
Quadrotor Attitude Control using
Incremental Nonlinear Dynamics Inversion
Rodrigo Coelho
1
, Alexandra Moutinho
2
and Jos
´
e Raul Azinheira
2
1
Instituto Superior T
´
ecnico, Universidade de Lisboa, Portugal
2
IDMEC, Instituto Superior T
´
ecnico, Universidade de Lisboa, Portugal
Keywords:
Incremental Nonlinear Dynamics Inversion, Quadrotor, Attitude Control, Sensor-based Control.
Abstract:
Given the large flight envelope of vertical take-off and landing vehicles, and the nonlinear nature of multi-
rotor aircraft, especially in aggressive maneuvering, nonlinear control strategies are often considered. Yet,
most available solutions are model dependent and thus require a precise knowledge of the system dynamics,
including the hard to model aerodynamics. This paper proposes a sensor-based approach to the problem. It
considers a recent strategy based on incremental control and Nonlinear Dynamics Inversion (NDI), the Incre-
mental Nonlinear Dynamics Inversion (INDI), to solve the attitude control problem of quadrotors. The INDI
general formulation is presented, and then applied considering the attitude stabilization of a quadrotor. In
order to apply the INDI solution to this case study, a linear predictor for the angular acceleration is provided.
Simulation results demonstrate the robustness of this sensor-based approach to model-parameter uncertainties
and wind disturbances. An analysis is also done regarding the tuning of INDI parameters and its sensitivity to
the chosen sampling time.
1 INTRODUCTION
In these past few decades there has been a growing
interest in unmanned aerial vehicles (UAVs). These
vehicles are characterized by the absence of an on-
board human pilot, being instead controlled remotely
and/or by an onboard control system. This interest is
brought by the recent technological advances in the
area of microprocessors, microcontrollers and sensor
systems as well as their respective manufacturing pro-
cesses. Thanks to these advances the prices and sizes
have been continuously decreasing and consequently
UAVs have also become cheaper, smaller and easier to
build. Their applications were initially reserved to the
domain of military operations, where they decrease
the risk of human loss and can increase efficiency,
especially in tedious and/or dangerous missions such
as covert or surveillance operations. Now UAVs are
open to the general public and are being applied to
new and different domains every day, such as aerial
footage, fire prevention, search and rescue operations,
monitoring of agriculture crops, infrastructure inspec-
tion and even multimedia or pure recreation.
There is a special interest in aircrafts with Verti-
cal Take-Off and Landing (VTOL) capabilities due to
their ability to operate with tighter spatial constraints
than traditional fixed-wing aircraft. In this category
the most studied aircraft are the helicopters and the
multirotors where we have a need for robust and sta-
ble control as there is absence of dynamic pressure
that in conventional aircraft is brought by the for-
ward flight speed, ruling out inherent stability. Due to
the unstable and nonlinear nature of multirotors and
the large flight envelope associated to a VTOL, espe-
cially if aggressive maneuvering is necessary, nonlin-
ear control strategies must be considered.
Several nonlinear solutions are presented for this
problem such as Gain-Scheduling (Sadeghzadeh
et al., 2011), Nonlinear Dynamics Inversion
(NDI) (Mallikarjunan and et al., 2012), and Back-
stepping (Mallikarjunan and et al., 2012), as well
as adaptive (Krstic et al., 1995; Sadeghzadeh et al.,
2011; Mallikarjunan and et al., 2012; Bastin, 2013)
and robust (Liao et al., 2002; Goman and Kolesnikov,
1998) control techniques. However, these are ap-
proaches based on the knowledge of the system,
and as such called model-based solutions. For the
particular case of aircraft control, this model require-
ment can prove to be costly and time-consuming, as
the aerodynamic coefficients, for example, require
extensive wind-tunnel or flight tests to be properly
identified.
98
Coelho, R., Moutinho, A. and Azinheira, J.
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion.
DOI: 10.5220/0006435900980109
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 98-109
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Due to the general development of micro-electro-
mechanical systems (MEMS), smaller, more accu-
rate and more accessible sensors are available. This
allows for sensor-based control approaches, where
model knowledge is replaced by variable measure-
ments. An example of these approaches is the In-
cremental Nonlinear Dynamics Inversion (INDI), an
incremental variation of the Nonlinear Dynamics In-
version, and object of some recent studies regarding
flight control (Sieberling et al., 2010; Simpl
´
ıcio et al.,
2013). It is relatively easy to design as it does not
need the complete system model, only the input re-
lated part, because it uses sensor measurements to
compensate for the state-only dependent dynamics
such as the hard to model aerodynamics. This makes
it more robust than traditional feedback linearization
or NDI as it is not so sensitive to modeling errors. The
downside are stricter requirements in the sampling
frequency and the need for accurate sensors reading
and/or variables estimation.
This paper addresses the INDI solution for the
quadrotor attitude control problem. In order to better
understand and evaluate this approach, the results pre-
sented test its robustness to model uncertainties and
wind disturbances, as well as provide an insight on its
sensitivity to design parameters.
