
Framework for Fair Comparisons of Underwater Vehicle Controllers
Showcasing the Robustness Properties of a Model-free Sliding Mode Controller
Tuned with a Random-forest-based Bayesian Optimization Approach
Musa Morena Marcusso Manh
˜
aes
1
, Sebastian A. Scherer
1
, Luiz Ricardo Douat
1
,
Martin Voss
1
and Thomas Rauschenbach
2
1
Corporate Sector for Research and Advance Engineering, Robert Bosch GmbH,
Robert-Bosch-Campus 1, 71272, Renningen, Baden-W
¨
urttemberg, Germany
2
Advanced System Technology (AST), Fraunhofer-Institute of Optronics, Systems Technologies and Image Exploitation,
Am Vogelherd 50, 98693, Ilmenau, Th
¨
uringen, Germany
Keywords:
Underwater Robotics, Robust Control, Parameter Optimization, Sliding Mode Control, SMAC, Underwater
Robotics Simulation, Gazebo.
Abstract:
Tasks with underwater vehicles present several challenges that include complex and hazardous environments,
and unmodeled and/or unknown uncertainties. The setup of positioning controllers is therefore a difficult and
laborious task and very often leads to suboptimal performance results on the field. This paper shows a frame-
work for methodical evaluation and setup of dynamic positioning controllers for underwater vehicles with
simulation-based optimization method using performance metrics. The proposed method can be configured
to be mission specific and delivers a controller configuration that also allows a fair numerical comparison
between control algorithms on similar scenarios.
1 INTRODUCTION
From underwater inspection of off-shore wind turbine
structures in depths of a few dozen meters to oil and
gas interventions in thousands of meters, remotely op-
erated vehicles (ROVs) constitute an ubiquitous en-
abler of industrial subsea activities.
The specialized literature provides several ad-
vanced model-based control strategies for underwater
vehicles (Fossen, 2011; Zhu and Gu, 2011; Molero
et al., 2011; Khadhraoui et al., 2014; Soylu et al.,
2016). Nevertheless, many algorithms still rely
on PID-like controllers due to their simple imple-
mentation (Hosseini and Seyedtabaii, 2016; Garcia-
Valdovinos et al., 2009). PID controllers can be eas-
ily tuned even when the vehicle model is unknown,
but at the expense of not intrinsically assuring robust-
ness properties against system parameter variations
and external disturbances. A promising model-free
robust alternative, based on variable structure sliding
mode control, was presented in (Garc
´
ıa-Valdovinos
et al., 2014).
In (Garc
´
ıa-Valdovinos et al., 2014), as well as in
numerous other sources in the same field, the pro-
posed controller has its parameters selected follow-
ing a trial and error procedure, which not only can-
not guarantee a good performance in the presence of
uncertain perturbations but also makes the numeri-
cal comparison with other dynamic positioning con-
trollers, even under equal scenarios, rather difficult
(Antonelli, 2014). Furthermore, considering the dif-
ficult environment in which underwater vehicles have
to be deployed regarding costs and sensor systems, a
preliminary simulation-based evaluation can be used
to decrease the number of iterations on experiments
related to controller configuration by providing a pa-
rameter set that has shown good performance metrics
in simulated scenarios.
To the best knowledge of the authors, there are to-
day no published results on optimal parameter search
applied to dynamic positioning controllers with par-
ticular focus on performance analysis, but exam-
ples can be found in other fields such as for safe
optimization of controller parameters for quadrotors
(Berkenkamp et al., 2016) and gait optimization for
bipedal locomotion (Calandra et al., 2014). Both
(Berkenkamp et al., 2016) and (Calandra et al., 2014)
rely on Gaussian processes to learn the system’s per-
formance metrics from a set of experimental data and
use this fitted model in the search for optimal param-
102
Manhães, M., Scherer, S., Douat, L., Voss, M. and Rauschenbach, T.
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode Controller Tuned with a Random-forest-based
Bayesian Optimization Approach.
DOI: 10.5220/0006427001020113
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 102-113
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
eters for the system’s controller and walking gait. As
discussed in (Calandra et al., 2014), the strategy has
been shown to converge to a near-optimal solution us-
ing a much smaller number of system runs in compar-
ison with algorithms that rely, for example, on gradi-
ent descent methods.
The objective of this paper is to create a method-
ical simulation-based procedure to search for the op-
timal parameter set for a generic controller through
minimization of a performance cost function to en-
able a fair comparison of dynamic positioning con-
trollers in equal scenarios and mission plan. The
minimizer used for the parameter search, SMAC
(”Sequential Model-based Algorithm Configuration”)
(Hutter et al., 2011; Lindauer et al., 2017), fits a ran-
dom forest model on data extracted from the perfor-
mance cost function computed after each simulation
run to search for best controller parameter set.
The performance cost function is based on perfor-
mance metrics that are derived from simulated pose
and velocity error in a scenario where the vehicle is
subjected to different types of disturbances while fol-
lowing a pre-defined trajectory. The objective is to
find parameters that will allow the vehicle to com-
plete a mission with focus on the performance for tra-
jectory tracking and disturbance rejection. The con-
trollers to be parametrized and later compared against
each other for the use-case presented in this paper are
a conventional MIMO PID controller and a model-
free sliding mode controller (Garc
´
ıa-Valdovinos et al.,
2014). Both were implemented using ROS and in-
tegrated into the UUV Simulator (Manh
˜
aes et al.,
2016a) to control a fully actuated work-class ROV.
The paper is further structured as follows. In Sec-
tion 2 an overview of the controller optimization is de-
picted. The controllers used in this use-case are pre-
sented in Section 3. The simulated scenario is shown
in detail in Section 4. The results for the optimal con-
troller parametrization are presented in 5 and a vali-
dation experiment for a different scenario is presented
in 6. Section 7 includes conclusion and discussion of
the results. The source code and the simulation envi-
ronment used to generate the results presented in the
following sections can be found at (Manh
˜
aes et al.,
2016a).
2 PERFORMANCE-BASED
CONTROLLER
PARAMETRIZATION
Performance analysis to evaluate controllers is al-
ready a subject of interest in fields with hard security
Initial parameter set Θ
0
Trajectory (η
d
(t
i
),
˙
η
d
(t
i
)) for i ∈ [0, N]
Disturbance models D
k
for k ∈ [1, N
d
]
Performance metrics M
m
for m ∈ [1, N
m
]
Run simulation with Θ
n
Compute performance metrics M
n
from
error sets and control effort
Compute performance cost function
Update optimizer
Update best parameter
set candidate Θ
∗
Compute parameter set Θ
n+1
Optimal parameter set
Θ
∗
selected
n = n + 1
End
Figure 1: Flow chart to the parameter optimization proce-
dure.
constraints, such as flight control (Heise et al., 2013;
Stepanyan et al., 2009). The procedure is indepen-
dent of the system model and controller algorithm,
and tries to guarantee that the system will present a
safe performance during its tasks. The establishment
of a clear method for controller design and evaluation
can also benefit the creation of safety and control de-
sign standards (Stepanyan et al., 2009).
