
The Biocybernetic Loop Engine: An Integrated Tool for Creating
Physiologically Adaptive Videogames
J. E. Muñoz , E. R. Gouveia, M. S. Cameirão and S. Bermudez I. Badia
Madeira Interactive Technologies Institute, Funchal, Portugal
Universidade da Madeira, Funchal, Portugal
Keywords: Biocybernetic Loop, Videogames, Adaptation, Software, Visual Scripting, Exergames, Heart Rate,
Unity3D.
Abstract: Biocybernetic loops (BLs) are physiological adaptation mechanisms created to augment human-computer
interaction by interpreting human behaviour via physiological responses. Because of its inherent
complexity, the development of BLs has been mainly utilized within the academic environment, with
limited use of physiologically adaptive systems in promising fields such as assistive and gaming
technologies. The Biocybernetic Loop Engine (BL Engine) is an integrated software tool designed for an
easy creation of physiologically modulated videogames by means of wearable sensors. The BL Engine
includes a signal acquisition panel, which facilitates the connectivity of multiple physiological sensors and
the processing of their signals, a biocybernetic console to rapidly create and iterate adaptive rules using a
visual scripting module, and a game connector tool that ties physiological modulations to game variables. In
this paper, we present the BL Engine software architecture, its design and implementation process, as well
as a proof-of-concept of the system applied to an exergaming experience aiming to improve
cardiorespiratory fitness training in older adults. By developing integrated tools that aid the design and
implementation of BLs in videogames, we aim to contribute to the dissemination and widespread use of this
approach in the gaming industry and serious gaming applications.
1 INTRODUCTION
Physiological computing systems are designed to
capture responses of the central and peripheral
nervous systems (Fairclough, 2009). This approach
offers a novel input control between users and
machines (Fairclough and Gilleade, 2014). One use
of such approach is to dynamically adjust systems to
challenge or provide assistance to users (Gilleade et
al., 2005). The concept of physiologically adaptive
systems has been widely developed and documented
following the biocybernetic loop (BL) construct. BL
utilizes the close-loop control, data analysis,
decision making and artificial intelligence from
Wiener’s cybernetics and applies them to
physiological computing (Novikov, 2016). This
method has been used for instance to assist pilots by
detecting their workload levels (Pope et al., 1995);
deliver in an autonomous, timely, consistent and
accurate way therapy/drugs to patients (Loeb and
Cannesson, 2017) (Mishra and Gazzaley, 2014);
adapt difficulty levels in musical learning tasks
(Yuksel et al., 2016); and challenge and increase
exertion in players during exercising with
videogames (exergames) based on real-time cardiac
responses (Stach et al., 2009). The use of BL
adaptations in videogames has shown that stress,
boredom, enjoyment, anxiety, engagement,
concentration, and alertness can be effectively used
to improve the overall game user experience
(Bontchev, 2016). Despite the increasing popularity
of BLs among game designers and game user
researchers (Pope et al., 2014), its implementation
still faces several limitations regarding the
integration of physiological sensors, the processing
of signals, and the communication between
physiological systems and videogames (Novak,
2014).
In this paper, we present the development of the
Biocybernetic Loop Engine (BL Engine), a flexible
and integrated software tool (from sensing to
decision making) to create BLs. Our solution is
technology agnostic and can be integrated into any
existing software platform. The BL Engine builds on
Muñoz, J., Gouveia, E., Cameirão, M. and Badia, S.
The Biocybernetic Loop Engine: An Integrated Tool for Creating Physiologically Adaptive Videogames.
DOI: 10.5220/0006429800450054
In Proceedings of the 4th International Conference on Physiological Computing Systems (PhyCS 2017), pages 45-54
ISBN: 978-989-758-268-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
45

top of a solid BL theoretical construct (Serbedzija
and Fairclough, 2009) and proposes a more practical
and applied adaptation technique. We start by
describing the available software platforms that can
be used to construct BLs highlighting some of their
characteristics, advantages and limitations; then we
introduce our BL Engine framework, including
software design and implementation processes.
Finally, a proof-of-concept experiment is presented
using heart rate (HR) based adaptation in a
cardiorespiratory fitness exergame.
2 RELATED WORK
The development of BLs has been advanced by
academia mainly for research purposes (Pope et al.,
2014). Several examples have demonstrated the
efficacy of physiological adaptation to improve
system automation (Prinzel III et al., 2003), player
engagement in gaming experiences (Ewing et al.,
2016) and exertion levels in fitness interventions
(Ketcheson et al., 2015). Although BLs enable the
creation of genuine intelligent systems that use
implicit task-context and user-intention information
(Jacucci et al., 2015), the creation of such systems is
inherently difficult. The fundamental architecture of
BLs requires a systematic integration of human-
body signals, data conditioning for artefact removal
and noise reduction, a feature extraction stage, and a
psychophysiological inference process to finally
translate data to action (Fairclough and Gilleade,
2012). As a result, this is an arduous process and
most of the time the construction of BLs is custom-
built for single-task systems, which makes it
difficult to replicate or generalize to other
applications (Pope et al., 2014). This impedes
researchers and developers to rapidly design,
construct, iterate and validated new prototypes.
Some software tools have emerged in the last
decade to facilitate the creation of BLs and
spreading the use of physiological adaptation for
multiple purposes. Interestingly, all of them use
visual language scripting techniques to simplify the
construction process. One well-known example is
the OpenViBE software platform (Renard et al.,
2010), an open-sourced tool created to support
brain-computer interface (BCI) experiments. Using a
modular, flexible and simplistic architecture,
OpenViBE has been successfully used in closed-
loop systems for assistive technology such as
spellers, as well as for BCI videogames and virtual
reality simulations (Clerc et al., 2016)
(Vourvopoulos et al., 2015). Although OpenViBE
has been mainly used for BCI applications, studies
using ECG data for tangible interfaces (Gervais et
al., 2016) showed the potential of the software
besides neurophysiological signals. The FlyLoop
framework (Peck et al., 2015) is a small and
lightweight approach in Java that enables
programmers to rapidly develop and experiment
with physiologically intelligent systems. The system
is presented as a tool to improve decision-making in
workload detection via wearable biosensors.
