
Different Intelligent Approaches for Modeling the
Style of Car Driving
Jose Aguilar
1,2,3
, Kristell Aguilar
1
, Danilo Chávez
2
, Jorge Cordero
3
and Eduard Puerto
4
1
CEMISID, Universidad de Los Andes, Mérida, Mérida, Venezuela
2
Escuela Politécnica Nacional, Pichincha, Quito, Ecuador
3
DCCE, Universidad Técnica Particular de Loja, Loja, Ecuador
4
GIDIS, Universidad Francisco de Paula Santander, Cúcuta, Colombia
Keywords: Hierarchical Patterns, Fuzzy Logic, Chronicles, Dynamic Pattern Recognition, Style of Driving.
Abstract: In this paper, we propose a hierarchical pattern of the style of driving, which is composed of three levels, one
to recognize the emotional state, other to recognize the state of the driver, and finally, the last one corresponds
to the style of driving. Each level is defined by different types of descriptors, which are perceived in different
multi-modal ways (sound, vision, etc.). Additionally, we analyze three techniques to recognize the style of
driving, using our hierarchical pattern, one based on fuzzy logic, another based on chronicles (a temporal
logic paradigm), and another based on an algorithm that models the functioning of the human neocortex,
exploiting the idea of recursivity and learning in the recognition process. We compare the techniques
considering the dynamic context where a car driver operates.
1 INTRODUCTION
With the popularity of advanced systems driver
assistance (ADAS) in vehicles, and setting the
context of a man-machine system, the problem of
interaction between drivers and ADAS becomes
important, but more important is how adapts it to the
characteristics of each driver.
In order to make the ADAS can suit to individual
drivers, it is necessary that the ADAS can count
adaptive systems that can consider internal
characteristics of each human being, as fatigue,
inattention, and in this case, its type of driving (Lin et
al. 2014). There are a lot of work about the emotions
in a car, e.g., in (Aguilar et al. 2016), (Cordero &
Aguilar 2016) is proposed a recognition model of the
emotional state, using chronicles and static patterns.
On the other hand, in (Eyben et al. 2010) show how
the emotions are a key issue not only in a general
oncoming human-computer interaction, but also in
the in-car communication. (Katsis et al. 2015) present
a revision of the works in emotion recognition,
focusing on those influencing the driver's
performance. The work of (Aypar et al. 2014) is
focused on an alerting mechanism based on the driver
state recognition. (Guoying & Danpan 2016) propose
a pattern recognition approach to identify the driver
steering behavior. There are much more works about
the emotions of the car driver, but in general, they
propose simple models, or they study only the
emotions (Kolli et al. 2011), (Tawari & Trivedi
2010), (Paschero et al. 2012), (
Wang, J. et al., 2013).
The main contribution of this paper is to propose
a hierarchical pattern of the style of driving, which
consider three levels of recognition, one to recognize
the emotional state, other to recognize the state of the
driver, and finally, the last one corresponds to the
style of driving. Each level is composed of different
descriptors, which require a multi-modal approach in
order to be perceived, and they are related between
them because they are descriptors between them. In
addition, the paper analyses three techniques to
recognize the style of driving, one based on fuzzy
logic, another based on chronicles, and another based
on an algorithm that models the functioning of the
human neocortex, called Ar2P. We compare the
techniques, evaluating their capabilities to define
countersteering strategies, to adapt it to the driver, or
to Internet of things (IoT).
284
Aguilar, J., Aguilar, K., Chávez, D., Cordero, J. and Puerto, E.
Different Intelligent Approaches for Modeling the Style of Car Driving.
