
Exploration of Unknown Map for Safety Purposes using Wheeled
Mobile Robots
Sara Ashry Mohammed
1,3
and Walid Gomaa
1,2
1
Cyber-Physical Systems Lab (CPS), Computer Science and Engineering Department (CSE),
Egypt-Japan University of Science and Technology (E-JUST), Alexandria, Egypt
2
Faculty of Engineering, Alexandria University, Alexandria, Egypt
3
Computers and Systems Department, Electronic Research Institute (ERI), Giza, Egypt
Keywords: Mobile Robots, Explore Unknown Map using Multi-robot, Rectilinear Obstacles, Gas and Fire Detection,
V-REP, Khepera III, Albers Algorithm, Zigzag Algorithm, Heuristic Backtracking SRT Algorithm.
Abstract: Exploring unknown 2-D grid map using multi-robots has a great significance in a vast domain of applications.
One possible application is to search for a gas leakage or a fire source which we address in this paper. We
propose an algorithm called Zigzag Ray for multi-robot exploration. The aim is to reduce the required time to
discover the environment as much as possible to suit the critical applications such as rescue operations.
Experiments are done using two, three, and four Khepera robots for exploring a map. The exploration time
without the boundary scan offset is ranged from 28.4% to 17.2% of the time taken by Albers algorithm and
from 41.2% to 30.7% of the time taken by the Zigzag algorithm for a single robot. Also, the time of four
robots by using a Zigzag algorithm for multi-robots is about 46% of Albers time of four robots. A disparity
in time existing between the algorithms shows the effectiveness of the new proposed algorithm. Additionally,
the Zigzag algorithm of a single robot is compared with the heuristic SRT algorithm. Zigzag time takes about
54.5% to 77.4% from heuristic SRT time. The evaluation is done using the Exploration Index strategy.
1 INTRODUCTION
Historically robots have been limited to industry,
where fixed manipulators were used for welding,
painting, assembly, product inspection, and testing.
Currently, robots are being used more for other
purposes. For instance, mobile robots have become
more present in our daily life; cleaning our flats,
mowing the lawn or searching for gas seepage or fire
in an unknown environment.
Robotic exploration algorithms grow because
they are crucial in many applications in this field.
Recently, looking for olfactory targets using mobile
robots has received a considerable interest because of
its importance in the detection of chemical seepage as
well as rescue and searching operations. Many studies
have been done in this field in (Marjovi et al., 2011),
(Soldan et al., 2014) and (Soares et al., 2016). Hiroshi
used chemical sensors as Noses for mobile robots
(Ishida et al., 2016). Multi- robots for odour source
localisation in an indoor map is presented by Wang
(Wang et al., 2016). A gas leak source detection with
mobile robots is introduced by (Martinez et al. 2014).
The motivation of this work is to give a
prototype of a robotic system that helps saving people
from fires and suffocation resulting from gas seepage.
Using a multi-robot in hard operations instead of
firefighters ensures the safety of their lives. Similarly,
it can also be applied in a smart home. It can be
essential for older whose abilities to move and to
sense gas seep are weak. This is not limited to only
the elderly, but also children who are left alone at
home sometimes. This application will have broader
prospects if it is applied as a protection factor
everywhere. Furthermore, the exploration time and
speed are the most significant factors in critical
applications.
This paper contributes a novel of exploration
algorithm using a multi-robot system. Robots
cooperate through a centralised PC station to explore
a map. The experiments are done on two, three, and
four robots. Also, the results are compared to both
Albers (Albers, 2002) and Zigzag algorithm of single-
robot (Ashry and Gomaa, 2016) to show the
effectiveness of the multi-robot exploration
algorithm, especially, in critical applications.
Mohammed, S. and Gomaa, W.
Exploration of Unknown Map for Safety Purposes using Wheeled Mobile Robots.
DOI: 10.5220/0006430903590367
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 359-367
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
359

Additionally, we compare Zigzag single robot with a
Heuristic SRT (Hussieny et al., 2015) algorithm.