The remaining of this paper is organized as fol-
lows. After the general formulation of INDI is intro-
duced (sec. 2), and the model of the quadrotor is de-
fined (sec. 3), the INDI control approach is applied to
the quadrotor attitude control problem (sec. 4). Like
for other feedback linearization approaches, this cor-
responds to the usual two-steps procedure of lineariz-
ing the system (here using INDI) and then applying
linear control to the linearized system. The imple-
mentation requires that angular accelerations be avail-
able. In this paper they are estimated using a linear
predictor. In section 5, a parameter tuning study re-
garding the INDI controller and the linear estimator
is presented, followed by some simulation results that
illustrate the solution performance and its robustness
to model uncertainties and wind disturbances, as well
as its sensitivity to the sampling time. Finally, sec-
tion 7 closes with some final remarks.
2 NONLINEAR DYNAMICS
INVERSION CONTROL
THEORY
In order to better understand the incremental ver-
sion of the nonlinear dynamics inversion, this section
presents both classic and incremental formulations of
this approach.
2.1 Nonlinear Dynamics Inversion
For the NDI formulation (Sieberling et al., 2010),
consider the following affine n-th order MIMO sys-
tem
˙
x = f(x) +G(x)u (1)
y = h(x) (2)
where x ∈ R
n
is the system state vector, u ∈ R
m
is the
input vector, f ∈ R
n
and h ∈ R
m
are smooth vector
fields, and G ∈ R
m×n
is a matrix with each column
g
i
∈ R
n
a smooth vector field.
By differentiating (2) with respect to time we have
˙
y =
dh(x)
dt
=
∂h
∂x
˙
x (3)
=
∂h
∂x
f(x) +
∂h
∂x
G(x)u (4)
= L
f
h(x) + L
G
h(x)u (5)
where L
f
h(x) and L
G
h(x) are the respective Lie
Derivatives of h(x) with respect to f and G. Assum-
ing L
G
h(x) is invertible, the control action u may be
isolated as:
u = (L
G
h(x))
−1
(
˙
y − L
f
h(x)) (6)
For y = x and
˙
y a desired system dynamics
˙
x
d
, we
have L
G
h(x) = G(x) and L
f
h(x) = f(x) and we can
rewrite (6) as
u = (G(x))
−1
(
˙
x
d
− f(x)) (7)
This produces a linearized system in the form
˙
x =
˙
x
d
.
2.2 Incremental Nonlinear Dynamics
Inversion
Opposed to NDI, INDI has no requirements for the
input dynamics, so we can use a more generic formu-
lation (Azinheira et al., 2015) for nonlinear systems
such as
˙
x = f(x, u) (8)
If we linearize (8) around the previous time step con-
dition (x
0
,u
0
) with t
0
= t − T
s
and T
s
being the con-
troller sampling time, we have
˙
x
∼
=
˙
x
0
+
∂f
∂x
x
0
,u
0
(x − x
0
) +
∂f
∂u
x
0
,u
0
(u − u
0
) (9)
where
˙
x
0
= f(x
0
,u
0
). Assuming a small enough sam-
pling time T
s
, the state variation between samples can
be considered negligible (x ≈ x
0
). We can then sim-
plify (9) as
˙
x ≈
˙
x
0
+
∂f
∂u
x
0
,u
0
(u − u
0
) (10)
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
99

Figure 1: Block diagram representation of INDI control scheme.
Setting the desired dynamics as
˙
x =
˙
x
d
and defin-
ing F
u
=
∂f
∂u
x
0
,u
0
we obtain the following control input
u = u
0
+ F
−1
u
(
˙
x
d
−
˙
x
0
) (11)
where F
u
must be invertible and
˙
x
0
, x
0
and u
0
must
be available.
The INDI control scheme is described by the
block diagram of figure 1.
3 QUADROTOR MODEL
This section presents the quadrotor nonlinear model.
In order to do so, the required reference frames are
first introduced, followed by the kinematic and dy-
namic equations of motion.
3.1 Reference Frames
The first spatial reference necessary is the inertial
frame, a frame that describes time and space homo-
geneously, isotropically, and in a time-independent
manner. We assume the ”flat Earth” model and use
a North-East-Down (NED) frame located in the sur-
face of the Earth and centered on the quadrotor ini-
tial position, I = (O
I
;x
I
;y
I
;z
I
), as the inertial ref-
erence frame. We will also define a frame fixed to
the quadrotor and centered in its center of gravity,
B = (O
B
;x
B
;y
B
;z
B
), as seen in figure 2.
Another frame that needs to be defined is the In-
ertial Measurement Unit (IMU) frame. This frame is
centered in the IMU at d
IMU
= (x
IMU
,y
IMU
,z
IMU
) rel-
ative to the B frame and also fixed to the quadrotor.
3.2 Kinematics
The kinematics describes the movement of the
quadrotor in the inertial frame I . To describe the po-
sition P of the quadrotor in I frame we can consider
Figure 2: Inertial and body-centered coordinate sys-
tems (Esteves et al., 2015).
