
Plane Equation Features in Depth Sensor Tracking
Mika Taskinen, Tero S
¨
antti and Teijo Lehtonen
University of Turku, Department of Future Technologies, 20014 Turun Yliopisto, Finland
Keywords:
Depth, Sensor, Plane, Equation, Tracking, 3D, Augmented Reality.
Abstract:
The emergence of depth sensors has made it possible to track not only monocular cues but also the actual
depth values of the environment. This is especially useful in augmented reality solutions, where the position
and orientation (pose) of the observer need to be accurately determined. Depth sensors have usually been used
in augmented reality as mesh builders and in some cases as feature extractors for tracking. These methods
are usually extensive and designed to operate by itself or in cooperation with other methods. We propose a
systematic light-weight algorithm to supplement other mechanisms and we test it against a random algorithm
and ground truth.
1 INTRODUCTION
Today the use of augmented reality solutions is in-
creasing and more efficient methods for tracking are
being developed for motion sensors and conventional
cameras. Using depth sensors in this manner is a
fairly new area, in comparison as they have not been
accurate or mobile enough to be used in augmented
reality. Over the last few years this has changed dras-
tically and now some algorithms and methods have
finally been researched for the depth sensors.
All sensors have their faults when tracking the
pose. A conventional camera might lose its track
when the captured image lacks details. Motion sensor
has to be accurate and record data in high frequency.
Even then the pose might drift unless corrected with
other methods. A depth sensor usually does not work
under sunlight conditions or when the distance to the
tracked surroundings is too great. These, and possibly
other methods, need to be combined to achieve more
robust tracking.
The advantage of depth sensors in tracking is the
actual depth data which contains real distances to tar-
get areas. These distances can be used to isolate ba-
sic formations like planes, cubes and spheres. The
data can also be used when building up a more robust
model of the surroundings.
Currently the depth sensors are mostly used to
map the surroundings of the user and tracking is usu-
ally done by a combination of motion sensors, con-
ventional cameras and location services. Some tools
for depth tracking exist, but as of yet, their usage has
been limited. As a scanning feature, Microsoft has
introduced KinectFusion to be used with Kinect to
scan objects with limited space requirements and lim-
ited depth tracking abilities (Newcombe et al., 2011).
A plane filtering method with Ransac (random) fea-
ture selection system has been suggested to fully im-
plement depth sensor tracking (Biswas and Veloso,
2012).
Due to the current limitations of the depth sen-
sors in range and accuracy, a lighter and more sys-
tematic feature and tracking algorithm is proposed to
support other tracking mechanisms. By keeping fea-
tures as plane equations, no real edges and corners are
detected, only intersections between infinite planes.
This makes the algorithm much faster than an algo-
rithm that uses computing power to detect physical
edges. Systematic detection makes plane equation
tracking a more adjustable tool while giving possibil-
ity to increase robustness. Changing the grid size can
be done on the fly, and it provides an easy tradeoff
between execution time and accuracy.
The paper is organized as follows: The paper be-
gins with introduction where we lead the reader into
the subject by presenting the problem. Next section,
Related Work, gathers references to other papers and
methods to explain the current state of the develop-
ment. The Plane Equation Detection section intro-
duces the solution (algorithm) with operation flow
and equations describing the entire method step-by-
step. We have tested our process against another one
Taskinen, M., Säntti, T. and Lehtonen, T.
Plane Equation Features in Depth Sensor Tracking.
DOI: 10.5220/0006425700170024
In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications (ICETE 2017) - Volume 5: SIGMAP, pages 17-24
ISBN: 978-989-758-260-8
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

and show the technical readings in depth in Results.
The Discussion section covers additional ideas, like
tracking, to further develop the solution. The final
section, Conclusions, summarizes the paper and the
results overall.