DOI: 10.5220/0006411902840291
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 284-291
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 FORMAL DEFINITION OF THE
PATTERN OF THE STYLE OF
DRIVING OF A CAR DRIVER
In general, a pattern can be considered as the
abstraction of a set of objects, and normally is defined
by a set of descriptors. In this paper, we propose to
model the style of driving of the car driver using a
hierarchical pattern, which is composed of 3 levels:
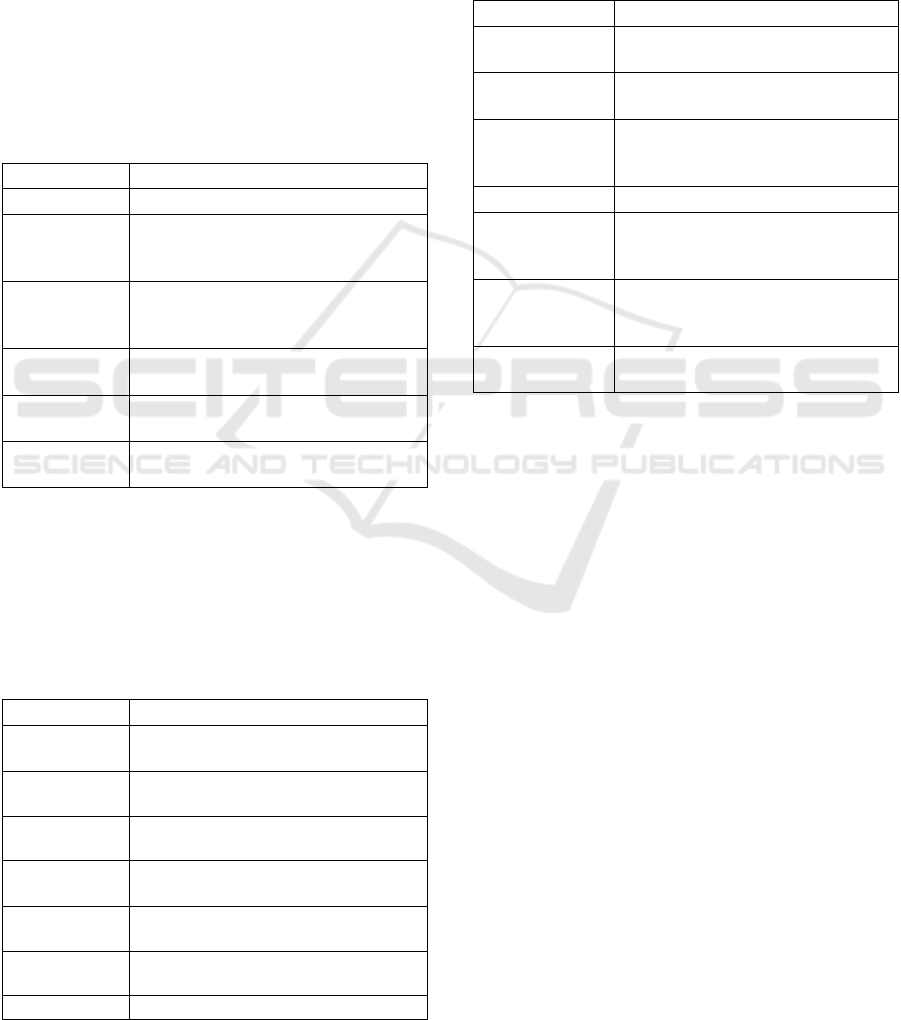
First level: Pattern of the style of driving. Its aim
is to model how the driver drives. In the literature,
classically the style of driving can be aggressive,
ecological, urban, and normal. This level must detect
the style, based on the descriptors of the Table 1.
Table 1: Descriptors of the Pattern of the style of driving.
Descriptor Description
Type of roads It describes the type of the road.
Driver state
It describes the state of the car driver,
and it is defined by the second level of
our pattern.
Emotion of the
driver
It defines the emotional state of the
driver, and it is defined by the third
level of our pattern.
Environmental
condition
It characterizes the current
environmental conditions.
States of the
road
It characterizes the current conditions of
the road.
Traffic
characteristic
It defines aspects linked to the transit
laws.
Second level: Driver state. Its aim is to describe
the state of the car driver. In the literature, normally,
the state of a car driver can be wakeful, stressed,
lethargic, pleasant, fatigued, calm, boring, falling
asleep, among others. This level must detect the state
of the driver, based on the descriptors of the Table 2.
Table 2: Descriptors of the Pattern of the driver state.
Descriptor Description
Class of the
vehicle
It describes the type of vehicle.
Action control
over the vehicle
It describes the current action of the
driver of the car.
Emotion of the
driver
See description in Table 1.
Vehicle
condition
It defines the current conditions of the
vehicle.
Characteristics
of the driver
It defines the profile of age, or physical
condition, of the driver.
Driving
experience
It characterizes the experience of the
driver as a car driver.
Driving hour It defines the current hour of the day.
Third level: Emotions of the Driver. Its aim is to
describe the emotions of the driver. This level must
detect the current emotion of the car driver.
Particularly, we are going to use the six basic
emotions defined in the literature: happiness, sadness,
fear, anger, disgust, and surprise. The descriptors that
define this pattern are described in Table 3.
Table 3: Descriptors of the Pattern of the Emotions of the
Driver.
Descriptor Description
Driver behavior
It defines the current behavior of the
driver in the vehicle.
Action control
over the vehicle
See description in Table 2.
Physiological
behavior of the
driver
It defines the current physiological
conditions of the driver.
Vehicle condition See description in Table 2
Voice
expressions of
the driver
It characterizes the current tone of
voice of the car driver.
Facial
expressions of
the driver
It characterizes the current facial
expressions of the car driver.
Body expressions
of the driver
It describes the current body
expression of the driver.
The main goal of the hierarchical pattern is to
recognize the style of driving. To recognize the
style of driving, we need different descriptors (see
Table 3), which describe it. Particularly, one of the
descriptors is the state of the driver, which again is
described by a set of descriptors (see Table 2). Other
descriptor is the emotional state of the driver, which
also is described by a set of descriptors (see Table 1).
Thus, each level has a different set of descriptors,
which are perceived in different ways (sound, vision,
etc.) that implies to use a multi-modal approach for
the perception.
The descriptors describe various aspects: facial,
acoustic, body language, among others. The current
status of the descriptors are determined by the events
that are captured in the environment of the vehicle in
a given moment. For that, we use information from
the different sensors in the car, to characterize these
events. For example, for the speed of the car, we can
define the set of events of the Table 4. And so for the
rest of descriptors of our hierarchical multimodal
model.
