
A Blended Sliding Mode Control with Linear Quadratic Integral Control
based on Reduced Order Model for a VTOL System
Marco Herrera
1
, Paulo Leica
1
, Danilo Chavez
1
and Oscar Camacho
1,2
1
Departamento de Automatizaci
´
on y Control Industrial, Escuela Polit
´
ecnica Nacional,
Ladr
´
on de Guevara E11-253, Quito, Ecuador
2
Facultad de Ingenier
´
ıa, Universidad de los Andes, M
´
erida, Venezuela
Keywords:
Sliding Mode Control, LQI, Reduced Order Model, ISE Index, VTOL System.
Abstract:
In this paper, a Sliding Mode Control with chattering reduction based on reduced order model using Linear
Quadratic Integral Control as sliding surface, is implemented to One Degree of Freedom Vertical Take-Off
Landing System (VTOL). The controller performance is measured using Integral of the Square Error index
by simulation and real tests. Finally, the Sliding Mode Control with a Linear Quadratic Integral Control as
sliding surface performance for reference tracking and, robustness against VTOL system physical parameter
uncertainties and external disturbances are verified by experimental results.
1 INTRODUCTION
The Sliding Mode Control (SMC) is a robust con-
troller that deals with high-order nonlinearities, which
has been extensively studied due to its ability to re-
ject disturbances (Han et al., 2016; Nawawi et al.,
2011), and low sensitivity to uncertainties in the pa-
rameters (Prusty et al., 2016), thus it eliminates the
necessity of an accurate model of the system (Sa-
banovic et al., 2004). An LQI controller is a Linear-
Quadratic Regulator (LQR) with integral action. The
LQI advantages are: simple implementation (Carri
`
ere
et al., 2008), best possible performance according to
the minimization of an index, with a compromise be-
tween the response of the variables and the control
effort that guarantees the stability of the system (Mo-
hammadbagheri et al., 2011).
In order to achieve a robust control system with
the best performance, the advantages of the SMC and
LQI controllers can be blended in an robust-optimal
controller. In (Dong et al., 2011), an optimal slid-
ing mode control for nonlinear systems with uncer-
tainties is designed, where system stability is ensured
by minimizing a performance index. In (Teimoori
et al., 2012), an optimal sliding surface with respect a
quadratic performance index is selected for a system
where the parameters uncertainties are considered. In
(Chithra and Koshy, 2016), an integral action LQR is
combined with a robust SMC for a Twin MIMO Ro-
tor system, which is evaluated and compared with PID
and LQI controllers using simulations.
In (Zhang et al., 2014a), the combination of a
method to decouple the dynamics of the VTOL air-
craft system and a SMC is presented. The perfor-
mance of the designed controller and the tracking pro-
cess are shown with simulation results. In (Mondal
and Mahanta, 2013), a second order sliding mode
is presented and a sliding surface is designed by an
adaptive gain tuning mechanism for stabilizing a sin-
gle degree of freedom VTOL system.
In this article a robust-optimal controller based
on Sliding Mode Control with integral action (SMC-
LQI) is designed and implemented on VTOL system.
The sliding surface with an optimal criterion by mini-
mizing of a performance index is chosen. The design
of the controller is based on a reduced order model of
the VTOL system, which allows that implementation
in the real system to be simple. This paper is orga-
nized as follows. In Section I, a simplified dynamic
model of One Degree of Freedom (1-DOF) VTOL
is described. Section II, a SMC controller with re-
duction of the chattering effect is designed, where the
sliding surface is chosen via LQI controller approach.
In Section III, the performance of the controller is ver-
ified by the simulation results. In Section IV, the im-
plementation of the proposed controller on the real
platform for experimental tests are shown. Finally the
conclusions are presented in Section V.
606
Herrera, M., Leica, P., Chávez, D. and Camacho, O.
A Blended Sliding Mode Control with Linear Quadratic Integral Control based on Reduced Order Model for a VTOL System.
DOI: 10.5220/0006429606060612
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 606-612
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 SYSTEM DESCRIPTION AND
MODEL
The Laboratory set-up QNET VTOL trainer with 1-
DOF is shown in Fig.1. The system is composed of
a variable speed fan (a) mounted on an arm and an
adjustable counterweight (c) in other arm’s end. The
arm pivots around the rotary encoder (b) shaft, that
way the VTOL pitch angle position can be adquired.
The VTOL system is compatible with the LabVIEW
software using NI-Elvis board (d).
