
Multi-objective Order Reduction Problem Solving with Restart
Meta-heuristic Implementation
Ivan Ryzhikov, Christina Brester and Eugene Semenkin
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University, Krasnoyarsk, Russia
Keywords: Linear Time Invariant Systems, System Identification, Order Reduction, Multi-objective Optimization,
Evolution-based Algorithms, Meta-heuristic, Restart Operator.
Abstract: An order reduction problem for linear time invariant models brought to the multi-objective optimization
problem is considered. Each criterion is multi-extremum and complex, requires an efficient tool for estimating
the parameters of the lower order system and characterizes the model adequacy for the unit-step and Dirac
function inputs. A common problem definition is to estimate the lower order model coefficients by minimizing
the distance between the output of this model and the initial one. We propose an evolution-based multi-
objective stochastic optimization algorithm with a restart operator implemented. The algorithm performance
was estimated on two order reduction problems for a single input-single output system and a multiple input-
multiple output one. The effectiveness of the algorithm increased sufficiently after implementing a meta-
heuristic restart operator. It is shown that the proposed approach is comparable to other approaches, but allows
a Pareto-front approximation to be found and not just a single solution.
1 INTRODUCTION
The idea of reducing an identification problem to a
black-box optimization problem (BBOP) is
considered in this study. The initial identification
problem is to estimate the parameters of the linear
time-invariant (LTI) system of the lower order with
the aim of making its behaviour close to the behaviour
of the higher order model. In many different studies
(Narwal et al., 2016), (Desai et al., 2014) and
(Ramesh et al., 2011) the approaches and therefore
the models are compared by several criteria, but the
model parameters were identified by one of them and
so the others are indicative. Commonly, these criteria
are based on the sum of the output errors, where the
output is a reaction on the unit-step or Dirac function
input. Generally, these criteria form a non-dominated
set of the identification problem solutions, and that is
why the estimation of the lower order parameters
leads to a multi-objective (MO) optimization
problem. In this case, the proposed problem definition
is a generalization of the LTI identification problem.
The BBOP appearing in system identification is a
complex multimodal problem. Recent works on the
LTI order reduction problem are based on a
combination of stochastic nature-inspired
optimization algorithms and methods of providing
stability, i.e. (Chen et al., 1979), and its first
combination with an optimization technique was
initially given in (Parmar et al., 2007). Nature-
inspired stochastic optimization algorithms are used
to solve reduced optimization problems: a genetic
algorithm (Ramesh et al., 2011), Big Bang Big
Crunch (Desai et al., 2014) and Cuckoo Search
Optimization (Narwal et al., 2016). The comparison
made in these works proves that heuristic
optimization is an efficient tool for solving an
extremum seeking problem of this class. Solving the
described MO optimization problem also requires an
efficient tool, which is used to estimate not only the
best solution by each of the criteria, thus dealing with
multimodality and complexity, but also the Pareto set.
As the main optimization algorithm, PICEA-g
was used. This algorithm was improved by
implementing a meta-heuristic, the aim of which is to
avoid stagnation areas and improve the search by
controlling the initial generation randomization. The
main idea of the restart operator is given and
developed in studies (Fukunaga, 1998) and
(Beligiannis et. al., 2004), but was sufficiently
modified in (Ryzhikov and Semenkin, 2017), where
it was applied for a single-criterion optimization
problem and in the current study it was modified for
270
Ryzhikov, I., Brester, C. and Semenkin, E.
Multi-objective Order Reduction Problem Solving with Restart Meta-heuristic Implementation.
DOI: 10.5220/0006431002700278
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 270-278
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

solving MO problems. For this purpose, the main
restart criteria were modified and the process of
gathering information for the optimization problem is
related to other statistics. This data is used to improve
the efficiency of the Pareto estimation algorithm and
to perform the final Pareto set estimation.
The proposed approach is based on asymptotic
equivalence (Ryzhikov et al., 2017), so the lower
order model output integral square errors are always
convergent. The stability of the dynamical system
model is provided by including a penalty function in
the criteria. Determining the solution in this way
increases the dimension of the search variable space
by one for each system output. This approach was
compared to other approaches on the same problem
set and with the same number of objective function
evaluations for solving the LTI order reduction
problem for single-input single-output (SISO)
systems and multiple-input multiple-output (MIMO)
systems.
The rest of the paper is organized as follows: in
Section II the order reduction problem is presented.
