
Nonlinguistic Information Extraction by Semi-Supervised Techniques
Maria Semenkina, Shakhnaz Akhmedova and Eugene Semenkin
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskiy Rabochiy ave., 31, Krasnoyarsk, 660014, Russia
Keywords: Nonlinguistic Information Extraction, Semi-supervised Learning, Bio-inspired Algorithms, Evolutionary
Algorithms.
Abstract: The concept of nonlinguistic information includes all types of extra linguistic information such as factors of
age, emotion and physical states, accent and others. Semi-supervised techniques based on using both
labelled and unlabelled examples can be an efficient tool for solving nonlinguistic information extraction
problems with large amounts of unlabelled data. In this paper a new cooperation of biology related
algorithms (COBRA) for semi-supervised support vector machines (SVM) training and a new self-
configuring genetic algorithm (SelfCGA) for the automated design of semi-supervised artificial neural
networks (ANN) are presented. Firstly, the performance and behaviour of the proposed semi-supervised
SVMs and semi-supervised ANNs were studied under common experimental settings; and their workability
was established. Then their efficiency was estimated on a speech-based emotion recognition problem.
1 INTRODUCTION
Nowadays different types of information
technologies that try to emulate human-human
interaction are involved in different fields: decision
support systems, distance higher education,
monitoring of terrorist threats, call processing in call
centres and others. Intelligent dialogue systems
(IDS) must not only make some formulaic answers
but use human-like behaviour, for example, they
must take into account the user’s emotions to adapt
its answers for the particular speaker. This means
IDS have to use not only linguistic information, but
also nonlinguistic information (Yamashita, 2013).
The concept of nonlinguistic information includes
all types of extra linguistic information such as
factors of age, emotion and physical states, accent
and others (Campbell, 2005).
Different types of machine learning techniques
can be used for the extraction of nonlinguistic
information, for example, artificial neural networks
(ANN) or Support Vector Machines (SVM). The
usual method of such “machine” extraction demands
the long work of human experts in its initial stages
to prepare the learning data, a process which
includes such complex tasks as the lablling of large
numbers of examples. Semi-supervised techniques
can use both labelled and unlabelled data to
construct appropriate models (Zhu and Goldberg,
2009). In this case it is not nessecary to label all of
this large number of examples, but just a few of
them.
In this study we use several semi-supervised
techniques, such as semi-supervised support vector
machines (Bennett and Demiriz, 1999) and semi-
supervised artificial neural networks trained by
evolutionary algorithms
The rest of the paper is organized as follows: in
Section 2 the problem description is given; in
Section 3 we give some information on semi-
supervised support vector machines tarained by the
cooperation of biology related algorithms (COBRA);
in Section 4 different variants of semi-supervised
artificial neural networks trained by a self-
configuring genetic algorithm (SelfCGA) are
described; in Section 5 we consider the outcomes of
numerical experiments; and in the last section some
conclusions and directions of further investigations
are presented.
2 PROBLEM DESCRIPTION
In the cases of both supervised and semi-supervised
learning for speech-based nonlinguistic information
extraction, some learning data are needed.
312
Semenkina, M., Akhmedova, S. and Semenkin, E.
Nonlinguistic Information Extraction by Semi-Supervised Techniques.
DOI: 10.5220/0006438703120317
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 312-317
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Generally, any approach applied to this recognition
problem contains the step of acoustic characteristic
extraction.
An appropriate set of acoustic characteristics
representing any speech signal was introduced at the
INTERSPEECH 2009 Emotion Challenge. This set
of features comprises attributes such as power,
mean, root mean square, jitter, shimmer, 12 MFCCs,
5 formants and the mean, minimum, maximum,
range and deviation of the pitch, intensity and
harmonicity. The number of characteristics is 384.
To get the conventional feature set introduced at
INTERSPEECH 2009, the Praat (Boersma, 2002) or
OpenSMILE (Eyben, 2010) systems might be used.
In this study the emotional database was
considered. It consists of labelled emotional
utterances which were spoken by actors. Each
utterance has one of the emotional labels, neutral or
strong. The average time of one record is 2.7
seconds. It contains 3210 examples, 426 of them
belong to a neutral class. We used this dataset for the
preliminary testing of semi-supervised techniques
before the implementation in a real problem with
unlabelled data.
So during the algorithm run only 10% of the data
set will be used as labelled data (321 examples). The
rest will be considered as unlabelled.