Consisting of a set of four modules (data sources,
filters, learners, and outputs), the framework is
designed to provide reproducibility and accessibility
to non-programmer users. Finally, the Neuromore
platform was initially designed as a flexible tool to
create novel biofeedback visualizations (Jillich,
2014) (Kosch et al., 2016). Nowadays the tool is
presented as a development platform for interactive
applications which can combine real time
physiological data and machine intelligence to create
BLs. Focused in the use of wearable and low-cost
BCI systems, Neuromore combines multiple
technologies to connect commercial-grade
physiological sensors with visual scripting. It can
process data and classify it in terms of states of mind
such as focus, relaxation, flow, creativity or
concentration. Unfortunately, the software is still in
early stages and the integration with game engines is
still unclear.
Some features are still lacking in current
software tools to create physiologically adaptive
videogames, specifically: a) versatility to support
multiple body signals; b) integration with game
engines; and c) simplicity to create adaptation rules.
To tackle the limitations of the existing technologies
we have developed the Biocybernetic Loop Engine.
3 THE BIOCYBERNETIC LOOP
ENGINE FRAMEWORK
3.1 Software Design and Development
3.1.1 Design Requirements
The BL engine software was designed to be used by
people both with and without specific training in
physiological computing and/or programming skills.
We identified a list of implementation requirements
that guided the design of the BL Engine in the signal
acquisition, signal processing and feature extraction,
and adaptation domains, as well as its integration
with other software systems.
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
46
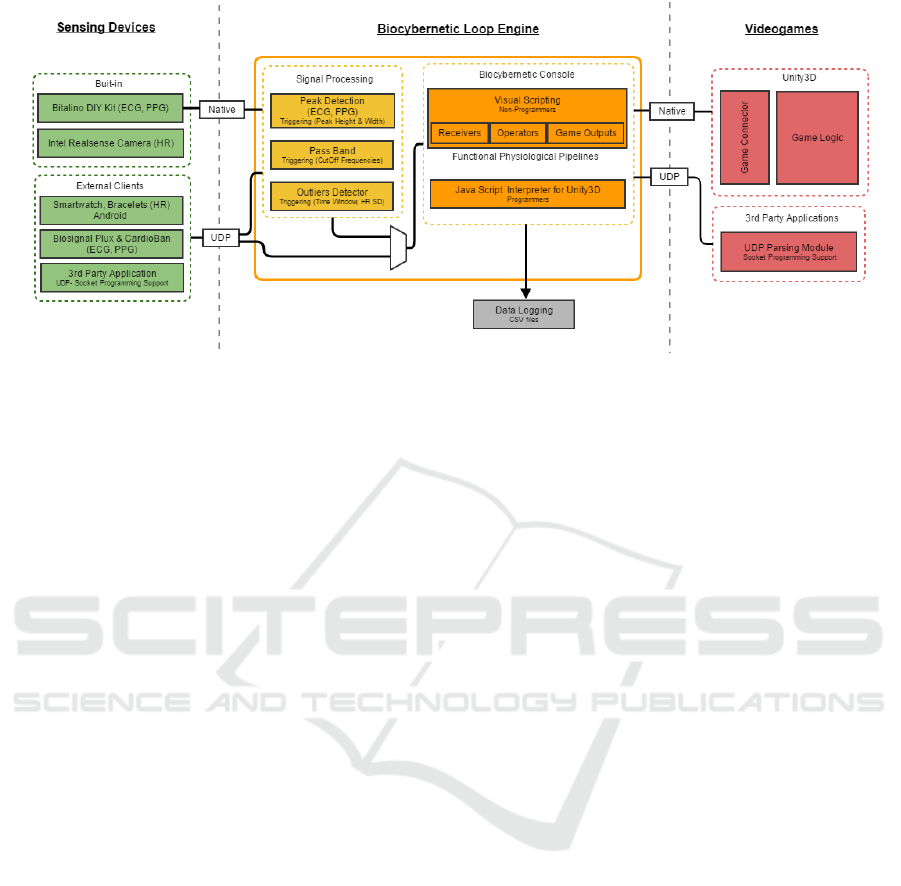
Figure 1: The BL Engine system architecture, which covers the signal acquisition stage via supporting multiple sensing
devices and allowing a basic processing of the signals to extract the HR data. It includes a console to create adaptive rules
and facilitates the communication with videogames, natively supporting those developed in Unity3D.
Signal Acquisition, Signal Processing and Feature
Extraction: one of the biggest limitations when using
physiological signals in interactive projects is the
connectivity with multiple devices. The lack of
standardization of components, different communi-
cation protocols and measurements offer a highly
variable scenario (Novak, 2014), thus the BL engine
should facilitate and streamline the signal acquisition
process. Further, the real time signal processing of the
acquired signals is an engineering challenge (Jacucci
et al., 2015), and thus, the inclusion of common filters
to process signals is imperative. Finally, although the
features commonly extracted from physiological
signals to carry out psychophysiological inferences
are relatively well-defined (Cowley et al., 2016), their
use for biocybernetic adaptation is still not well
understood. Thus, the extraction of meaningful
physiological parameters from sensor signals is
necessary as they are the main input of the BLs.
Adaptation: the second set of requirements relates to
the design of the adaptive rules, which contain the
intelligence of the BL system. Essentially, these
rules encompass the decision-making process
underlying physiological adaptation. Although
simple Boolean rules based on if/then rules have
been successfully used in past investigations (Karran
et al., 2015), more advanced techniques based on
proportional-integral-derivative control (Parnandi et
al., 2013) and machine learning approaches
(Verhulst et al., 2015) have also shown encouraging
results. Despite those advances, the implementation
and iteration of adaptive rules in BLs require
extensive reprogramming processes in order to
create playable prototypes (Pope et al., 2014).
Consequently, our BL engine should embrace an
agile methodology that facilitates the generation of
adaptive rules and enables a fast iteration on them.