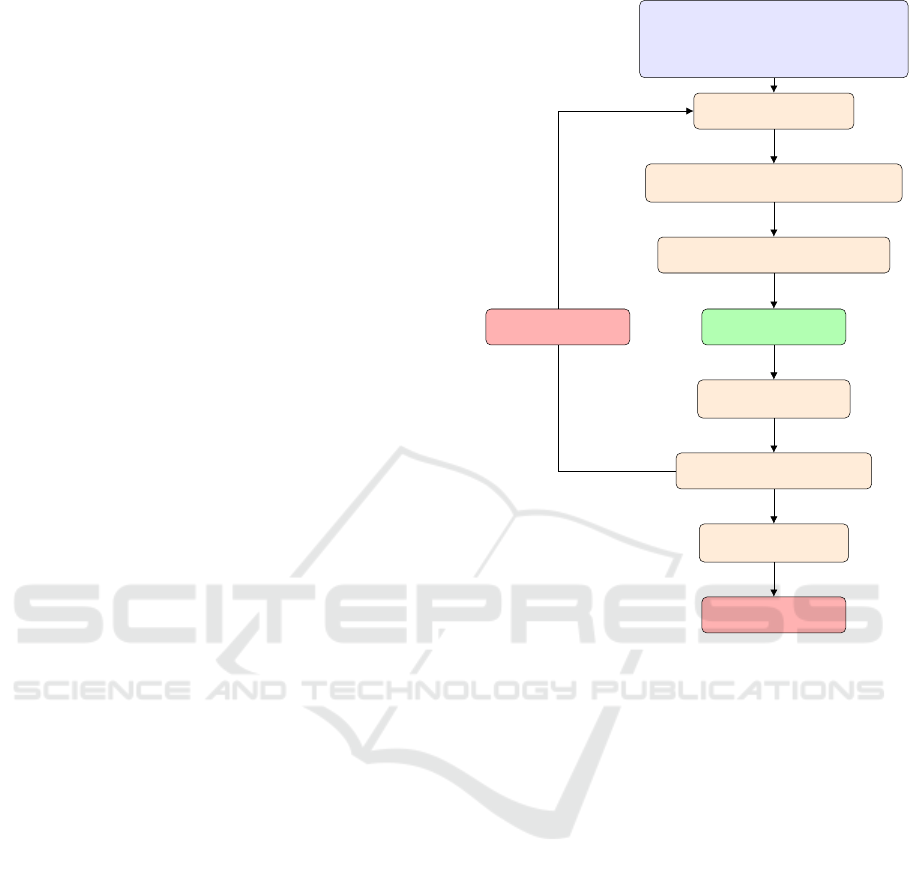
As shown in Figure 1, the procedure is very
straightforward. The parameter optimization is exe-
cuted for a specific scenario using pre-defined distur-
bances models D
k
. The disturbance models are cho-
sen in order to represent a worst case scenario for the
mission objective in order to allow the optimal param-
eter set to provide a good trajectory tracking perfor-
mance for a large range of unmodeled disturbances.
There is, however, the possibility of controller pa-
rameters converging to a local minima without ex-
ploring the parameter set or the resulting set will be
a result of overfitting the controller parameters to
the given simulated scenario. It was therefore de-
cided upon the use of the algorithm configuration tool
SMAC (Hutter et al., 2011). This global black-box al-
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
103

gorithm configuration method calculates the next pa-
rameter sets by fitting a random forest model to the
defined cost function output. Due to the use of ran-
dom forest models, the optimizer is less likely to get
stuck in local minima and is capable of exploring un-
seen regions of the parameter space (Hutter et al.,
2011).
2.1 Performance Cost Function
The performance of a controller applied to a scenario
is a very broad subject to tackle and highly dependent
on the application and/or mission. For this use-case,
the performance metrics used are focused on the po-
sition and orientation errors. Considering a trajectory
(η
d
(t
i
),
˙
η
d
(t
i
)) for i ∈ [0,N] and t
N
being the final time
stamp, set as reference for pose (η
d
) and velocity (
˙
η
d
)
to the controller, pose and velocity error vectors can
be computed after each simulated scenario with a con-
troller parameter set Θ
n
.
The cost function takes then into account a
weighted sum of root mean square errors for position
and orientation as shown in Equation 1:
C
n
=
N
m
∑
m=1
w
m
M
m
=w
1
s
1
N
N
∑
i=0
η
1
d
(t
i
) − η
1
(t
i
))
2
+ w
2
s
1
N
N
∑
i=0
(φ
d
(t
i
) − φ(t
i
))
2
+ w
3
s
1
N
N
∑
i=0
(θ
d
(t
i
) − θ(t
i
))
2
+ w
4
s
1
N
N
∑
i=0
(ψ
d
(t
i
) − ψ(t
i
))
2
(1)
being w
m
set as the inverse of the maximum accepted
value for the metrics in case, η
1
d
the reference posi-
tion vector (x
d
,y
d
,z
d
)
T
, and φ
d
, θ
d
and ψ
d
the orien-
tation reference in roll, pitch and yaw, respectively.
2.2 Disturbance Models
Two types of disturbance models are considered in
this paper. The first basic model is the application
of wrench vector defined on the WORLD frame to
the vehicle’s center of mass for a limited time range
[t
i
,t
f
]. The disturbance can be formally described in
Equation 2.
F =
(
(F
x
,F
y
,F
z
,τ
x
,τ
y
,τ
z
)
T
, for t
i
≤ t ≤ t
f
0 ∈ R
6
, otherwise
(2)
In a similar way, a constant current velocity V
c
also defined in the WORLD frame subject to the hor-
izontal angle θ
c
can also be scheduled to be added
to the simulation for a given time range in a similar
manner following the model in Eq. 3.
V
c
=
(
(V
c
cosθ
c
,V
c
sinθ
c
,0)
T
, for t
i
≤ t ≤ t
f
0 ∈ R
3
, otherwise
(3)
3 CONTROLLERS
In this study case, two model-free controllers were
subject to parameter optimization: a conventional
MIMO PID controller and a model-free sliding mode
controller. Both controllers were optimized in the
same scenario with the same disturbances to allow a
fair comparison later on.
3.1 MIMO PID Controller
Consider ξ and
˙
ξ to be, respectively, the pose and ve-
locity error vectors in R
6
with respect to the BODY-
frame, the PID controller’s control force output is de-
scribed by the following equation:
τ
PID
= K
P
ξ + K
D
˙
ξ + K
I
Z
t
0
ξ(τ)dτ (4)
where K
P
,K
D
,K
I
∈ R
6×6
are chosen to be positive
semi-definite diagonal matrices.
3.2 Model-free Sliding Mode Controller
The model-free sliding mode controller presented be-
low is based on the work of (Garc
´
ıa-Valdovinos et al.,
2014) but differs in two aspects from the original al-
gorithm, namely that the errors are represented in the
BODY-frame coordinates and, according to our con-
vention, errors are represented with the opposite sign.
Assume BODY-frame velocities and WORLD-
frame poses to be represented, respectively, as
ν = [ν
1
,ν
2
]
T
= [u,v, w, p,q,r]
T
and η = [η
1
,η
2
]
T
=
[x,y,z,φ,θ,ψ]
T
, where ν
1
∈ R
3
and ν
2
∈ R
3
are the
linear and angular velocity vectors with respect to the
BODY-frame, and η
1
∈ R
3
and η
2
∈ R
3
are position
and orientation vectors represented in the WORLD-
frame.
The equation of motion expressed in BODY-frame
(Fossen, 2011) is given as:
M
˙
ν + C(ν)ν + D(ν)ν + g(η) = τ
(5)
with M ∈ R
6×6
, C ∈ R
6×6
, D ∈ R
6×6
, g ∈ R
6
, and
τ ∈ R
6
representing respectively the inertia and added
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
104

mass matrix, the Coriolis and centripetal terms ac-
counting with added mass terms, the damping matrix,
the gravitational forces and the control inputs. The
transformation
˙
η = J(η)ν is used to convert linear and
angular velocity from BODY to WORLD frame, J(η)
being defined as in (Garcia-Valdovinos et al., 2009).
The left-hand side of Equation 5 can be linearly
parametrized, in terms of a nominal reference (ν
r
,
˙
ν
r
),
by the product of a regressor Y
r
(ν,η,ν
r
,
˙
ν
r
) ∈ R
6×p
(Lantos and M
´
arton, 2011), composed of known non-
linear terms, and a constant parameter vector Θ ∈ R
p
:
M
˙
ν
r
+ C(ν)ν
r
+ D(ν)ν
r
+ g(η) = Y
r
(ν,η,ν
r
,
˙
ν
r
)Θ
(6)
Subtracting (6) from (5) leads to the representa-
tion of Equation 5 in error coordinates (Parra-Vega
and Arimoto, 1995; Garc
´
ıa-Valdovinos et al., 2014):
M
˙
s
r
+ C(ν)s
r
+ D(ν)s
r
= τ − Y
r
(ν,η,ν
r
,
˙
ν
r
)Θ (7)
with the extended error s
r
= ν − ν
r
.