2 RELATED WORK
The plane equation method is not the first idea involv-
ing depth sensors and tracking since the sensors have
become consumer products. Other propositions have
been made to be used for either feature extraction or
to gather data. Here are a few of those ideas:
In a paper (Ataer-Cansizoglu et al., 2013), track-
ing is done by extracting points and planes from depth
data and an extended prediction algorithm is used.
The paper does not include details on how the actual
feature detection is accomplished.
The paper (Fallon et al., 2012), introduces Kinect
Monte Carlo Localization (KMCL) to calculate pose
from point cloud provided by a depth sensor. KMCL
uses a 3D-map of the surroundings and uses simulated
depth and color images as a comparison. The KMCL
requires a model of the tracked environment which
differentiates it from the proposed method.
For a more detailed information on different meth-
ods, please see (Taskinen et al., 2015), a literature re-
view on different depth related tracking methods in
augmented reality. The report lists a total of 21 depth
sensor related tracking and scanning articles and cat-
egorizes them by their main purpose: Localization,
reconstruction or both.
2.1 Plane Filtering
Plane filtering is a way to make the tremendous
amount of data a depth sensor produces a little eas-
ier to handle in computational sense. Any pixel-by-
pixel method becomes very unusable when the accu-
racy of one pixel can vary between 1 mm to 30 mm.
The problem is compounded by the fact that the data
is most likely handled in 3D-coordinates. To counter
this problem, the data needs to be handled in larger
groups, hence the plane filtering.
The base idea is to take only a few points (sam-
ples) from data and derive possible planes from them.
To actually use these planes in mesh building and
tracking, a further edge detection step must be per-
formed.
In the article (Biswas and Veloso, 2012) a Ransac
based plane filtering system is proposed. In short, the
plane detection is done by randomly selecting sample
points to form planes and then continuing on, again
randomly, to extend that plane with additional sam-
ples. Our approach improves stability in cases where
random sampling may result in unpredictable data
loss. Additionally, our approach is configurable dur-
ing run time, allowing a clear tradeoff between exe-
cution time and accuracy. Random selection can be
tuned in similar fashion, but the resulting behaviour
is not so easily predictable. One set of random points
can generate more than satisfactory results for a single
run, but on the next run the same number of random
points can yield sub-par results. With our approach
the results show a constant quality level for each grid
size. This allows the fine tuning to be performed in a
predictable fashion.
2.2 Simultaneous Localization and
Mapping
Simultaneous Localization And Mapping (SLAM)
has been originally developed for conventional color
cameras but the idea can be processed with depth sen-
sors also (Riisgaard and Blas, 2005). Closest prac-
tical example of depth SLAM would be KinectFu-
sion (Newcombe et al., 2011), where depth sensor is
used to map the data and aid the tracking in visually
obscure situations like in dark spaces or colorless en-
vironments.
Real-Time mapping in SLAM has always been a
problem in computer power and memory use, and in
KinectFusion case the mapped model is in a memory
limited cube of voxels. Other solutions have solved
the memory issue by limiting the quality of the map
or by using extensions to memory that may slow the
computation (Whelan et al., 2012).
The part of the SLAM our method uses, does not
require as much detail. This keeps the computation
and memory consumption at a lower level, so it will
not be an issue (See Section 5).
3 PLANE EQUATION
DETECTION
This paper introduces a new method to be used with
depth data to cover all the applications using multi-
ple tracking methods with limited computing power.
In terms of computing power, the plane equations are
relatively easy to calculate.