Integration: finally, a full integration with third
party software systems, such as videogames, is
required. Even though excellent game engines are
freely available (e.g. Unity3D, Unreal Engine), the
integration of physiological computing technologies
in those systems is not a simple task due to the lack
of standardized and functional signal processing
toolboxes (Bontchev, 2016). Only few examples
enable the integration of physiological sensors with
the Unity3D game engine such as the PhysSigTK
(Rank and Lu, 2015), RehabNet CP (Vourvopoulos
et al., 2013) and PhysioVR framework (Muñoz et
al., 2016). However, BLs require not only a simple
integration of sensors but also a bi-directional
communication between the extracted physiological
parameters and the videogame variables in real time.
3.1.2 Design Process
The BL Engine aims to be an extensive tool for the
creation of BLs in multiple dimensions such as
cardiac, muscular, emotional or motor domains. At
this stage we developed the cardiac module and tested
its functionality implementing a BL in gaming
applications. We used multiple techniques from
software engineering for the development - process
workflow understanding, activities and system
dynamics visualization relying on flow and UML
diagrams of the system, and low fidelity prototyping
through digital interactive wireframes-prior to its
implementation.
The Biocybernetic Loop Engine: An Integrated Tool for Creating Physiologically Adaptive Videogames
47
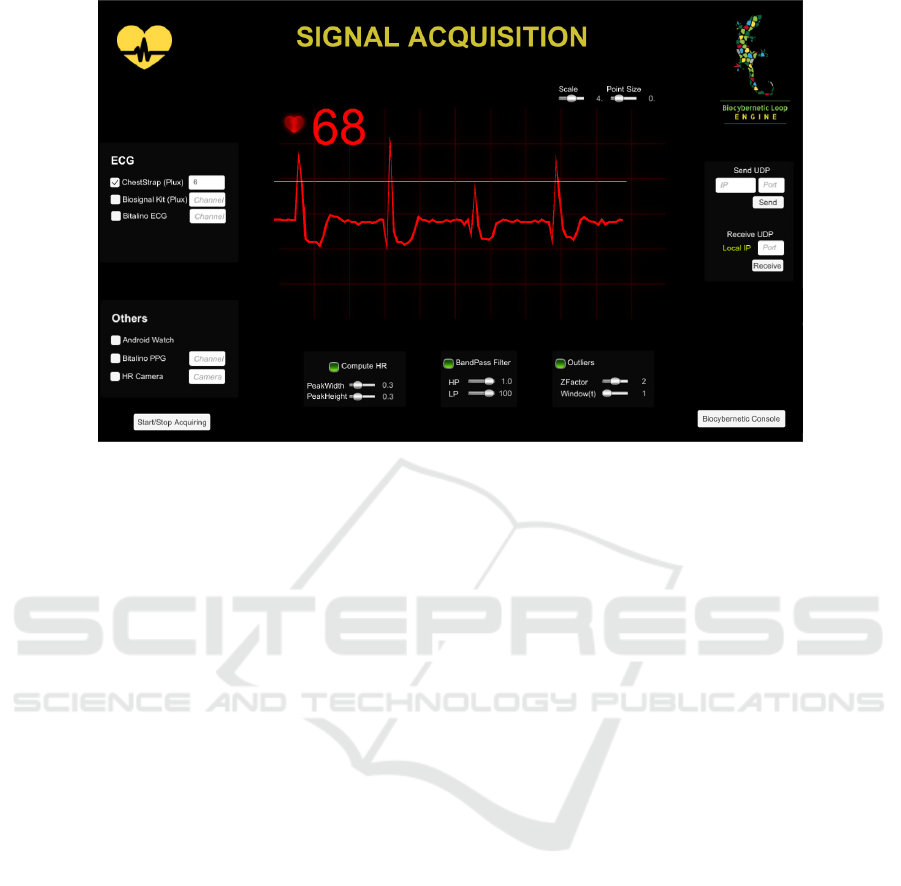
Figure 2: Screenshot of the Signal Acquisition Panel in the BL Engine. The image shows an ECG signal from the
CardioBan chest strap (PLUX, Lisbon, Portugal) with the computed HR. Options for band-pass filtering and outliers’
detection are activated to improve the HR computation.
3.1.3 Implementation
The BL Engine is a software tool implemented in
Unity 3D (Unity Technologies, San Francisco, USA)
and it is composed by 3 main modules: a) the signal
acquisition panel, b) the biocybernetic console, and
c) the game connector. Using the BL Engine, users
are able to easily design physiological adaptations of
their videogames following the complete processing
pipeline from physiological data collection, analysis
to the final translation in videogames (see figure 1).
Signal Acquisition Panel: the BL Engine supports
the acquisition of a basic range of wearable devices
(figure 2) including the Biosignal Plux (PLUX,
Lisbon, Portugal), a professional biosignal
acquisition kit with 8-12 bit resolution and 1000Hz
sampling rate that measures blood volume pressure
through photopletysmography (PPG),
electrocardiography (ECG), electromyography
(EMG), electrodermal activity (EDA), and
respiration; a chest strap sensor called CardioBan
(PLUX, Lisbon, Portugal) with integrated ECG,
respiration and acceleration sensors; Bitalino
(PLUX, Lisbon, Portugal), a low cost DIY biosignal
board with ECG, EMG, light intensity, and
acceleration sensing; HR data streamed from the
RealSense Intel camera (Intel, California, USA); and
HR data through Android Wear devices such as
smartwatches and wristbands through the PhysioVR
App (Muñoz et al., 2016). UDP is used for the
communication of the Bioplux, CardioBan and the
android wearables through external applications
streaming it in the RehabNet protocol
(Vourvopoulos et al., 2013), while the Bitalino
integration is natively supported by the BL Engine
through a serial port interface over a bluetooth
connection.
The signal acquisition panel also includes a signal
visualization to facilitate the real time data analysis
and the feature extraction from data. Two cardiac-
related signals can be processed at this stage: PPG
and ECG. The acquisition panel includes algorithms
for the HR computation based on an adaptive peak-
detection technique. Both the peak width and the
peak height can be manually adjusted, and
adjustable band-pass filters can be used to improve
the accuracy of the HR computation. Finally, after
the HR computation, an outlier detection algorithm
is used based on the following statistical descriptors:
= ( −
) > ( ∗ ())
(1)
where X are the HR measurements in a temporal
window,
is the mean value of X, and () the
standard deviation of X. zFactor is a constant with a
default value of 2, meaning that every HR data point
that differs by more than 2 standard deviations from
the previous data point will be considered an outlier.