The restart meta-heuristic and MO evolution-based
algorithm are introduced in Section III. The
experiments conducted and the results obtained are
included in Section IV. The conclusions are presented
in Section V.
2 ORDER REDUCTION
PROBLEM STATEMENT
The SISO LTI system model is determined by the
following linear differential equation
00
nm
ii
ii
ii
ax t bu t
,
(1)
where
,1,
i
aRi n
and
,1,
i
bRi m
are the
model parameters,
:nn m
is the equation order,
0,t
is the time variable,
i
x
t
is the i -th
derivative of the output,
i
ut
is the
i
-th derivative
of the control input.
In this study we consider the case
0
0xt
, so
after using the Laplace transformation, the model can
be represented with a transfer function
00
mn
j
i
ji
ji
Gs b s a s
.
(2)
The MIMO LTI system is determined by the
following matrix equations,
d
X
tAXtBUt
dt
,
Yt CXt DUt
,
(3)
where
:0
o
N
Yt R R
is the output function,
o
N
is the number of outputs,
:0
c
N
Ut R R
is the input function,
c
N
is the number of inputs,
:0
s
N
X
tR R
is the space variable, the
system matrix
s
s
NN
AR
, the control matrix
s
c
NN
B
R
, the output matrix
os
N
N
CR
and the
feed-forward matrix
oc
NN
DR
.
In this paper, we consider the MIMO system with
two inputs and two outputs, thus, its transient
function, which is determined by the equation
1
s
Ws CsI A BD
can be represented
with the expression
1,1 1,2
2,1 2,2
s
WsW s
Ws
WsWs
,
(4)
where
,,,ij ij ij
WsDsNs
, and
,,
,
ij ij
DN,
,1,2ij , are the denominator and nominator,
respectively. Factoring out the denominator gives
1,1 1,2
2,1 2,2
1
ss
s
ss
s
Ns Ns
Ws
NsNs
Ds
,
,
,
ij
s
ij
D
sDs
,
,, ,
,
pq pq i j
s
ij
ipjq
NsNs Ds
.
(5)
To provide the convergence of integral errors, the
asymptotical equivalence approach is used (hidden
reference 2), where the higher and lower order model
output equivalence is guaranteed by the limit
equivalence of the fraction of parameters
0
0
lim
s
t
b
axt
a
,
(6)
where the coefficients
0
a
and
0
b
are given in (1) and
known. This means that the first one could calculate
the initial model (system) output asymptote
s
a
, and
on the basis of this determinate the parameters of the
lower order model using the formula (6).
Since our aim is to approximate the initial model
with the lower order model, we need to estimate the
parameters of the 2
nd
order model which is
determined by the following transfer function
Multi-objective Order Reduction Problem Solving with Restart Meta-heuristic Implementation
271

21
2
01
,
s
m
psa p
Gsp
s
ps p
,
(7)
for the SISO systems and
1,1 1,2
2,1 2,2
1
,
mm
m
m
mm
NN
Gsp
D
NN
,
2
01
,
m
Dsp s psp
,
,
1
12 1 2 1
,
ij s
m
ij ij
Nspp sa p
,
(8)
for the MIMO systems.
Now to provide the 2
nd
order model stability we
require the following condition
00
00pp ,
(9)
where the parameter comes from (7) or (8).
We want the model with the reduced order to be
an adequate estimation of the LTI system, so its
response needs to be close to the response of the
model with the higher order on the same control input
ut
. The response is a function on a time domain
and for both models it can be found by solving the
Cauchy problem for (2) and (7) or (4) and (8). Since
we consider the unit-step and the Dirac functions as
inputs, the output can be expressed via the inverse
Laplace transformation:
1
(, ) ,
um
x
tp L G sp Lut
,
1
ˆ
()
u
x
tLGsLut
,
(10)
for the SISO LTI systems and
,
,1
,
,
,
ij
m
ij
u
m
NspLut
xtp L
Dsp
,
,
,1
ˆ
ij
s
ij
u
s
NsLut
xt L
Ds
,
(11)
for the MIMO LTI systems. Using expressions (10)
and (11) to calculate the responses of the models on
different input functions, one can identify parameters
as the solution of the extremum problem
2
0
ˆ
,
N
u
siso u i u i
i
C p xt xtp
,
3
min
u
siso
p
R
Cp
.