Defining a change of coordinates to the nominal
reference (Parra-Vega et al., 2003; Garc
´
ıa-Valdovinos
et al., 2014) leads to:
ν
r
= ν
d
+ αξ + s
d
− K
I
Z
t
0
sign(s
ν
)dσ (8)
where
s
d
= s(t
0
)e
−κt
(9)
s
ν
= s − s
d
(10)
with α and K
I
being diagonal positive definite 6 × 6
matrices, κ a positive scalar, sign(x) the input-wise
discontinuous signum function for the vector x, and
the sliding surface s defined as s = −
˙
ξ − αξ. s
d
is re-
sponsible for a smooth initialization of the controller
output and ν
d
is the velocity reference with respect to
the BODY frame. The extended error s
r
can be writ-
ten as:
s
r
= s
ν
+ K
I
Z
t
0
sign(s
ν
)dσ (11)
The control law τ
SM
= −K
D
s
r
, with K
D
as a diag-
onal positive 6 ×6 matrix, in closed-loop with system
presented in Equation 7 yields to:
M
˙
s
r
= − K
D
s
r
− C(ν)s
r
− D(ν)s
r
− Y
r
(ν,ν
r
,
˙
ν
r
,η)Θ.
(12)
To ensure the convergence of the system, let us
consider a Lyapunov candidate function defined as
follows, as given by (Garcia-Valdovinos et al., 2009):
V =
1
2
s
T
r
Ms
r
(13)
Its corresponding time derivative is:
˙
V =s
T
r
[−K
D
s
r
− C(ν)s
r
− D(ν)s
r
− Y
r
Θ]+
1
2
s
T
r
˙
Ms
r
(14)
Now, using the fact that x
T
[
˙
M−2C(ν)]x = 0, ∀x ∈
R
6
, x 6= 0, we have:
˙
V = −s
T
r
[K
D
+ D(ν)]s
r
− s
T
r
Y
r
Θ (15)
Since D(ν) is a positive definite matrix and Y
r
Θ
is upper bounded (Parra-Vega et al., 2003) by ρ(t):
˙
V = −s
T
r
[K
D
+ D(ν)]s
r
− s
T
r
Y
r
Θ
≤ −s
T
r
K
D
s
r
− s
T
r
Y
r
Θ
≤ −s
T
r
K
D
s
r
+
k
s
r
k
ρ(t)
(16)
Equation 16 allows to conclude that for suffi-
ciently large K
D
values and small initial error con-
ditions, the time derivative of the Lyapunov function
is negative semidefinite, implying converge of s
r
to a
set-bounded set ε, i.e. s
r
→ ε as t → ∞. Rewriting
Equation 12 as:
˙
s
r
= − M
−1
[K
D
s
r
+ C(ν)s
r
+ D(ν)s
r
+ Y
r
(ν,ν
r
,
˙
ν
r
,η)Θ]
(17)
and using the fact that all right-hand side terms of this
equation are upper bounded (Parra-Vega et al., 2003),
it follows that:
k
˙
s
r
k
≤ ε
1
(18)
Now, deriving Equation 11 and rearranging the
terms:
˙
s
ν
= −K
I
sign(s
ν
) +
˙
s
r
(19)
Multiplying Equation 19 by s
T
ν
:
s
T
ν
˙
s
ν
= −s
T
ν
K
I
sign(s
ν
) + s
T
ν
˙
s
r
≤ −λ
min
(K
I
)
s
T
ν
+
s
T
ν
|
˙
s
r
|
≤
s
T
ν
(−λ
min
(K
I
) + ε
1
)
≤ −µ
s
T
ν
(20)
λ
min
(K
I
) > ε
1
→ µ > 0, assuring sliding mode at
t
s
≤ (|s
ν
(t
0
)/µ|) and, since s
ν
(t
0
) = 0 for any initial
condition, sliding mode in s
ν
(t) = 0 is enforced for
all time.
From Equation 9, s
d
→ 0 exponentially, and from
Equation 10:
s
ν
= −
˙
ξ − αξ − s
d
⇒
˙
ξ = −αξ (21)
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
105
implying exponential convergence of the tracking er-
rors. The full control law after s
d
converges to zero
after initialization is shown in Equation 22.
τ
SM
= K
D
αξ + K
D
˙
ξ + K
D
K
I
Z
t
0
sign(
˙
ξ + αξ)dσ
(22)
4 SIMULATION SCENARIO
DESCRIPTION
The simulation was built and configured using
the UUV Simulator (Manh
˜
aes et al., 2016b), an
open-source underwater simulation package for the
robotics simulator Gazebo (Koenig and Howard,
2004) using ROS (”Robot Operating System”) as a
system application and communication framework.
The simulator is built in a modular fashion, which al-
lows an easy setup of the scenarios for different con-
troller algorithms. The information flow between the
modules is shown in Figure 3. A view of the 3D vi-
sualization tool during the simulation of the scenario
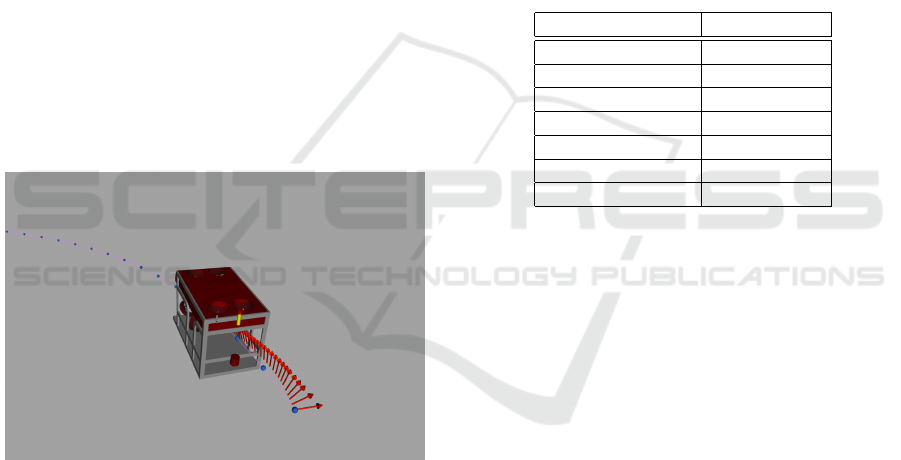
with the test trajectory is shown in Figure 2.
Figure 2: Snapshot from the RViz environment (ROS 3D vi-
sualization tool) for the first few seconds after the trajectory
following started. The red arrows show the heading for past
samples and the pink line represents the path to be followed.
4.1 Vehicle Model
The vehicle considered in this paper is a fully actu-
ated work-class ROV with parameters retrieved from
(Berg, 2012) based on the Sperre SF 30k ROV with
a slightly different thruster configuration and thruster
models. The vehicle’s dynamic model, visual and col-
lision geometries can be found as part of the UUV
Simulator package (Manh
˜
aes et al., 2016b).
The thruster units (see Figure 3) include a steady-
state curve described by τ
i
= 0.00031|Ω|Ω, where
Ω is the rotor’s angular velocity, and a first-order
dynamic model to represent the propeller dynamics
(Manh
˜
aes et al., 2016a). Ω
C
i
is the rotor command
velocity is obtained through the inverse of the steady-
state angular velocity to thrust function applied to the
desired thrust force τ
C
i
.
4.2 Trajectory and Disturbances
The pose and velocity reference were computed from
a helical trajectory. The WORLD frame follows in
this case the ENU (East-North-Up) convention since
it is the standard for the Gazebo simulator, and is
therefore the reference frame for the trajectory gener-
ated. The trajectory parameters are listed in Table 1.
Table 1: Reference trajectory parameterized with the con-
troller benchmark.
Parameter Value
Type of trajectory Helical
Radius 20 m
∆z 10 m
# of turns 2
Duration 200 s
Center point (0,0,−20) m
Start time 5 s
The disturbances are scheduled and generated by a
disturbance manager node using the models described
in Section 2.2 with respect to Gazebo’s WORLD
frame in the ENU convention. The disturbance model
description and their respective activation and deacti-
vation times can be seen in Table 2.
4.3 Controller Parameter Optimization
A fair comparison of the performance properties
of a PID and a model-free sliding mode con-
trol is proposed, where both controller parameters
are optimized using SMAC (Hutter et al., 2011),
a random-forest-based Bayesian optimization algo-
rithm. Bayesian optimization approaches are an ad-
equate choice when the cost function evaluations are
expensive to obtain (Brochu et al., 2010).
For both the controllers the SMAC task had to be
configured with the controller parameters, its ranges
and initial values, the cost function and the maximum
number of simulation runs. In both cases, the maxi-
mum number of simulation runs was set to 130. The
initial values for both controllers have been chosen to
deliver a stable closed-loop system.