Figure 1: Vertical Take-off landing VTOL system.
In order to reduce the complexity of system, the
VTOL can be considered as two subsystems: the mo-
tor dynamics of fan and the pitch angle θ dynamics of
the VTOL body. Separating into subsystems allows to
design two controller loops as it is shown in the Fig.2.
Figure 2: Scheme of two control loops for the VTOL sys-
tem. (QUANSER, 2011).
The transfer function of motor dynamics is de-
scribed by:
I
m
(s) =
V
m
(s)
R
m
+ L
m
s
(1)
where V
m
(s) is the input voltaje of motor and,
I
m
(s) is the output current of motor. The PI con-
troller is used as an inner control loop, which regu-
lates the current of motor around a current reference
I
re f
. The PI controller simplifies the outer-loop con-
trol (QUANSER, 2011).
The pitch angle motion of the VTOL system with
respect to current is given by (QUANSER, 2011)
J
¨
θ + B
˙
θ + Kθ = k
t
I
m
(2)
Taking the laplace transform, the transfer fuction
is obtained:
P(s) =
θ(s)
I
m
(s)
=
k
t
Js
2
+ Bs + K
(3)
Where the VTOL system is a second order sys-
tem and based on this an outer controller is designed.
In table 1 the QNET VTOL trainer and PI controler
parameteres are shown.
The state-space representation of a linear
invariant-time system is given by:
(
˙x(t) = Ax(t)+ Bu(t)
y(t) = Cx(t)
(4)
By choosing the state variable as x =
θ
˙
θ
T
=
[x
1
x
2
]
T
, the system inpunt is u = I
m
and ouput
y = θ. The state-space matrix representation of VTOL
body dynamic model can be described as:
˙x(t) =
0 1
−
K
J
−
B
J
x(t) +
0
k
t
J
u(t)
y(t) =
h
1 0
i
x(t)
(5)
Analyzing the system described in (5), the states
matrices (A,B) are controllable and, the pair (A,C) are
observable. In addition the matriz A is nonsingular
therefore, the system eigenvalues are different to zero.
3 CONTROLLER DESIGN
In this section, a SMC with reduction of chattering
effect using a LQI control approach as sliding surface
is proposed.
3.1 LQI Controller
In order to reduce the steady-state error for a desired
reference, integral of the error ε is added to the state
feedback control as is illustrated in Fig. 3.
Where K
r
=
k
1
k
2
is the state-feedback control
gains vector, k
i
is the integral error constant and, the
error is given by:
Table 1: VTOL and PI Parameters (QUANSER, 2011).
Description Parameter Unit
Torque constant k
t
= 0.0108 Nm/A
Moment of equivalent inertia
along pitch axis J = 0.00347 kgm
2
Viscous Friction Constant B = 0.002 Nms/rad
Stiffness K = 0.0373 Nm/rad
DC Motor Resistance R
m
= 3 Ω
DC Motor Inductance L
m
= 0.0583 H
Proporcional Constant PI K
P
= 0.25
Integral Constant PI K
I
= 100
A Blended Sliding Mode Control with Linear Quadratic Integral Control based on Reduced Order Model for a VTOL System
607

Figure 3: Feedback state control with integrator.
e(t) = re f −Cx(t) (6)
furthermore, the error can be replaced by
e(t) =
˙
ε(t) (7)
Introducing ε as new state, the system (4) and
combinig with (7) an extended system can be written
as :
˙x
˙
ε
=
A 0
−C 0
x
ε
+
B
0
u +
0
re f
(8)
The LQR method is used to design an optimal lin-
ear state-feeback control. The objetive is to minimize
the quadratic cost function:
J =
Z
∞
0
x
T
(t)Qx(t) + u
T
(t)Ru(t)dt
(9)
where Q ≥ 0 is the weight matrix that penalizes
the states and R > 0 penalizes the input. The algebraic
Riccati equation is given by:
PA + A
T
P − PBR
−1
B
T
P + Q = 0 (10)
where the vector P is solution of (10). The state-
feedback optimal gains are determined by (Zhang
et al., 2014b).