The filtered HR data is then sent to the
Biocybernetic Console for further processing.
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
48
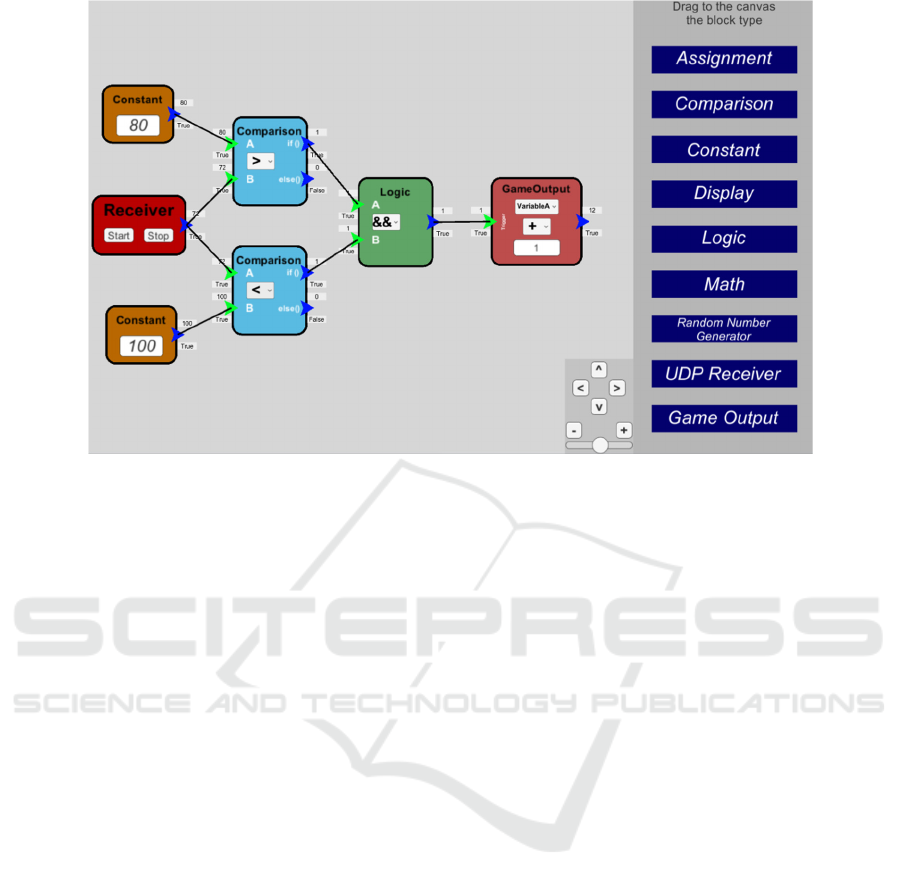
Figure 3: A screenshot of the Biocybernetic Console in the BL Engine representing an adaptation rule in which the game
Variable A is increased by a value of one (1) once the HR is between 80 and 100 BPMs.
Biocybernetic Console: this console is designed to
facilitate the construction of the adaptive rules that
use the output computed by the signal acquisition
panel to influence the videogame functioning (figure
3). This is achieved through a visual scripting
module, which comprises the use of pre-
programmed boxes that can be graphically
connected to create adaptive rules through functional
physiological pipelines (FPP). The blocks can be
dragged-and-dropped from the right-side canvas to
the left workspace, and inputs and outputs of the
boxes can be connected drawing connecting lines.
Additionally, the workspace size can be modified
allowing the creation of multiple FPPs that can run
in parallel using inputs from different physiological
sensors. The blocks fall into three different
categories:
• Receivers: blocks that receive and/or simulate
data. Here, we can even receive data directly
from the signal acquisition panel or data coming
from any external application supporting socket
programming through the UDP Reh@Net
protocol.
• Operators: blocks that make comparisons,
mathematical and logical operations, and
variables’ assignments. Blocks for adding
constants and visualizing results are also
implemented.
• Game outputs: blocks for modifying game
variables in real time. Game variables are
exposed to the BL Engine using the Unity3D
Game Connector module or through UDP for
third-party applications.
Finally, to expand the possibilities of creating
adaptation rules, the biocybernetic console includes
a JavaScript interpreter that allows the generation of
more complex adaptation rules directly coding them
and executing them on-the-fly. After the rule
creation process, users can test its behaviour in real-
time and iterate with multiple adaptive rules during
run-time. Data from both the BL Engine and the
videogame can be synchronously recorded for post-
processing using a CSV data writer script.
Game Connector: to enable the connectivity
between the BL Engine and the videogames, we
provide the game connector module, which is
wrapped into a prefabricated package (prefab) that
can be integrated in any videogame developed in
Unity 3D. The Unity prefab package contains the
scripts needed for bidirectional communication with
the BL Engine. The connector receives the
physiological data via UDP communication, makes
specific videogame variables available to the
Biocybernetic Console for the creation of the
adaptation rules, and updates them in real time
accordingly. Any third party application supporting
socket programming (such as Unreal Engine and
others) can also receive data from the biocybernetic
console via a UDP parsing module.
The Biocybernetic Loop Engine: An Integrated Tool for Creating Physiologically Adaptive Videogames
49
4 PRELIMINARY ASSESSMENT
With the objective of assessing the feasibility of
using the BL Engine technology to create
physiologically adaptive videogames, we presented
a case study using HR data in an Exergaming
experience.
4.1 Physiologically Adaptive Exerpong
4.1.1 Exergame Design
Exerpong is an exergame developed in Unity3D and
designed for agility and balance training in active
seniors (Muñoz J.E. et al., 2016). The exergame was
designed as an adaptation of the classic 2D Pong in
which the goal is to hit a ball using a virtual paddle.