Now, according to the current values of the
descriptors, are determined the current emotion of the
driver, the current state of the driver, and finally,
his/her style of driving, using the hierarchical
Different Intelligent Approaches for Modeling the Style of Car Driving
285
multimodal model. Table 5 shows an example of the
possible emotions recognized by the pattern of the
third level of our hierarchical multimodal model,
according to the value of the descriptors of this
pattern. Table 6 shows an example of the possible
style of driving recognized by the pattern of the first
level of our hierarchical multimodal model, according
to the value of the descriptors of this pattern. It is
important to remark that Table 5 and 6 show some of
the emotions and styles that can be recognized, Also,
they show some of the possible combinations of the
values of the descriptors for the recognition of these
emotions and styles (e.g., Table 5 shows two
examples of events (ED2 and ED3) to recognize the
"happiness" emotion, but there may be more
combinations of values of the descriptors to recognize
it). For the possible states of the driver (second level
of our hierarchical multimodal model), it is similar.
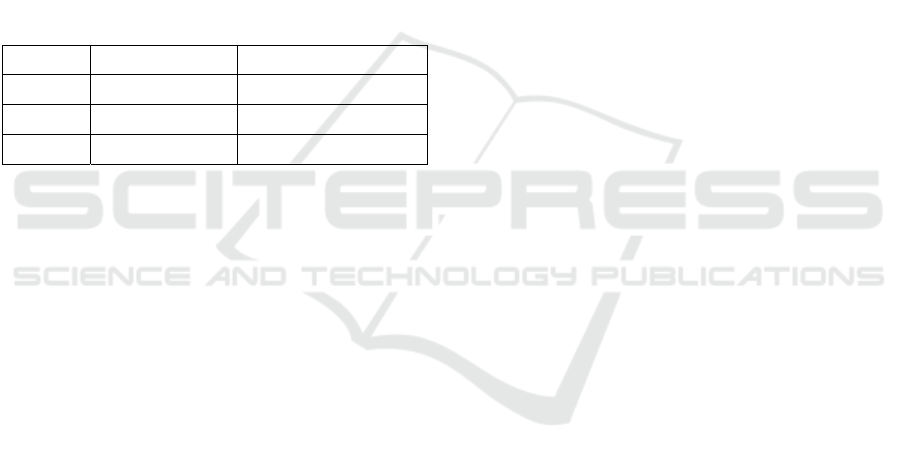
Table 4: Events about the speed of the car.
Id Event Description Speed
S1 High speed > 100 Km/h
S2 Normal speed ≥ 40 and ≤ 100 Km/h
S3 Low speed < 40 Km/h
3 APPROACHES FOR THE
MODELING OF THE STATES
OF A CAR DRIVER
3.1 Based on Chronicles
A chronicle can be defined as a set of events, linked
by a set of temporal constraints (Aguilar 2011). Each
chronicle is an event pattern with temporal
relationships between them, and a set of chronicles
characterizes the possible evolution of a system
studied. To define a chronicle, normally two
predicates are used: event and hold. An event
expresses a change in an attribute, for example:
Event(state(light): (on, off), t2). A hold specifies that
an attribute holds a value during a time interval, for
example: Hold(position(robot, home), (t2, t4)).
In general, a chronicle model C is defined by a
pair (S, T), where S is the set of events and T the
temporal constraints between the events. A chronicle
instance c of a chronicle model C is a set of event
occurrences, which is consistent with the time
constraints of C.
The hierarchical pattern recognition system based
on chronicles paradigm consists of 3 types of
chronicles: i) First type, represents the emotional
patterns of the driver. Its aim is to describe the
emotions of the driver; ii) Second type, represents the
patterns of the driver state. Its aim is to describe the
driver's condition; iii) Third type, represents the
patterns of the driving styles. Its aim is to establish
how the person drives.
Every emotion, state, or driving style of the driver
will be modelled by a different chronicle, which
contains the events and the temporal relationships to
recognize them. A specific emotion, state or driving
style can be recognized by several chronicles, an each
chronicle is defined by the set of descriptors defined
in the previous section. An example of a chronicle of
the first type, to recognize the anger, is:
Chronicle Anger {
event(F3, T4),
event(P1, T3),
event(B5, T5),
event(H1, T6 ),
event(V1, T1),
event(S1, T2)
T1 T3,
hold(F3, (4, 10)),
hold(S1,(6, 20)),
When recognized {emit event(ED1)}}
According to this chronicle, the pattern of anger
can be recognized when the voice event "Tone treble
and volume high and speaking rate fast" (V1) arrives
at time T1, and holds between 4 and 10 units of time;
the speed event "High speed" (S1) occurs at the time
T2, and holds between 6 and 20 units of time, the
pressure event "Strong pressure of the steering wheel"
(P1) appears at time T3 and it is less than or equal to
T1, the facial event " Eyes and Eyebrows open, with
curves and tight lips, and face wrinkles in the center"
(F3) ocurrs at time T4, the body event "Posture
Flattened" (B5) ocurrs at time T5, and the heart event
"Fast Heast rate" (H1) arrives at time T6.