Detecting planes in a depth image is simple when
the right mathematical tools are being used. The three
states of the proposed plane detection are illustrated
in Figure 1. By using a split grid over the image, the
detection task can be quantified into smaller tasks. In
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
18
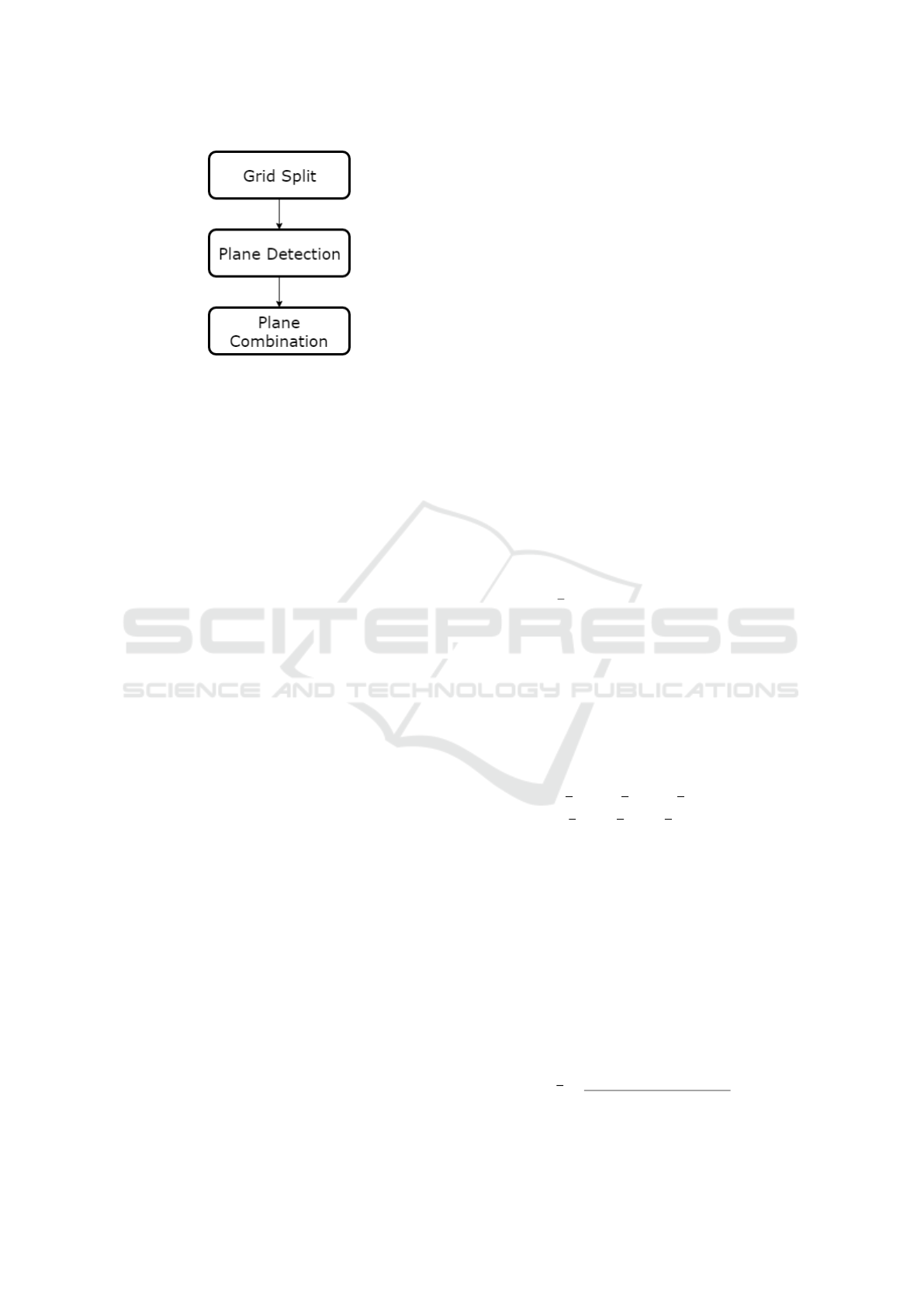
Figure 1: The three states of plane detection.
short, the grid cells will be tested for planes by using
three corner points as a plane definition. The fourth
corner point will then be used as a verifier for that
cell. If the fourth corner point belongs to the plane,
the entire cell is a plane and can be used further. It is
worth noting, that it is possible to make the detection
more robust by using more points in the cell to verify
the plane. However, such a mechanism has not been
implemented for this paper, and it remains as future
work for later.