We used the BL Engine to make adaptations based
on the HR of users during Exerpong gameplay, with
the goal of driving their HR to a target zone. The
target HR zone is expressed in terms of the heart rate
reserve (HRR) which is the difference between the
maximum HR and the HR during the resting state. In
this zone, the health benefits of a cardiorespiratory
training session can be maximized via stressing the
cardiac muscle without over-exercised it (Heyward
and Gibson, 2014). For older adults, the ACSM
recommends exercise at 40% to 70% of the HRR for
moderate intensities (Rahl, 2010) during sessions of
20 to 30 minutes.
Game parameters are adjusted following the dual
flow model for exergaming (Sinclair et al., 2009), in
our case to adapt for Gameplay and
CardioRespiratory Fitness. Gameplay adaptation
changes games parameters to improve game
attractiveness and balance the challenge in the
following way:
• The paddle size decreases once the player hits
the ball and increases once he/she misses it.
• The ball velocity decreases if the player misses
three consecutive balls.
The CardioRespiratory Fitness component of the
Exerpong is adapted using the real time HR data
according to the following rule:
• The ball velocity increases if the 30-seconds HR
average is under 50% of the HRR, and
decreases otherwise.
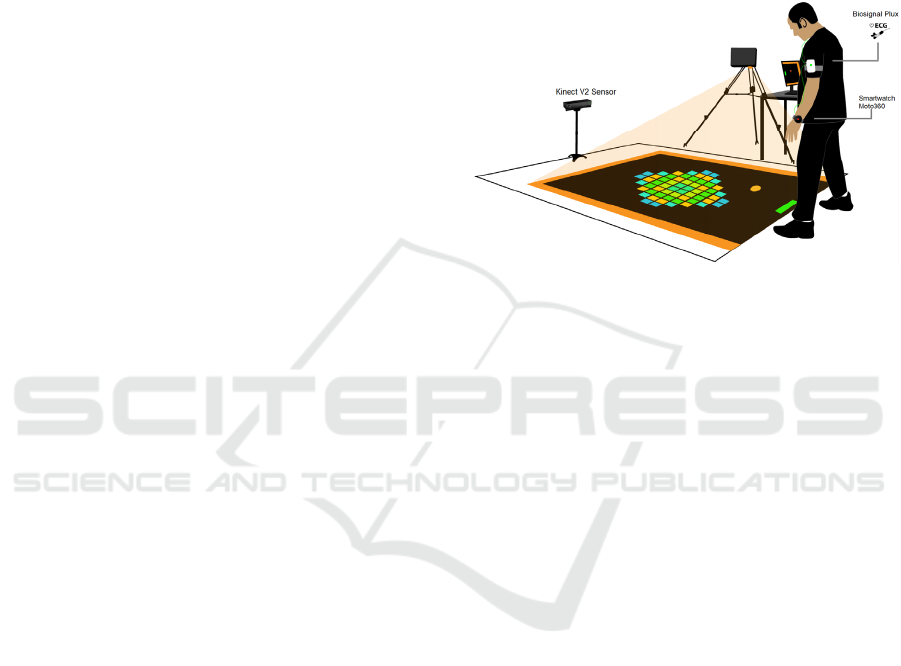
4.1.2 Experimental Setup
A white 2.5m x 3.0m PVC surface was used to
project Exerpong on the floor. The KinectV2 sensor
(Microsoft, Washington, USA) was used for
tracking the user’s waist position and mapping it to
the paddle position. A smartwatch Motorola 360
Sport was used to capture HR data at 1 Hz sampling
frequency as input for the physiological adaptation.
ECG signals were recorded using the Biosignal Plux
at 1000 Hz through a triode dry electrode placed on
the V
2
pre-cordial derivation. An extra-elastic band
was used to reinforce the contact and stability
between the electrodes and the skin during the
exercise. The figure 4 shows the experimental setup.
Figure 4: Diagram illustrating the experiment setup for the
adaptive Exerpong consisting of a KinectV2 sensor, a
projected environment and the physiological sensors.
The HR computed via the post-processing of
ECG signals was used as a ground-truth and
compared with the smartwatch data.
4.2 Case Study
A community-dwelling 62-years-old female
participated in the study. The participant was
recruited at a local senior sports facility. The
Montreal Cognitive Assessment (MoCA) (Freitas et
al., 2011) was used for cognitive screening. The
participant scored 29/30, indicating normal cognitive
function to understand the instructions and
participate in the experiment. The level of physical
activity was assessed using the short version of the
International Physical Activity Questionnaire
(IPAQ) (Booth et al., 2003), through which the user
was categorized for moderate intensity of physical
activity. The body mass index was 24 kg/m
2
,
indicating normal weight. The HR during a 5
minutes resting period was calculated as 71 BPMs,
while the HR maximum was estimated to be 164
BPMs following Tanaka’s formula (Tanaka et al.,
2001). Then, the target HR value was established as
117 BPMs (50% of HRR).
4.3 Protocol
After arrival, the participant received the informa-
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
50
tion about the study, signed an informed consent,
provided the demographic information, and
underwent IPAQ and MoCA assessments.
Subsequently, the participant was asked to remain 5
minutes seated for collection of HR data during
resting. ECG signals and the HR from the
smartwatch were collected synchronously. A short
stretching routine was used to facilitate the muscle
and tendons exertion of the lower limbs. The game
mechanics of the Exerpong were explained before
starting. The value for ball velocity started from the
minimum and changed every 30 seconds following
the BL Engine adaptations described before. Initial
parameters of the user such as age, HR during
resting and target HR percentage were configured
for the adaptation. The interaction with the adaptive
Exerpong lasted 20 minutes.
4.4 Results
In order to validate the use of the smartwatch as
real-time input to the BL Engine, the post-processed
HR data from the ECG signals was used for
comparison with the data from the smartwatch. A
low root-mean-square-error of 5 BPMs was
computed, which is in accordance with previously
reported values (Mike Prospero, 2016).