3 SEMI-SUPERVISED SUPPORT
VECTOR MACHINES
In Support Vector Machines (SVM), the aim is to try
to create a separating hyperplane between the
instances from different classes (Vapnik and
Chervonenkis, 1974). SVM is based on the
maximization of the distance between the
discriminating hyperplane and the closest examples.
In other words since many choices could exist for
the separating hyperplane, in order to generalize
well on test data, the hyperplane with the largest
margin has to be found.
Suppose =
,
,…,
,
, is a training
set with l examples (instances), each instance has m
attributes and x
i
is labelled as y
i
, where =1,
. Let v
be a hyperplane going through the origin, δ be the
margin and =
. The margin maximizing hyper-
plane can be formulated as a constrained
optimization problem in the following manner:
1
2
‖
‖
→
∙
≥1
To solve the mentioned optimization problem the
proposed cooperation of biology related algorithms
or COBRA was used (Akhmedova and Semenkin,
2013).
However, in this study semi-supervised SVMs
were considered. Thus, given the additional set =
,…,
of unlabelled training patterns, semi-
supervised support vector machines aim at finding
an optimal prediction function for unseen data based
on both the labelled and the unlabelled part of the
data (Joachims, 1999). For unlabelled data, it is
assumed that the true label is the one predicted by
the model based on what side of the hyperplane the
unlabelled point ends up being.
In this study, self-training was used to learn from
the unlabelled data. Namely, the idea is to design the
model with labelled data and then use the model’s
own predictions as labels for the unlabelled data to
retrain a new model with the original labelled data
and the newly labelled data and then iteratively
repeat this process.
The problem with this method is that it can suffer
from “semantic drift”, where considering its own
predictions as true labels can cause the model to drift
away from the correct model. The model would then
continue to mislabel data and use it again and
continue to drift farther and farther away from where
it should be. To prevent this problem, in (Ravi,
2014) the model’s predictions to label the data were
used only when there was a high level of confidence
about the predictions.
The notion of confidence used for the SVM
model is the distance from the found hyperplane.
The larger the distance from the hyperplane, the
more confident we can be because this means the
item is deeper in the space of the class the SVM
thinks the item belongs to and thus it is likely it
should be on the other side of the SVM.
So, the following basic steps were carried out:
Train SVM on the labelled set L by the
proposed meta-heuristic approach COBRA;
Use the obtained SVM to classify all
unlabelled instances from U by checking the
confidence criteria from (Ravi, 2014);
Label instances from the set U if this is
possible;
Repeat from the first step.
4 SEMI-SUPERVISED ANN
AUTOMATED DESIGN
The appropriate structure of ANN must be chosen
for the effective solving of the problem. Below we
Nonlinguistic Information Extraction by Semi-Supervised Techniques
313

consider a genetic algorithm (GA) for the choice of
the number of layers, the number of neurons in each
layer and the type of the activation function of each
neuron for the multi-layered perceptron in the case
of semi-supervised learning.
4.1 ANN in Binary String
First of all, we choose the perceptron with 5 hidden
layers and 5 neurons in each hidden layer as the
maximum size of the structure for ANN. Each node
is represented by a binary string of length 4. If the
string consists of zeros (“0000”) then this node does
not exist in ANN. So, the whole structure of the
neural network is represented by a binary string of
length 100 (25x4); each 20 variables represent one
hidden layer. The number of input neurons depends
on the problem in hand. ANN has one output layer.
We use 15 activation functions such as a bipolar
sigmoid, a unipolar sigmoid, Gaussian, a threshold
function and a linear function. For determining
which activation function will be used on a given
node, the integer that corresponds to its binary string
is calculated.
Thus, we use optimization methods for problems
with binary variables for finding the best structure
and the optimization method for problems with real-
valued variables for the weight coefficient
adjustment of each structure.
Although the automated design of the ANN
structure by self-adapting optimization techniques
improves their efficiency, it can work unsatis-
factorily with large real-world problems. Therefore,
the automation of the most important input selection
can have a significant impact on the efficiency of
neural networks. In this paper, we use additional bits
in every string for the choice of relevant variables to
put them in model. The number of these bits equals
the number of input variables. If this bit is equal to
‘0’ then the corresponding input variable is not used
in the model and is removed from the sample.
During initialization, the probability for a variable to
be significant will be equal to 1/3. This idea can help
end users to avoid the significant and complicated
procedure of choosing the appropriate set of input
variables with the necessary impact on the model
performance.
For the choice of more flexible models, more
sophisticated tools must be used.
