e. the so-called support polygon S),
the robot can balance without taking a step. To ensure
the balance of the robot we can then add to (1) an-
other set of inequalities to constrain the capture point
to remain inside the support polygon:
B(ξ(φ) + ∆t
˙
ξ(φ)) ≤ b,
where
˙
ξ(φ) ∈ R
2
is the time derivative of the capture
point, and the matrix B and the vector b define the sup-
port polygon (i.e. Bx ≤ b ⇐⇒ x ∈ S ). By expressing ξ
and its derivative as functions of c
xy
and its derivatives
we get:
B
c
xy
(φ) +
˙c
xy
(φ)
ω(φ)
+ ∆t
˙c
xy
(φ) +
¨c
xy
(φ)
ω(φ)
≤ b
B
c
xy
(φ) + α(φ) ˙c
xy
(φ) +
∆t
ω(φ)
¨c
xy
(φ)
≤ b,
where α(φ) = ∆t + ω(φ)
−1
. Finally we can express
the CoM acceleration ¨c
xy
as a function of the joint
accelerations ˙v:
D(φ) ˙v + B (c
xy
(φ) + α(φ) ˙c
xy
(φ) + β(φ)) ≤ b, (2)
Robustness to Inertial Parameter Errors for Legged Robots Balancing on Level Ground
39

where:
D(φ) =
∆t
ω(φ)
BJ
com
(φ)
β(φ) =
∆t
ω(φ)
˙
J
com
(φ)v
These inequalities are linear with respect to the joint
accelerations ˙v, so they can be added to the QP prob-
lem (1) to ensure the robot balance in case of no mod-
eling uncertainties.
3 ROBUSTNESS TO INERTIAL
PARAMETER ERRORS
In the previous section we saw that the inertial pa-
rameters appear in three different locations in the con-
troller optimization problem (1): i) in the mass matrix
M, ii) in the bias forces h, and iii) in the capture-point
inequalities (2). Unfortunately M and h depend on φ
in a highly-nonlinear way, so it is hard to deal with
it. In this paper we deal instead with the dependency
of the capture-point inequalities (2) on the inertial pa-
rameters. More in details, many terms in (2) depend
on φ, but we will focus on the dependency of the CoM
xy coordinates on φ. In other words, we want to solve
this optimization problem:
minimize
y=( ˙v, f ,τ)
||Ay − a||
2
subjectto
M(
ˆ
φ) −J
>
c
−S
>
J
c
0 0
˙v
f
τ
=
−h(
ˆ
φ)
−
˙
J
c
v
(3a)
(1a),(1b), (1c)
D(
ˆ
φ) ˙v + Bc
xy
(φ) ≤
¯
b(
ˆ
φ) ∀φ ∈ U, (3b)
where
ˆ
φ are the nominal inertial parameters (i.e. those
used by the standard controller) and:
¯
b(
ˆ
φ) = b − B(α(
ˆ
φ) ˙c
xy
(
ˆ
φ) + β(
ˆ
φ))
Problem (3) is not tractable because it has an infinite
number of inequality constraints—due to the capture-
point inequalities that need to be satisfied for all the
possible values of φ. In order to solve (3) we need
to reformulate it in a tractable form. To do that, we
will start by analyzing the relationship between c
xy
and φ (which is linear). Then we will show how to
reformulate the robust capture-point inequalities (3b)
in a tractable form.
3.1 Dependency of CoM on Inertial
Parameters
The CoM of the robot is the average of the CoM of all
its links, weighted by their respective masses:
c
xy
= P
∑
N
i=1
m
i
(p
i
+
w
R
i
i
c
i
)
m
tot
=
N
∑
i=1
m
−1
tot
P
p
i
w
R
i
0
3×6
| {z }
F
i
φ
i
=
F
1
.. . F
N
φ = Fφ,
(4)
where P =
h
1 0 0
0 1 0
i
, p
i
∈ R
3
is the position of the
reference frame of link i expressed in the world frame,
w
R
i
∈ R
3×3
is a rotation matrix from link i reference
frame to the world frame, and m
tot
is the total mass
of the robot. From (4) we can see that the robot
CoM is the ratio of two linear functions of the iner-
tial parameters—because m
tot
is clearly a linear func-
tion of φ. However, given that we can easily know the
robot total mass, we can assume that the uncertainty
in m
tot
be negligible. In the context of robustness we
can thus consider c
xy
as a linear function of φ.