(12)
for the SISO system or
2
,,
,0
ˆ
,
N
uijij
mimo u k u k
ijk
Cp xtxtp
,
(13)
2
min
N
s
u
mimo
pR
Cp
,
for the MIMO system. In criteria (12) and (13) the
values
,1,
i
tTiNi N are the time points,
T
is
the final time and
N
is the number of points.
In this study, a penalty function is used to
implement the stability condition (9) into the criteria
(12) and (13). The modified criteria are as follows,
3
0
min
uu
siso siso
p
R
CpC с Pp
,
(14)
2
0
min ,
N
s
uu
mimo mimo
pR
CpCpс Pp
(15)
where
:0PRR
is a static penalty
function
0, 0
,0
x
Px
xx
and
0с
is a
coefficient.
To analyse the solution adequacy on the whole
time domain three more criteria are used. These
criteria are involved in comparing the efficiency of
the approaches. Let
*
ˆ
,,
x
txtpxt
be the
solutions of (10) or (11), the input is the unit-step
function
ut t
and
*
arg min
siso
p
Cp
or
*
arg min
mimo
pCp
, depending on the problem.
The first criterion we want to calculate is the integral
square error
2
1
0
ˆ
() ()Ixtxtdt
,
(16)
Its estimation was used to identify the parameters via
solving problems (14) or (15). The integral (16) is
divergent if
ˆ
lim lim
tt
x
txt
, and for this
reason the function (6) is implemented and the
stability condition is required.
The next criteria concern the relative integral
square error; they are given in (Parmar and Prasad,
2007) and are proposed in order to check the accuracy
of the model. Both criteria are expressed with by
fraction:
2
0
2
2
0
ˆ
x
txtdt
I
x
tx dt
,
(17)
and the second is for the input
ut t
,
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
272

2
0
3
2
0
ˆ
x
txtdt
I
xt dt
.
(18)
The result of the inverse Laplace transformation (10)
and (11) can be found symbolically for the current
problems, where the initial and reduced order models
are linear.
3 RESTART META-HEURISTIC
AND PICEA-G
The optimization problem considered in this study
can be represented in a following way:
:,dim
m
A
Ca A C R A n
,
1
...
m
aA
Ca С a С a extrem
,
(19)
where
A
is a space of alternatives with dimension
n
,
A
C
is a subspace of some Euclidean vector space
m
R
,
1, : : ,
i
iAjA
j
imС AC R С AC
are
the unknown mappings. After the problem
formulation and the determination of the
identification parameters, we can use a bijection
between alternatives and binary strings, so every
alternative can be determined with a real value vector
and thus a binary string. Generally, the criteria (19)
are computable functions or mappings with unknown
properties and unknown symbolic form.
For solving MO BBOP we propose using the
PICEA-G algorithm, which is population-based.
Each population is a set of different solutions – a set
of alternatives and our aim is to approximate the
Pareto front. In this case, there is a contradiction
between the need for an in depth search to improve
current solutions and for a search in breadth to
approximate the whole front.
To resolve this contradiction we put forward a
hypothesis that restarting the Pareto front estimation
algorithm improves the population-based
optimization algorithm efficiency. This is why an
independent restarting operator meta-heuristic was
designed and implemented. The proposed meta-
heuristic estimates if the stagnation condition is met
and evaluates the parameters for the randomized
performing of the initial generation. The stagnation
estimation is based on the distances between the
Pareto front estimations, which are taken at the
current generation and the previous one and consist
only of non-dominated individuals. If the distance
does not change for a given number of generations,
the MO optimization algorithm restarts. A more
detailed explanation is given below.
Let the population in the
i -th generation be noted
as
i
P . For each algorithm generation a set
:, : ,
С
ij kj k
jk jk
SaAkijkSaaa S
and a set
,
ijji
F
Ca a S
are formed. These sets
are the Pareto set and front estimations at the
i
-th
generation, respectively. It is easy to see that
1ii i
iS S P
, so the distance
1
,
ii
F
F
between
two different sets
i
F
and
1i
F
is calculated for the
non-dominated solutions found in the current
generation. Let
F
be a set of any limited cardinality
,1,
m
i
F
fRi F
, then
,: 0,
ab
FF F F R
1
1
,min
a
m
b
F
ab a b
ij
jF
R
i
a
FF F F
F
,
(20)
where
:0
m
m
R
RR
is a norm on the
m
R
vector space.