the following transformation
˙
P = R
T
V (12)
where P = (x, y,z)
T
is the body position in I frame,
V = (u,v,w)
T
is the linear velocity in B frame and R
is the rotation matrix from I to B frames expressed
using the quadrotor attitude represented using quater-
nions Q = (q
0
,q
1
,q
2
,q
3
)
T
R =
1 − 2q
2
2
− 2q
2
3
2(q
1
q
2
+ q
3
q
0
) 2(q
1
q
3
− q
2
q
0
)
2(q
1
q
2
− q
3
q
0
) 1 − 2q
2
1
− 2q
3
3
2(q
2
q
3
+ q
1
q
0
)
2(q
1
q
3
+ q
2
q
0
) 2(q
2
q
3
− q
1
q
0
) 1 − 2q
3
1
− 2q
2
2
(13)
The rotational kinematics is described by
˙
Q = S
Q
ω
ω
ω (14)
where ω = (p,q,r)
T
is the angular velocity of the
quadrotor in the three main directions of B frame and
S
Q
is a transformation matrix that using the quater-
nions attitude representation is defined as
S
Q
= −
1
2
q
1
q
2
q
3
−q
0
q
3
−q
2
−q
3
−q
0
q
1
q
2
−q
1
−q
0
(15)
3.3 Dynamics
The dynamics model used is based on Newton-Euler
approach following (Stevens and Lewis, 2003).
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
100

The translational dynamics is given by
m
˙
V = F
P
+ F
d
+ mRg − mΩ
Ω
ΩV (16)
with F
P
= (0,0,
∑
4
j=1
F
j
)
T
the generalized rotors force
where F
j
, j = 1,2,3,4 is the force produced by rotor
j, F
d
∈ R
3
the aerodynamics drag force and mRg =
F
g
∈ R
3
the gravitational force expressed in B frame.
The cross-product matrix Ω
Ω
Ω = ω
ω
ω× ∈ R
3×3
associated
with the Coriols term mΩ
Ω
ΩV is defined as
Ω
Ω
Ω =
0 −r q
r 0 −p
−q p 0
(17)
The rotational dynamics is described by
J
˙
ω
ω
ω = −Ω
Ω
ΩJω
ω
ω + τ
τ
τ
P
(18)
with Ω
Ω
ΩJω
ω
ω the Coriolis torque related term, τ
τ
τ
P
=
r
m
(F
2
− F
4
), r
m
(F
1
− F
3
),
∑
4
j=1
(−1)
j+1
τ
j
T
the ro-
tors generalized torque where F
j
,τ
j
, j = 1, 2,3, 4 are
the force and torque produced by rotor j, r
m
is the
distance between the rotors and the quadrotor cen-
ter of mass, and where the aerodynamic drag torque
τ
τ
τ
D
∈ R
3
was neglected given the quadrotor reduced
dimensions.
4 APPLICATION TO
QUADROTOR ATTITUDE
CONTROL
This section concerns the INDI application to the
quadrotor attitude control. Being a feedback lin-
earization methodology, the control design corre-
sponds to the usual two-steps procedure of lineariz-
ing the system (here using NDI or INDI for compari-
son) and then applying linear control to the linearized
system. The implementation also requires that angu-
lar accelerations be available, and with that purpose a
linear predictor is introduced. The complete solution
is depicted in the block diagram of fig. 3.
4.1 System Linearization
In order to provide a better comparison between clas-
sic and incremental nonlinear dynamics inversion ap-
proaches, both formulations will be applied to the
quadrotor attitude control problem. Both formula-
tions consider x = [ω
ω
ω
T
, Q
T
]
T
, u = τ
τ
τ
p
and y = x.
4.1.1 NDI
For NDI we define f(x) and G(x) as
f(x) =
−J
−1
Ω
Ω
ΩJω
ω
ω
S
Q
ω
ω
ω
(19)
G(x) =
J
−1
0
0
0
4×3
(20)
Substituting (19)-(20) into (7) we obtain
u =
J
−1
0
0
0
4×3
+
˙
ω
ω
ω
d
˙
Q
d
−
−J
−1
Ω
Ω
ΩJω
ω
ω
S
Q
ω
ω
ω
(21)
where [·]
+
corresponds to the pseudo-inverse opera-
tion, and which simplified results in the NDI control
law
u = J(
˙
ω
ω
ω
d
+ J
−1
Ω
Ω
ΩJω
ω
ω) (22)
where
˙
ω
ω
ω
d
∈ R
3
is a desired angular rate dynamics (ac-
celeration).
4.1.2 INDI
For INDI we define f(x,u) as
f(x,u) =
−J
−1
Ω
Ω
ΩJω
ω
ω + J
−1
τ
τ
τ
S
Q
ω
ω
ω
(23)
and the derivative
∂f
∂u
x
0
,u
0
=
J
−1
0
0
0
4×3
(24)
Subsituting (23)-(24) into (11) we obtain
u = u
0
+
J
−1
0
0
0
4×3
+
˙
ω
ω
ω
d
˙
Q
d
−
˙
ω
ω
ω
0
˙
Q
0
(25)
that simplifies into the INDI control law
u = u
0
+ J(
˙
ω
ω
ω
d
−
˙
ω
ω
ω
0
) (26)
where
˙
ω
ω
ω
d
∈ R
3
and
˙
Q
d
∈ R
4
are respectively desired
angular rate and attitude dynamics and
˙
ω
ω
ω
0
∈ R
3
and
˙
Q
0
∈ R
4
the last observed values of these variables.
Since this paper only addresses the attitude con-
trol, the vertical control is assumed to be dealt with
by another control loop, which defines the value of
the generalized forces F
P
= (0,0,
∑
4
j=1
F
j
)
T
, with F
j
the thrust force produced by rotor j, and therefore the
necessary thrust to keep the quadrotor hovering.