3.2 Robust Capture-point Inequalities
Now we want to reformulate the robust capture-point
inequalities into a tractable form. We can start by
rewriting the i-th line of (3b) using (4):
D
i
˙v + B
i
Fφ ≤
¯
b
i
∀φ ∈ U,
where D
i
,B
i
and
¯
b
i
are the i-th lines of the associated
matrix/vector, and we dropped the dependency on the
nominal inertial parameters
ˆ
φ for the sake of readabil-
ity. We can get rid of the quantifier operator ∀ by
replacing the uncertain term with its maximum:
D
i
˙v + max
φ∈U
(B
i
Fφ) ≤
¯
b
i
(5)
We could compute the maximum of B
i
Gφ under the
constraint of φ belonging to the polytope U by solv-
ing a Linear Program (LP) for each capture-point in-
equality. However, that would be too computationally
expensive for a controller that typically has to run at
1 kHz because of the size of the LP (i.e. 10N vari-
ables and even more constraints). Luckily we show
now that we can solve this LP by solving N LPs of
much smaller size.
max
φ∈U
B
i
Fφ = max
φ∈U
N
∑
j=1
B
i
F
j
φ
j
=
N
∑
j=1
max
φ
j
∈U
j
B
i
F
j
φ
j
(6)
Thanks to this reformulation, rather than maximizing
a linear function of the robot CoM, we can maxi-
mize a linear function of each link CoM. This boils
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
40

down to finding, for each link, the CoM position that
maximizes the dot product with the vector B
i
. If the
polytope of possible CoM positions has not many ver-
tices, this optimization can be performed by enumera-
tion. This means that we can compute the dot product
of B
i
with all the vertices of the CoM polytope and
then take the one that resulted in the largest value.
Since the vertices of the CoM polytope of each link
can be computed offline before starting the controller,
this operation is extremely computationally efficient.
If we assume that each CoM polytope has n
v
ver-
tices and that the support polygon has n
s
sides, the
computation of max
φ∈U
B
i
Fφ for all i requires n
s
n
v
N
dot products of 3D vectors. For a typical scenario of
n
s
= 6, n
v
= 10 and N = 30, this gives 1800 dot prod-
ucts. On a standard computer this would take only a
few microseconds, so it is suitable for real-time con-
trol on a real robot.
Once this quantity has been computed, the robust
capture-point inequalities (3b) can be written as stan-
dard linear inequalities and problem (3) can be solved
by a standard QP solver.
4 TESTS
In this section, we present a series of simulation re-
sults that try to answer to the following question: what
improvement can we get in terms of fall prevention by
using the robust controller? We tested the proposed
controller on a typical humanoid tasks (i.e. whole-
body reaching) with the 30-degree-of-freedom hu-
manoid robot HRP-2. We carried out several batches
of tests, each batch differing for the simulated un-
certainties. Each batch was composed by 100 tests,
which is not enough for being a statistically signif-
icant sampling, but was dictated by the computation
time of our simulation environment (about 6 hours for
100 tests). Each test consisted in trying to perform the
reaching motion with the two controllers (classic and
robust) until the robot either fell or reached the end
of the motion. The inertial parameter errors changed
at each test, but they were the same for the two con-
trollers. We then measured the number of times each
controller drove the robot to a fall and the average dis-
tance between the final end-effector position and the
desired target.
4.1 Simulation Environment
To assess the proposed controller we developed a ded-
icated simulation environment based on a state-of-
the-art algorithm for frictional contacts in multibody
systems (Kaufman et al., 2008). We integrated the
Table 1: Simulation parameters.
Symbol Meaning Value
∆t Simulation time step 0.002 s
˙v
max
j
Max joint acceleration 10rad s
−2
v
max
j
Max joint velocity 9.14rad s
−1
µ Force friction coefficient 0.3
w
reach
Reaching weight 1
w
post
Posture weight 10
−2
w
f orce
Force minimization weight 10
−5
equations of motion of the system with a first-order
Euler scheme with fixed time step ∆t. Our choice
of not using an off-the-shelf simulator is motivated
by our desire to completely understand and control
the simulation environment. The inertial parameters
(masses and centers of mass) of the model used by
the controller did not match those of the model used
by the simulator. The random inertial-parameter er-
rors were generated using uniform distribution. For
masses, the maximum error was expressed in terms
of percentage of the real values. For centers of mass,
the maximum error was instead expressed in meters.