K
ri
= R
−1
B
T
P (11)
In this way the state-feedback control law is de-
fined by:
u(t) = −K
ri
x(t) (12)
Where K
ri
=
K
r
k
i
is the state-feedback gains
vector. The cost of function (9) depends of Q and R
matrices for this purpose choosing these for VTOL
system as:
Q =
q
1
0 0
0 q
2
0
0 0 q
3
, R = [ρ
1
] (13)
A relationship between the response time, damp-
ing and control effort can be achieved by tuning the
individual weights q
i
and ρ
1
. These can be selected
as the inverse of the square of the error value for x
i
or u (Murray, 2009). Thus, control law (12) for outer
loop control of the VTOL system is rewritten as:
u(t) = −k
1
θ(t) − k
2
˙
θ(t) + k
i
Z
t
0
e
θ
(t)dt (14)
where, the error is defined as:
e
θ
(t) = θ
d
− θ(t) (15)
3.2 SMC Controller
The aim of Sliding Mode Control is to select a suit-
able surface that allows to slide the system by a de-
sired trajectory. SMC control law is composed of two
parts: a continuous u
eq
(t) and a discontinuous u
D
(t).
u
SMC
(t) = u
eq
(t) + u
D
(t) (16)
The first step to design SMC control is to define
a sliding surface S, which allows to obtain a desired
behavior (Camacho and Smith, 2000) for instace: sta-
bility, null steady state error, response time, damping.
Hence, It is reasonable to choose a LQI control law
(14) as a sliding surface.
S(t) = −k
1
θ(t) − k
2
˙
θ(t) + k
i
Z
t
0
e
θ
(t)dt (17)
For the purpose of finding the equivalent control
law u
eq
the procedure is followed: The control must
ensure that the output reaches a desired set point, thus
S reaches a constant value, the aim is to keep the out-
put equal to a desired reference θ
d
for all time which
means (Camacho and Smith, 2000):
˙
S(t) = 0 (18)
This is called sliding condition, by applying in
(17) it is obtained:
˙
S(t) = −k
1
˙
θ − k
2
¨
θ + k
i
e
θ
= 0 (19)
by Replacing (2), into (19), it is obtained:
˙
S(t) = −k
1
˙
θ − k
2
−B
˙
θ − Kθ + k
t
u
J
+ k
i
e
θ
= 0
(20)
Considering u = u
eq
, therefore from the sliding
condition the continuous part u
eq
of the SMC can be
writted as:
u
eq
=
B
k
t
−
Jk
1
k
2
k
t
˙
θ +
K
k
t
θ +
Jk
i
k
2
k
t
e
θ
(21)
and, by to complete the SMC control law, the dis-
continuous part is added:
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
608

u
SMC
=
B
k
t
−
Jk
1
k
2
k
t
˙
θ+
K
k
t
θ+
Jk
i
k
2
k
t
e
θ
+K
d
sign(S(t))
(22)
Where u
D
is responsible for reaching sliding sur-
face, which is composed of a non-linear fuction
sign(S(t)) that switches about the sliding surface and,
K
d
is a controller gain parameter.
To design u
D
, a function of Lyapunov is defined
as:
V =
1
2
S
2
(23)
Obviously, for all S(t) 6= 0 where V is positive-
define function, and
˙
V must be a negative-define func-
tion:
˙
V = S
˙
S < 0 (24)
Substituting (20) and, (22) into (24), it can be
found:
−
k
2
k
t
J
K
d
sign(S(t))
S < 0 (25)
where:
k
2
> 0, k
t
> 0, J > 0 (26)
Therefore, by analyzing
i f S(t) > 0 → sign(S(t)) > 0
i f S(t) < 0 → sign(S(t)) < 0
(27)
In order to satisfy (25), K
d
should be
K
d
> 0 (28)
for the purpose to reducing the chattering effect,
u
D
can be rewritten as a sigmoidal function (Camacho
and Smith, 2000)
u
D
(t) =
K
d
S
|
S
|
+ δ
(29)
Where δ, it is a tunning parameter to reduce the
chattering problem. Finally, the complete law of SMC
control with reduction of chattering effect is given by:
U
SMC
=
B
k
t
−
Jk
1
k
2
k
t
˙
θ +
K
k
t
θ +
Jk
i
k
2
k
t
e
θ
+
K
d
S
|
S
|
+ δ
(30)
The proposed control scheme of the system is il-
lustrated in Fig. 4.
Figure 4: SMC-LQI controller scheme.
4 SIMULATION RESULTS
The simulation using Simulink-MatLab
R
software
has been made to examine the controller behavior.