The next phase is to combine these cell planes into
a larger whole. This is done by comparing cells by us-
ing the direction (normal) of the plane and one point
from each plane. If they match, within an acceptable
error, they will be combined into one larger plane.
This task will be repeated over all the cells that have
been detected as planes.
The final task is to filter useless information. All
the planes that do not contain enough cell planes will
be removed. For instance the corners of a room can
cause plane-like data points, when the left side of the
grid hits one wall, and the right side hits the other
wall. Situations like this are filtered out simply by
requiring that a plane must have enough supporting
cells to be accepted.
Figure 2 shows the method in use. The photo is
taken from a laboratory room to demonstrate the ef-
fectiveness of the algorithm in an environment where
there are a lot of obstructing objects. Planes detected
are named and then colored according to direction
they are facing. As can be seen, planes are detected
even when there are other objects creating distrac-
tions.
3.1 Notable Difference
Plane Equation Detection differs from any other tech-
nique mostly by detecting ”infinite” planes. This
mechanism does not directly detect physical edges of
the planes as the method is mainly intended to pro-
duce features for tracking. Edges and corners can
still be detected mathematically by using plane inter-
sections or physically by doing edge search after the
equation has been found.
In Figure 2, the planes are infinite but the visi-
ble edge is a border of the group of grid cells that
form a plane. This border can also be used to map
the real edges when needed. Mathematically calcu-
lated edges and corners are actually used in tracking
when the orientation needs to be more robust or the
location needs to be tracked. The mathematical in-
tersections provide more accuracy and stability than
directly detected corners because the calculations use
several points instead of just the corner. This averages
out much of the noise which would affect the direct
detection with full effect.
3.2 Mathematical Functions
This part describes all the mathematical functions in-
volved in plane detection.
3.2.1 Definition of Plane
The simplest way to describe a plane is with it’s nor-
mal vector (v) and one contained point (p) as illus-
trated in Figure 3. This plane can be transformed into
linear function by using Equation 1. Planes can also
be defined with two vectors instead of a normal vec-
tor. These vectors are parallel with the plane and di-
vergent with each other. With two scalars multiplied
with these vectors, any position in the plane can be
generated. In this way, the calculation of plane func-
tion is faster but intersection and inclusion calcula-
tions are slower.
v
x
∗ p
x
+ v
y
∗ p
y
+ v
z
∗ p
z
−
(v
x
∗ x + v
y
∗ y + v
z
∗ z) = 0
(1)
3.2.2 Plane from Three Points
A plane needs to be defined using three points of a
cell rectangle. The point contained by the plane can
be any of the given three points (p
1
, p
2
, p
3
) and the
direction is calculated by cross product calculation us-
ing Equation 2. If using two direction vectors is pre-
ferred, then a simple subtraction between the points
will suffice (calculation without the cross product).
For this paper the cross product has been chosen, be-
cause it will be beneficial in the following step.
v =
((p
2
− p
1
) × (p
3
− p
1
))
||p
2
− p
1
|| ∗ ||p
3
− p
1
||
(2)
Plane Equation Features in Depth Sensor Tracking
19

Figure 2: An image of real time feature extraction with Microsoft Kinect 2.
Figure 3: The definition of plane.
3.2.3 Point in Plane
Point in plane equation is used for detecting if the ear-
lier mentioned fourth point is part of the newly de-
fined cell plane. It is also used in plane similarity
comparison in the next phase. The Equation 3, which
is based on Equation 1, is used for this. This calcu-
lation requires the normal vector. When the direction
vectors are being used, a cross product must be cal-
culated to get the normal. If the cross product was
already calculated in the previous step, it can be used
directly without additional computations.
|v
x
∗ p
x
+ v
y
∗ p
y
+ v
z
∗ p
z
− (v ∗ x + v ∗ y + v ∗ z)|
||v||
2
≤ θ
(3)
In Equation 3, the θ is a threshold minimum dis-
tance of the point from the plane and it makes the
equation usable with imperfect values the depth im-
age displays.