An example of a chronicle of the third type, to
recognize an aggressive driver, is the following:
Chronicle Aggressive {
event(ED1, TED1),
event(ST3, TST3),
event(R1, T4),
event(E2, T3)
TED1 TST3,
T3 3 T4,
hold(ST3, (5, 15)),
When recognized {Report the style of driving to
the driver assistance system}}
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
286
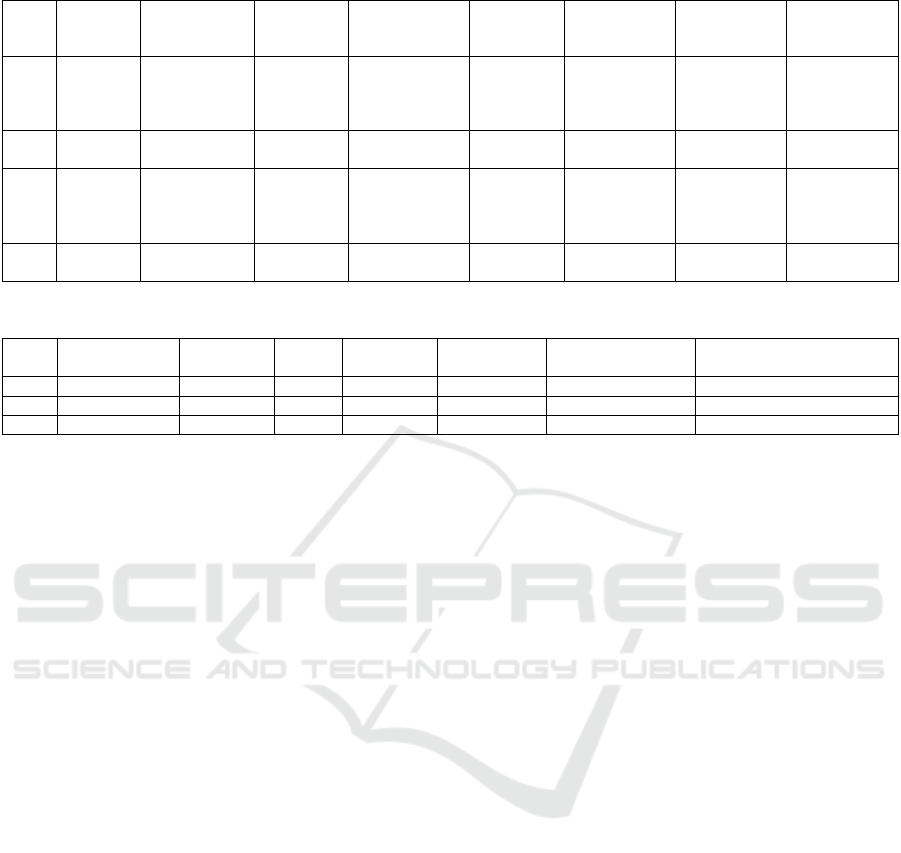
Table 5: Emotions of a driver.
Id
Event
Emotion Driver behavior Action
control over
the vehicle
Physiological
behavior of the
driver
Vehicle
condition
Voice
expressions of
the driver
Facial
expressions of
the driver
Body
expressions of
the driver
ED1 anger the car driver
pulls the door
pressing the
steering-
wheel
heart rate high,
the pupil
dilatation of the
driver high
mechanical
failure or
electrical
failure
the driver is
shouting
the driver is
serious
the driver
moves
violently
ED2 happiness the driver uses
the seat belt
normal heart rate normal normal the driver is
singing
the driver is
smiling
the driver
reacts slowly
ED3 happiness the driver uses
the seat belt
the driver is
calm
normal heart rate normal normal the driver is
whistling
the driver has a
calm face
the body of the
driver is calm
ED4 fear the driver uses
the seat belt
braking the color of the
face white
any normal the driver is
serious
Table 6: Style of driving.
Id
Event
State of the
driver
Type of
roads
Driver
state
Emotion of
the driver
Environmental
condition
States of the road Traffic characteristic
SD1 aggressive any stressed anger is raining the road has potholes does not follows traffic signs
SD2 ecological rural relaxed happiness any any follows speed limits
SD3 normal urban relaxed happiness any any any
The structure of the chronicles of the second is
similar. This is just a sample of the proposed
chronicles used by the ADAS, where: i) The emotions
(anger, happiness, fear, among others) make up the
chronicles of type 1 (EDi), representing the emotional
patterns of the driver; ii) The driver states (stress,
pleasant, wakefulness, sleepy, among others) are the
chronicles of type 2 (STi), representing the patterns
of driver states; iii) The styles of driving (aggressive,
ecological, normal) are the chronicles of type 3 (SDi),
representing the patterns of the driving styles.
The chronicles of type 1 and 2 are composed of
the primary events captured through different types of
sensors (pressure sensor on the steering wheel,
driver's heart rate sensor, speed sensor, among
others). The chronicles type 3 are a mixture of the
primary events and the events recognized in the
hierarchical system. This level communicates with
the driving system to generate the relevant actions
according to the identified driving style.