First, the performance of the designed controller is
tested by step change reference. Matrices Q and R
(13) are selected considering an error of θ =
π
30
[rad]
and, ε =
π
30
[radsec], which can be written as
Q =
30
π
2
0 0
0 0 0
0 0
30
π
2
, R = [1] (31)
By solving (9) with the LQI MatLab fuction, the
feedback gains K
ri
(11) is obtained:
K
ri
=
8.73 2.19 −9.55
(32)
Finally, the complete SMC control law is com-
puted with tunning parameters by trial and error for
lower ISE δ = 0.3 and K
d
= 1, which is given by:
u
SMC
= 3.4537θ − 0.9486
˙
θ + 5.8255e
θ
+
S
|
S
|
+ 0.3
(33)
In figure 5 shows the time reponse of pitch angle
θ and action control u with LQI and SMC-LQI con-
trollers for a step change reference of θ
d
=
π
6
[rad].
The SMC-LQI has a lower setting time and the
control action of the two controllers is below the phys-
ical values allowed by the system (±3[A]).
The robustness of the controller to uncertainties in
the physical parameters is tested using the ISE perfor-
mance index, which is calculated with:
ISE =
Z
t
0
e
2
(t)dt (34)
where: e(t): represents the error between θ
d
and
θ
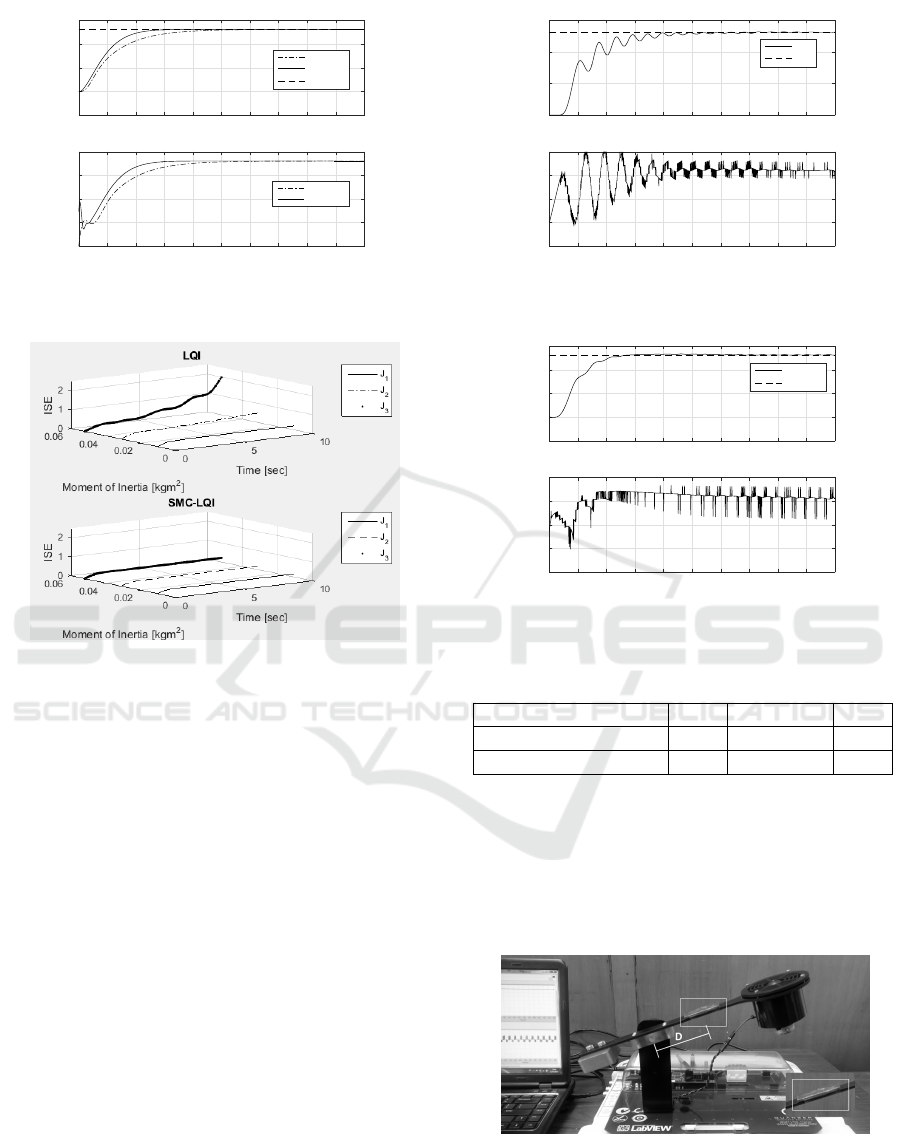
In figure 6 shows the evolution of the ISE to vari-
ations of the moment of inertia along the pitch axis J
of J
1
= 3J, J
1
= 9J and J
3
= 15J.