For the MIMO PID controller presented in Section
3.1, the parameter matrices are defined in Equation
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
106
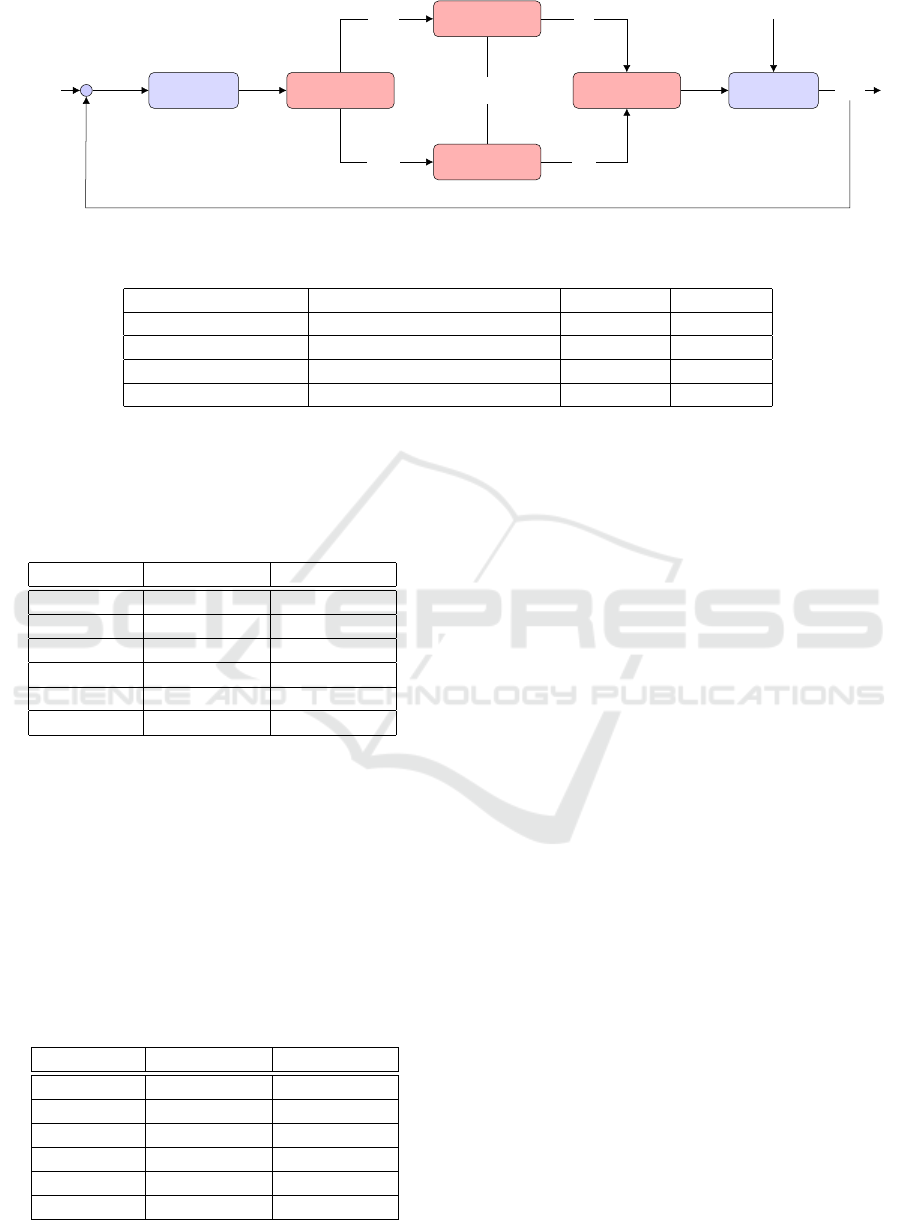
Controller
Thruster
manager
Thruster unit 0
Thruster unit N
Thruster
allocator
Vehicle
system
η
d
,
˙
η
d
ξ,
˙
ξ
τ
C
Ω
C
0
Ω
C
N
.
.
.
τ
0
τ
N
τ
Disturbances
η,
˙
η
−
Figure 3: Information flow using the simulation environment.
Table 2: Parameters for the disturbance models used in the optimization process.
Disturbance model Value Start time End time
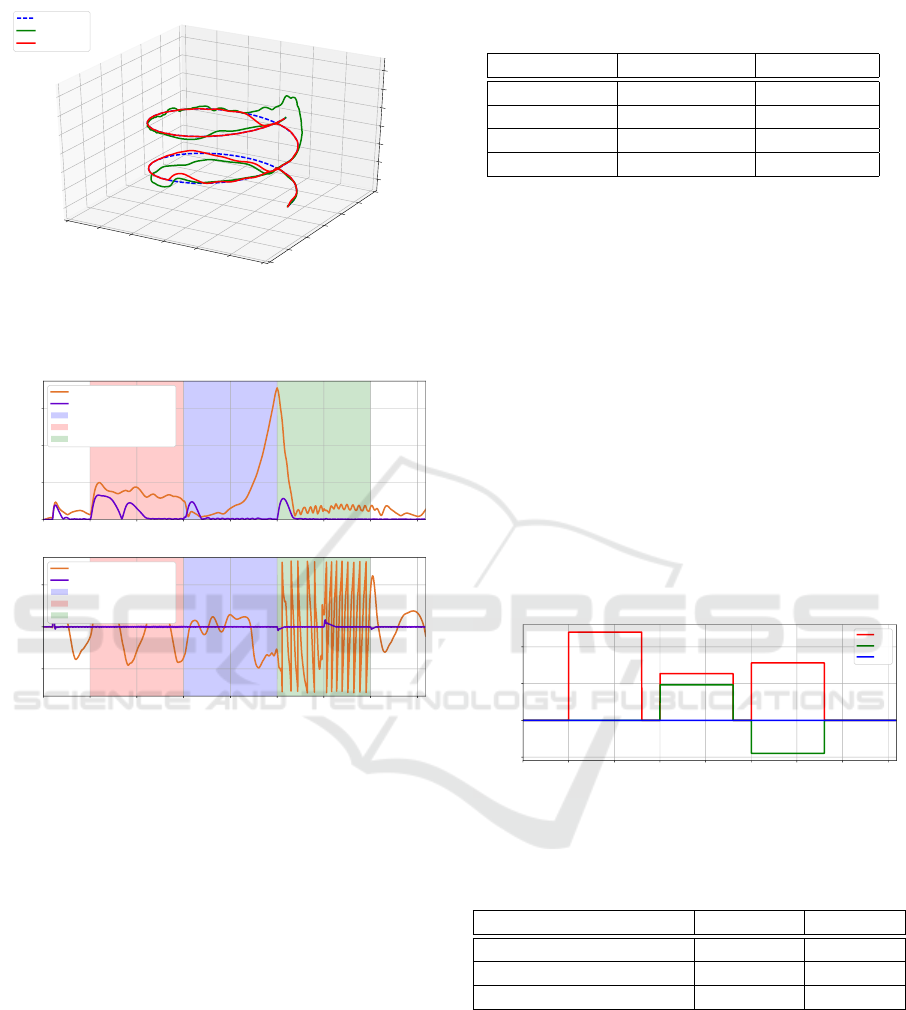
Wrench (3000 N,0,−3000 N,0,0,0) 25 s 75 s
Current (1.2,0,0) m/s 75 s 125 s
Wrench (0,0,0,0,0,3000 Nm) 125 s 150 s
Wrench (0,0,0,0,0,−3000 Nm) 150 s 175 s
23. The parameter search ranges and initial values are
listed in Table 3.
Table 3: Configuration parameters for the MIMO PID pa-
rameter optimization.
Parameter Range Initial value
K
P
lin
[100, 20000] 5000
K
P
ang
[100, 20000] 5000
K
I
lin
[0, 5000] 0
K
I
ang
[0, 5000] 0
K
D
lin
[0, 20000] 0
K
D
ang
[0, 20000] 0
K
P
= diag(K
P
lin
I
3×3
,K
P
ang
I
3×3
)
K
I
= diag(K
I
lin
I
3×3
,K
I
ang
I
3×3
)
K
D
= diag(K
D
lin
I
3×3
,K
D
ang
I
3×3
)
(23)
The model-free sliding mode controller described
in Section 3.2 has its matrices defined as shown in
Equation 24. The setup used for SMAC is listed in
Table 4.
Table 4: Configuration parameters for the model-free slid-
ing mode parameter optimization.