Our paper organisation is as following: an
introduction is showed in section 1, after that the
related work is mentioned in Section 2, Section 3 is
discussing the background. Section 4 describes the
zigzag algorithm of multi-robots. Section 5 shows the
experiments in both a real world and simulation.
Section 6 concludes this paper.
2 RELATED WORK
The majority of the multi-robot exploration
algorithms have relied on using the concept of
frontier cells. The frontier-based exploration was
initially introduced by (Yamauchi, 1997) where each
grid cell in a 2-D map has a numeric value that shows
the existence of objects in the map.
Additionally, (Yamauchi, 1998) contended that to
find out the map; each robot moves towards the
nearest free frontier cell, and at least one of its
neighbouring cells is unexplored. The challenge is
how to choose the best frontier cell if more than one
robot is included in the exploration, it is important to
avoid the situation where two robots move to the cell
itself. Nevertheless, He considered that it is probable
that more than one robot move to explore the same
frontier and then more time is required to accomplish
the task. A more advanced technique where the robots
start at a known initial points is suggested by Burgard
(Burgard et al., 2005). The aim is to minimise the
whole time by choosing proper frontier cells for each
robot so that they explore different parts of the map
and the overlap between them is reduced.
(Sheng et al., 2006) considered that a limitation
communication range between the robots is a great
problem. In all of the mentioned research, the robot
senses the neighbouring cells using laser range
sensors. But, what if laser sensors aren’t available or
expensive. So, the proposed algorithm is suitable.
3 BACKGROUND
3.1 Albers Algorithm
Albers supposed that the robot starts at a corner point
and moves along the external border of a rectilinear
map in a clockwise direction until it backs to its origin
again. So, the robot could know the map dimension
and determine the lower segment. Then, it moves up
in a northern ray until hitting the boundary.
The robot then goes south on the same column and
takes one step east and radiate another northern ray in
a recursive operation till hitting the exterior boundary
or an obstacle. If the up ray hits an obstacle, then the
robot follows obstacle exploring process as described
in (Ashry and Gomaa, 2016). Albers algorithm is
shown in figure 1.
Figure 1: Shows Albers algorithm (Ashry, Gomaa, 2016).
3.2 Heuristic SRT Algorithm
Heuristic SRT algorithm is one of the randomised
motion exploring approaches. Robots are directed to
gain information through random steps. Those steps
should validate certain conditions to maximise the
acquired information and cover the entire map. While
random techniques have been used intensively for the
exploration, they are not efficient for the time critical
applications since the robot may visit the place itself
more than once during the backtrack operation like
(SRT) Sensor Random Tree (Oriolo et al., 2004).
(Hussieny et al., 2015) suggested a Heuristic SRT to
solve the backtracking problem to find a new frontier
cell. It reduced the exploration time to 30 % and 28
% respectively from basic SRT as shown in figure 2.
Figure 2: Left figure shows the basic SRT and right figure
shows heuristic backtracking algorithm, where a green line
(shortest path A*) is planned to the most informative node
and then the exploration process starts again. The robot
equipped with 360
o
laser finder (Hussieny et al., 2015).
3.3 Zigzag Algorithm of Single Robot
The problem of Albers algorithm is that the robot
moves on the same column twice because it goes up
and down on the same line to hit the lower segment.
Hence, this algorithm doubles the time of exploration.
The Zigzag algorithm proposed an enhancement of
this drawback. The robot radiates a ray to the north,
and then move one step in the east and emit a ray in
the southern direction of the next column
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
360

(up/east/down/east) (Ashry and Gomaa, 2016). It
does not reverse again on the same column like
Albers algorithm. If it faces an obstacle, it will follow
obstacle exploring process as in figure 3.
Figure 3: Shows Zigzag Ray lines, lower /upper segments.
4 ZIGZAG MULTI-ROBOTS
Zigzag of multi robots algorithm is proposed to
enhance the performance of zigzag of a single robot.
The experiments at section 5 show the effectiveness
of this algorithm compared to Albers and zigzag
(Ashry and Gomaa, 2016). The following algorithm
steps explain the zigzag of multi-robots on two robots
to illustrate the concept. Sure, the same algorithm can
be applied on multi-robots (3, 4, and so on). The PC
works as a centralised station, and the robots work
through a client to server’s network.
