
A Simulation–based Optimization Approach for Stochastic Yard
Crane Scheduling Problem with Crane Mobility Constraints
Frobin M. Mnale
1
, Mohamed S. Gheith
2
and Amr B. Eltawil
1
1
Department of Industrial Engineering and Systems Management, Egypt-Japan University of Science and Technology,
Alexandria, Egypt
2
Production Engineering Department, Alexandria University, Alexandria, Egypt
Keywords: Container Terminals, Stochastic Scheduling, Mobility Constraints, Simulation-based Optimization.
Abstract: With the fast-paced growth in containerized trade market the need for effective and efficient operations at
container terminals is a critical factor in freight transport. One major contributing factor of terminal efficiency
is the productivity of Yard Cranes (YC) resulting from YC scheduling. In this paper, the stochastic YC
Scheduling Problem (YCSP) is presented aspiring to provide a new yard cranes analysis through operational
attributes of the container handling process. A stochastic mixed integer programming model is proposed, and
a simulation-based optimization procedure introduced to build YC schedules that account for the dynamic
and uncertainty nature of container handling process in container terminals.
1 INTRODUCTION
Over the past 30 years, freight transportation has
rapidly developed, it is now an indicator of the
economic growth of countries in global freight
operations. Therefore, the effective and efficient
management of Container Terminal (CT) is important
in the contribution of economic growth. These
advancements in freight transportation and
information technology have brought new challenges
and complications that associate with CT operations.
As of 2014, it was estimated that the container flows
from largest ports in the world to be 68.4 Million TEU
(twenty-foot equivalent unit; a 20 ft. × 8ft× 8.5 ft.).
This increase raised a logistic concern all over the
most important ports and the world (UNCTAD 2015).
Nowadays, terminal competitiveness in global
freight network is directly affected by the storage
yard activities (Zhen 2013a). This is due to
containerization growth which leads to high vessel
turn around time. However, alleviation of vessel
turnaround time requires integration between various
operations to ensure better performance of terminal
operations (Vis and De Koster 2003). Consequently,
It is important to decide on the planning of
operational activities as well as selecting right
handling equipment on storage yard activities to
facilitate a seamless flow of containers in the port
(Wiese et al. 2010).
A container terminal is an essential node in an
open system and dynamic flow of containers
materials. Terminals operate under two external
interfaces of operations to serve container vessels
(Steenken et al. 2005). Moreover, container terminal
can be classified into five main areas namely; berth,
quay, transport areas, yard storage, and terminal gate.
Berth and quay areas considered as the seaside
operations, while the yard and gate areas are in the
landside operations (Vis and De Koster 2003). For
instance, (Lau and Zhao 2008) addressed vessel
operations comprise of loading and discharging tasks,
where containers are loaded and unloaded to/ from a
ship and stacked or retrieved in a storage yard.
Furthermore, they explained three types of material
handling equipment; Quay Cranes (QCs), Automated
guided vehicles (AGVs), and Automatic Stacking
Cranes (ASCs) that connect seaside and landside
operations.
Fig. 1.Show the schematic diagram of automated
container terminal whereas, the storage yard is
composed of multiple blocks perpendicular to vessel
Each yard block contains an adjacent stretch of slots
(40 -60 slots) and each slot denoted as a rectangle in
a diagram can store 6 – 9 containers.
296
Mnale, F., Gheith, M. and Eltawil, A.
A Simulation–based Optimization Approach for Stochastic Yard Crane Scheduling Problem with Crane Mobility Constraints.
DOI: 10.5220/0006440902960303
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 296-303
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Schematic diagram of an automated container
terminal.
In the automated terminal, container handling from/to
the transportation trucks is carried at the extremities
of the storage blocks. Consider, for example, Hong
Kong international terminal is one of the busiest
terminals in the world, this terminal received over
10,000 trucks and 15 containers ships a day (Phan and
Kim 2016). Fig. 2. Show the trends of the global
turnover of the largest seaports.
In this paper, yard crane scheduling problem
(YCSP) is presented, and framework approach of a
problem based on current research trends is
demonstrated. We have established literature review
classification following leading attributes that arise in
the scheduling of storage equipment in the block; (1)
yard layouts, (2) yard crane mobility characteristics,
(3) solution methods approach, and (4) Performance
measure and uncertainty. These attributes will be
more or less in chronological order in our work.
Figure 2: World turnover of largest seaport (IHS 2016).