The decision of whether to perform a restart or not
is made on the basis of the specific variable value.
This variable is the diameter of a set, which is a queue
that consists of the metric values of the previous
iterations. Let the number of iterations be noted as
tail
l , then the set is determined in the following way
1
,:
i tail j j tail
Tail l F F i l j i
,
(21)
and the meta-heuristic performs the restart if the
following condition
max min
tail
tail
i i tail
jl
jl
Tail j Tail j
,
(22)
is met. As can be seen from equations (21) and (22),
two different operator settings are used: the tail length
tail
l controls the size of the observation period and
tail
is a threshold level.
Now, if the restart takes place, we collect the
current algorithm run data and put it into the sets to
gather information about the MO optimization
problem and algorithm’s behaviour to provide its
control with the meta-heuristic. In this case, we need
the estimations of the Pareto front and Pareto set, the
last generation population and its criteria values.
These sets are used for performing the final solution
Multi-objective Order Reduction Problem Solving with Restart Meta-heuristic Implementation
273

and initial generation population of the next algorithm
run:
SSi
M
emory Memory S
,
F
Fi
M
emory Memory F
,
P
Pi
M
emory Memory P
,
CCi
M
emory Memory C
,
where
:,1,
ijji i
j
CFcc Pj P
.
The generation of the initial population is an
important feature of the meta-heuristic and it directly
influences the algorithm’s performance. This
generation is controlled by two parameters: the
probability of each individual in this initial population
being randomly generated -
, and the probability of
each gene of the individual being changed to the
opposite -
, in the case of the individual not being
randomly generated. Each
j
-th individual can be
generated by one of the proposed schemes and it
means that its
k
-th gene in the initial population is
generated in one of the following ways:
0,, ,
,0 1
jk jk jk
j
k
P r Pr Pr,
(23)
with the probability
and with the probability
1
:
1
2
3
0,
,
j
j
cSjk
jr
k
r
PfMemoryr
,
(24)
where
k
is the index of a gene,
,0
,
,1
c
vp
fvp
vp
is a special function and
1
j
r
,
2
j
r
,
3
,
j
k
r
are the random
values:
11
1...
jjS
Pr Pr Memory
,
1
22
1 ...
j
jjS
r
Pr Pr Memory
,
33
,,
01 1
jk jk
Pr Pr
.
By varying parameters
and
we control the initial
population generation. If we want the initial
population to be completely randomized, we set
to
1, and if we want it to be in a some sense near to some
previously estimated Pareto set solutions, we set it
closer to 0 and
closer to 0 too, where
represents
the closeness of the new individual to a found one.
In our study, the restart meta-heuristic is
incorporated into the Preference-inspired Co-
evolutionary Algorithm using goal vectors (PICEA-
g) proposed by Wang in 2013 (Wang, 2013). This
algorithm relates to a class of preference-inspired co-
evolutionary algorithms (PICEAs) which are based
on the concept of co-evolving the population with
decision-maker preferences.
PICEA-g includes the following steps:
1.
Generate an initial population and evaluate
objective values for individuals. Find non-
dominated candidate solutions in the population
and copy them into the archive. Determine the set
of goal vectors as a number of targets randomly
generated within the goal vector bounds.
2.
Produce the offspring solutions with genetic
operators: selection, crossover and mutation.
Evaluate objective values for new generated
individuals.
3.
Pool together parents and children; compile the
common set of objective values.
4.
Append to the set of goal vectors the additional
targets generated within the determined bounds.
5.
Assign fitness values for goal vectors and for
individuals in the united population.
6.
Form the new population and the set of goal
vectors based on their fitness.
7.
Update the archive with new non-dominated
solutions.
8.
Check the stopping criterion: if it is satisfied then
finish the search with the archive set, otherwise
proceed with the second step.
In Steps 1 and 4 decision-maker preferences are
incorporated into the algorithm by using goal vectors.
They represent points generated in the criteria search
space within bounds determined according to the rule:
,)min(
),min()max(
),min(
max
min
ii
ii
ii
F
i
BestFg
BestF
i
BestFF
BestFg
(25)
where
min
i
g is the lower bound and
max
i
g is the
upper one for the i-th goal vector component,
i
BestF
is the best value of the i-th objective function amid
solutions in the archive,
,,1 Mi
M
is the number of
criteria. The recommended value of the
parameter
is 1.2.