Figure 4: Shows the zigzag algorithm for multi-robots.
Protocol
Figure 5: The protocol between the client and servers.
PC centralised station:
1. Initialize a connection between the PC as a client
and each robot as a server.
2. The PC asks each robot in the initial state to adjust
its direction till the left sensor is occupied and it will
receive the position and direction of robots during the
boundary scan process.
3. After the PC has the exterior boundary, it will apply
the divide map process which divides the whole map
into small areas equals to the robots number. Then, it
sends small maps to each robot.
4. The PC receives information from each robot about
visited cells and obstacles and update the map.
5. If the PC receives information from any robot that
there is a common obstacle, the “Common Obstacle
process” will apply.
6. During exploring, each robot applies Collision
Avoidance technique at each node.
Robots as servers:
1. At the initial state, if we have two robots, the first
robot will be put at any corner with any direction
(north or east or west or south), and the second robot
will be placed at any point on the exterior boundary
of the map at any direction.
2. Each robot starts to adjust its direction till the left
sensor becomes occupied.
Exploration of Unknown Map for Safety Purposes using Wheeled Mobile Robots
361

3. The first robot starts to apply the Boundary scan
process. It moves on the exterior boundary in a
clockwise direction until it faces the second robot.
Then, it will stop and send the position and
orientation of the second robot to the station.
4. The second robot will continue exploring the
exterior boundary till it finishes it. So, the map
dimension is known. The boundary scan process
occurs at the first execution of the algorithm in the
map, but after that, it is executed without this step.
5. After the PC divided the map, each robot receives
information of a small map that should be explored,
and it starts exploring from the first column in its area.
6. If a small map does not contain any obstacles, then
each robot will apply the same concept of a zigzag ray
of the single robot (Ashry and Gomaa, 2016). But, if
there is any common obstacle between two regions,
the robot will use common obstacle method.
7. After each robot completes exploring its area, it
will park at any corner on its map boundary.
Divide Map process:
This pattern for the robots number (N = 2 or 3 or 4).
If N = 2, then split the large length (LL) by two as
shown in figure 6. If N= 3, then divide LL by 3. If N
= 4, then divide LL by 2 and cutting the large width
by 2.There are general algorithms for dividing a map
into small equal maps (Shermer, 1992).
(a)Divide map to 2 small areas. (b) Divide map to 3 small areas
(c) Divide map to 4 small areas.
Figure 6: The pattern of dividing map to 2, 3, and 4 areas.
Common Obstacle:
This method is applied when there is a common
obstacle between the areas. There are two cases:
Collision Avoidance Technique:
Each robot checks if any robot exists in its circle using
ultrasonic sensors as shown in figure 7. The circle
radius equalises to the edge length. If a robot detects
any other robot in its circle, then the robots will stop
and send to the station for taking the decision about
which one should move and which one has to stop and
wait until no other robot is detected on its circle. The
PC chooses any robot randomly to move and ask the
others to wait. Then, all robots will check ultrasonic
again at each node.
Figure 7: Shows the divided small maps virtually and the
circle area indicates the collision avoidance technique.
5 EXPERIMENTS
5.1 V-Rep Simulation
V-REP is used for developing algorithms and check
verification (Rohmer et al., 2013).
5.1.1 Comparing the Results of Zigzag
Algorithms towards Albers for Single
Robot
Experiments are done on V-REP to prove the
efficiency of the new Zigzag multi-robot vs. Albers
algorithm and the zigzag of a single robot. The
environments consist of M obstacles, N robots.
Figure 8: Left figure shows 4 robots on a map with one
obstacle. Middle figure shows them on map with two
obstacles. But, left shows them on a map with 3 obstacles.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
362

(a)Test1, 1obstacle in
map7*7.
(b) Test2, 2obstacle in
map8*8.
(c) Test3, No Obstacle in
map8*8.
(d) Test4, 3obstacle in map
9*9.
(e) Test5, 5 obstacles in map 19*39.