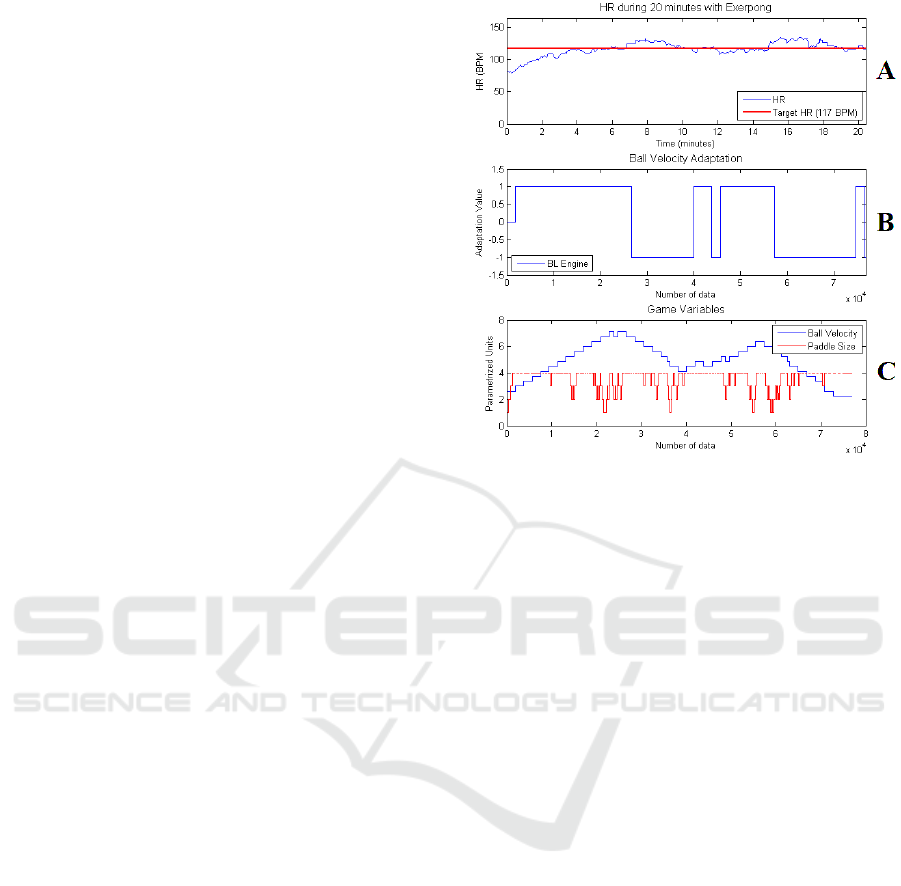
Figure 5 shows the resulting Gameplay and
CardioRespiratory Fitness adaptations during
exercising with the physiologically adaptive
Exerpong. Figure 5A shows the HR measurements
of the user during the complete session, and the red
line indicates the target HR value (117 BPMs). We
can observe from the data that after approximately
six minutes of training the user reached the expected
value. Figure 5B shows that this happens as a result
of a constant increase in ball velocity. Through
playing ExerPong, the user achieved an average HR
of 116 BPMs, very close to the intended target HR.
This value is considerably higher than the registered
average HR in a conventional training session in the
same senior gym, which is 93 BPMs.
Figure 5B shows the dynamics of the
CardioRespiratory Fitness adaptations by the BL
Engine to modify the ball velocity. The result is a
classic bang-bang controller switching between +1
and -1 values depending on the HR value relative to
the target. It can be observed that despite the binary
decisions, the BL Engine successfully engaged the
user and modulated her HR oscillating around the
target value, crossing it multiple times (minutes 6,
10, 12, 14, 18) during the session as reaction to the
game adaptations. Finally, Figure 5C shows the
behaviour of the two game variables that were
Figure 5: Adaptation during the session with Exerpong. A:
HR responses (blue line) and target heart rate (red line); B:
adaptation values (+1 or -1) sent from the BL Engine to
increase or decrease the ball velocity; C: behavior of both
paddle size and ball velocity game parameters.
modified by both Gameplay and CardioRespiratory
Fitness adaptations. It can be observed that the ball
speed (blue line) acted as the main driver for the
changes in HR values. A cross-correlation analysis
of those two variables showed a very high similarity
(0.82). Moreover, the paddle size (red line) was
being reduced by the Gameplay adaptations, making
the task more challenging and encouraging
movement performance, thus facilitating the
modulation of HR responses.
5 DISCUSSION & CONCLUSION
This paper presented the design, implementation and
a proof-of-concept of the Biocybernetic Loop
Engine tool, which is freely available at:
http://neurorehabilitation.m-iti.org/tools/blengine.
The here presented proof-of-concept experiment
evaluated the feasibility of including BLs to adapt
exergaming experiences for the maximization of its
effectiveness for cardiorespiratory training in
seniors. This is maybe one of the more complex
scenarios for real-time HR-based adaptation, since
monitoring cardiac responses during exercise is
particularly challenging due to movement artefacts.
The use of tools such as the BL Engine will
facilitate a better understanding of the role of BLs in
The Biocybernetic Loop Engine: An Integrated Tool for Creating Physiologically Adaptive Videogames
51

gaming technologies, a more streamlined
connectivity with physiological sensors, a fast
iteration of adaptation techniques, and an easy
integration of physiological intelligence in
videogames. The BL Engine addresses such
challenges through relatively low-cost and wearable
physiological sensors such as smartwatches, utilizes
a fully functional and modular user interface,
integrates a visual scripting module, which
facilitates programming the adaptation rules, and
provides tools for a simplistic integration of any
videogame developed in Unity3D. Furthermore, the
system provides a integrated and comprehensible
architecture which might facilitate the incorporation
of multiple physiological features streamed from
several sensors and captured in the biocybernetic
console, hence permitting the conception of
multimodal BLs (D’mello and Kory, 2015).
Novel physiologically modulated videogames
might overcome the existing limitations and become
part of our daily activities through systems such as
exergames for exercise prescription or interactive
applications for stress management. This will bring
uncountable benefits in augmenting human
computer interactions. Through the integration of
physiological adaptation, more affective and
personalized videogames can be developed enabling
a fluent communication between the physiological
parameters and the videogame variables.