3.2.4 Comparing Vector Direction
In order to find out, if two planes are similar, we must
check if the planes have a unifying point and are fac-
ing the same direction. For the direction, a dot prod-
uct is used according to Equation 4.
1 −
v
a
· v
b
||v
a
|| ∗ ||v
b
||
≤ θ (4)
4 RESULTS
One way to understand the benefits of the systematic
plane equation detection is to compare it with a ran-
dom detection method. It does not matter what kind of
random mechanism is used, as the point is to show the
unreliability of any random method. In this case, the
random method does predetermined amount of ran-
dom hits in the image and then tries to hit three more
times around the original point to get the four points
necessary to test for a plane equation. The rest of the
process is equivalent to the proposed plane equation
method.
Another way to compare the methods is a timed
benchmark where computation times are compared
with different parameters. As the comparison is done
between systematic and random algorithms, the re-
sults are not exact. To evaluate any random method,
an iteration of many attempts is required and these
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
20
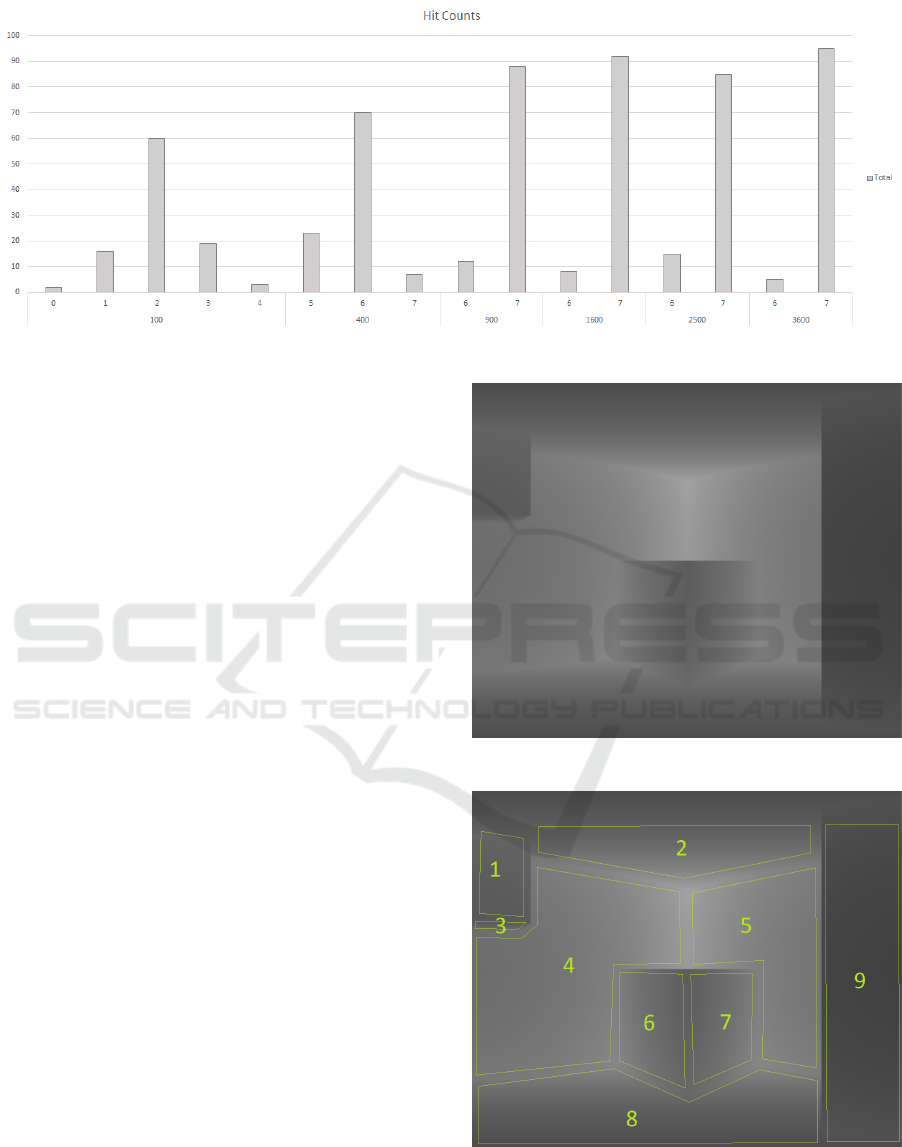
Figure 4: Distribution of plane counts for different random iteration counts.