3.2 Based on Ar2P
Ar2P (Algoritmo Recursivo de Reconocimiento de
Patrones, for its acronym in Spanish) is a model for
pattern recognition, inspired in the pattern recognition
theory of mind (Puerto & Aguilar, 2016), (
Puerto &
Aguilar, 2017). Each layer in the hierarchy is an
interpretation space identified as Xi, from i=1 to m.
X1 is the level of recognition of atomic patterns, and
Xm is the level of recognition of complex patterns (a
complex pattern is characterized by being composed
of patterns of lower levels). Each level is composed
of Γji recognition modules, (for j = 1, 2, 3... # of
modules at level i). ρji is the recognized pattern by the
module j at level i. The function of each recognition
module is to recognize its corresponding pattern. s()
represents the presence of a pattern to be recognized.
This input is specific to each recognition module. For
the top-down case, the output signal of the higher-
levels is the input signal at the lower-levels.
There is a ν relationship of structural composition
among the Γji of different Xi, such that Γrt → Γlk,
where t < k, and the relationship “→“ indicates that
Γrt of Xt is contained or forms part of Γlk, which
belongs to layer Xk of higher level. There may be
different versions of the same pattern
(redundancy/robustness) represented by different Γrt,
from r = 1,2,3...until possible variations of the object
in the real world. Each level i produce an output
signal (recognition or learning) based on the
responses of its modules. The output of each Γji
consists of a specific signal of recognition of its
pattern ρji, which is transmitted through the dendrites
to its higher levels. This signal contains information
about the characteristics of the pattern that represents.
Such recognition is diffused through all the dendrites
of which the recognition module is connected. When
it is not recognized, it sends a signal that maybe
involves learning.
According to the hierarchical architecture of
Ar2P, the hierarchy of patterns to recognize the style
of driving, would be as follows: at the first level X1
are the pattern recognition modules of emotions of the
Different Intelligent Approaches for Modeling the Style of Car Driving
287

driver, at the second level X2 are the pattern
recognition modules of drive state, and finally, at the
level X3 the pattern recognition modules of style of
driving. Table 7 shows the mathematical formulation
of the recognition model. Ar2P uses dynamic pattern
recognition modules, what contains the information
needed to recognize a pattern (descriptors, weight,
etc.). Table 8 represents the structure of a pattern
recognition module (Puerto & Aguilar 2017).
Table 7: Mathematical Formulation of the Recognition
Problem.
# Equation
1
A dynamic pattern is formally defined as a 3-tuple
2
D
n
is a vector that collects all the n descriptors of d: d
i
denotes a characteristics descriptor, and d
j
denotes a
perception descriptor.
3
It is the domain vector of each characteristics descriptor
4
It is the domain vector of each perception descriptor
5
They are the change functions, specific to each descriptor.
6
It is a vector of “change event” of each descriptor.
Table 8: Structure of a dynamic pattern recognition module
(Γρ).
E
S C
Signal State Pointer (P) Weight (W)
1 F Pointer
1
[0,1]
... … … …
N F Pointer
i
[0,1]
1 F Pointer
1
[0,1]
… … … …
M F Pointer
j
[0,1]
U: <ΔU1, ΔU2>
S: S=<Signal, State> is an array that represents the set
of signals (descriptors) that conform to the pattern
recognized by Γρd and their respective states. The
state variable is "true" when the signal is present and
"false" otherwise. C= <P, W>, P are pointers to the
time series Δτd
i
(characteristics descriptor) and Δτd
j
(perception descriptor). The weight column (W)
contains the value of the descriptor importance in the
recognition. U: is the thresholds vector used by the
module (Γρd) to recognize its respective pattern.
There are two types of thresholds: ΔU1 is the
threshold for the recognition by key signals of
characteristics or perception, and ΔU2 is the threshold
for the recognition by partial or total mapping of
signals of characteristics or perception. Each module
produces a recognition signal (So), or petition signal
towards lower levels. So as petition becomes the input
signal s() for the pattern recognition modules of the
lower levels. When there's a recognition signal, it is
distributed to its higher levels attainable.
Suppose we would like to recognize an "aggressive"
pattern. Table 9 shows the instantiation of the first
level of the pattern recognition module in this case.
Table 10 shows the instantiation of the last level of
the pattern recognition module, for the case where the
driver emotion is "anger". For the rest of the emotions
of the driver, this last level is similarly instantiated.
The instantiation of the second level, for the states of
the driver, is similar.
Table 9: Structure of a dynamic pattern recognition module
for the aggressive pattern: Γρd=aggressive.