6 FUTURE WORK
Currently, we are planning a cross-sectional study
with the adaptive Exerpong in a group of senior
users for evaluating the appropriateness of the
adaptation for boosting effectiveness in exergaming-
based interventions for exercise promotion. In
addition, a longitudinal intervention will be
conducted, to compare the effectiveness of such
approach in comparison to traditional physical
exercise activities.
An interesting future application of the BL
Engine could be the creation of adaptive rules based
on heart rate variability (HRV) analysis using
specific measurements which have been associated
to workload and stress. For instance, novel serious
videogames for stress management can react
dynamically to HRV parameters such as the SDNN
(standard deviation of normal R-R intervals). This
will provide a very compelling scenario for train the
awareness of one’s internal physiological states (also
called interoceptive awareness) (Schulz and Vögele,
2015), which might be one of the cornerstones in the
wellbeing upsurge via physiological computing
technologies (Critchley et al., 2004). Finally, we
believe that the BLs have high potential for being
integrated with virtual reality applications, opening
up a new communication pathway for adaptive
contents creation (Siriborvornratanakul, 2016).
Although the BL Engine only contains the
cardiorespiratory module at this stage, the simplified
data collection and analysis and translation model
can be transversally used for physiological
adaptations besides cardiac-related signals.
7 CONTRIBUTIONS
JEM and SBB defined and designed the BL Engine.
JEM implemented the software. All authors defined
the experimental protocol. JEM collected and
analyzed the data. All authors interpreted the results.
All authors revised and approved the current version
of the manuscript.
ACKNOWLEDGEMENTS
The authors would like to thank Teresa Paulino for
developing the Exerpong, and for contributing to the
development of the signal acquisition panel, the
game connector, and the final integration of the
system; and Luis Quintero for contributing to the
development of the visual scripting module for the
biocybernetic console. This work was supported by
the Portuguese Foundation for Science and
Technology through the Augmented Human
Assistance project (CMUP-ERI/HCI/0046/2013),
Projeto Estratégico UID/EEA/50009/2013, and
ARDITI (Agência Regional para o Desenvolvimento
da Investigação, Tecnologia e Inovação).
REFERENCES
Bontchev, B., 2016. Adaptation in Affective Video
Games: A Literature Review. Cybern. Inf. Technol. 16,
3–34.
Booth, M. L., Ainsworth, B. E., Pratt, M., Ekelund, U.,
Yngve, A., Sallis, J. F., Oja, P., 2003. International
physical activity questionnaire: 12-country reliability
and validity. Med Sci Sports Exerc 195, 3508–1381.
Clerc, M., Bougrain, L., Lotte, F., 2016. Brain-Computer
Interfaces 2: Technology and Applications. John
Wiley & Sons.
Cowley, B., Filetti, M., Lukander, K., Torniainen, J.,
Henelius, A., Ahonen, L., Barral, O., Kosunen, I.,
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
52

Valtonen, T., Huotilainen, M., others, 2016. The
Psychophysiology Primer: A Guide to Methods and a
Broad Review with a Focus on Human–Computer
Interaction. Found. Trends® Human–Computer
Interact. 9, 151–308.
Critchley, H. D., Wiens, S., Rotshtein, P., Öhman, A.,
Dolan, R. J., 2004. Neural systems supporting
interoceptive awareness. Nat. Neurosci. 7, 189–195.
D’Mello, S. K., Kory, J., 2015. A review and meta-
analysis of multimodal affect detection systems. ACM
Comput. Surv. CSUR 47, 43.
Ewing, K. C., Fairclough, S. H., Gilleade, K., 2016.
Evaluation of an Adaptive Game that Uses EEG
Measures Validated during the Design Process as
Inputs to a Biocybernetic Loop. Front. Hum. Neurosci.
10.
Fairclough, S., Gilleade, K., 2012. Construction of the
Biocybernetic Loop: A Case Study, in: Proceedings of
the 14th ACM International Conference on
Multimodal Interaction, ICMI ’12. ACM, New York,
NY, USA, pp. 571–578. doi: 10.1145/2388676.
2388797.
Fairclough, S. H., 2009. Fundamentals of physiological
computing. Interact. Comput. 21, 133–145.
Fairclough, S. H., Gilleade, K., 2014. Advances in
physiological computing. Springer.
Freitas, S., Simões, M.R., Alves, L., Santana, I., 2011.
Montreal Cognitive Assessment (MoCA): normative
study for the Portuguese population. J. Clin. Exp.
Neuropsychol. 33, 989–996.
Gervais, R., Frey, J., Gay, A., Lotte, F., Hachet, M., 2016.
Tobe: Tangible out-of-body experience, in:
Proceedings of the TEI’16: Tenth International
Conference on Tangible, Embedded, and Embodied
Interaction. ACM, pp. 227–235.
Gilleade, K., Dix, A., Allanson, J., 2005. Affective
Videogames and Modes of Affective Gaming: Assist
Me, Challenge Me, Emote Me. Presented at the
DiGRA 2005: Changing Views – Worlds in Play.
Heyward, V. H., Gibson, A., 2014. Advanced Fitness
Assessment and Exercise Prescription 7th Edition.
Human Kinetics.
Jacucci, G., Fairclough, S., Solovey, E.T., 2015.
Physiological Computing. Computer 48, 12–16.
doi:10.1109/MC.2015.291.
Jillich, B., 2014. Acquisition, analysis and visualization of
data from physiological sensors for biofeedback
applications.
Karran, A. J., Fairclough, S. H., Gilleade, K., 2015. A
framework for psychophysiological classification
within a cultural heritage context using interest. ACM
Trans. Comput.-Hum. Interact. TOCHI 21, 34.
Ketcheson, M., Ye, Z., Graham, T.C.N., 2015. Designing
for Exertion: How Heart-Rate Power-ups Increase
Physical Activity in Exergames, in: Proceedings of the
2015 Annual Symposium on Computer-Human
Interaction in Play, CHI PLAY ’15. ACM, New York,
NY, USA, pp. 79–89. doi:10.1145/2793107.2793122.
Kosch, T., Hassib, M., Schmidt, A., 2016. The Brain
Matters: A 3D Real-Time Visualization to Examine
Brain Source Activation Leveraging Neurofeedback,
in: Proceedings of the 2016 CHI Conference Extended
Abstracts on Human Factors in Computing Systems.