Figure 9: Charts of v-rep experiments shows the efficiency
of exploration time of the proposed algorithm.
Figure 10: It shows the exploration time at V-REP without
a boundary scan time, so, the speedup by 4 robots ranged
from 71% to 85%.
5.1.2 Comparing the Results of Zigzag
Multi-robots versus Albers
Multi-robots
We applied the same concept of a Zigzag algorithm
for multi robots, as explained in section 4, to Albers
algorithm to make a fair comparison. So, Albers is
tested on 2 robots and 4 robots. They are tested on the
same maps at test 1, 2, 3 and 4. Figure 11 shows the
result of this comparison.
Figure 11: It shows the exploration time of Albers vs.
Zigzag multi-robot at the V-REP without boundary offset
when each robot knows its start position and orientation.
The speed up percentage ranged from 33% to 50.5%.
5.1.3 Albers and Zigzag on a Rectilinear
Map
The experiments are also done on a rectilinear map
to show another environments type.
Figure 12: It shows experiments on a rectilinear map.
Albers with 2 robots on the left figure while Zigzag with 4
robots on the right figure.
Figure 13: It shows the exploration time of Albers vs.
Zigzag on a rectilinear map without boundary offset. The
speed-up percentage for 1, 2, and 4 robots ranged from 37%
to 42.5%. Additionally, using the Zigzag on 4 robots save
82.76% of the Albert time of single robot.
5.2 Controlled Real World
Experiments
The Experiments are done in a controlled
environment with 6*6 nodes and surrounded by a
wooden and cartoon panels as walls. Figure 14 shows
a snapshot from the experiments. Also, figure 15
shows the time of Albert, Zigzag on a single robot,
Exploration of Unknown Map for Safety Purposes using Wheeled Mobile Robots
363
and Zigzag for multi-robot at 2, 3, and 4 robots on a
map with zero, one and two obstacles.
Figure 14: A snapshot from the controlled environment on
the real world of map consist of 6*6 nodes.
Figure 15: It shows the real world experiments without the
boundary time offset. So, the speed-up percentage by using
the Zigzag to Albers approach, for 4 robots ranged from
85% to 89%.
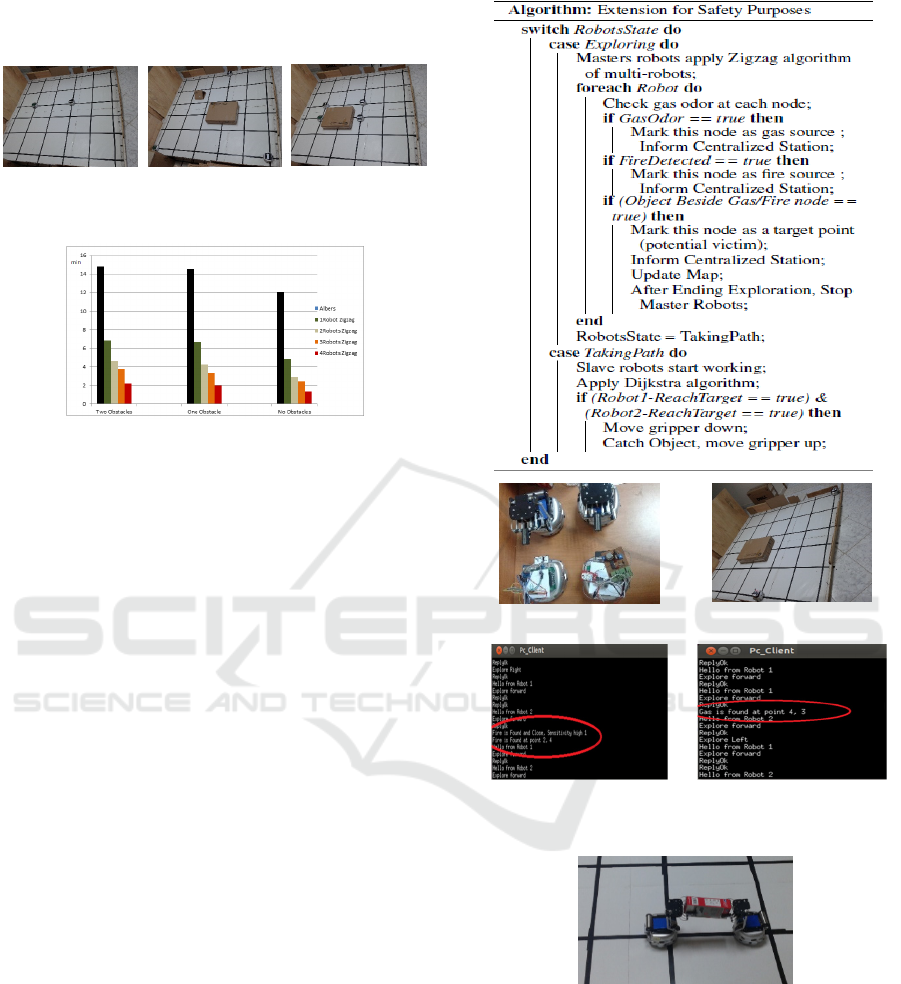
5.3 Searching for Gas or Fire using
Multi-robots
We extended the application of searching for gas
source using one master robot (Ashry, 2016). The
extension includes searching for gas or a fire source
using multi-robots for saving people from gas
suffocations and fires. The master robots apply the
proposed exploration algorithm of Zigzag multi-
robots. Experiments are done on two master robots
equipped with high sensitive gas and flame sensors as
and two slave robots equipped with a gripper to
capture the potential victim by taking the Dijkstra’s
algorithm as shown in figure 16. The candle is used