Parameter Range Initial value
K
D
lin
[100, 10000] 2000
K
D
ang
[100, 10000] 200
K
I
lin
[0, 10] 0.005
K
I
ang
[0, 10] 0.3
α
lin
[0.01, 5] 1.5
α
ang
[0.01, 5] 1.5
κ = 5
K
D
= diag(K
D
lin
I
3×3
,K
D
ang
I
3×3
)
K
I
= diag(K
I
lin
I
3×3
,K
I
ang
I
3×3
)
α = diag(α
I
lin
I
3×3
,α
I
ang
I
3×3
)
(24)
5 PARAMETRIZATION RESULTS
For the parametrization process, a task scheduler was
used to start all needed processes at each optimizer
iteration with the new set of parameters and process
the simulated data for the computation of the perfor-
mance metrics needed in the cost function described
in Section 2.1. The vehicle starts at the position
(x,y,z) = (20,0,−20) m in the ENU frame of the
Gazebo simulator world and with initial orientation
set as (φ,θ,ψ) = (0,0, 0) rad, with a initial heading
error of π/2 rad with respect to the initial trajectory
reference heading.
SMAC does not have a stopping criteria, it will
therefore search for the best parameter set until the
maximum number of simulation runs is reached, stor-
ing partial results during the process.
The weights of the cost function depicted in Sec-
tion 2.1 was set as w
i
= 1/RMSE
i
MAX
, RMSE
i
MAX
be-
ing an stipulated maximum acceptable value for the
corresponding metric. The weight values used in
the cost function according to the nomenclature used
in Section 2.1 are w
1
= 1/5 m
-1
, w
2
= 10/π rad
-1
,
w
3
= 10/π rad
-1
and w
4
= 6/π rad
-1
.
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
107
5.1 MIMO PID Controller
Parametrization
The optimal controller parameters were found with a
corresponding cost function derived from SMAC’s fit-
ted model of C
∗
PID
= 0.66059 after 28 evaluations, 1.8
hours after the optimizer was started (see Figure 4).
The controller parameters found are listed in Table 5.
Table 5: Optimal parameters for the MIMO PID controller
after optimization with SMAC.
Parameter Optimal values
K
P
lin
11993.888
K
P
ang
19460.069
K
I
lin
321.417
K
I
ang
2096.951
K
D
lin
9077.459
K
D
ang
18880.925
0 5 10 15 20 25
Number of evaluations
1.0
1.5
2.0
2.5
Cost function
Figure 4: Evolution of performance cost function for the
MIMO PID controller.
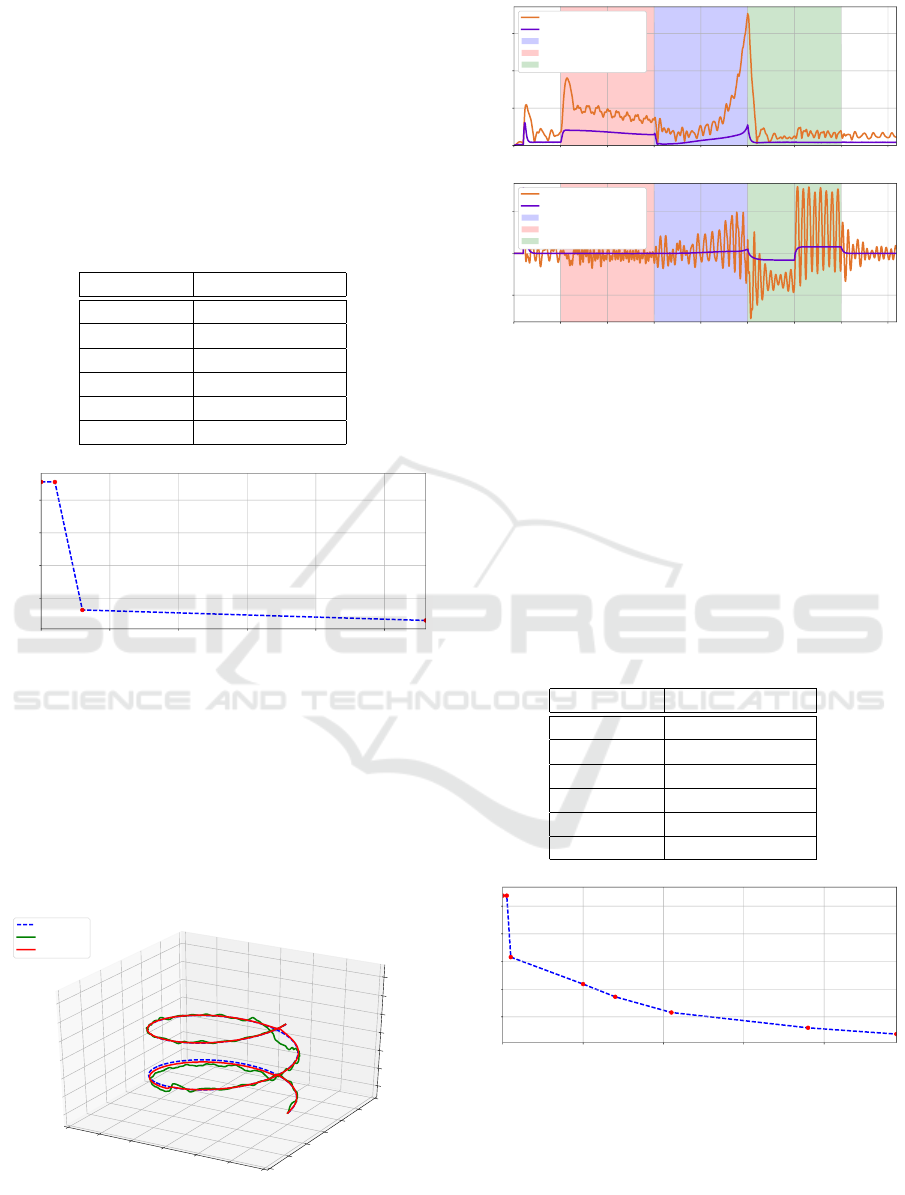
In Figure 5, the paths generated with the initial
and optimal parameter sets are compared against the
reference path. It illustrates the improvement of the
vehicle during its trajectory tracking task even in the
presence of disturbances. The position and heading
error curves for initial and optimal parameter sets are
shown in Figure 6.
X [m]
−30
−20
−10
0
10
20
30
Y [m]
−30
−20
−10
0
10
20
30
Z [m]
−20
−18
−16
−14
−12
−10
−8
Desired path
Initial set
Optimal set
Figure 5: Comparison between desired and actual trajecto-
ries for the initial and optimal parameter sets for the MIMO
PID controller under the influence of disturbances.
0 25 50 75 100 125 150 175 200
Time [s]
0
1
2
3
Position error [m]
Initial set
Optimal set
Current disturbance activated
Force disturbance activated
Torque disturbance activated
0 25 50 75 100 125 150 175 200
Time [s]
−1
0
1
Heading error [rad]
Initial set
Optimal set
Current disturbance activated
Force disturbance activated
Torque disturbance activated
Figure 6: Error curves for the best parameter set for the
MIMO PID controller.
5.2 Model-free Sliding Mode Controller
Parametrization
The optimal controller parameters were found with a
corresponding cost function being C
∗
SM
= 0.378156
after 98 evaluations, 6.52 hours after the optimizer
was started (see Figure 7). The controller parameters
found are listed in Table 6.
Table 6: Optimal parameters for the model-free sliding
mode controller after optimization with SMAC.
Parameter Optimal values
K
D
lin
3243.315
K
D
ang
5602.003
K
I
lin
0.134
K
I
ang
0.169
α
lin
0.733
α
ang
4.833
0 20 40 60 80
Number of evaluations
1
2
3
4
5
Cost function
Figure 7: Evolution of the performance cost function for the
model-free sliding mode controller.