4 PERFORMANCE
INVESTIGATION
Since we propose the multi-objective optimization
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
274
problem, and using the proposed approach results in
receiving an estimation of a Pareto set and not a single
solution, for each problem we should present the best
solution by the first criterion and the best one by the
second criterion. As in similar investigations, we
assign a limit to the maximum number of fitness
function evaluation as being equal to 2500. To tune
the restart meta-heuristic parameters we performed
additional experiments for the same MO optimization
problems, where the values of the restart operator
parameters were varied. According to the results of
these experiments the following parameters were
chosen: α=0.9, β=0.7, l
tail
=5, δ
tail
=0.0005.
The first problem we consider is the SISO system,
which is determined by the equation
32
432
72424
10 35 50 24
ss s
Gs
s
sss
,
(26)
and for which we received models: the best one by the
first criterion value
*
2
0.7696275 1.621897
2.522232 1.621897
t
s
Gs
ss
and the best
one by the second criterion value
*
2
0.86107 0.679314
1.568184 0.679314
t
s
Gs
ss
, after 25
independent launches of the proposed PICEA-g with
the restart meta-heuristic.
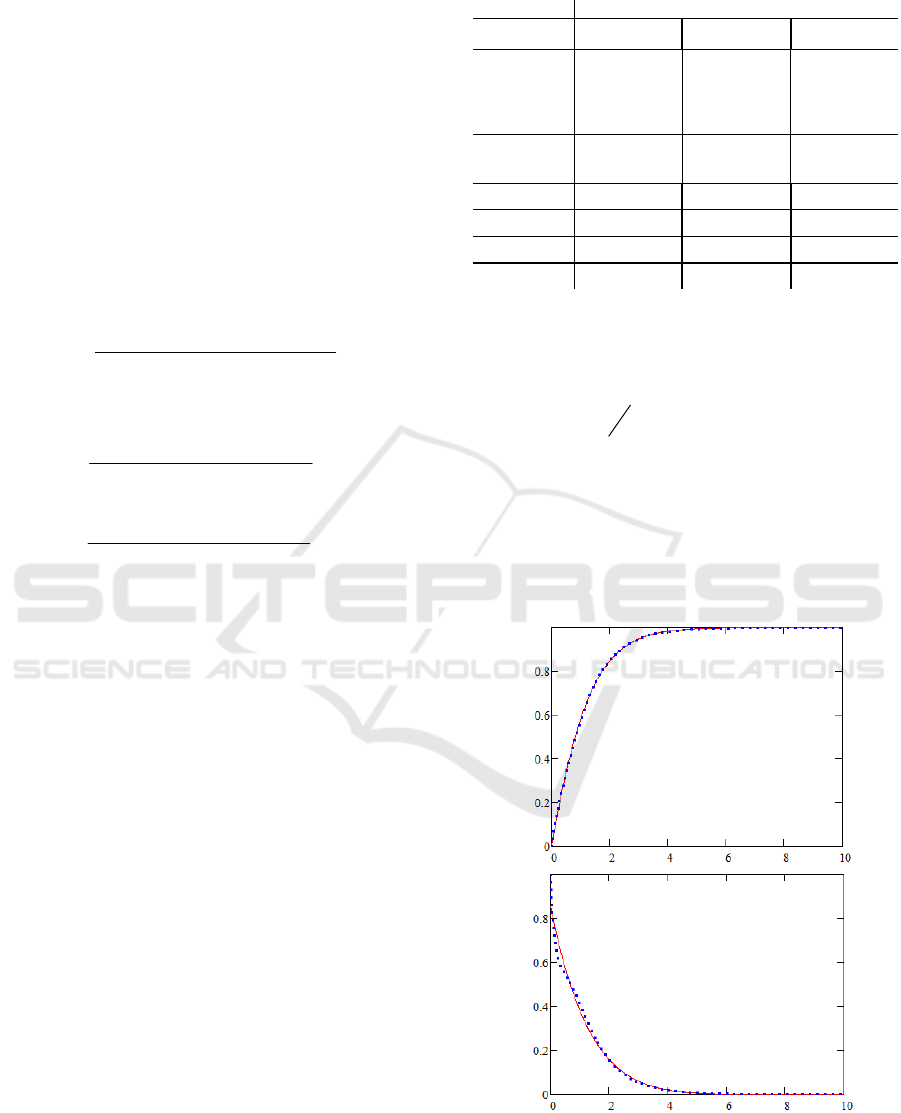
The initial model and reduced model outputs are
given in Figure 1, where the dotted line is the initial
model output and the solid line is the output of the
reduced model. The numeric adequacy estimation is
given in Table 1, where the results of the proposed
approach are compared with the results received in
different studies using other approaches and
optimization tools, including the PICEA-g algorithm
without the restart meta-heuristic. Knowing the
model parameters makes it possible to calculate
criteria and compare approaches. Here we use the
following notation: with “the proposed approach” we
mean the solutions found by PICEA-g with the restart
meta-heuristic, 1 – is the same approach, but without
restarting, 2 – COBRA optimization tool and
asymptotical equivalence (Ryzhikov et al., 2017), 3 –
(Desai, Prasad, 2013), 4 – (Parmar el. al., 2007) and
5 – (Narwal, Prasad, 2016).