In each test we specify which uncertainties were sim-
ulated. Table 1 lists all the simulation and controller
parameters.
4.2 Task Description
The control objective was defined by three tasks that
the robot had to perform at the same time. Since the
tasks are in conflict, we weighted them with hand-
tuned parameters, according to their importance. The
three tasks, in order of decreasing priority, are:
• reach the desired target with the right end-effector
(weight w
reach
)
• maintain initial joint posture (weight w
post
)
• minimize contact moments and tangential
forces (Righetti et al., 2013) (weight w
f orce
)
We carried out two sets of simulations. In both
cases HRP-2 executed a reaching motion that made
its capture point reach the boundaries of its support
polygon.
4.3 Test 1
In this test we set the right end-effector target far in
front of the robot. Fig. 1 shows some screen shots of
the simulations. To reach the target the robot must
move its CoM (and hence also its capture point) close
to the boundaries of its support polygon. Table 2
presents the results. Regardless of the magnitude
of the inertial parameter errors, the robust controller
Robustness to Inertial Parameter Errors for Legged Robots Balancing on Level Ground
41
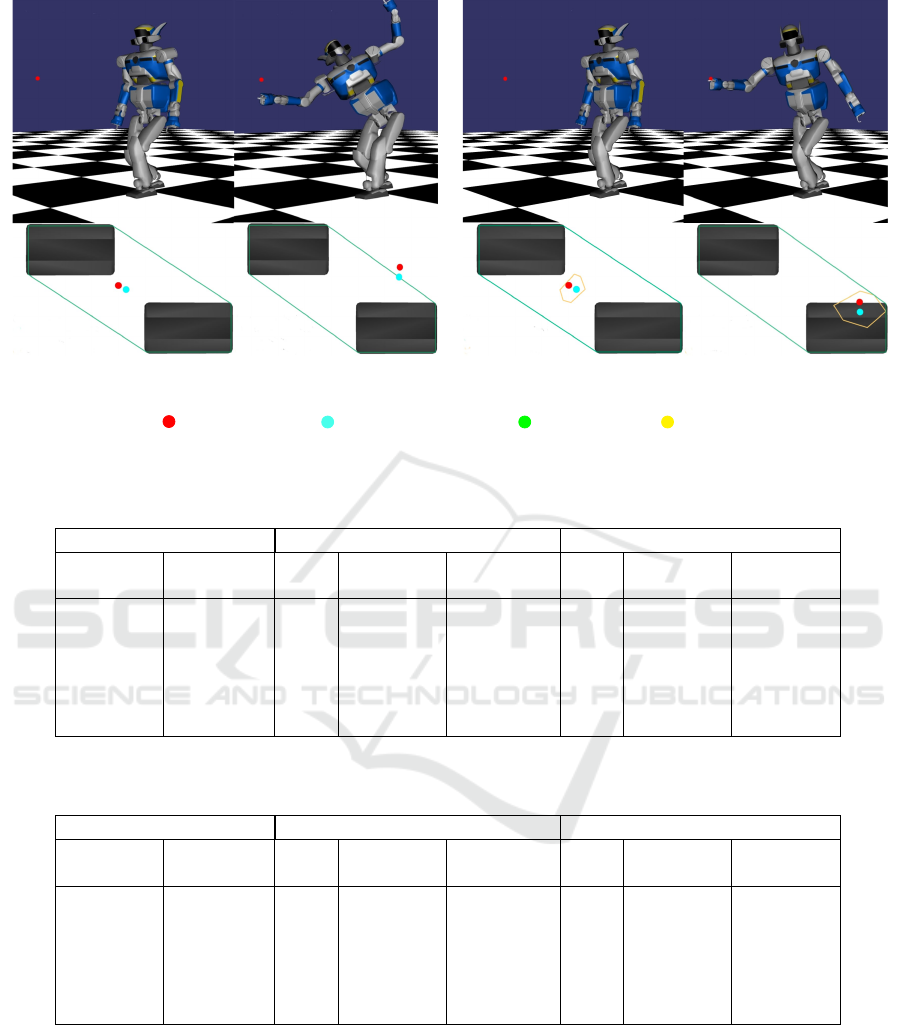
(a) Classic control illustrating the robot’s loss of balance
when the real capture point gets out of the support polygon.