kind of loops may be optimized at compilation or
processing. Thus, unpredictable effects may occur.
Therefore, the timed benchmark is still required to see
if the methods are even in the same level.
Both algorithms are tested using computer gener-
ated virtual depth data illustrated in Figures 5 and 6.
This provides a stable and consistent reference, un-
like the real world data from a noisy sensor, which
would be slightly different for each run even in the
same location. Also the ground truth is known and
readily available, while real world data would have to
be evaluated by a human to obtain the correct value
for each frame. The Figure 6 shows how many planes
are detected with naked eye.
The tests have a number of parameters affecting
them with similar and dissimilar parameters for each
algorithm. Most of these parameters are chosen so
that they produce the best possible result for both al-
gorithms. These parameters are shown in Table 1.
Field of View and Image Resolution are both based on
Kinect specifications. The iterations are selected to
create balance between probability testing and com-
puting time as doing more iterations take more time
and doing less result in less accurate data. The other
parameter values are selected based on experiencing.
Both algorithms have one changing variable used
in benchmark. For the systematic method it is the grid
division and for the random method it is the point
count per iteration. Figures 9 and 7 show the used
values for these variables in the x-axis (for instance
40x40=1600 means 40 by 40 grid division for the sys-
tematic algorithm and 1600 points for the random al-
gorithm). The iteration goes through same amount of
plane equation tests between algorithms in each case.
The Figure 7 shows the amount of detected planes
for both algorithms and also has the ground truth
count for reference. The random method produces a