The ISE index of the SMC-LQI control is main-
tained for the variations of the J parameter, while
the ISE index of the LQI control is incremented for
J
3
= 15J.
A Blended Sliding Mode Control with Linear Quadratic Integral Control based on Reduced Order Model for a VTOL System
609
0 1 2 3 4 5 6 7 8 9 10
-0.2
0
0.2
0.4
0.6
θ [rad]
θ LQI
θ LQI-SMC
θ
d
0 1 2 3 4 5 6 7 8 9 10
Time [sec]
0
0.5
1
1.5
2
u [A]
u LQI
u SMC-LQI
Figure 5: Simulation results of LQI and SMC-LQI Con-
trollers for a step change reference.
Figure 6: ISE index of LQI and SMC-LQI for Moment of
Inertia variation.
5 EXPERIMENTAL RESULTS
In this section, experimental tests are presented. The
controllers are implemented in QNET VTOL trainer,
this is compatible with LabVIEW software. The fol-
lowing tests were considered: step change in the refer-
ence case, robustness to uncertainties in physical pa-
rameters and external disturbances.
5.1 Step Change Reference Test
The pitch angle position response for a desired step
change reference θ
d
= π/6[rad] and, the control ac-
tion u with LQI and, SMC-LQI controller are shown
in Fig. 7 and 8 respectively.
In Table 2 shows the ISE comparison between
both controllers for a step change reference, where the
SMC-LQI presents lower ISE than LQI for simulation
and, experimental results.
The SMC-LQI controller presents lower settling
time than LQI controller. In the first three seconds
the LQI controller is oscillating near the current limit
allowed by the system
0 1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
θ [rad]
θ LQI
θ
d
0 1 2 3 4 5 6 7 8 9 10
Time [sec]
-1
0
1
2
3
u [A]
Figure 7: Experimental results of LQI Controller for step a
change reference.
0 1 2 3 4 5 6 7 8 9 10
-0.2
0
0.2
0.4
0.6
θ [rad]
θ SMC-LQI
θ
d
0 1 2 3 4 5 6 7 8 9 10
Time [sec]
-1
0
1
2
3
u [A]
Figure 8: Experimental results of SMC-LQI Controller for
a step change reference.
Table 2: ISE Step change Reference.
LQI SMC-LQI ∆ %
Simulation Results 0.21 0.16 23.8
Experimental Results 1.91 2.87 50.2
5.2 Uncertain in Physical Parameter
Test
For this test, a small iron mass is added the VTOL
system physical body as is illustrated in Fig. 9.
Figure 9: VTOOL system under uncertain parameter test.
where the iron mass of m = 0.2312[k
g
] is located
a distance of D = 0.085[m] from pivot point of the
VTOL system body. It was added a mass to modify
the moment of inertia along pitch axis of the system.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
610

In figure 10 shows the time response of pitch angle
position θ for a step change reference of θ
d
=
π
18
[rad]
considering LQI and SMC-LQI controllers under the
uncertain parameter test.
0 1 2 3 4 5 6 7 8 9 10
Time [sec]
0
0.05
0.1
0.15
0.2
0.25
0.3
θ [rad]
θ LQI
θ SMC-LQI
θ
d
Figure 10: Experimental results of LQI and, SMC-LQI
Controllers for uncertain parameter test.
The LQI control for the uncertain parameter test
has an unstable behavior, while the SCM-LQI con-
troller is able to reach the desired reference and to
maintain on this with a small oscillation.
5.3 External Distubance Test
An external disturbance test is considered. A rubber
ball is used as illustrated in the Fig.11, where for an
initial pitch angle position θ
d
= 0[rad]. A external
disturbance produced by a rubber ball of mass m =
0.1481[k
g
] falling from an altitude of L = 0.005[m] is
applied.
Figure 11: VTOL under external disturbance test.
Figure 12 shows the pitch angle position time re-
sponse for the LQI and SMC-LQI controllers to the
external disturbance test. The LQI control presents an
unstable behavior and it is stopped around 6[sec] for
this there is not physical damage to the system, while
the SMC-LQI control presents a stable behaivor.
0 1 2 3 4 5 6 7 8 9 10
Time [sec]
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
θ [rad]
θ LQI
θ SMC-LQI
Reference
From here θ LQI fail
Figure 12: Experimental results of LQI and, SMC-LQI
Controller for an external disturbance
6 CONCLUSIONS
In this article, a LQI controller and a robust-optimal
controller with integral action SMC-LQI based on a
reduced order model are successfully designed and
implemented on the 1-DOF VTOL system.