(b) Robust control illustrating the robot right end effector
reaching close to the goal without losing balance.
Real Capture Point Estimated Capture Point Support Polygon Capture Point Polytope
Figure 1: Screenshots of HRP-2 executing Test 1 to reach the ball target with the robust controller.
Table 2: Results of Test 1. For each controller we show the number of falls (Falls), the average time to complete the motion
(Task Time) and the average distance of the end-effector to the target at the end of the motion (Task Error).
Uncertainties Classic Controller Robust Controller
Max Mass Max CoM Falls Task Time Task Error Falls Task Time Task Error
Error [%] Error[mm] [%] [s] [mm] [%] [s] [mm]
10 10 31 4.4 49 3 4.5 60
10 20 33 4.3 52 1 4.5 69
10 40 45 4.3 55 3 4.7 102
20 10 38 4.2 49 11 4.5 77
20 20 49 4.5 51 9 4.55 103
20 40 45 4.5 59 14 4.72 122
Table 3: Results of Test 2. For each controller we show the number of falls (Falls), the average time to complete the motion
(Task Time) and the average distance of the end-effector to the target at the end of the motion (Task Error).
Uncertainties Classic Controller Robust Controller
Max Mass Max CoM Falls Task Time Task Error Falls Task Time Task Error
Error [%] Error[mm] [%] [s] [mm] [%] [s] [mm]
10 10 29 3.94 2 0 3.4 2
10 20 35 3.4 2 2 3.0 2
10 40 42 3.86 4 0 2.6 4
20 10 43 3.6 3 0 2.8 4
20 20 45 3.5 3 0 2.5 4
20 40 45 3.0 5 0 2.1 5
managed to prevent the robot from falling almost al-
ways, while with the standard controller the robot fell
more than 30% of the times. However, since the tar-
get was far away from the robot, the robust controller
did not manage to reach it because that would have
required violating the robust balance constraints.
4.4 Test 2
In this test we moved the right end-effector target
closer to the robot, so that HRP-2 can reach it with-
out moving its CoM close to the support polygon
boundaries. However, we increased the desired speed
of reaching (by increasing the gains of the reaching
task). This affected the velocity of the CoM, which
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
42

in turns affected the capture point, making it reach
the boundaries of the support polygon. The differ-
ence with respect to Test 1 is that in this case also the
robust controller can reach the target. Table 3 sum-
marizes the results.
Similarly to Test 1, the classic controller leads the
robot to a fall in more than 30% of the cases. How-
ever, contrary to Test 1, this time the robust controller
also manages to reach the target, because it is located
closer to the robot. This test shows that being robust
does not necessarily implies that we have to sacrifice
performance.
5 CONCLUSION
This paper presented a novel optimization-based
inverse-dynamics controller that can balance a legged
robot despite bounded uncertainties in its inertial pa-
rameters. The controller is based on the state-or-the-
art control framework Task-Space Inverse Dynam-
ics. In particular, this work is based on the capture-
point inequalities (Ramos et al., 2014), which can
be included in the controller formulation to ensure
the balance of the robot on a level ground. We ex-
tended these capture-point inequalities to be robust to
bounded uncertainties in the inertial parameters of the
robot. The resulting optimization problem is still a
Quadratic Program with the same number of variables
and inequalities. Moreover, the time required for the
additional computation of the robust controller is neg-
ligible in this context (i.e. a few microseconds).
We tested the robust controller in simulations with
the HRP-2 robot, trying to reach a target position with
its right end-effector while balancing. We performed
several batches of 100 simulations each, introducing
different errors in the inertial parameters and vary-
ing the position of the target position and the required
speed of motion. Comparisons against a classic TSID
controller have shown impressive improvements in
terms of fall prevention.