The control action defined by the NDI or INDI
controllers corresponds to the generalized moments
applied to the quadrotor by the four rotors, u = τ
τ
τ
p
. In
order to apply the required control action, these gener-
alized moments need to be converted into the four ro-
tors angular speeds ω
p
i
. This transformation is called
control allocation and corresponds in this case to
ω
ω
ω
p
=
p
G
+
a
u (27)
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
101

Linear
predictor
Attitude
estimator
Rate gyro
Accelerometer
Quadrotor
Figure 3: Block diagram representation of proposed attitude control solution.
where ω
ω
ω
p
p
p
= (ω
1
,ω
2
,ω
3
,ω
4
)
T
are the rotors always
positive angular speed and
G
a
=
0 r
m
K
F
2
0 −r
m
K
F
4
r
m
K
F
1
0 −r
m
K
F
3
0
K
τ
1
−K
τ
2
K
τ
3
−K
τ
4
(28)
with K
τ
i
, i = 1, 2,3, 4 the rotors torque coefficients.
4.2 Linear Control
Applying the NDI and INDI to the quadrotor model
solves the problem of compensating the nonlineari-
ties in the system. It does not, however, solve the
complete attitude control problem. After the system
linearization done by INDI (or NDI), we may now use
linear control to stabilize each system state separately.
We will use the principle of time scale separation to
control the quadrotor attitude in two loops: an inner
one that stabilizes the attitude rate ω
ω
ω and an outer loop
to control the attitude Φ
Φ
Φ itself.
For each loop we consider a simple proportional
controller
˙
ω
ω
ω
d
= K
ω
(ω
ω
ω
d
− ω
ω
ω) (29)
ω
ω
ω
d
= K
Φ
(Φ
Φ
Φ
d
− Φ
Φ
Φ) (30)
where the gains K
ω
∈ R
3×3
and K
Φ
∈ R
3×3
are diag-
onal matrices.
With the INDI linearization of the quadrotor dy-
namics, followed by the cascaded linear control, the
closed-loop system can be represented as a second
degree linear time-invariant system for each angle
Φ
i
, i = 1, 2,3 as
Φ
i
Φ
i
d
=
K
ω
i
K
Φ
i
s
2
+ K
ω
i
s + K
ω
i
K
Φ
i
(31)
where K
ω
i
and K
Φ
i
can be chosen according to our tar-
get damping coefficient ξ
i
and natural frequency ω
n
i
as
K
ω
i
= 2ξ
i
ω
n
i
(32)
K
Φ
i
=
ω
n
i
2ξ
i
(33)
These two parameters need to be chosen so that the
controlled system follows the performance require-
ments. We follow (Esteves et al., 2015) and choose
the following performance requirements for the atti-
tude response
• A 4.3% overshoot allowed;
• For roll and pitch, a rising time inferior to 1 sec-
ond and a settling time inferior to 3 seconds for a
step reference;
• For yaw, a rising time inferior to 4 sec and a set-
tling time inferior to 8 seconds for a step refer-
ence.
The parameters chosen are presented in table 1 and
the step response of the linearized system is presented
in figure 4.
Table 1: Linear controller gains.
Angle ξ ω
n
(rad/s) K
ω
i
K
Φ
i
roll (φ) 0.79 6.32 10 4
pitch (θ) 0.79 6.32 10 4
yaw (ψ) 0.9 1.5 2.7 0.83
4.3 Linear Predictor for Angular
Acceleration Estimation
To implement the INDI controller, precise informa-
tion about the quadrotor angular acceleration
˙
ω
ω
ω is
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
102

Figure 4: Step response of the attitude closed-loop system.
needed. This information is not directly obtained
from sensor measurements, so an estimator is re-
quired. Following (Sieberling et al., 2010), we
present a linear predictor that takes advantage of the
INDI controller characteristics to solve the problem
of delay in real-world sensors. As the INDI controller
decouples the quadrotor dynamics and the linear con-
trol outer loops define each linearized state response,
we can design a decoupled linear estimator for each
state. The estimator structure is
˙
ω
ω
ω
k
=
5
∑
i=1
[θ
θ
θ
ω,i
ω
ω
ω
k−i
+ θ
θ
θ
d,i
ω
ω
ω
d,k−i
] + ε
ε
ε (34)
with ω
ω
ω
d,k−i
the desired angular speed given by the
speed control loop, θ
θ
θ
ω,i
and θ
θ
θ
d,i
the measured and de-
sired angular speeds coefficients, and ε
ε
ε white noise.
To calculate the estimator coefficients we use the
least-squares method with simulation data of a linear
system that represents the quadrotor behavior when
linearized with INDI and controlled by a decoupled
linear regulator. The SISO transfer function is
ω(s)
ω
r
(s)
=
K
s + K
(35)
with ω(s) the angular speed, ω
d
(s) the desired angu-
lar speed, and K the gain imposed by the angular rate
inner control loop. The angular acceleration
˙
ω is ob-
tained by differentiation.
With the knowledge of the angular rate ω
ω
ω, the re-
spective reference ω
ω
ω
d
and the angular acceleration
˙
ω
ω
ω,
the coefficients θ
θ
θ = [θ
θ
θ
d
θ
θ
θ
¯
ω
] were estimated imple-
menting the least-squares method in Matlab
r
along
with a simulation of (35). The simulation run for 10 s
considering a pulse reference with a π/6 rad height
and 4 s duration, along with the system’s response for
the gains used in each angular rate control loop.