The remainder of the paper is organized as follows, in
section 2 of the paper detailed description of the
storage yard crane problem followed by yard storage
analysis in section 3 and section 4, simulation
framework of the YCSP. In section. Five conclusions
and the future prospect are summarized.
2 PROBLEM DESCRIPTION
In this section, yard crane scheduling problem
(YCSP) is modeled as an integer program. We seek
to develop a mathematical model describing the
attributes of yard crane schedule to sequence the
stacking and retrieving of containers in a block. Based
on two main factor, mobility rules and uncertainty,
some important assumption for the formulation have
been constructed.
a) The planning horizon is apportioned into T
small time periods (weeks, beginning t = 1)
b) The volume of a particular task group should
not exceed the capacity of the YC given that
all tasks in a single bay should be a group of
one task.
c) The YC movements are within a block and
should be non-crossing with a safety
distance between cranes.
d) All job in a block are assumed as discrete
operations, and the task will be grouped in a
different segment of the block whereas
arriving vessels and external truck represent
the tasks to be handled.
e) At the beginning of rolling horizon, all yard
cranes are available, the estimated time of
operation and start time of processing of
tasks are known.
f) Each yard crane has same productivity.
Parameter
I set of all jobs I = {1, 2…n} to be handled
K set of identical yard cranes K= {1, 2}
Rt
i
ready time of job i
L
i
location of job i
Tt
ij
time required for yard cranes to travel from L
i
to L
j
h time required by a yard crane to handle one
job.
Decision variables
Z
i
(U
i
,V
i
) the handling time window for job I
U
i
the time at which the yard crane assigned to
handle job i
V
i
completion time of job i
t
i
arrival time of the yard crane assigned to job i
ϴ completion time of the yard crane k
1 if yard crane k handle job i before job j
20,1
20,6
24,2
30,9
36,5
0, 10, 20, 30, 40,
Hong Kong
Ningbo
Shenzhen
Singapore
Shanghai
Throughput (in Milion TEUs)
A Simulation–based Optimization Approach for Stochastic Yard Crane Scheduling Problem with Crane Mobility Constraints
297

0 otherwise.
Y
i
YC assigned to handle job i
The model follows below
(1)
(2)
(3)
(4)
(5)
V
i
= U
i
+ h, i = 1… n
(6)
U
i
= max {Rt
i
, t
i
}, i = 1… n
(7)
V
j
- V
i
≥ Tt
ij
+ h – (1-
M, i, j = 1… n
|i ≠ j
(8)
(Y
i
– Y
j
) (L
i
– L
j
) > 0 if
i, j = 1…, n | i j
(10)
V
j
+ Tt
iT
– ϴ ≤ M (1–
), j=1… n, k=1..m
(11)
{0, 1}, i, j = 1… n, k = 1… m
(12)
V
i
, U
i
, t
i
, ϴ ≥ 0, i = 1… n, k = 1… m
(13)
Y
i
{1, 2…} i = 1… n
(14)
The objective is to minimize the completion time
of the yard crane operation by constraint (1).
Carrying out all group task sequence: constraints (2)
-(4), to ensure the completion of all workgroup by
yard crane. Each task should be carried out by single
YC and should follow after the last task group
handled by YC. Constraint (5) ensure the balance
flow of cranes during travels. Handling time requests
constraints (6) – (7), to make sure that the start time
of the task group to be later than its estimated time,
also the start time of task group should be later than
YC completion time. Movement of yard crane
constraints (8) – (9) define the move time for each
yard crane from the current location to the next one.
Then, ensure mobility integration (non-crossing) of
yard crane in the block. Constraint (10) ensure that
the completion time for each yard crane is defined.
Binary variable by constraint (11). Non-negative
integer variables in constraints (12) and (14)
This study has considered, deviation of process
time and start time of handling a task simultaneously.
These deviance factors arise due to the lateness
arrival of the vessel or external truck that leads to
work delays.
3 YARD STORAGE OPERATION
This section discusses yard storage operations and
introduces cranes as primary equipment in yard
block. The cranes perform stacking and retrieving
operations of the containers while integrating with
quay cranes and transport vehicles (Zhen 2013a). In
the various practical and theoretical studies, yard
crane scheduling problem has been presented in two
categories; Rail Mounted Gantry Crane (RMGC) and
Rubber Tire Gantry Crane (RTGC). The two types
operate in different rules. RMGCs are automated and
work in intra-block operation. On contrary RTGCs
are manually operated, and work on various zones in
the yard storage (Gharehgozli et al. 2014).