variety of results over many iterations and the one se-
Figure 5: Depth image of ground truth.
Figure 6: Ground truth with visually detected planes.
lected for Figure 7 is the most probable one selected
from the overall test results shown in Figure 4. As
seen in Figure 4, the results can vary when random
Plane Equation Features in Depth Sensor Tracking
21
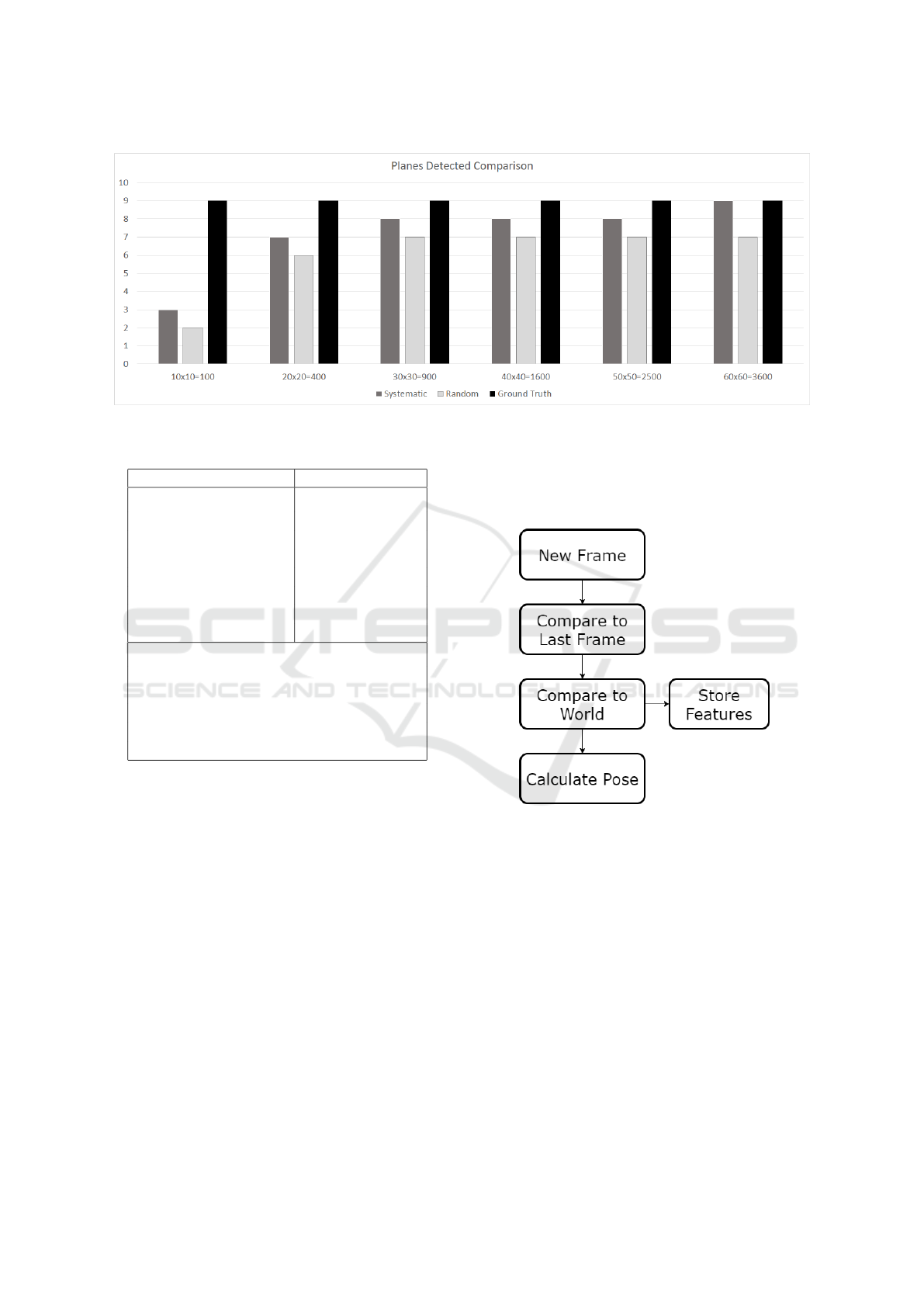
Figure 7: Comparison between random and systematic detection in detected plane count with ground truth.
Table 1: The constant parameters for benchmark.
Parameter Value
Field of View
1
100
◦
Image Resolution
1
512 x 424
Iterations
2
100
Maximum Radius
3
5
Minimum Plane Count
4
10
Minimum Radius
3
5
Normal Epsilon
5
0,1
Point Epsilon
6
0,3 [m]
1
A parameter of depth image.
2
Iteration count for random algorithm.
3
Distance variable for random point hits.
4
Required number of planes in combination stage.
5
Allowed error for direction comparison.
6
Allowed error for point-in-plane test.
selection is being used, but as the number of iteration
cycles grows, the count points more heavily towards
one value.
The timed benchmark shown in Figure 9 leans
strongly in favour of random detection. The differ-
ence in elapsed time between both methods is consid-
erable but unreliable. Since the algorithms are not op-
timized, the optimizations in the compilation and pro-
cessing phase introduce unpredictable effects to the
simulation. Thus, observer affects the observed.
5 DISCUSSION
After optimization, the feature extraction can produce
reliable timed benchmark results. In different stages
of development, the algorithm has performed differ-
ently and in some cases could even perform fast us-
ing high quality settings (60x60 grid division). Later
modifications made the library more generic and reli-
able in plane detection but slowed down the process.
Therefore, better performance can be expected.
Figure 8: The flow of the tracking part.