With the system’s response ω
ω
ω and the angular ac-
celeration
˙
ω
ω
ω calculated by numeric differentiation, we
solve
θ
θ
θ = (H
T
H)
−1
H
T
z (36)
where H = [1 r
j
(t−1dt)
...r
j
(t−5dt)
ω
j
(t−1dt)
...ω
j
(t−5dt)
]
is known as the design matrix that contains the refer-
ences r
j
and angular rates ω
j
in the last 5 samples and
z is the vector that contains the angular accelerations
one step ahead. Each row of matrix H and vector z
represent each sample taken from the simulation at a
frequency equal to the controller sampling frequency
1/T
s
.
5 SIMULATION RESULTS
This section presents the results and tests obtained
in a Matlab/Simulink
r
implementation. We first ex-
plore the controller and estimator parameter tuning,
and after evaluate the overall approach performance,
namely its robustness to model uncertainties and its
sensitivity to sampling time.
5.1 Design Parameter Tuning
5.1.1 INDI Controller
Following (Azinheira et al., 2015), the INDI con-
troller implementation considers an additional control
parameter η. This parameter weights the update of the
control action ∆u = F
−1
u
(
˙
x
d
−
˙
x
0
) in relation to the last
input provided u
0
u = u
0
+ η∆u (37)
Taking into account the integrative characteristic of
INDI, we can compare η to an integral gain in a PID
controller. Whereas in a PID controller the integral
gain is meant to correct stationary errors, in INDI η is
meant to dampen the integration to help cope with the
imperfections in the actuation system and reduce the
error amplification.
Figure 5 shows the required control action (angu-
lar speed for each motor ω
p
i
) and the respective re-
sponse of the system in roll angle φ to a step refer-
ence φ
d
= 15 deg for different values of the parameter
η. We can see for the case of η = 1, equivalent to
the theoretical INDI, that the required control action
presents high frequency and amplitude oscillation that
even hits the input saturation point at ω
p
i
≈ 680 rad/s.
The attitude response (output) follows the reference
φ
d
similarly to the (linear) response φ
l
of a theoreti-
cal second-order LTI system with the same damping
coefficient and natural frequency as the linear control
loop implemented, with some high-frequency but low
amplitude oscillations. This low amplitude of the os-
cillations is due to the inherent damping of higher-
frequencies of the quadrotor dynamics. As we lower
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
103
2 4 6 8
0
5
10
15
Time (seconds)
roll (deg)
step response
reference
linear
output
2 4 6 8
300
400
500
600
700
Time (seconds)
motor rate (rad/s)
Input signal
motor1
motor2
motor3
motor4
(a) η = 1
2 4 6 8
0
5
10
15
Time (seconds)
roll (deg)
step response
2 4 6 8
450
500
550
600
Time (seconds)
motor rate (rad/s)
Input signal
reference
linear
output
motor1
motor2
motor3
motor4
(b) η = 0.9
2 4 6 8
0
5
10
15
Time (seconds)
roll (deg)
step response
2 4 6 8
500
520
540
560
Time (seconds)
motor rate (rad/s)
Input signal
reference
linear
output
motor1
motor2
motor3
motor4
(c) η = 0.3
2 4 6 8
0
5
10
15
Time (seconds)
roll (deg)
step response
2 4 6 8
500
520
540
560
Time (seconds)
motor rate (rad/s)
Input signal
reference
linear
output
motor1
motor2
motor3
motor4
(d) η = 0.1
Figure 5: Step response and INDI required control action for different η.
the value of η we can observe a decrease in the re-
quired control action ω
p
i
and respective oscillations.
When η is lowered to 0.1, the required control ac-
tion oscillations increase again though with lower fre-
quency. A clear deterioration of the attitude response
is observed, with an increase of the overshoot as well
as of the settling time, probably consequence of the
response to errors becoming too slow with the accen-
tuated decrease in the INDI integration. Making a bal-
ance between required control action, response time
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
104

and oscillation damping, we set η = 0.3.