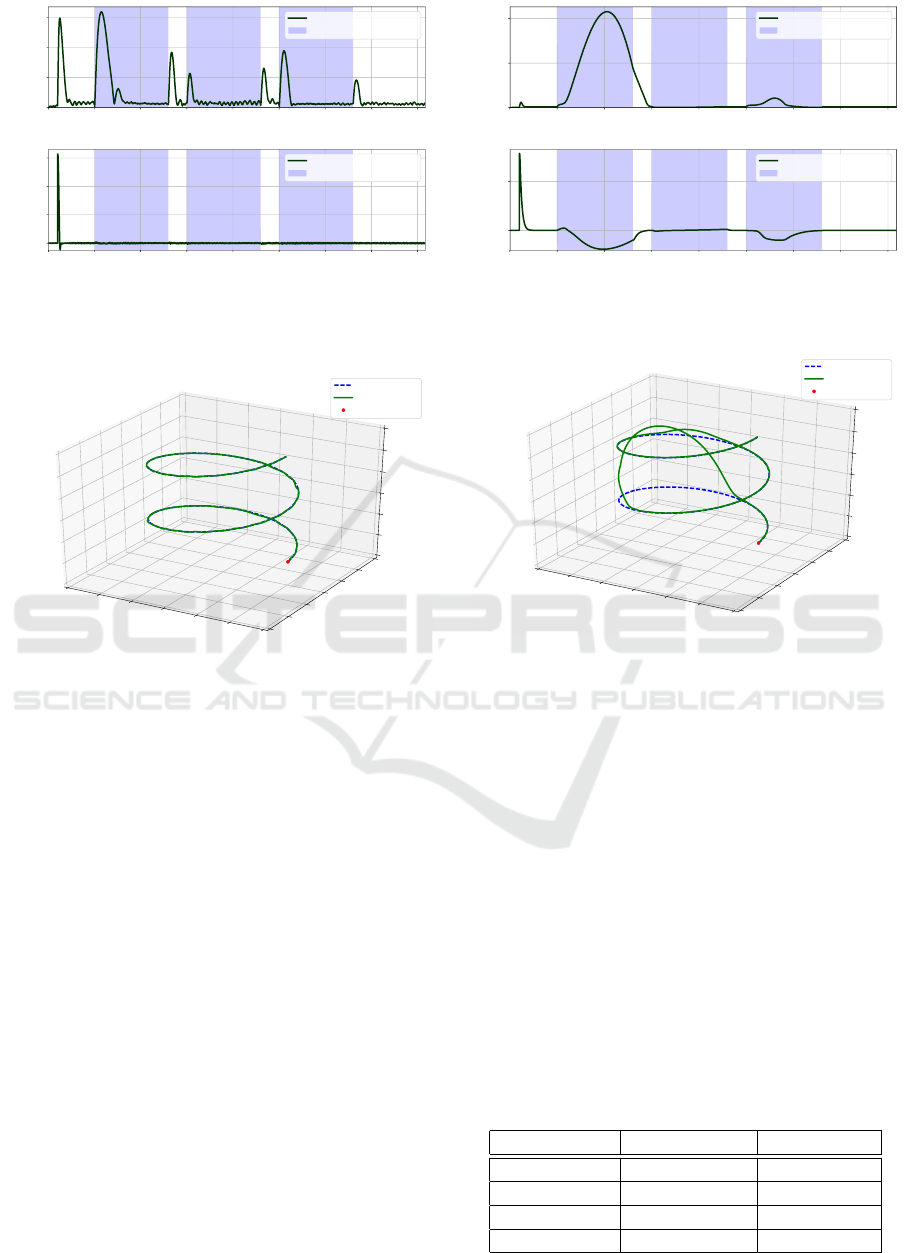
In Figure 8, the paths generated with the initial
and optimal parameter sets are compared with the ref-
erence path. The position and heading errors for both
the optimal and initial controller parameter sets can
be seen in Figure 9.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
108
X [m]
−30
−20
−10
0
10
20
30
Y [m]
−30
−20
−10
0
10
20
30
Z [m]
−20
−18
−16
−14
−12
−10
−8
Desired path
Initial set
Optimal set
Figure 8: Comparison between desired and actual paths for
the initial and optimal parameter sets for the model-free
sliding mode controller under the influence of disturbances.
0 25 50 75 100 125 150 175 200
Time [s]
0
2
4
6
Position error [m]
Initial set
Optimal set
Current disturbance activated
Force disturbance activated
Torque disturbance activated
0 25 50 75 100 125 150 175 200
Time [s]
−2
0
2
Heading error [rad]
Initial set
Optimal set
Current disturbance activated
Force disturbance activated
Torque disturbance activated
Figure 9: Position error for the best and initial parameter set
for the model-free sliding mode controller under the influ-
ence of disturbances.
5.3 Comparison of the Resulting
Optimized Controller Performances
Upon running both resulting parameter sets in the
simulated scenario, the performance metrics used for
the computation of the cost function (see Section 2.1)
for each use-case using the optimized controller pa-
rameters are presented in Table 7. The cost func-
tion computed from using the data Table 7 may differ
slightly from the SMAC’s output presented in Sec-
tions 5.1 and 5.2 since they were computed from its
calculated model.
Upon analysis of the generated paths and perfor-
mance metrics, both controllers achieve good results
both for position and heading tracking in the presence
of disturbances, with the PID controller test show-
ing a better position tracking performance and lower
maximum position error (see Figures 6 and 9). It is,
Table 7: Comparison of performance metrics after simula-
tion runs using the optimized controller parameters.
Metric Sliding Mode MIMO PID
RMSE
η
1
[m] 0.411 0.212
RMSE
φ
[rad] 0.009 0.014
RMSE
θ
[rad] 0.306 0.16
RMSE
ψ
[rad] 0.089 0.122
however, important to note that the sliding mode con-
troller is inherently robust and can show better results
when subjected to different and/or unknown uncer-
tainties. This aspect will be addressed on the next
section.
6 PERFORMANCE
COMPARISON WITH A
CHANGING CURRENT
DISTURBANCE MODEL
As a next analysis, both controllers are put again to
the task of tracking a helical trajectory under a dif-
ferent setup of current disturbances (see Figure 10) to
test their robustness to a different scenario.
0 25 50 75 100 125 150 175 200
Time [s]
−0.5
0.0
0.5
1.0
Velocity [m/s]
u
C
v
C
w
C
Figure 10: New setup of current velocity disturbances.
Table 8: Parameters for the new current disturbance models
used in the validation process.
Current velocity vector Start time End time
(1.2,0,0) m/s 25 s 65 s
(0.67,0.48,0) m/s 75 s 115 s
(0.78,−0.45,0) m/s 125 s 165 s
The sliding mode controller shows, for the new
disturbance set, very similar maximum position errors
to those presented on the optimized scenario (see Fig-
ures 11 and 12).
The MIMO PID controller, however, offers a poor
tracking error performance, particularly during the
occurance of the first current disturbance (see Fig-
ures 13 and 14).
As stated in Section 5.3, the sliding mode con-
troller has indeed shown better behavior under the
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
109
0 25 50 75 100 125 150 175 200
Time [s]
0.00
0.25
0.50
0.75
Position error [m]
Position error
Current disturbance activated
0 25 50 75 100 125 150 175 200
Time [s]
0.0
0.5
1.0
1.5
Heading error [rad]
Heading error
Current disturbance activated
Figure 11: Position and heading error for the model-free
sliding mode controller with the new current disturbance
model.
X [m]
−30
−20
−10
0
10
20
30
Y [m]
−30
−20
−10
0
10
20
30
Z [m]
−22
−20
−18
−16
−14
−12
−10
Desired path
Actual path
Starting position
Figure 12: Desired and actual paths generated in the simula-
tion scenario using the optimized model-free sliding mode
controller with the new current disturbance model.
new set of disturbances in comparison to the PID con-
troller. The performance metrics for this new scenar-
ios are presented in Table 9 and show that the sim-
ulation using the PID controller lead to an RMSE
η
1
almost 20 times higher and a maximum position error
10 times higher than the sliding mode controller.