E
S C
Signal State Domain values Weight
Road rural F < Road rural>
j
0.5
Road urban F < Road urban>
j
0.6
Stressed F < Stressed>
i
0.8
Anger F < Anger>
i
0.8
Rain F <Rain>
j
0.5
Damage road F < Damage road>
j
0.6
Does not
follows traffic
signs
F < numerous traffic
tickets, reckless
driving, DWI (driving
while intoxicated),
DUI (driving under the
influence), etc.>
j
0.8
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
288
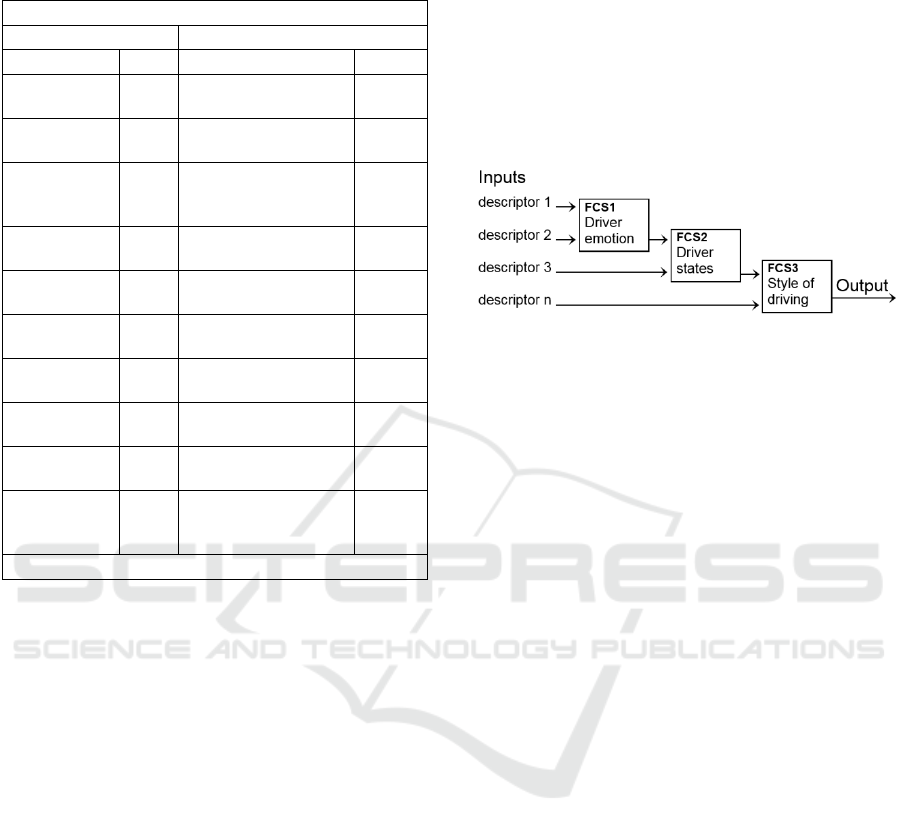
Table 10: Structure of a dynamic pattern recognition
module for the driver emotion pattern: Γρd= Anger.
E
S C
Signal State Domain Weight
The car driver
pulls the door
F < sound of strong door
>
j
0.6
High speed F < 150 Km/s ≥ speed ≤
200>
i
0.8
Strong pressing
the steering-
wheel
F < grade of pressing the
steering-wheel>
i
0.6
Pupil dilation
high
F < pupil diameter from 6
to 9 mm >
i
0.6
Heart rate high F < from 200-100
beats/min >
i
0.8
Mechanical
failure
F < mechanical failure
considered >
j
0.5
Electrical
failure
F < electrical failure
considered >
j
0.5
The driver is
shouting
F < The driver is shouting
>
i
0.8
The driver is
serious
F < The driver is serious
>
i
0.8
Driver moves
violently
F < violent movements
management considered
>
j
0.6
U: <ΔU1, ΔU2>
3.3 Based on Fuzzy Logic
A fuzzy controller is a rule-based fuzzy system,
composed of a set of inference rules of the type IF
<Condition> THEN <Action>, that defines the
control actions according to several ranges of the
controlled variables in the problem. Before these
rules can be used, all input signals must be converted
into linguistic/fuzzy variables. In general, the basic
structure of a fuzzy inference system consists of three
conceptual components: a rule base, which contains
the fuzzy rules; a set of fuzzy variables, each one
defined by a set of membership functions; and a
reasoning mechanism that performs the inference
procedure.
We propose to instance the hierarchical
multimodal model of style of driving, using a
Multilayer Fuzzy Classifier System (MFCS). In
(Camargo & Aguilar 2014) is presented a MFCS that
consists of a number of fuzzy systems hierarchically
distributed, which have the advantage that the total
number of rules of the knowledge base is smaller, and
simpler than a conventional fuzzy system. The output
of a Fuzzy Classifier System (FCS) is the input to the
next FCS.
In Figure 1, we show our MFCS model for the
recognition of the style of driving, which is composed
by three FCS, a) a FCS to recognize the emotional
state, b) a FCS to recognize the state of the driver, and
finally, c) a FCS to recognize the style of driving.
The inputs are the same descriptors defined in the
section 2 for each level, but in this case are defined as
fuzzy variables. With these fuzzy variables, we can
describe the set of fuzzy rules of each FCSi.
Figure 1: MFCS Model to recognize styles of driving.