The simulation and experimental results on the 1-
DOF VTOL system show that LQI and SMC-LQI
controllers are capable to reach a desired reference
for the step change reference test, but the SMC-LQI
presents a lower settling time and ISE performance in-
dex than LQI. For the uncertain parameter and the ex-
ternal disturbance tests on 1-DOF VTOL system, the
SMC-LQI controller presents better robustness than
LQI controller. It is verified on simulation and exper-
imental results.
ACKNOWLEDGEMENTS
Oscar Camacho thanks to PROMETEO Project of
SENESCYT, Republic of Ecuador, and authors thank
to PIJ-15-17 Project of the Escuela Polit
´
ecnica Na-
cional, for its sponsorship for the realization of this
work.
REFERENCES
Camacho, O. and Smith, C. A. (2000). Sliding mode con-
trol: an approach to regulate nonlinear chemical pro-
cesses. ISA transactions, 39(2):205–218.
Carri
`
ere, S., Caux, S., and Fadel, M. (2008). Optimal lqi
synthesis for speed control of synchronous actuator
under load inertia variations. IFAC Proceedings Vol-
umes, 41(2):5831–5836.
Chithra, R. and Koshy, T. (2016). Robust optimal sliding
mode control of twin rotor mimo system. Interna-
A Blended Sliding Mode Control with Linear Quadratic Integral Control based on Reduced Order Model for a VTOL System
611

tional Journal of Engineering Research and Technol-
ogy, 5(09):111–115.
Dong, R., Gao, H.-W., and Pan, Q.-X. (2011). Optimal slid-
ing mode control for nonlinear systems with uncer-
tainties. In Control and Decision Conference (CCDC),
2011 Chinese, pages 2098–2103. IEEE.
Han, S.-Y., Chen, Y.-H., Wang, L., Abraham, A., and
Zhong, X.-F. (2016). Sliding mode control for state
delayed systems subject to persistent disturbance. In
Systems, Man, and Cybernetics (SMC), 2016 IEEE
International Conference on, pages 000871–000874.
IEEE.
Mohammadbagheri, A., Zaeri, N., and Yaghoobi, M.
(2011). Comparison performance between pid and lqr
controllers for 4-leg voltage-source inverters. In Inter-
national Conference Circuit, System and Simulation.
Mondal, S. and Mahanta, C. (2013). Observer based sliding
mode control strategy for vertical take-off and landing
(vtol) aircraft system. In Industrial Electronics and
Applications (ICIEA), 2013 8th IEEE Conference on,
pages 1–6. IEEE.
Murray, R. M. (2009). Optimization-based control. Cali-
fornia Institute of Technology, CA.
Nawawi, M. R. M., Horng, C. S., Hashim, M. R., and
Hanaffi, A. N. (2011). Development of output feed-
back sliding mode control for nonlinear system with
disturbance. In Control System, Computing and Engi-
neering (ICCSCE), 2011 IEEE International Confer-
ence on, pages 495–499. IEEE.
Prusty, S. B., Seshagiri, S., Pati, U. C., and Mahapatra,
K. K. (2016). Sliding mode control of coupled tanks
using conditional integrators. In Control Conference
(ICC), 2016 Indian, pages 146–151. IEEE.
QUANSER (2011). User Manual QNET VTOL Tariner For
NI ELVIS.
Sabanovic, A., Fridman, L. M., and Spurgeon, S. K. (2004).
Variable structure systems: from principles to imple-
mentation, volume 66. IET.
Teimoori, H., Pota, H. R., Garratt, M., and Samal, M. K.
(2012). Attitude control of a miniature helicopter us-
ing optimal sliding mode control. In Control Confer-
ence (AUCC), 2012 2nd Australian, pages 295–300.
IEEE.
Zhang, Y., Gao, F., and Zeng, T.-y. (2014a). A sliding
mode controller design for vertical take-off and land-
ing based on model decoupling. In Control Con-
ference (CCC), 2014 33rd Chinese, pages 115–119.
IEEE.
Zhang, Y., Song, L., Zhao, G., Liu, L., and Yao, Q. (2014b).
Variable gain linear quadratic regulator and its ap-
plication. In Mechatronics and Automation (ICMA),
2014 IEEE International Conference on, pages 1745–
1750. IEEE.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
612