In an additional example, the same set of dis-
turbances listed in Table 8 was used and the path
was generated through linear interpolation with poly-
nomial blends of set of waypoints with the vehi-
cle’s maximum forward speed set to 0.5 m/s (see
Figure 15). The initial position and orientation
of the vehicle were set in both simulation runs as
η
1
= (20,0,−20)
T
m and η
2
= (0,0,π)
T
rad with
respect to Gazebo’s WORLD frame, respectively.This
scenario requires the vehicle to change depth and
heading several times at designated points instead of
the constant heading and depth rate provided by the
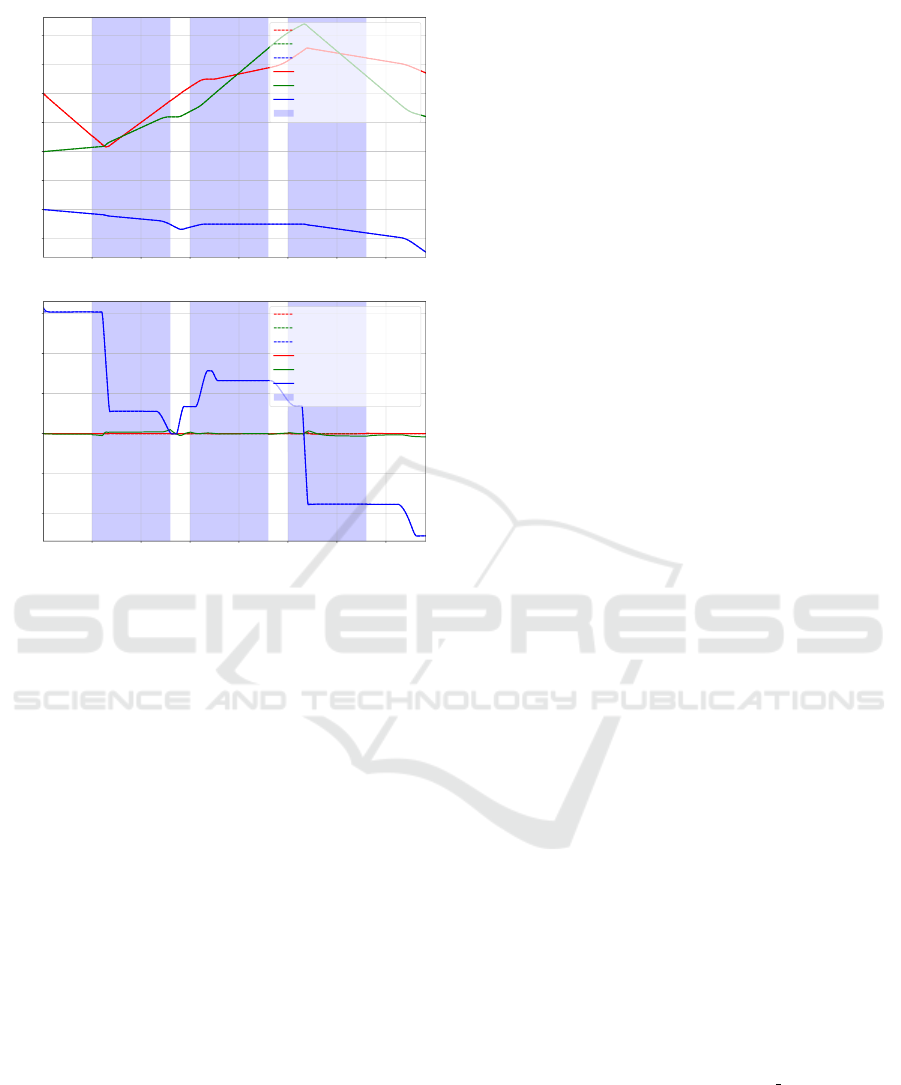
helical trajectory. The resulting reference and actual
trajectories for the sliding mode and the PID con-
troller can be seen in Figures 16 and 17, respectively.
As it can be observed from the two cases, in this
0 25 50 75 100 125 150 175 200
Time [s]
0
5
10
Position error [m]
Position error
Current disturbance activated
0 25 50 75 100 125 150 175 200
Time [s]
0
1
Heading error [rad]
Heading error
Current disturbance activated
Figure 13: Position and heading error for the PID controller
with the new current disturbance model.
X [m]
−30
−20
−10
0
10
20
30
Y [m]
−30
−20
−10
0
10
20
30
Z [m]
−22
−20
−18
−16
−14
−12
−10
Desired path
Actual path
Starting position
Figure 14: Desired and actual paths generated in the simu-
lation scenario using the optimized PID controller with the
new current disturbance model.
scenario of waypoint following, both optimized con-
troller seem fit to be used with for the task regarding
the trajectory tracking result. As it can be seen in Ta-
ble 10, the PID controller showed overall better met-
rics for the trajectory following aspect even subjected
to the same disturbances.
It can then be concluded that using the sliding
mode controller will lead to a robust system behav-
ior for unmodeled disturbances with a good trajec-
tory tracking performance guaranteed by the opti-
mization step via the consideration of tracking per-
formance metrics in the cost function. However, the
optimized PID controller can also provide a good tra-
jectory tracking performance with the knowledge that
Table 9: Comparison of performance metrics using the new
disturbance setup.
Metric Sliding Mode MIMO PID
RMSE
η
1
[m] 0.177 3.415
RMSE
φ
[rad] 0.007 0.157
RMSE
θ
[rad] 0.117 0.565
RMSE
ψ
[rad] 0.083 0.164
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
110
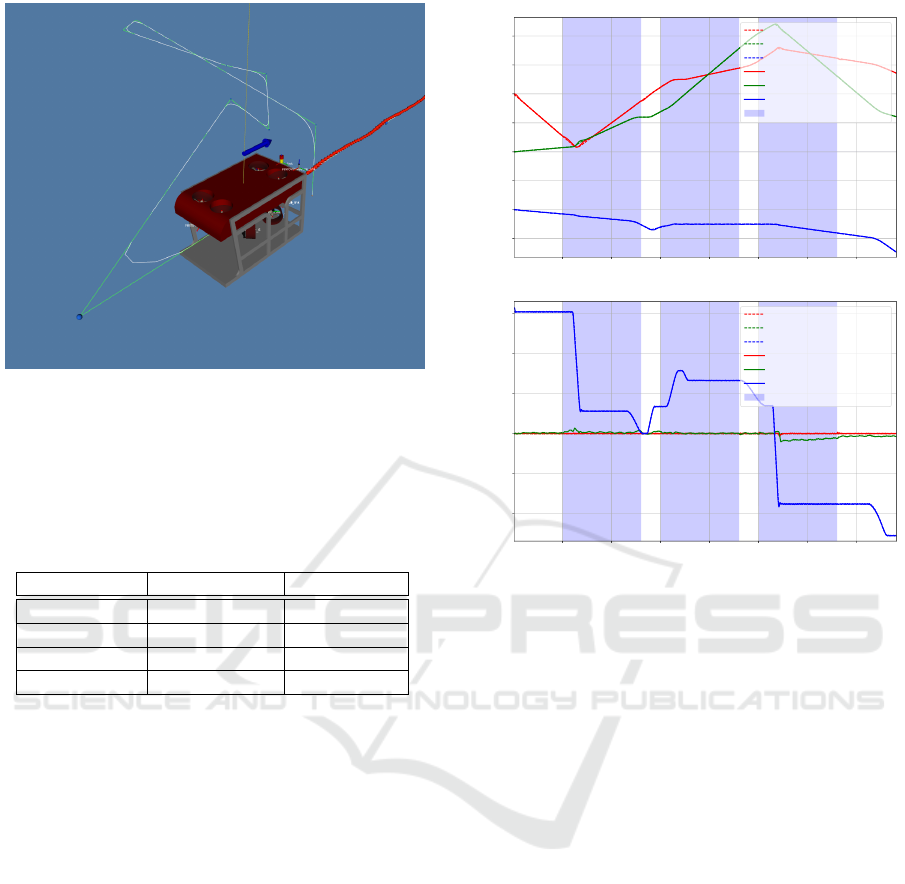
Figure 15: View of the RViz display during the waypoint
following scenario. The green path shows the lines con-
necting the waypoint sequence, the white path represents
the result of the path interpolation with polynomial blends,
the blue arrow shows the direction of the current velocity
vector and the blue spheres represent the waypoints.
Table 10: Comparison of performance metrics using the
new disturbance setup for the waypoint following scenario.
Metric Sliding Mode MIMO PID
RMSE
η
1
[m] 0.154 0.059
RMSE
φ
[rad] 0.007 0.005
RMSE
θ
[rad] 0.069 0.036
RMSE
ψ
[rad] 0.010 0.006
it might lead to high deviations or unstable results un-
der certain environmental conditions and unmodeled
model uncertainties considering that it is not inher-
ently robust. The optimization of these control strate-
gies using scenarios where the disturbances models
tend to reproduce worst-case examples of possible
perturbations that could occur will help to gain cer-
tainty on the capability of the control algorithm to be
deployed with a specific vehicle before going to field
tests with the real system. More extensive tests, such
as sensitivity analysis against a range of disturbances,
can also be employed to gain more information on the
safe operational limits of the closed-loop system and
will be a subject of future research.