5.1 Future Work
In the derivation of the robust controller we saw that
the inertial parameters appear in different terms of the
optimization problem. In this preliminary work we
focused only on how the uncertainties affect the CoM
position. We believe it should be possible to extend
this analysis to the other terms in the capture-point
inequalities: CoM velocity, CoM altitude, CoM Jaco-
bian and its time derivative. Extending it also to the
mass matrix and the bias forces is an interesting fu-
ture direction, but it seems more challenging because
of nonlinearities.
Another issue of the presented approach is that it
is rather conservative. As we saw in Test 1, this can
lead to poor performance, which can be unacceptable
on a real system. Modeling uncertainties with prob-
ability distributions (rather than with polytopes) may
lead to a less conservative behavior of the system, and
it is thus an interesting future direction. In our previ-
ous work (Del Prete and Mansard, 2016) we presented
another robust controller, which was robust to joint-
torque tracking errors. Integrating the two controllers
together seems to be feasible and it would provide ro-
bustness to both kinds of uncertainties.
In this preliminary work we focused on simula-
tions to validate the controller formulation and to test
it with different parameter errors. Of course, we plan
also to test the generated movements on the real HRP-
2 robot, to quantify how much it can benefit from this
robustness.
ACKNOWLEDGEMENTS
The work leading to these results has received funding
from the European Communitys Seventh Framework
Programme (FP7/2007-2013) under grant agreement
No. 609206.
REFERENCES
Collette, C., Micaelli, A., Andriot, C., and Lemerle, P.
(2008). Robust balance optimization control of hu-
manoid robots with multiple non coplanar grasps and
frictional contacts. Proceedings - IEEE International
Conference on Robotics and Automation, pages 3187–
3193.
Del Prete, A. and Mansard, N. (2016). Robustness to Joint-
Torque Tracking Errors in Task-Space Inverse Dy-
namics. IEEE Transaction on Robotics (accepted for
publication).
Del Prete, A., Nori, F., Metta, G., and Natale, L. (2015). Pri-
oritized Motion-Force Control of Constrained Fully-
Actuated Robots: ”Task Space Inverse Dynamics”.
Robotics and Autonomous Systems, 63:150–157.
Dietrich, A., Ott, C., and Albu-Sch
¨
affer, A. (2013).
Multi-objective compliance control of redundant ma-
nipulators: Hierarchy, control, and stability. In
2013 IEEE/RSJ international conference on intelli-
gent robots and systems, pages 3043–3050. IEEE.
Goswami, a. and Kallem, V. (2004). Rate of change of an-
gular momentum and balance maintenance of biped
robots. IEEE International Conference on Robotics
and Automation, 2004. Proceedings. ICRA ’04. 2004,
4.
Robustness to Inertial Parameter Errors for Legged Robots Balancing on Level Ground
43

Herzog, A., Rotella, N., Mason, S., Grimminger, F., Schaal,
S., and Righetti, L. (2016). Momentum control with
hierarchical inverse dynamics on a torque-controlled
humanoid. Autonomous Robots, 40(3):473–491.
Hyon, S. and Cheng, G. (2006). Gravity compensation
and full-body balancing for humanoid robots. In
Humanoid Robots, 2006 6th IEEE-RAS International
Conference on, volume 00, pages 214–221.
Jin, M., Kang, S. H., and Chang, P. H. (2008). Robust com-
pliant motion control of robot with nonlinear friction
using time-delay estimation. Industrial Electronics,
IEEE Transactions on, 55(1).
Kajita, S. and Kanehiro, F. (2003). Biped walking pattern
generation by using preview control of zero-moment
point. In Robotics and Automation (ICRA), 2003 IEEE
International Conference on.
Kaufman, D. M., Sueda, S., James, D. L., and Pai, D. K.
(2008). Staggered projections for frictional contact in
multibody systems. ACM Transactions on Graphics,
27(5):1.
Kelly, R. and Carelli, R. (1989). On adaptive impedance
control of robot manipulators. Robotics and Automa-
tion, 1989. Proceedings., 1989 IEEE International
Conference on.
Luo, J. and Hauser, K. (2015). Robust Trajectory Optimiza-
tion Under Frictional Contact with Iterative Learning.
In Robotics, Science and Systems (RSS).
Mordatch, I., Lowrey, K., and Todorov, E. (2015).
Ensemble-CIO : Full-Body Dynamic Motion Plan-
ning that Transfers to Physical Humanoids. In
Robotics and Automation (ICRA), IEEE International
Conference on.