The subject of the paper covers features for track-
ing but not the tracking itself. In this section we in-
troduce an idea for tracking that can be implemented
with plane equation features. The phases of the track-
ing are shown in Figure 8. Tracking with plane equa-
tions begins with comparing two consecutive image
frames. To make the algorithm faster we can assume
that the sensor won’t move much between frames.
That way the planes that were detected in the last
frame are relatively close to the new ones. Planes
that have ”wandered” far can then be detected as new
planes unless the entire frame has shifted to a new po-
sition. In this case we need to match at least a few
combinations to get the best result of our new orien-
tation and position (pose). We can do a fast detection
run by finding the closest planes and then check them
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
22

Figure 9: Comparison of execution times between random and systematic detection.
by comparing the translation values (initial guess).
When the plane matching has been done and the
pose translation has been found, we can start match-
ing our new frame with a world of planes. A world
of planes is our global storage of every plane detected
so far and can be used in the detection throughout the
entire tracking session. Some new planes, detected
between frames, might have been detected already in
some earlier frame and have more precise information
on pose and can aid in tracking. Constant adjustment
of global plane collection is required.
6 CONCLUSIONS
We have shown that our plane detection algorithm is
more reliable than random detection when detecting
planes. By increasing quality (grid division), the al-
gorithm quickly approaches the ground truth plane
count. This is useful for a support algorithm as we
can have desired output with low level computation.
When enough planes have been detected, the informa-
tion is sufficient to confirm the pose the other tracking
methods have calculated.
Actual depth image is noisy and in consecutive
frames there are differences in almost every pixel. In
every feature extraction method, this problem is ad-
dressed by using strong features that are either an av-
erage of smaller components or have something very
defining in them. Combining the data into larger
planes does the same in plane equation detection, pro-
viding good tolerance towards sensor noise at a low
computational effort.
ACKNOWLEDGEMENTS
The research has been carried out during the
MARIN2 project (Mobile Mixed Reality Applica-
tions for Professional Use) funded by Tekes (The
Finnish Funding Agency for Innovation) in collabo-
ration with partners; Defour, Destia, Granlund, In-
frakit, Integration House, Lloyd’s Register, Nextfour
Group, Meyer Turku, BuildingSMART Finland, Ma-
chine Technology Center Turku and Turku Science
Park. The authors are from University of Turku, Fin-
land.
REFERENCES
Ataer-Cansizoglu, E., Taguchi, Y., Ramalingam, S., and
Garaas, T. (2013). Tracking an RGB-D camera using
points and planes. Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 51–58.
Biswas, J. and Veloso, M. (2012). Planar polygon extraction
and merging from depth images. IEEE International
Conference on Intelligent Robots and Systems, pages
3859–3864.
Fallon, M. F., Johannsson, H., and Leonard, J. J. (2012).
Efficient scene simulation for robust monte carlo lo-
calization using an RGB-D camera. Proceedings -
IEEE International Conference on Robotics and Au-
tomation, pages 1663–1670.
Newcombe, R. a., Izadi, S., Hilliges, D., Molyneaux, D.,
Kim, D., Davison, A. J., Kohi, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. (2011). KinectFusion : Real-
Time Dense Surface Mapping and Tracking. IEEE In-
ternational Symposium on Mixed and Augmented Re-
ality, pages 127–136.
Riisgaard, S. and Blas, R. (2005). Slam for dummies.
Taskinen, M., Lahdenoja, O., S
¨
antti, T., Jokela, S., and
Lehtonen, T. (2015). Depth Sensors in Augmented
Reality Solution - Literature Review.
Plane Equation Features in Depth Sensor Tracking
23

Whelan, T., Johannsson, H., Kaess, M., Leonard, J. J., and
Mcdonald, J. (2012). Robust Tracking for Real-Time
Dense RGB-D Mapping with Kintinuous. RSS Work-
shop on RGB-D: Advanced Reasoning with Depth
Cameras, page 10.
SIGMAP 2017 - 14th International Conference on Signal Processing and Multimedia Applications
24