as a fire source. The sensor module name is MQ-6. It
is sensitive to butane, propane, and natural gas.
After the exploration process and detecting the
target, the map and the target point (object found
beside gas/fire node) are sent to the two slave robots
(R2, R3) by a centralised station. Slaves receive the
map information, and they take the Dijkstra’s shortest
path algorithm to the target point. They equipped with
grippers to capture the object. R3 took the same route
of R2 as it is the shortest one, but its path was
increased with last steps to face R2. To avoid the
collision between robots, R2 precedes R3 with an
edge. R2 checks are arriving of R3 with front
ultrasound sensors. Then, the robots catch the object
as shown in figure 17. The following algorithm
illustrates the approach for safety purposes.
(a)Khepera III robots.
(b) Experiment in the real
world.
(c) Fire detection. (d) Gas detection.
Figure 16: Gas or fire source detection in the system.
Figure 17: The slaves with the gripper on face to face.
5.4 Comparing the Results of Zigzag
Algorithm towards Heuristic SRT
for Single Robot
Haitham proposed a heuristic SRT backtracking as an
enhancement of the basic SRT exploration algorithm
while the robot reaches valuable nodes instead of
backtracking all the previous as in the basic sensor-
based techniques (Hussieny et al., 2015).
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
364

The contribution of this approach is the selection
of a valuable node. It is done with the help of the ray-
casting algorithm that estimates the number of cells
to be explored. The robot is equipped with 360
o
laser
range finder. It starts by choosing any node to explore
randomly depending on a sensor reading such that not
to choose an obstacle node or a node visited before. If
the robot reaches a close area, it chooses the nearest
node by calculating a heuristic function, and it will
take the A* path to it.
We compare the result of the heuristic SRT
backtracking with a zigzag algorithm for a single
robot. Considering the limitation of Khepera III robot
capabilities, we use infrared sensors instead of laser
range sensor. The robot can move in 4 directions (N,
S, E, and W) directions. The experiments are done on
a 2-D grid map on V-REP simulation as shown in
Figures 18, 19 and 20.
(a) Heuristic SRT.
(b) Zigzag on the map with
1 obstacle.
Figure 18: Shows the result of heuristic backtracking SRT
and zigzag algorithm on 9*9 map with one obstacle.
Figure 19: It shows the result of simulation on a rectilinear
map with 4 obstacles between heuristic SRT on the left
figure and zigzag on the right figure using a single robot.
Figure 20: The result of comparison between heuristic SRT
and zigzag algorithm of a single robot.