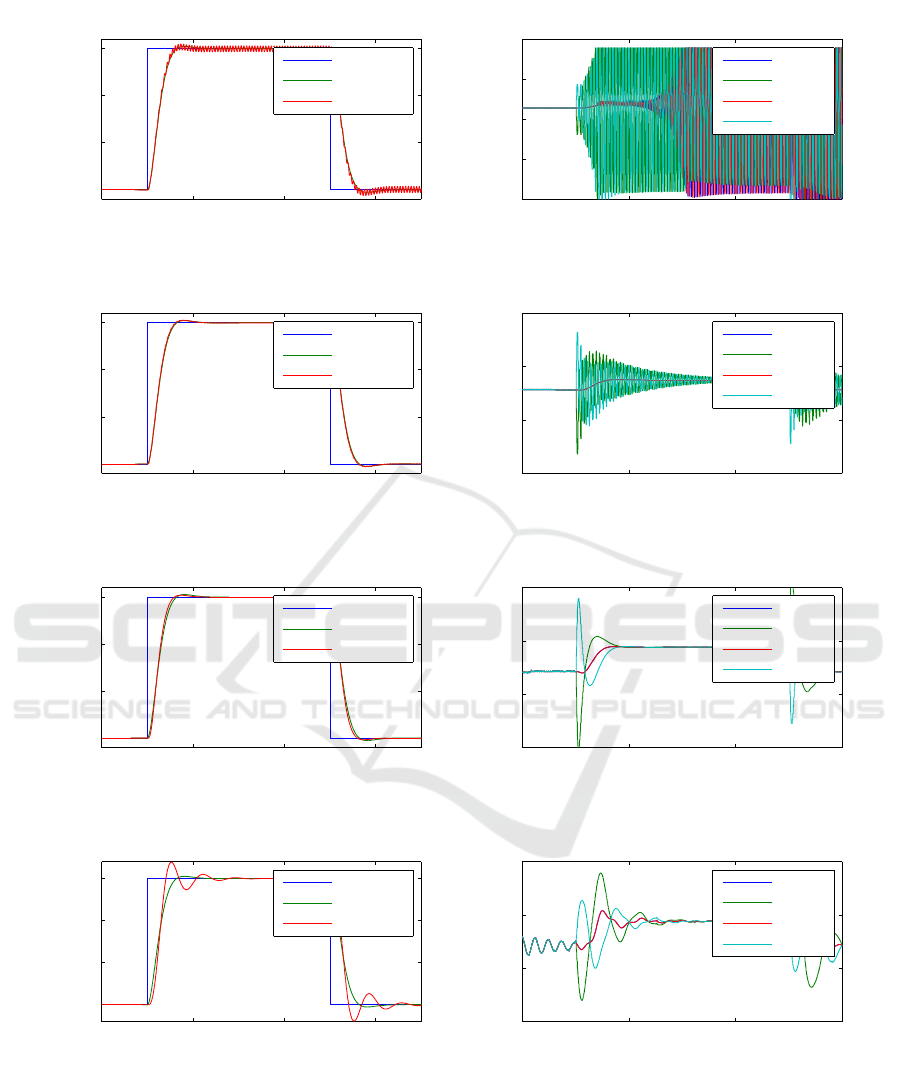
5.1.2 Angular Acceleration Estimation
A frequent problem in estimation is the delay in mea-
surements. Besides the measurements accuracy, it
is important to minimize measurement delay since it
may seriously deteriorate the performance of the con-
trolled system. Additional to these issues, in the case
of our controlled system we observed a different phe-
nomena, as the linear predictor assumes a linear sys-
tem response and gives a very small weight to the ac-
tual measurements. This results in a response esti-
mation which is faster than the real system response,
as presented in figure 6. This happens because when
adding the η parameter to the INDI implementation,
the resulting linearization is no longer pure, resulting
on a slower response. Closing the loop, we verify that
this slower response leads to a desynchronization be-
tween the estimated angular acceleration and the real
one. As the estimation is faster than the true accelera-
tion, we experimented adding a delay to the estimator.
Figure 7 presents the estimated angular acceleration
ˆ
˙
ω
ω
ω
for different delay values b, for both open- and closed-
loop scenarios. We can observe that increasing the
estimation delay to b = 2 increases the synchroniza-
tion of the closed-loop response and decreases oscil-
lation. A higher delay results in a response oscillation
increase. The estimation error is still significant and
further improvement in the estimation should improve
the closed-loop response.
5.2 Robustness to Model Uncertainties
In order to evaluate the performance of the proposed
sensor-based solution, we will evaluate its robustness
to model uncertainties. In the quadrotor control case,
we will test the only model element that is explicit in
the INDI control law, the matrix of inertia. To repre-
sent the model inaccuracies we will multiply the real
inertia matrix J (used in the quadrotor dynamics sim-
ulator) by a factor σ representing the parameter un-
certainty. The estimated inertia
˜
J
˜
J = σJ (38)
is the inertia used by the INDI control law.
Assuming perfect sensors, figure 8 shows the re-
sponse of the controlled system to a step reference in
roll angle. Figure 8(a) presents the system response
when INDI assumes an inertia lower than the real
one. We can observe that for σ = 0.4 (in fact for
0.4 ≤ σ < 1) the controlled system has a response
very close to the nominal one (σ = 1). When σ = 0.3,
the controlled system response shows high frequency
oscillations and for lower values (σ < 0.3) the system
becomes unstable. Figure 8(b) shows that the system
response for σ ≤ 2 is a little more oscillatory, corre-
sponding to a slightly faster response. For σ ≥ 3 we
have a higher overshoot and settling time, which for
higher values of σ may result in the system instabil-
ity. This means that even with an underestimation of
60% or overestimation of 100% of the quadrotor in-
ertia, the INDI controller still shows very little loss of
performance.
Assuming real sensors and including the angu-
lar acceleration estimation, figure 9 presents the con-
trolled quadrotor response to a 15 deg reference step
in roll angle for different values of σ. We can observe
an evolution similar to the perfect sensors test, with
the controlled response degraded with the higher vari-
ation of the inertia uncertainty. This degradation hap-
pens for smaller inertia errors as we can see in fig. 9(a)
for inertia underestimation and on fig. 9(b) for iner-
tia overestimation. For this more realistic scenario,
we observe that the controlled system performance is
similar for 0.5 ≤ σ ≤ 1.5, corresponding to a smaller
but still significant robustness to model uncertainty.