Table 1: SISO problem (26): performance of approaches.
Criterion
Approach
1
I
2
I
3
I
Proposed
7.48510
-5
1.31310
-4
6.51510
-3
Proposed
4.20510
-4
7.37310
-4
6.04710
-3
1,
7.56410
-5
1.32610
-4
6.55010
-3
1,
1.13410
-3
1.98910
-3
6.19810
-3
2
5
7.458 10
4
1.308 10
3
6.901 10
3
4
2.841 10
4
4.982 10
3
5.236 10
4
4
2.394 10
4
4.197 10
0.018
5
3
1.986 10
3
3.483 10
3
7.612 10
The approximations of the Pareto front, which
were made during every algorithm launch and the
randomly chosen single Pareto front estimation, are
given in Figure 2, where the criteria are represented
with a mapping
1
1 C
, where C is a criterion, and
this mapping was maximized by the searching
algorithm. As can be seen, there is not such a solution
that would bring the maximum of two of these criteria
representations at the same time. This is why it is
necessary to solve the multi-objective optimization
problem if the model must satisfy more than one
criterion.
a)
b)
Figure 1: Initial model (dotted line) and lower order model
(solid line) outputs for the – a) - unit-step input function and
– b) – Dirac input function.
Multi-objective Order Reduction Problem Solving with Restart Meta-heuristic Implementation
275
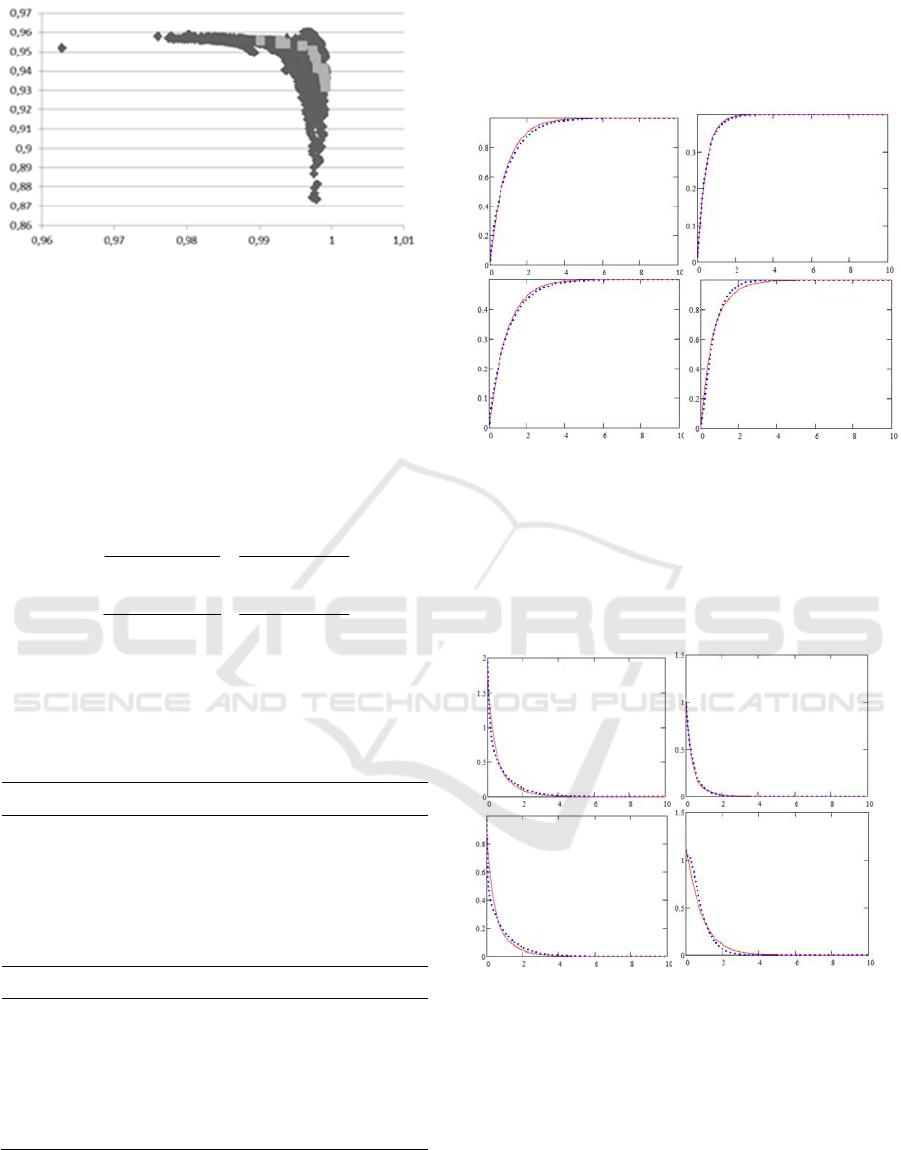
Figure 2: Pareto front estimation in all of the runs (black)
and a single front estimation (grey).
Although the PICEA-g with the restart meta-
heuristic is a multi-objective optimization tool and it
is efficient in solving the problem with two criteria,
solutions with maximum criterion values outperform
most of the solutions obtained by the optimization
algorithms solving a single criterion problem.
A similar problem was considered for the MIMO
system order reduction problem
25
4
110 2 5
10 6
120 23
s
s
ss s s
Hs
ss
ss s s
(27)
for the same computational resources and algorithm
runs we received the set of models with the highest
criteria values given in Table 2.
Table 2: MIMO problem (27): solution found.
*
t
Gs
*2
3.145035 2.168462,
m