4.2 Self-configuring Genetic Algorithm
If the decision is made to use evolutionary
algorithms for solving real world optimization
problems, it will be necessary to choose an effective
variant of algorithm parameters such as the kind of
selection, recombination and mutation operators.
Choosing the right EA setting for each problem is a
difficult task even for experts in the field of
evolutionary computation. It is the main problem in
effectively implementing evolutionary algorithms
for end users. We can conclude that it is necessary to
find the solution for the main problem of
evolutionary algorithms before suggesting for end
users any EA application for the automated design
of tools for solving real world problems.
We propose using the self-configuring
evolutionary algorithms (SelfCEA) which do not
need any end user efforts as the algorithm itself
adjusts automatically to the given problem. In these
algorithms (Semenkin, 2012), the dynamic
adaptation of operators’ probabilistic rates on the
level of the population with centralized control
techniques is applied.
Instead of adjusting real parameters, setting
variants were used, namely the types of selection
(fitness proportional, rank-based, and tournament-
based with three tournament sizes), crossover (one-
point, two-point, as well as equiprobable, fitness
proportional, rank-based, and tournament-based
uniform crossovers (Semenkin, 2012)), population
control and level of mutation (medium, low, high for
two mutation types). Each of these has its own initial
probability distribution which is changed as the
algorithm executes.
This self-configuring technique can be used both
for the genetic algorithm (SelfCGA). In (Semenkin,
2012) SelfCGA performance was estimated on 14
test problems from (Finck, 2009). The statistical
significance was estimated with ANOVA.
Analysing the results related to SelfCGA
(Semenkin, 2012), it can be seen that self-
configuring evolutionary algorithms demonstrate
higher reliability than the average reliability of the
corresponding single best algorithm but sometimes
worse than the best reliability of this algorithm.
SelfCGA can be used for the automated choice
of effective structures and weight tuning of ANN-
based predictors. For such purposes, classification
accuracy can be used as a fitness function.
4.3 Semi-Supervised ANN Design by
Evolutionary Algorithms
Generally, any supervised techniques contain two
stages:
1. extracted attributes or the most relevant of them
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
314

should be involved in the supervised learning
process to adjust a classifier;
2. and then the trained classification model receives
an unlabelled feature vector to make a prediction.
The method of genetic algorithm implementation
in such a case was described above.
However, in the case of semi-supervised
techniques, the following basic steps have to be
implemented (Chapelle, 2006):
1. Train ANN on the labelled set;
2. Use the obtained ANN to classify all unlabelled
instances from U by checking the confidence
criteria;
3. Label instances from the set U if this is possible;
4. Repeat from the first step.
The main question is: “Which ANN from the
population of ANNs will be making the decision
about labelling some example?”. There are two
possible answers:
1. The best individual in the generation will be used
for labelling examples if the confidence criterion
is met (SelfCGA-ANN-Elitism);
2. All population members will vote and if the
majority of them will be confident in one
decision, the example will be labelled (SelfCGA-
ANN-Ensemble).
The second important question is: “Do we have
to train just ANN weights or automatically design
the ANN structure?”. There are two possible
answers:
1. Only weight coefficients of ANN will be
adjusted (SelfCGA-ANN-w);
2. The complete ANN will be designed, including
both the ANN structure design and the adjusting
of weights (SelfCGA-ANN).
And the last question is: “How often should we
stop the evaluation process and begin the process of
labelling for test (unlabelled) data?”.
1. The SelfCGA for the automated ANN structure
design has to make a pause every 5 generations,
try to label the data and after this continue its
work with new a learning set (additional
examples that took label).
2. The SelfCGA for ANN weights training have to
make a pause every 10 generations, try to label
data and after that continue its work with a new
learning set (additional examples that took the
label).
5 EXPERIMENTAL RESULTS
At the first stage of experiments, we tested all
algorithm variants on one artificial and two real-
world problems that will be described in Table 1. All
these data sets are classification problems and for
the testing of semi-supervised techniques, each data
set instance was randomly split into two parts: one
labelled and one unlabelled – and different ratios for
the particular settings were used.
First of all, one well-known artificial problem
was considered, namely the two-dimensional
“Moons” data set (Jain, 2005). This problem is
known to be a complex problem for semi-supervised
techniques and a very simple problem for humans.
This is why it is often used as a test problem for
different machine learning algorithms and became a
classical test problem for them. It consists of two
groups of moon-like sets of points and it has a
separating hyperplane between them. So it has a
non-linear structure that makes it difficult for semi-
supervised support vector machines. In this
experiment, the starting learning set contains only 4
labelled examples, 2 from one class and 2 from
another one that were randomly chosen. All other
examples must be labelled during the run.