6 EVALUATION
There is a trade-off between the metrics evaluating
the exploration approach performance like distance,
time and area completeness percentage which
comesover the exploration cost. A single
“ExplorationIndex” is used to judge the performance
of differentexploration strategies (Hussieny et al.,
2015).
EI is directly proportional to the completeness C,
and is inversely proportional to the exploration
time(ET) and the travelled distance (TD), and the
normalised number of nodes (F). The larger the
values of this index, the better the performance of a
strategy. The index is defined by equation 1.
∗
∗
∗
∗
∗
∗
(1)
Where F = N-
tot
/ N
actual visited
and Wc, W
t
, W
d
and W
f
are the proportional weights added to measure the
contribution of each factor to a metric. Different
environments were tested to show a high Exploration
index (EI) as shown in figure 21. Assume W
c
= W
t
=
W
d
= W
f
= W in equation 1.
Table 1: Shows the EI of Zigzag and heuristic SRT.
Test C ET(min) TD(m) F EI
T1:Zigzag 1 10.33 42 1 2.3*10
-3
T1: SRT 1 13.25 56 1 1.3*10
-3
T2:Zigzag 1 8 40 1 3.1*10
-3
T2: SRT 1 14.3 58 1 1.2*10
-3
T3:Zigzag 1 22 70.5 1 6.5*10
-4
T4: SRT 0.97 32 83 1.03 3.5*10
-4
Figure 21: Chart the EI of Zigzag and heuristic SRT.
We evaluate the Zigzag Algorithms vs. Albers by
measuring the exploration time on different case
studies on an experimental work and calculating the
tight bound time complexity for each algorithm as
shown in Table 2 where ϴ is the tight bound function,
n is number of nodes in a column, Obstacles (n) is
function determines total complexity for all obstacles
and C is a constant which include nodes hidden inside
obstacles to remove them from the calculation.
Exploration of Unknown Map for Safety Purposes using Wheeled Mobile Robots
365

Table 2: Shows the tight bound complexity of Albers VS.
Zigzag algorithm for single and multi-robots.
Algorithm Tight bound time complexity
Albers single robot ϴ ((2 n
2
+ 5n) + Obstacles (n) - C)
Zigzag single robot ϴ ((n
2
– n -2) + Obstacles (n) - C)
Albers multi-robots
ϴ ((4n +(
) +n ) + Obstacles(n) - C)
Zigzag multi-robots
ϴ ((
) + (n-2)+ Obstacles(n) - C)
7 CONCLUSION
The paper proposes an algorithm for exploring
unknown grid map using a centralised multi-robot
system called Zigzag Multi-robots for safety
purposes. If the map is large, and the common
obstacles are minimum, the exploration time of 4
robots on a rectilinear map is equal to 0.172 of Albers
time. Nevertheless, in the worst case, when there are
common obstacles, the time of 4 robots in the map is
equal to 0.284 of Albers time. Also, we used this
algorithm as a part of the combined approach for the
gas/ fire searching using two robots as masters and
two robots as slaves to hold the potential victim.
Additionally, we compare Zigzag with heuristic SRT,
and we measure the evaluation index where the
higher the EI, the better performance of the algorithm.
In future work, we will apply Zigzag multi-robots
algorithm on a decentralised system in bigger maps
with 8 and 16 robots and compare the results with an
extension for heuristic SRT multi-robots approach.
ACKNOWLEDGMENTS
The author would like to thank Dr. Mohammed
Hamdy from Fayoum University, Dr. Reda El-
Bssuieny, Dr. Haitham El-Hussieny from Banha
University and Dr.Alaa sheta from ERI. The first
author is supported by a scholarship from the Egypt
Scientific Research which is gratefully thankful.
REFERENCES
A. Marjovi and L. Marques. (2011). "Multi-robot olfactory
search in structured environments”. Robotics and
Autonomous Systems, (pp. 867–881, no. 11.).
Ashry, S., & Gomaa, W. (2016). "Exploration Of Unknown
Map For Gas Searching And Picking Up Objects Using
Khepera Mobile Robots". the 13th International
Conference on Informatics in Control, Automation and
Robotics (pp. 294 – 302. (Vol 2)). In Portugal,July 29-
31: ICINCO.