5.3 Sensitivity to Sampling Time
The deduction of the INDI control law lies on the as-
sumption that for a small enough sampling time the
state variation between samples is negligible when
compared to the actuation input. The satisfaction of
this assumption requires in practice that the controller
dynamics be much faster than the quadrotor dynam-
ics. In the following we will check if this holds for our
INDI controller implementation, and how high does
this sampling rate need to be so that INDI is effective.
Figure 10 represents the system response to a
15 deg step in roll, where the chosen base sampling
frequency f
s
= 100 Hz is limited by the used sensors
set. We can observe that the decrease of the sam-
pling frequency below 50 Hz deteriorates the system
response, presenting a higher overshoot and settling
time. At f
s
= 20 Hz the system seems close to sta-
bility limits and for lower sampling frequencies the
system becomes unstable. These results show that, as
expected, INDI is sensitive to the controller sampling
frequency.
6 ROBUSTNESS TO WIND
DISTURBANCES
One of the major advantages of INDI is its robustness
to state-only dependent model uncertainties. In air-
craft flight control this is an important characteristic
as the most difficult to identify aerodynamic model
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
105

2.8 3 3.2 3.4 3.6 3.8
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
open loop response
estimated
linear
real
2.8 3 3.2 3.4 3.6 3.8
−5
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
closed loop response
estimated
linear
real
Figure 6: Angular acceleration estimation output.
2.8 3 3.2 3.4 3.6 3.8
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
open loop response
2.8 3 3.2 3.4 3.6 3.8
−5
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
closed loop response
estimated
linear
real
estimated
linear
real
(a) b = 1
2.8 3 3.2 3.4 3.6 3.8
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
open loop response
2.8 3 3.2 3.4 3.6 3.8
−5
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
closed loop response
estimated
linear
real
estimated
linear
real
(b) b = 2
2.8 3 3.2 3.4 3.6 3.8
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
open loop response
2.8 3 3.2 3.4 3.6 3.8
−5
0
5
10
Time (seconds)
roll acceleration (rad/s
2
)
closed loop response
estimated
linear
real
estimated
linear
real
(c) b = 3
Figure 7: Estimation output with delay α.
part is grouped with the state-only dependent dynam-
ics, usually requiring extensive work, such as wind
tunnel tests or numeric fluid dynamic simulations.
This is what makes the INDI control algorithm an
attractive choice for flight control architectures, as it
only requires the modelling and identification of the
aerodynamics actuation part. This section demon-
strates the INDI robustness to wind disturbances (for
better results visualization, we only present the results
with constant wind).
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
106

2 3 4 5 6
0
5
10
15
step response − σ < 1
Time (s)
roll (deg)
reference
σ = 1
σ = 0.4
σ = 0.3
(a) σ < 1
2 3 4 5 6
0
5
10
15
20
step response − sigma > 1
Time (s)
roll (deg)
reference
σ = 1
σ = 2
σ = 3
σ = 5
(b) σ > 1
Figure 8: Robustness to inertia uncertainty - results assum-
ing perfect sensors.
2 3 4 5 6
0
5
10
15
20
step response − σ < 1
Time (s)
roll (deg)
reference
σ = 1
σ = 0.5
σ = 0.4
(a) σ < 1
2 3 4 5 6
0
5
10
15
20
step response − sigma > 1
Time (s)
roll (deg)
reference
σ = 1
σ = 1.5
σ = 2
σ = 3
(b) σ > 1
Figure 9: Robustness to inertia uncertainty - results with
angular acceleration estimation.
2 3 4 5 6
0
5
10
15
20
25
step response
Time (s)
roll (deg)
reference
100 Hz
50 Hz
33.3 Hz
20 Hz
Figure 10: Sampling frequency sensitivity test.
As the designed controller only concerns the
quadrotor attitude stabilization, we will only consider
the disturbances in terms of torques, which are de-
scribed by
τ
τ
τ
D
= D
r
ω
ω
ω
2
a
(39)
where D
r
is a rotational drag coefficient matrix and
ω
ω
ω
a
is the true air relative angular rate.
The tests concern the quadrotor response to con-
stant wind steps of different values, namely the con-
troller actuation torque request and respective atti-
tude.
In figure 11 we present the INDI obtained, namely
the torque request in 11(a) and the quadrotor roll an-
gle in 11(b). The INDI controller shows a quick but
small torque to counteract the wind disturbance. As
a result of this torque, we can observe the roll an-
gle increasing in the first 0.2 seconds, followed by
a decrease and stabilization at 0 degrees before the
mark of 0.8 seconds, demonstrating the expected dis-
turbance rejection of this solution.
After the system stabilizes we apply a step of 15
degrees to the roll reference so we can observe if the
quadrotor maneuvers correctly under the wind distur-
bance.
Figure 12 shows the INDI control action request
(fig. 12(a)) to the roll reference step, and respective re-
sponse (fig. 12(b)). The control action shows a small
variation for different wind intensities, guaranteeing
the insensitivity of the roll response to the increase of
the wind intensity.
7 CONCLUSIONS
This paper presents the incremental version of the
nonlinear dynamics inversion control approach, and
applies it to the quadrotor attitude control problem.