Morisawa, M., Kajita, S., Kanehiro, F., Kaneko, K., Miura,
K., and Yokoi, K. (2012). Balance control based on
Capture Point error compensation for biped walking
on uneven terrain. IEEE-RAS International Confer-
ence on Humanoid Robots, pages 734–740.
Nguyen, Q. and Sreenath, K. (2015). Optimal Robust Con-
trol for Bipedal Robots through Control Lyapunov
Function based Quadratic Programs. In Robotics, Sci-
ence and Systems (RSS).
Pratt, G. (2015). http://www.theroboticschallenge.org/.
Pratt, J., Carff, J., Drakunov, S., and Goswami, A. (2006).
Capture Point: A Step toward Humanoid Push Recov-
ery. 2006 6th IEEE-RAS International Conference on
Humanoid Robots.
Pratt, J., Chew, C.-m., Torres, A., Dilworth, P., and Pratt, G.
(2001). Virtual model control: An intuitive approach
for bipedal locomotion. The International Journal of
Robotics Research, 20(2):129–143.
Ramdani, N. and Poignet, P. (2005). Robust Dynamic Ex-
perimental Identification of Robots With Set Mem-
bership Uncertainty. IEEE/ASME Transactions on
Mechatronics, 10(2):253–256.
Ramos, O. E., Mansard, N., and Soueres, P. (2014). Whole-
body Motion Integrating the Capture Point in the Op-
erational Space Inverse Dynamics Control. In Hu-
manoid Robots (Humanoids), 2014 14th IEEE-RAS
International Conference on.
Righetti, L., Buchli, J., Mistry, M., Kalakrishnan, M., and
Schaal, S. (2013). Optimal distribution of contact
forces with inverse dynamics control. The Interna-
tional Journal of Robotics Research, (January).
Righetti, L., Buchli, J., Mistry, M., and Schaal, S.
(2010). Inverse Dynamics With Optimal Distribu-
tion of Ground Reaction Forces for Legged Robots.
In Emerging Trends in Mobile Robotics - Proceedings
of the 13th International Conference on Climbing and
Walking Robots and the Support Technologies for Mo-
bile Machines, pages 580–587, Singapore. World Sci-
entific Publishing Co. Pte. Ltd.
Rubrecht, S., Padois, V., Bidaud, P., and De Broissia,
M. (2010). Constraints Compliant Control : con-
straints compatibility and the displaced configuration
approach. In IEEE/RSJ Intenational Conference on
Intelligent Robots and Systems (IROS).
Saab, L., Mansard, N., Keith, F., Fourquet, J.-Y., and
Soueres, P. (2011). Generation of dynamic motion
for anthropomorphic systems under prioritized equal-
ity and inequality constraints. Robotics and Automa-
tion, IEEE International Conference on, pages 1091–
1096.
Saab, L., Ramos, O. E., Mansard, N., Soueres, P., and
Fourquet, J.-y. (2013). Dynamic Whole-Body Mo-
tion Generation under Rigid Contacts and other Uni-
lateral Constraints. IEEE Transactions on Robotics,
29(2):346–362.
Sentis, L. and Khatib, O. (2004). Task-oriented control of
humanoid robots through prioritization. International
Journal of Humanoid Robotics, pages 1–16.
Sherikov, A., Dimitrov, D., and Wieber, P.-b. (2014). Whole
body motion controller with long-term balance con-
straints. In Humanoid Robots (Humanoids), 2014 14th
IEEE-RAS International Conference on.
Traversaro, S., Del Prete, A., Ivaldi, S., and Nori, F. (2015).
Inertial parameters identification and joint torques es-
timation with proximal force / torque sensing. In
Robotics and Automation (ICRA), 2015 IEEE Inter-
national Conference on.
Wieber, P.-B. (2002). On the stability of walking systems.
In Proceedings of the International Workshop on Hu-
manoid and Human Friendly Robotics, pages 1–7.
Wieber, P.-B., Tedrake, R., and Kuindersma, S. (2015).
Modeling and Control of Legged Robots. In Bruno Si-
ciliano and Oussama Khatib, editors, Springer Hand-
book of Robotics, 2nd Ed, chapter 48.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
44