B.Yamauchi. ( 1998). “Frontier-based exploration using
multiple robots”. in Proceedings of the 2th
international conference on Autonomous agents. ACM,,
(pp. 47–53).
B.Yamauchi. (1997). “A frontier-based approach for
autonomous exploration”. In Computational
Intelligence in Robotics and Automation (pp. 146–151).
IEEE, 1997.
D. Martinez, T. Pallej`a, J. Moreno, M. Tresanchez, M.
Teixid´o, D. Font, A. Pardo, S. Marco, and J. Palac´ın.
(2014). “A mobile robot agent for gas leak source
detection”. In Trends in Practical Applications of
Heterogeneous Multi-Agent Systems (pp. 19–25). The
PAAMS Collection. Springer, 2014.
E.W.Dijkstra. (1959). " A note on two problems in
connexion with graphs. Numerische mathematik". 269–
271, vol 1.
G. Oriolo, M. Vendittelli, L. Freda, and G. Troso. (2004).
“The srt method: Randomized strategies for
exploration”. In Proceeding of IEEE International
Conference on Robotics and Automation (pp. 4688–
4694, vol. 5). ICRA.
H. Ishida, A. J. Lilienthal, H. Matsukura, V. H. Bennetts,
and E. Schaffernicht. (2016). “Using chemical sensors
as noses for mobile robots”. Essentials of Machine
Olfaction and Taste, (pp. 219–245).
Haitham El-Hussieny, Samy Assal, and Mohamed
Abdellatif. (2015, Apr 1). "Robotic exploration: new
heuristic backtracking algorithm, performance
evaluation and complexity metric". International
Journal of Advanced Robotic Systems, 12(4), p.33.
J. M. Soares, A. Marjovi, J. Giezendanner, A. Kodiyan, A.
P. Aguiar, A. M. Pascoal, and A. Martinoli. (2016).
“Towards 3-d distributed odour source localisation: an
extended graph-based formation control algorithm for
plume tracking”. In Intelligent Robots and Systems
(IROS) (pp. 1729–1736). IEEE/RSJ International
Conference.
M. Turduev, G. Cabrita, M. Kırtay, V. Gazi, and L.
Marques. (2014). “Experimental studies on chemical
concentration map building by a multi-robot system
using bio-inspired algorithms”. Autonomous agents and
multi-agent systems, (pp. 72–100, vol. 28, no. 1).
S. Albers, K. Kursawe, and S. Schuierer. (2002).
“Exploring unknown environments with obstacles”.
Algorithmica, vol. 32, pp. 123–143.
S. Soldan, J. Welle, T. Barz, A. Kroll, and D. Schulz.
(2014). “Towards autonomous robotic systems for
remote gas leak detection and localization in industrial
environments”. In Field and Service Robotics (pp. 233–
247). Springer, 2014.
Shermer, T. C. (1992). “A linear algorithm for bisecting a
polygon”. Information processing letters, (pp. 135–
140, vol. 41, no. 3.).
W. Wang, M. Cao, S. Ma, C. Ren, X. Zhu, and H. Lu.
(2016). “Multi-robot odor source search based on
cuckoo search algorithm in ventilated indoor
environment”. n Intelligent Control and Automation
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
366

(WCICA), 12th World Congress (pp. 1496–1501).
IEEE, 2016.
W.Burgard, M.Moors, C.Stachniss, and F.E.Schneider.
(2005). “Coordinated multi-robot exploration”.
Robotics, (pp. 376–386, vol. 21, no. 3).
W.Sheng, Q.Yang, J.Tan, and N.Xi. (2006). “Distributed
multi-robot coordination in area exploration”. Robotics
and Autonomous Systems, (pp. 945–955, vol. 54, no.
12).
Rohmer, E., Singh, S. P., and Freese, M. (2013). V-rep: A
versatile and scalable robot simulation framework. pp.
1321–1326.
Exploration of Unknown Map for Safety Purposes using Wheeled Mobile Robots
367