3.1 Yard Storage Layout
A typical yard storage layout determines the
containers placement and a network of operations;
each block has material handling equipment (yard
crane) serving a block or multiple blocks. A standard
block is made of several rows each with bays so that
container can be stored in several tiers depending on
the capability of equipment used to stack them (Liu et
al. 2004). There are two types of yard layout
configurations; (1). Non-automated (2) Automated
yard layout. The main differences observed in their
design is the position of the input/output point (
container exchange position of yard vehicle and
cranes), the level of automation used and the block
position to quay; horizontal/vertical (Lee and Kim
2013).
Conventional yard layout configuration mostly
used in container terminals in the world. It has blocks
arranged parallel/horizontal to the quay. Fig.3. Show
the schematic diagram of the typical configuration of
conventional yard storage layout. Usually, one or
more rows in each block are reserved for internal and
external transfer vehicles as truck lanes. In this
configuration, cranes travel in vehicle lanes for
stacking and retrieving tasks. Each yard block
contains adjacent slots and each slot denoted as
rectangle in a diagram can store 6 – 9 containers. On
contrary automated yard layout mostly employed in
Europe and few Asia ports, blocks are perpendicular/
vertical to the quay. Input and output points are
located at both ends of the storage block where
automatic guided vehicle pick up containers at
seaside and external truck at land.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
298

Figure 3: Schematic diagram of conventional terminal
layout.
3.2 Crane Mobility Characteristics
Dispatching standards and setting of yard cranes
routes indicate the operational mobility attributes
employed in the storage area. Yard crane follow the
dispatching rule in the block finding the optimal
paths. (Narasimhan and Palekar 2002) studied yard
operation by considering a single YC which retrieves
and stack container in a single block. Some of the
articles have also addressed retrieval and stacking
requests operation simultaneously. (Zhang et al.
2002) formulated a mixed integer programming
model for YC problem under a given workload in
multiple blocks. Their objective was to minimize the
unfinished workload defined as either retrieval or
stacking.
(Ng et al. 2005) studied multiple crane scheduling
problem for non-crossing cranes in a single block.
They developed a branch and bound algorithm for a
large size problem to minimize the total delay time
for all requests. (Lee et al. 2006) presented loading
sequence requirements in the schedule considering
two non-crossing yard crane in separate blocks. The
authors developed a genetic algorithm to find the
solution. Likewise, (Li et al. 2009) introduced a
discrete time model for automatic stacking cranes to
minimize the earliness and lateness combination of all
request in their due course. They proposed a dynamic
rolling horizon algorithm, to ensure the real-time
update of the schedule for all tasks. (Vis and Carlo
2010) formulated the same setting. However, the
stacking cranes can pass through one another, but
they cannot work in the same bay. the request of all
activities has neither due times nor sequence. They
developed a mathematical model to minimize
makespan for both cranes and applied simulated
annealing-based heuristic to solve the large instance
of the problem; the authors concluded that numerical
solution based on heuristic solutions are within 2% of
the large instance and 6% for a small instance of the
problem.
3.3 Solution Method Approaches
Most of the research papers in yard cranes scheduling
problem in literature are described in mathematical
modeling. Such as; linear, nonlinear, and mixed
integer programming models. Due to the
computational complexity of solving these models to
optimality, advanced techniques such as heuristics,
meta-heuristic, and algorithms used to address the
problem to approximate solution. Therefore, we
categorize these into two branches; exact solution
methods and approximate solution methods.
3.3.1 Exact Solution Methods
Exact solutions are widely used in formulating
mathematical models for the purpose of developing
adjusted patterns in some parameter to get exact
solutions.(Cheung et al. 2002) formulate a mixed
integer program of the YC scheduling problem to
minimize the total workload of tasks. Numerical
experiment results, concluded the solution approach
was effective and efficient for large-sized problems.
Moreover, (Lee et al. 2007) developed a
mathematical model for scheduling of two transtainer
systems. The objective was to reduce total loading
time on two-yard crane moving in the separate blocks.
They used simulated annealing (SA) to solve the
proposed model. Numerical experiment results
concluded that the completion time of SA introduced
was 10% above lower bound and performance of the
algorithm is extraneous to some of the containers
loaded. In some cases YC problems use combination
exact and approximate solutions in finding a result,
for instance (Cao et al. 2008) formulated a mixed
integer program to provide an efficient operation
strategy for loading outbound container. Using a dual
rail mounted gantry crane they developed a greedy
heuristic algorithm and simulated annealing
algorithm to solve the problem. (Wiese et al. 2010)
formulated integer linear program for container
layouts in yard operations, they expressed restricted
model to a square storage yard and added a Variable
Neighbourhood Descent (VND) heuristic for solving
yard operations’ problems with an arbitrary shape.