The usual results obtained on the “Moons”
problem are shown in Figure 1 (COBRA-SVM) and
Figure 2 (SelfCGA-ANN). As can be seen, the
algorithms do not recognize all the points correctly.
However, most of the points are in the right class.
COBRA-SVM builds an almost linear classification,
SelfCGA-ANN-Ensemble builds a more complex
separating hyperplane. The best result was shown by
SelfCGA-ANN-Elitism, it usually made mistakes
only on 1-2 points. It is probable that SelfCGA-
ANN-Ensemble excessively averaged single ANN
results.
Table 1: Data sets, considered in the experimental
evaluation, each consisting of n patterns having d features.
Data Set Name Example’s
number
Input
number
Moons 200 2
Breast Cancer Wisconsin 699 9
Pima Indians Diabetes 768 8
Then two medical diagnostic problems, namely
Breast Cancer Wisconsin and Pima Indian Diabetes
(Frank and Asuncion, 2010), were solved. Both
problems are binary classification tasks. For these
data sets, 10 examples were randomly selected to be
used as labelled examples, and the remaining
instances were used as unlabelled data. The
Nonlinguistic Information Extraction by Semi-Supervised Techniques
315

Figure 1: Semi-supervised classification of “Moons” by COBRA-SVM.
Figure 2: Semi-supervised classification of “Moons” by SelfCGA-ANN-Ensemble.
experiments are repeated 50 times and the average
accuracies and standard deviations are recorded.
Alternative algorithms (linear SVMs) for
comparison are taken from (Li and Zhou, 2011). The
results are shown in Table 2.
As can be seen, COBRA-SVM and SelfCGA-
ANN are sufficiently effective for solving semi-
supervised problems.
At the second stage of experiments, we tested all
algorithm variants on speech-based emotion
recognition problems that had 384 features and only
321 randomly selected instances in the initial
learning set (stratified sampling) and 2889 instances
which were used as unlabelled ones. The
experiments are repeated 50 times and the average
accuracies and range of variation are recorded in
Table 3. In all experiments, weighted accuracy
was
assessed to compare the quality of classification.
The statistical robustness of the results obtained was
confirmed by ANOVA tests, which were used for
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
316
processing the received evaluations of our
algorithms’ performance.
The classification quality is relatively high even
with only 10% of labelled examples in the training
set. This result gives the possibility to use a small
amount of data labelled by experts with a huge
amount of available unlabelled data for nonlinguistic
information extraction in the future.
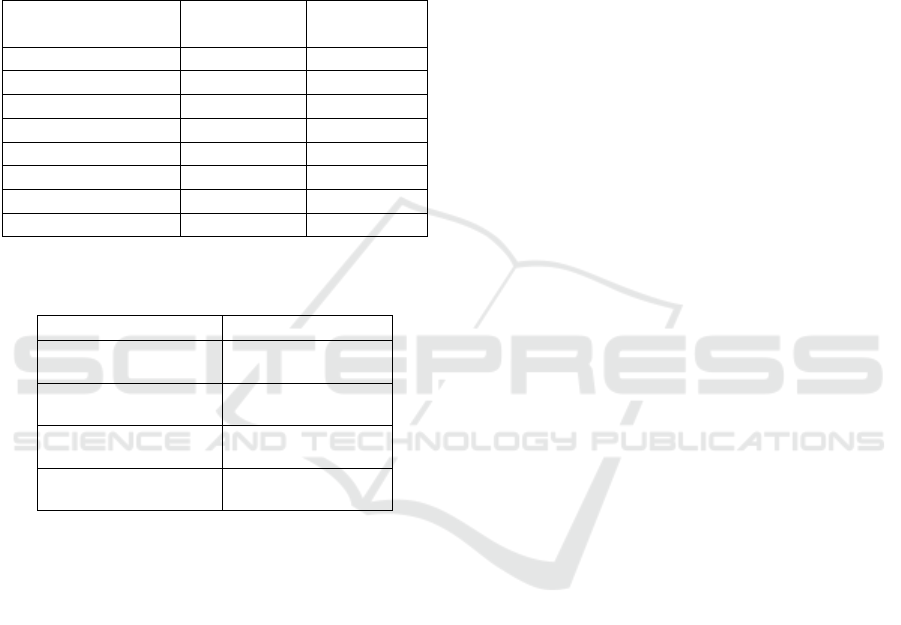
Table 2: Performance comparison for medical diagnostics
problems.