For example, for the case of the FCS1, some of the
possible fuzzy rules are:
• If (use-horn is excessive) and (heart rate is
high) and (facial expression is very serious),
then (driver-emotion is anger).
• If (driver hits steering wheel) and (voice is
high) and (facial expression is serious), then
(driver-emotion is very anger).
For the case of the FCS3, some of the possible fuzzy
rules are:
• If (driver state is very stressed) and (emotion
is anger) then (style-of-driving is aggressive).
• If (driver state is stressed) and (weather is
raining) and (road has potholes) then (style-of-
driving is aggressive).
In the case of the FCS2, the fuzzy rules are similar.
4 COMPARISON OF
APPROACHES
In this section, we perform a qualitative comparison
considering the capabilities of each technique in three
safety-related states (Huang et al. 2010).
4.1 Counter Steering Strategies
(Reasoning Capabilities)
It consists in detecting the negative styles of driving
(aggressive, etc.), in order to guide the driver into a
positive style of driving, for safe driving:
Chronicles: We can observe the process of reasoning
based on temporal logic in a natural way with the
chronicles. For example, a pattern of an emotion like
Different Intelligent Approaches for Modeling the Style of Car Driving
289

the sadness is defined by a set of events at different
times, as facial expressions of type "eyes and
eyebrows with tears that arrive at time T1, and the
voice event " low volume" that occurs at time T2.
That is, the reasoning mechanism is based on the
events of the descriptors and their temporal
relationships, and it manages the incertitude
according to when the events occur.
Ar2P: has the ability to deal with uncertain
knowledge. This is achieved within the structures of
representation of the pattern (i.e., the pattern
recognition modules) using, among other things, the
notion of weight of the descriptors. Particularly, these
modules use meta-variables, such as weights and
value domains, which support different forms or
changes in the descriptors of a pattern. At the level of
the reasoning mechanism, it allows inferring a
situation, and navigating among the modules.
Fuzzy Logic: allows an approximate reasoning,
which implicitly can manage the incertitude, using
the idea of imprecision and information granularity in
the definition of the fuzzy descriptors of our
multimodal pattern model. The fuzzy theory provides
a mechanism for representing linguistic constructs,
such as “many,” “low,” “medium,” “often,” “few”.
Fuzzy logic provides an inference structure that
enables the utilization of these constructs in our fuzzy
descriptors, through our MFCS. Additionally, our
MFCS is an excellent strategy to describe the
different levels of our pattern model. Finally, it can
convert linguistic strategy into control actions, based
on the diagnostic process inferred.
4.2 Adaptation Strategies (Learning
Capability)
It consists in the capability of a quick adaptation to
the personality of the driver:
Chronicles: A same situation (an emotion, a style of
driving, etc.) can be described by different chronicles,
to express the diversities of contexts where a same
situation can occur (for example, an aggressive
behavior). However, the main problem is to learn the
set of chronicles required. In the literature, there are
two types of learning process in the chronicles
paradigm (Aguilar 2011): to learn the structure of a
chronicle, or to parameterize a general chronicle. This
is an open problem. In a real system like our
proposition, we can define general chronicles for each
descriptor of our model, and then parameterize these
chronicles to each driver. This approach requires a
robust chronicle database, which would be constantly
learned to adapt them to the driver and new situations.
Ar2P: uses two strategies of adaptation (Puerto &
Aguilar 2016) the first one, called new learning,
occurs when the input pattern was not recognized
(there is not a module that recognizes it). The second
one, called reinforcement learning, occurs when the
input pattern was recognized. These two learning
mechanisms allow a quick adaptation to the style of
driving of the driver. On the other hand, AR2P
paradigm has the ability to adapt their pattern
recognition modules in accordance with the
recognized patterns, readjusting the importance of the
weights, in order to improve the management of the
incertitude.
Fuzzy Logic: A FCS can learn the rules and the
structures of the fuzzy variables. That means, the
membership functions of the fuzzy variables can be
adapted to the context, and the rules of the database
can be modified (their antecedent and consequent
components) (Camargo & Aguilar 2014). For
example, when the fuzzy definition of the happy
emotions is not adequate, the membership functions
can be modified. Similarly, for the case of the fuzzy
rules, the rules must adapt to reflect the specific
patterns of each individual (maybe, the reasons of an
aggressive behavior of an individual can be very
different with respect to other individuals). To
achieve this, the FCS allows the modification of the
rules when it is presented new information.
4.3 Communication of the Driver’s
Emotional State (Communication
Capabilities)
In this case, we like to evaluate the scenario of the
IoT, where the exchange of information is natural
between heterogeneous devices, such as two vehicles.
Chronicles: The communication within different
chronicles are events. That is valid for the case where
the chronicles are in the same car, or in different cars.
These events can include specific information
required by the chronicles, but it is the only
information required. The hierarchical model of
driving patterns communicates the required messages
with the events generated by the different descriptors,
or chronicles recognized, which contains relevant
information about how drives a driver, in order to
generate the actions concerning with the recognized
driving style. In the previous scenario, the vehicle 1
(v1) sends an event to inform that the driver is “falling
asleep”, to the rest of the vehicles.