7 CONCLUSIONS
This paper explores the advantages of a methodical
simulation-based controller setup based on its perfor-
mance evaluation. The optimization takes into ac-
count a weighted sum of performance metrics from
the simulated scenario and can be setup to also con-
25 50 75 100 125 150 175
Time [s]
−30
−20
−10
0
10
20
30
40
Position [m]
Position
X
d
Y
d
Z
d
X
Y
Z
Current disturbance activated
25 50 75 100 125 150 175
Time [s]
−2
−1
0
1
2
3
Angles [rad]
Orientation
φ
d
θ
d
ψ
d
φ
θ
ψ
Current disturbance activated
Figure 16: Reference and actual trajectories using the inter-
polated waypoint set for the model-free sliding mode con-
troller.
sider possible disturbances that could occur during the
mission. The performance analysis can also be further
extended, e.g. considering the control efforts and ve-
locity errors.
This framework is facilitated by the modular
structure of the simulation environment used based on
ROS and Gazebo. Its structure allows the combina-
tion of different vehicles, controller, trajectory gener-
ators and disturbance models, that combined with a
task scheduler can be easily initialized with the dif-
ferent configuration parameters by, in this case, by
an optimization process, allowing a high level of au-
tomation of the parameter search method.
After the optimal setup of the two controllers in
the use case presented, a numerical comparison be-
tween their performances can be fairly evaluated un-
der the same conditions, an aspect that can highly
benefit the mission planning phases. This framework
will be further developed to consider model-based
controllers and a benchmarking procedure to be used
on the mission planning for different vehicles and sce-
narios, also focusing on energy consumption and mis-
sion time along with other sources of perturbation,
such as thruster failure and model mismatch, and ex-
tending the validation process to the real underwater
vehicle.
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
111
25 50 75 100 125 150 175
Time [s]
−30
−20
−10
0
10
20
30
40
Position [m]
Position
X
d
Y
d
Z
d
X
Y
Z
Current disturbance activated
25 50 75 100 125 150 175
Time [s]
−2
−1
0
1
2
3
Angles [rad]
Orientation
φ
d
θ
d
ψ
d
φ
θ
ψ
Current disturbance activated
Figure 17: Comparison of results for the trajectory tracking
from an interpolated waypoint set for the sliding mode and
PID controllers.
ACKNOWLEDGEMENTS
The work in this paper has been developed as part
of the work undertaken for the EU-funded SWARMs
(Smart and Networking Underwater Robots in Co-
operation Meshes) research project (ECSEL project
number 662107).
REFERENCES
Antonelli, G. (2014). Underwater Robots. Springer Inter-
national Publishing.
Berg, V. (2012). Development and commissioning of a DP
system for ROV SF 30k. Master’s thesis, Institutt for
marin teknikk, NTNU.
Berkenkamp, F., Schoellig, A. P., and Krause, A. (2016).
Safe controller optimization for quadrotors with gaus-
sian processes. In 2016 IEEE International Confer-
ence on Robotics and Automation (ICRA). Institute of
Electrical and Electronics Engineers (IEEE).
Brochu, E., Cora, V. M., and de Freitas, N. (2010). A tuto-
rial on Bayesian optimization of expensive cost func-
tions, with application to active user modeling and hi-
erarchical reinforcement learning. Technical report,
arXiv.org.
Calandra, R., Gopalan, N., Seyfarth, A., Peters, J., and
Deisenroth, M. P. (2014). Bayesian gait optimization
for bipedal locomotion. In Lecture Notes in Computer
Science, pages 274–290. Springer Nature.
Fossen, T. I. (2011). Handbook of Marine Craft Hydrody-
namics and Motion Control. Wiley-Blackwell.
Garc
´
ıa-Valdovinos, L. G., Salgado-Jim
´
enez, T., Bandala-
S
´
anchez, M., Nava-Balanzar, L., Hern
´
andez-
Alvarado, R., and Cruz-Ledesma, J. A. (2014).
Modelling, design and robust control of a remotely
operated underwater vehicle. International Journal of
Advanced Robotic Systems, 11(1):1.
Garcia-Valdovinos, L. G., Salgado-Jimenez, T., and Torres-
Rodriguez, H. (2009). Model-free high order sliding
mode control for ROV: Station-keeping approach. In
OCEANS 2009, MTS/IEEE Biloxi-Marine Technology
for Our Future: Global and Local Challenges, pages
1–7. IEEE.
Heise, C. D., Leitao, M., and Holzapfel, F. (2013). Perfor-
mance and robustness metrics for adaptive flight con-
trol - available approaches. In AIAA Guidance, Navi-
gation, and Control (GNC) Conference. American In-
stitute of Aeronautics and Astronautics (AIAA).
Hosseini, M. and Seyedtabaii, S. (2016). Robust ROV path
following considering disturbance and measurement
error using data fusion. Applied Ocean Research,
54:67–72.
Hutter, F., Hoos, H. H., and Leyton-Brown, K. (2011). Se-
quential model-based optimization for general algo-
rithm configuration. In Lecture Notes in Computer
Science, pages 507–523. Springer Nature.
Khadhraoui, A., Beji, L., Otmane, S., and Abichou, A.
(2014). Observer-based controller design for remotely
operated vehicle ROV. In Proceedings of the 11th In-
ternational Conference on Informatics in Control, Au-
tomation and Robotics. Scitepress.
Koenig, N. and Howard, A. (2004). Design and use
paradigms for Gazebo, an open-source multi-robot
simulator. In 2004 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS) (IEEE
Cat. No.04CH37566). Institute of Electrical and Elec-
tronics Engineers (IEEE).
Lantos, B. and M
´
arton, L. (2011). Nonlinear Control of
Vehicles and Robots. Springer London.
Lindauer, M., Eggensperger, K., Feurer, M., Falkner,
S., Biedenkapp, A., and Hutter, F. (2017).
SMAC v3: Algorithm Configuration in Python.
https://github.com/automl/SMAC3.
Manh
˜
aes, M. M. M., Scherer, S. A., and Douat,
L. R. (2016a). Unmanned Underwater Ve-
hicle (UUV) Simulation Package for Gazebo.
https://github.com/uuvsimulator/uuv simulator.
Manh
˜
aes, M. M. M., Scherer, S. A., Voss, M., Douat,
L. R., and Rauschenbach, T. (2016b). UUV simu-
lator: A Gazebo-based package for underwater inter-
vention and multi-robot simulation. In OCEANS 2016
MTS/IEEE Monterey. Institute of Electrical and Elec-
tronics Engineers (IEEE).
Molero, A., Dunia, R., Cappelletto, J., and Fernandez, G.
(2011). Model predictive control of remotely operated
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
112

underwater vehicles. In IEEE Conference on Decision
and Control and European Control Conference. Insti-
tute of Electrical and Electronics Engineers (IEEE).
Parra-Vega, V. and Arimoto, S. (1995). Adaptive control for
robot manipulators with sliding mode error coordinate
system: free and constrained motions. In Proceedings
of 1995 IEEE International Conference on Robotics
and Automation. Institute of Electrical and Electronics
Engineers (IEEE).
Parra-Vega, V., Arimoto, S., Liu, Y.-H., Hirzinger, G., and
Akella, P. (2003). Dynamic sliding PID control for
tracking of robot manipulators: theory and experi-
ments. IEEE Transactions on Robotics and Automa-
tion, 19(6):967–976.
Soylu, S., Proctor, A. A., Podhorodeski, R. P., Bradley, C.,
and Buckham, B. J. (2016). Precise trajectory con-
trol for an inspection class ROV. Ocean Engineering,
111:508–523.
Stepanyan, V., Krishnakumar, K., Nguyen, N., and Eykeren,
L. V. (2009). Stability and performance metrics for
adaptive flight control. In AIAA Guidance, Naviga-
tion, and Control Conference. American Institute of
Aeronautics and Astronautics (AIAA).
Zhu, K. and Gu, L. (2011). A MIMO nonlinear robust con-
troller for work-class ROVs positioning and trajectory
tracking control. In 2011 Chinese Control and Deci-
sion Conference (CCDC). Institute of Electrical and
Electronics Engineers (IEEE).
Framework for Fair Comparisons of Underwater Vehicle Controllers - Showcasing the Robustness Properties of a Model-free Sliding Mode
Controller Tuned with a Random-forest-based Bayesian Optimization Approach
113