Ds s s
*1,1
1.206913 2.168462,
m
Ns s
*1,2
0.927334 0.867384,
m
Ns s
*2,1
0.515576 1.084231,
m
Ns s
*2,2
1.581389 2.168462,
m
Ns s
*
t
Gs
*2
4.989368 4.344733,
m
Ds s s
*1,1
1.7814044 4.344733,
m
Ns s
*1,2
1.028391 1.737893,
m
Ns s
*2,1
0.792901 2.172366,
m
Ns s
*2,2
1.088212 4.344733,
m
Ns s
As for the SISO problem, the outputs for unit-step
and Dirac function inputs are given in Figures 3 and
4, respectively. In these figures a) represents the
outputs of (1,1) model components, b) represents the
outputs of (1,2) components, c) represents the outputs
of (2,1) components, and d) represents the outputs of
(2,2).
Figure 3: Initial model (dotted line) and lower order model
(solid line) outputs for the unit-step function.
Similar experimental results are compared in
Table 3, but there criteria are summarized by all the
model components.
Also, the Pareto front estimations are given in
Figure 5.
Figure 4: Initial model (dotted line) and lower order model
(solid line) outputs for the Dirac function.
Here we use the following notation:
“the proposed
approach”
is PICEA with the restart meta-heuristic, 1
– is the same, but without the restart, 2 – COBRA
optimization tool and asymptotical equivalence
(Ryzhikov et al., 2017), 3 – (Desai, Prasad, 2013) and
4 – (Narwal, Prasad, 2016).
0,86
0,88
0,9
0,92
0,94
0,96
0,98
0,96 0,97 0,98 0,99 1 1,01
a) b)
c) d)
a) b)
c)
d)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
276

Table 3: MIMO problem (27): performance of approaches.
Criterion
Approach
1
I
2
I
3
I
Proposed
5.00410
-3
0.022 0.128
Proposed
0.028 0.103 0.095
1
6.67010
-3
0.022 0.140
1
0.025 0.970 0.102
2
3
3.323 10
0.027
0.136
3
0.02
0.325
0.218
4
0.045
0.372
0.409
Figure 5: Pareto front estimation in all of the runs (black)
and a single front estimation (grey).
To summarize, all the figures and examination
results prove that the proposed approach and the
optimization algorithm are a reliable combination of
techniques for solving the order reduction problems.