ACM, pp. 1570–1576.
Loeb, R. G., Cannesson, M., 2017. Closed-Loop
Anesthesia: Ready for Prime Time? LWW.
Mike Prospero, 2016. Who Has The Most Accurate Heart
Rate Monitor? Tomsguide.
Mishra, J., Gazzaley, A., 2014. Closed-loop rehabilitation
of age-related cognitive disorders, in: Seminars in
Neurology. Thieme Medical Publishers, pp. 584–590.
Muñoz J. E., Bermudez S., Rubio E., Cameirao M., 2016.
Modulation of Physiological Responses and Activity
Levels During Exergame Experiences, in: 2016 18th
International Conference on Virtual Worlds and
Games for Serious Applications. IEEE, p. In press.
Muñoz, J. E., Paulino, T., Vasanth, H., Baras, K., 2016.
PhysioVR: A novel mobile virtual reality framework
for physiological computing, in: E-Health Networking,
Applications and Services (Healthcom), 2016 IEEE
18th International Conference on. IEEE, pp. 1–6.
Novak, D., 2014. Engineering Issues in Physiological
Computing, in: Advances in Physiological Computing.
Springer, pp. 17–38.
Novikov, D. A., 2016. Cybernetics in the 20th Century, in:
Cybernetics. Springer, pp. 1–19.
Parnandi, A., Son, Y., Gutierrez-Osuna, R., 2013. A
Control-Theoretic Approach to Adaptive Physiolo-
gical Games, in: 2013 Humaine Association
Conference on Affective Computing and Intelligent
Interaction. Presented at the 2013 Humaine
Association Conference on Affective Computing and
Intelligent Interaction, pp. 7–12. doi: 10.1109/ACII.
2013.8.
Peck, E. M., Easse, E., Marshall, N., Stratton, W., Perrone,
L. F., 2015. FlyLoop: a micro framework for rapid
development of physiological computing systems, in:
Proceedings of the 7th ACM SIGCHI Symposium on
Engineering Interactive Computing Systems. ACM, pp.
152–157.
Pope, A. T., Bogart, E. H., Bartolome, D. S., 1995.
Biocybernetic system evaluates indices of operator
engagement in automated task. Biol. Psychol. 40, 187–
195.
Pope, A. T., Stephens, C. L., Gilleade, K., 2014.
Biocybernetic Adaptation as Biofeedback Training
Method, in: Fairclough, S. H., Gilleade, K. (Eds.),
Advances in Physiological Computing, Human–
Computer Interaction Series. Springer London, pp.
91–115.
Prinzel III, L. J., Parasuraman, R., Freeman, F. G., Scerbo,
M. W., Mikulka, P.J., Pope, A.T., 2003. Three
experiments examining the use of electroencepha-
logram, event-related potentials, and heart-rate
variability for real-time human-centered adaptive
automation design.
Rahl, R. L., 2010. Physical activity and health guidelines.
Recomm. Var. Ages Fit. Levels Cond. From 57.
Rank, S., Lu, C., 2015. PhysSigTK: Enabling engagement
experiments with physiological signals for game
The Biocybernetic Loop Engine: An Integrated Tool for Creating Physiologically Adaptive Videogames
53

design, in: Affective Computing and Intelligent
Interaction (ACII), 2015 International Conference on.
IEEE, pp. 968–969.
Renard, Y., Lotte, F., Gibert, G., Congedo, M., Maby, E.,
Delannoy, V., Bertrand, O., Lécuyer, A., 2010.
OpenViBE: an open-source software platform to
design, test, and use brain-computer interfaces in real
and virtual environments. Presence Teleoperators
Virtual Environ. 19, 35–53.
Schulz, A., Vögele, C., 2015. Interoception and stress.
Front. Psychol. 6, 993.
Serbedzija, N. B., Fairclough, S.H., 2009. Biocybernetic
loop: From awareness to evolution, in: Evolutionary
Computation, 2009. CEC’09. IEEE Congress on.
IEEE, pp. 2063–2069.
Sinclair, J., Hingston, P., Masek, M., 2009. Exergame
development using the dual flow model, in:
Proceedings of the Sixth Australasian Conference on
Interactive Entertainment. ACM, p. 11.
Siriborvornratanakul, T., 2016. A Study of Virtual Reality
Headsets and Physiological Extension Possibilities, in:
International Conference on Computational Science
and Its Applications. Springer, pp. 497–508.
Stach, T., Graham, T. C., Yim, J., Rhodes, R.E., 2009.
Heart rate control of exercise video games, in:
Proceedings of Graphics Interface 2009. Canadian
Information Processing Society, pp. 125–132.
Tanaka, H., Monahan, K. D., Seals, D.R., 2001. Age-
predicted maximal heart rate revisited. J. Am. Coll.
Cardiol. 37, 153–156.
Verhulst, A., Yamaguchi, T., Richard, P., 2015.
Physiological-based Dynamic Difficulty Adaptation in
a Theragame for Children with Cerebral Palsy., in:
PhyCS. pp. 164–171.
Vourvopoulos, A., Cardona, J.E.M., Bermudez i Badia, S.,
2015. Optimizing motor imagery neurofeedback
through the use of multimodal immersive virtual
reality and motor priming, in: Virtual Rehabilitation
Proceedings (ICVR), 2015 International Conference
on. IEEE, pp. 228–234.
Vourvopoulos, A., Faria, A. L., Cameirão, M.S.,
Bermudez i Badia, S., 2013. RehabNet: A distributed
architecture for motor and cognitive neuro-
rehabilitation, in: 2013 IEEE 15th International
Conference on E-Health Networking, Applications
Services (Healthcom). pp. 454–459.
Yuksel, B. F., Oleson, K.B., Harrison, L., Peck, E.M.,
Afergan, D., Chang, R., Jacob, R.J., 2016. Learn piano
with BACh: An adaptive learning interface that adjusts
task difficulty based on brain state, in: Proceedings of
the 2016 CHI Conference on Human Factors in
Computing Systems. ACM, pp. 5372–5384.
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
54