The theoretical formulation of INDI is presented
alongside with the NDI formulation for a better com-
parison of approaches. The same is done when the
INDI formulation is applied to the specific case of
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
107

0 0.2 0.4 0.6 0.8 1
−0.03
−0.02
−0.01
0
Time (s)
Torque (Nm)
0 m/s
1 m/s
2 m/s
5 m/s
10 m/s
15 m/s
(a) Torque τ
x
request
0 0.2 0.4 0.6 0.8 1
0
0.05
0.1
0.15
0.2
Time (s)
Roll (deg)
ref
0 m/s
1 m/s
2 m/s
5 m/s
10 m/s
15 m/s
(b) Roll response
Figure 11: INDI response to constant wind disturbance.
2.5 3 3.5 4 4.5
−0.1
0
0.1
0.2
Time (s)
Torque (Nm)
0 m/s
1 m/s
2 m/s
5 m/s
10 m/s
15 m/s
(a) Torque τ
x
request
2.5 3 3.5 4 4.5
0
5
10
15
Time (s)
Roll (deg)
ref
0 m/s
1 m/s
2 m/s
5 m/s
10 m/s
15 m/s
(b) Roll response
Figure 12: INDI response to roll step reference with con-
stant wind disturbance.
the quadrotor attitude control. This is done after the
quadrotor model is presented, and it allows us to bet-
ter acknowledge the specificities of the approaches.
While NDI is a model-based approach, dependent on
an accurate system model, the INDI solution substi-
tutes this model knowledge requirement by accurate
sensor measurements and/or variables estimation, and
high enough sampling times.
For an easier and more straightforward INDI con-
trol design, this paper addresses implementation is-
sues like INDI parameter tuning, linear control de-
sign and angular acceleration estimation. INDI is an
intrinsically integrative control approach, where the
present control action is obtained varying the previ-
ously applied control action. We show that this vari-
ation should be weighted similarly to an integrative
term in PID control, and demonstrate this by simulat-
ing the closed-loop response for different weights.
We demonstrate the INDI robustness to model un-
certainties varying the quadrotor inertia. We show
that, in this case, the INDI approach handles an iner-
tia estimation variation between 0.5 and 1.5 times the
true value, considering real sensors and estimators.
An underlying assumption in INDI is that the con-
troller sampling rate is higher than the system higher
frequency in order to neglect states variation between
samples. A sensitivity analysis to the controller sam-
pling frequency is also done, showing that the INDI
performance is indeed compromised by this parame-
ter choice. However, given the processing capabilities
of today’s processors, the bottleneck for this choice
lies not in the processor capacities but rather on the
acquisition rates of the existing sensors set.
Finally, results demonstrate the robustness of the
solution in the presence of wind disturbances. The
INDI controller not only is able to reject the distur-
bance but is also able to properly follow attitude ref-
erences even with increased wind intensity.
ACKNOWLEDGEMENTS
This work was supported by FCT, through IDMEC,
under projects LAETA (UID/EMS/50022/2013).
REFERENCES
Azinheira, J., Moutinho, A., and Carvalho, J. (2015). Lat-
eral control of airship with uncertain dynamics us-
ing incremental nonlinear dynamics inversion. IFAC-
PapersOnLine, 48(19):69–74.
Bastin, G. (2013). On-line estimation and adaptive control
of bioreactors, volume 1. Elsevier.
Esteves, D., Moutinho, A., and Azinheira, J. (2015). Sta-
bilization and altitude control of an indoor low-cost
quadrotor: design and experimental results. In Proc.
2015 IEEE International Conference on Autonomous
Robot Systems and Competitions, pages 150–155,
Vila Real, Portugal. IEEE.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
108

Goman, M. and Kolesnikov, E. (1998). Robust nonlinear
dynamic inversion method for an aircraft motion con-
trol. AIAA Paper, pages 98–4208.
Krstic, M., Kokotovic, P. V., and Kanellakopoulos, I.
(1995). Nonlinear and adaptive control design. John
Wiley & Sons, Inc.
Liao, F., Wang, J. L., and Yang, G.-H. (2002). Reliable ro-
bust flight tracking control: an lmi approach. Control
Systems Technology, IEEE Transactions on, 10(1):76–
89.
Mallikarjunan, S. and et al. (2012). L1 adaptive controller
for attitude control of multirotors. In AIAA Guid-
ance, Navigation, and Control Conference, pages 1–
15, Minnesota, USA. AIAA.
Sadeghzadeh, I., Mehta, A., and Zhang, Y. (2011).
Fault/damage tolerant control of a quadrotor heli-
copter UAV using model reference adaptive control
and gain-scheduled PID. In AIAA Guidance, Navi-
gation, and Control Conference, pages 1–13, Oregon,
USA. AIAA.
Sieberling, S., Chu, Q., and Mulder, J. (2010). Robust
flight control using incremental nonlinear dynamic in-
version and angular acceleration prediction. Journal
of guidance, control, and dynamics, 33(6):1732–1742.
Simpl
´
ıcio, P., Pavel, M., Van Kampen, E., and Chu, Q.
(2013). An acceleration measurements-based ap-
proach for helicopter nonlinear flight control using in-
cremental nonlinear dynamic inversion. Control En-
gineering Practice, 21(8):1065–1077.
Stevens, B. and Lewis, F. (2003). Aircraft control and sim-
ulation. John Wiley & Sons.
Quadrotor Attitude Control using Incremental Nonlinear Dynamics Inversion
109