Ar2P: only need to send the signals about the
recognition of a given descriptor (for example, the
emotional state of the driver). This signal is the input
of one of the modules of recognition in the other
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
290

vehicle, such as the complex pattern is not important
to know. In the previous scenario, the vehicle 1 (v1)
sends a signal to inform that has recognized the driver
is “falling asleep” to the rest of the vehicles.
Fuzzy Logic: In this case, we have two
possibilities: to send a discrete value, which must be
defuzzifiered in the other vehicle (that is, the output
fuzzy descriptor must be defuzzifiered and sent to the
other vehicles), to send the values of the fuzzy
variables (but on the other side the fuzzy system must
be similar). The main problem is that we can have
multiple outputs (multiple active rules, which can
represent several styles of driving active), and they
must be sent to the other vehicles in order to have a
real idea of the context.
5 CONCLUSIONS
In this paper, we have proposed a hierarchical pattern
of the style of driving, which consider 3 levels of
recognition, one to recognize the emotional state,
other to recognize the state of the driver, and finally,
the last one corresponds to the style of driving. Our
model is flexible because it allows incorporate new
descriptors in the model, for example, about the
traffic flow, among other things.
In addition, the paper analyses three techniques to
recognize the style of driving, one based on fuzzy
logic, another based on chronicles, and other based on
Ar2P. We have compared these techniques in 3 cases:
for defining countersteering strategies, or its adaptive
capability to the driver, or to communicate the style
of driving of the driver recognized. Each technique
has its advantage and disadvantage, and depend on
the real context (IoT) to choose to one of them.
As future work, we will carry out the
implementation of these techniques in a simulated
context, to measure the three previous criteria using
specific metrics for each one. In this way, we will
carry out a quantitative comparison, which is
complementary to the qualitative comparison
analysed in this work.
ACKNOWLEDGEMENTS
Dr Aguilar has been partially supported by the
Prometeo Project of the Ministry of Higher
Education, Science, Technology and Innovation of
the Republic of Ecuador.
REFERENCES
Aguilar, J., 2011. Temporal Logic from the Chronicles
Paradigm : learning and reasoning problems, and its
applications in Distributed Systems. Ed. Lambert.
Aguilar, J., Chavez, D. & Cordero, J., 2016. A Dynamic
Recognition Approach of Emotional States for Car
Drivers. In Second International Conference on Techno-
logies and Innovation. Communications in Computer
and Information Science. Springer, pp. 155–168.
Aypar, Y.C. et al., 2014. Clustering of emotional states
under different task difficulty levels for the robot-
assisted rehabilitation system-RehabRoby. In 11th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO), pp. 34–41.
Camargo, E. & Aguilar, J., 2014. Hybrid intelligent
supervision model of oil wells. In IEEE International
Conference on Fuzzy Systems. pp. 934–939.
Cordero, J. & Aguilar, J., 2016. Reconocimiento multimo-
dal de emociones en un entorno inteligente basado en
crónicas. Gráficas El Portatítulo, pp.525–541.
Eyben, F. et al., 2010. Emotion on the road—necessity,
acceptance, and feasibility of affective computing in the
car. Advances in human-computer interaction.
Guoying, C. & Danpan, W., 2016. Study on Identification
of Driver Steering Behavior Characteristics Based on
Pattern Recognition. International Robotics and
Automation Journal, 1(1), pp.1–8.
Huang, C.-L. et al., 2010. Adaptive intervehicle
communication control for cooperative safety systems.
IEEE network, 24(1).
Katsis, C.D. et al., 2015. Emotion recognition in car
industry. Emotion Recognition: A Pattern Analysis
Approach, pp.515–544.
Kolli, A. et al., 2011. Non-intrusive car driver’s emotion
recognition using thermal camera. In Joint 3rd Int’l
Workshop on Nonlinear Dynamics and Synchronization
(INDS) & 16th Int’l Symposium on Theoretical
Electrical Engineering, pp. 1–5.
Lin, N. et al., 2014. An overview on study of identification
of driver behavior characteristics for automotive
control. Mathematical Problems in Engineering.
Paschero, M. et al., 2012. A real time classifier for emotion
and stress recognition in a vehicle driver. In IEEE
International Symposium on Industrial Electronics, pp.
1690–1695.
Puerto, E. & Aguilar, J., 2016. Learning Algorithm for the
Recursive Pattern Recognition Model. Applied
Artificial Intelligence, 30(7), pp.662–678.
Puerto, E. & Aguilar, J., 2017. Un algoritmo recursivo de
reconocimiento de patrones, Revista Técnica de
Ingeniería de la Universidad del Zulia, 40 (2).
Tawari, A. & Trivedi, M., 2010. Speech based emotion
classification framework for driver assistance system.
In IEEE Intelligent Vehicles Symposium), pp. 174–178.
Wang, J. et al., 2013. An adaptive longitudinal driving
assistance system based on driver characteristics. IEEE
Transactions on Intelligent Transportation Systems,
14(1), pp.1–12.
Different Intelligent Approaches for Modeling the Style of Car Driving
291