5 CONCLUSIONS
It is widely known that solving the order reduction
problem for LTI systems requires a powerful and
reliable global optimization tool for black-box
problems. Many researchers, according to other
studies on this topic, are using heuristic optimization
techniques, which allow them to achieve satisfying
results. However, for some problems there is an aim
not just to identify the parameters by some criterion,
but to identify the parameters which would fit two or
more criteria.
In order to solve the multi-objective problem, it is
necessary to use the MO optimization algorithm
because the Pareto front is not just a single point in a
vector space and, generally, it cannot be determined
with additive or multiplicative combination of the
criteria. Figures 3 and 5 prove this hypothesis for the
considered problems. It can be seen that the Pareto
front is a curve, so the best solution for the unit-step
function would not prove that this model is the best
for another input. Results received in a single run,
which are marked in these figures in grey, prove that
we receive an acceptable approximation of the Pareto
front. As was shown in this study, a meta-heuristic
can be used to sufficiently improve the multi-
objective optimization algorithm performance with
the same computational resources.
This is one more class of optimization problem for
which the algorithm efficiency and performance
improve after implementing the proposed restart
operator. The results of this work demonstrate that
this algorithm is not only good at estimating the
Pareto front, but can also find good solutions, which
are close or even outperform the best solutions found
by the single criterion optimization tools using the
same resources.
Further work is related to improving the quality of
the estimation of the Pareto front in the case of a
higher criterion number as well as to developing a
meta-heuristic to improve the proposed restart
operator and the performance of different multi-
objective algorithms. The other aspect of further work
is related to using a modified optimization tool to
solve MIMO order reduction problems in which each
output is characterized by its own criteria.
ACKNOWLEDGEMENTS
This research is supported by the Russian Foundation
for Basic Research within project No 16-01-00767.
REFERENCES
Beligiannis, G.N., Tsirogiannis, G.A., and Pintelas, P.E.,
2004. Restartings: a technique to improve classic
genetic algorithms’ performance. International Journal
of Computational Intelligence, vol. 1, pp. 112–115.
Chen, T. C., Chang, C. Y., Han, K. W., 1979. Reduction of
transfer functions by the stability equation method.
Journal of Franklin Inst, vol. 308, no. 4: pp. 389-404.
Desai, S., Prasad, R., 2013. A novel order diminution of LTI
systems using Big Bang Big Crunch optimization and
Routh approximation. Appl. Math. Model, vol. 37: pp.
8016-8028.
Fukunaga, A.S., 1998. Restart scheduling for genetic
algorithms. In: Eiben A.E., Bäck T., Schoenauer M.,
Schwefel HP. (eds) Parallel Problem Solving from
Nature – PPSN V. PPSN 1998. Lecture Notes in
Computer Science, vol 1498. Springer, Berlin,
Heidelberg.
Narwal, A., Prasad, B. R., 2016. A Novel Order Reduction
Approach for LTI Systems Using Cuckoo Search
Optimization and Stability Equation. IETE Journal of
Research, 62(2): pp. 154-163.
0
0,2
0,4
0,6
0,8
0 0,2 0,4 0,6 0,8 1
Multi-objective Order Reduction Problem Solving with Restart Meta-heuristic Implementation
277

Parmar, G., Prasad, R., Mukherjee, S., 2007. Order
reduction of linear dynamic systems using stability
equation method and GA. International Journal of
computer and Infornation Engeneering, 1(1): pp. 26-
32.
Ramesh, K., Nirmalkumar, A., Gurusamy, G., 2011. Order
Reduction of LTIV continuous MIMO system using
Stability Preserving approximation method.
International Journal of Computer Applications, vol.
36, no. 8: pp. 1-8.
Ryzhikov, I., Semenkin, E., Akhmedova, Sh., 2017. LTI
system order reduction approach based on asymptotical
equivalence and the Co-operation of biology-related
algorithms. IOP Conference Series: Materials Science
and Engineering, vol. 173, 2017.
Ryzhikov, I., Semenkin, E., 2017. Restart operator meta-
heuristics for a problem-oriented evolutionary
strategies algorithm in inverse mathematical miso
modelling problem solving. IOP Conference Series:
Materials Science and Engineering, vol. 173, 2017.
Wang, R., 2013. Preference-Inspired Co-evolutionary
Algorithms. A thesis submitted in partial fulfillment for
the degree of the Doctor of Philosophy, University of
Sheffield: p. 231.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
278