Algorithm’s Name
Breast Cancer
Wisconsin
Pima Indians
Diabetes
TSVM 89.2±8.6 63.4±7.6
S3VM-c 94.2±4.9 63.2±6.8
S3VM-p 93.9±4.9 65.6±4.8
S3VM-us 93.6±5.4 65.2±5.0
COBRA-SVM 95.5±1.8 69.3±1.5
SelfCGA-ANN-w 94.8±2.1 66.7±2.3
SelfCGA-ANN-Elit. 96.5±1.9 69.4±1.8
SelfCGA-ANN-Ens. 95.6±1.3 68.7±1.5
Table 3: Performance comparison for emotion recognition
problem.
Algorithm’s Name
F-score
COBRA-SVM
0.8799
[0.8763; 0.8832]
SelfCGA-ANN-Elit.
0.8864
[0.8794; 0.8901]
SelfCGA-ANN-Ens.
0.8807
[0.8775; 0.8849]
SelfCGA-ANN-w
0.8582
[0.8534; 0.8623]
6 CONCLUSIONS
The possibility to use semi-supervised classification
for nonlinguistic information extraction is important
due to the fact that getting labelled examples is often
very expensive and sometimes must be repeated for
any new person. However, using unlabelled data
during classification may be helpful. In this paper, the
semi-supervised SVM was trained using a
cooperative algorithm and semi-supervised ANNs
were automatically designed by SelfCGA for solving
semi-supervised classification problems in the field of
speech-based emotion recognition. The results show
that the proposed approaches are sufficiently effective
for solving this kind of problems. The comparison of
their results show that models with a more complex
structure, for example, ANNs with a more flexible
structure, can give better results.
ACKNOWLEDGEMENTS
This research is partially supported by Grant of the
President of the Russian Federation for state support
of young Russian scientists (MK- 3378.2017.9).
REFERENCES
Akhmedova, Sh., Semenkin, E., 2013. Co-Operation of
Biology related Algorithms. In IEEE Congress on
Evolutionary Computations. IEEE Publications.
Bennett, K.P., Demiriz, A., 1999. Semi-supervised support
vector machines. Advances in Neural Information
Processing Systems 11.
Boersma P., 2002. Praat, a system for doing phonetics by
computer. Glot international, vol. 5, no. 9/10, pp.
341–345.
Campbell N., 2005. Developments in corpus-based speech
synthesis: Approaching natural conversational speech,
IEICE Trans. Inf. Syst., E88-D, 376–383.
Chapelle O., Zien A., Schoelkopf B. (Eds.), 2006. Semi-
supervised learning. MIT Press.
Eyben F., Wllmer M., and Schuller B., 2010. Opensmile:
the Munich versatile and fast opensource audio feature
extractor. Proceedings of the international conference
on Multimedia,. ACM, pp. 1459–1462.
Finck, S. et al., 2009. Real-parameter black-box
optimization benchmarking 2009. In: Presentation of
the noiseless functions. Technical Report Researh
Center PPE.
Jain A. and Law M., 2005. Data clustering: A user's
dilemma. Lecture Notes in Computer Science. 3776: p.
1-10.
Joachims, T., 1999. Transductive inference for text
classification using support vector machines. In
International Conference on Machine Learning.
Ravi, S., 2014. Semi-supervised Learning in Support
Vector Machines. Project Report COS 521.
Semenkin, E.S., Semenkina, M.E., 2012. Self-configuring
Genetic Algorithm with Modified Uniform Crossover
Operator. Advances in Swarm Intelligence, Lecture
Notes in Computer Science 7331, Springer-Verlag,
Berlin Heidelberg, pp. 414-421.
Vapnik, V., Chervonenkis, A., 1974. Theory of Pattern
Recognition, Nauka. Moscow.
Zhu, X., Goldberg, A.B., 2009. Introduction to Semi-
Supervised Learning. Morgan and Claypool.
Li, Y.F., Zhou, Z.H., 2011. Improving Semi-Supervised
Support Vector Machines through Unlabeled Instances
Selection. In The Twenty Fifth AAAI Conference on
Artificial Intelligence.
Yamashita Y., 2013. A review of paralinguistic
information processing for natural speech
communication. Acoust. Sci. & Tech. 34, 2, pp. 73-79.
Nonlinguistic Information Extraction by Semi-Supervised Techniques
317