Their study shows that the VND heuristic provides
the trade-off of time and solution quality by economic
results for 43% of the instances.
3.3.2 Approximate Solution Methods
Due to the compound nature of YC scheduling
problems, research studies use approximate solutions
to achieve a near optimal results in solving large
instances of the problems. In their paper (Kozan and
A Simulation–based Optimization Approach for Stochastic Yard Crane Scheduling Problem with Crane Mobility Constraints
299

Preston 1999) introduced genetic algorithms for the
optimization of container transfer in maritime
terminals. The goal was to find the optimal storage
strategy and schedule for handling container in a yard.
(Chen et al. 2004) addressed yard storage
optimization in Singapore port, to minimize space
allocation of cargo in a designated yard and satisfy
space requirement. They used the combinatory
heuristic method to solve the problem. Results
concluded that a traditional heuristic approach
achieves relatively better results in a short time by
10% above margin.
(Dell’Olmo and Lulli 2004) considered container
as a network of complex substructures or platform to
address resource allocation problem to minimize the
total delay time in the overall system and on the time
horizon. They introduced a dynamic programming
approach tackling large size problem and conclude
that the percent is 6.3% above the lower bound of the
solution. In recent years (Burke et al. 2012) proposed
an empirical analysis on comparing Monte Carlo
based hyper-heuristics for solving capacitated
timetabling problems in the automated terminals.
They applied a simulated annealing to accompany the
hyper-heuristic on finding the approximate solution.
Their proposed approach claims to prove the new
precisely technique to schedule automated cranes.
3.4 Performance Measure and
Uncertainty
Dynamic operations that subsist during loading and
unloading of the container may affect the
performance of cranes operations if overlooked. The
effects may occur due to the failure of equipment,
delay of vessel/truck arrival time, incorrect
information of vehicles or ship and human errors.
3.4.1 Uncertainties
The arrival time of ships/external trucks may affect
the performance of the terminal, for example, (Zhen
et al. 2011) proposed an optimization model for berth
allocation problem under uncertainty of vessel arrival
time and handling time to obtain a robust schedule.
However, the same settings were used in (Zhen and
Chang 2012) to formulate a mathematical model
under two objectives on stochastic consideration of
vessel arrival and operation time. (Zhen 2013b)
presented the decision support system (DSS) that
replaced the traditional system of operation. By
introducing real-life events of uncertainty in yard
allocation problem. This decision support system
enabled port operators to cope with the adjustable
volume of arriving containers.
(Golias et al. 2014) proposed a berth scheduling
problem. The schedule minimizes the total service
times for serving all vessels, they formulated a
discrete mathematical model and used a heuristic to
find a robust schedule.Furthermore, (Jun-Liang et al.
2016) addressed yard crane scheduling where,
handling time, vessel and truck arrival were assumed
to be dynamic with different service priorities. They
developed mixed integer programming, and
simulation based genetic algorithm search was
applied to develop a robust YC schedule.
3.4.2 Performance Measure
Performance metrics such as crane makespan, crane
utilization, and vessel turnaround time indicate the
level of efficiency achieved by the terminals during
processes. For instance, (Petering and Murty 2009)
considered a restriction on the system would prevent
the system from being disturbed by outside factors
such as trucks/vessel arrival, they developed
performance measures using the rule-based control
system that deploys cranes among blocks on the same
zone of operation. (Borgman et al. 2010) investigated
the effect of vessel departure time and stacking point
of container on the overall performance of container
terminal. The discrete-event simulation tool was
developed for analysis, and it was found that
minimizing departure time proved to be significant on
reshuffle and performance of container terminals.
Furthermore (Bortfeldt and Forster 2012) proposed a
heuristic tree search procedure for container
relocation problem taking into account effect of the
height of stacks in the overall performance of the
stacking operations. They compared their method
with.
3.4.3 Emerging Issues
The performance of the container terminal is
measured on the capacity to accustom a large number
of vessels and minimum vessel turnaround time.
However, handling capacity increase with an increase
in the size of the terminal. Recently large operating
terminals have considered a direct impact of handling
equipment on the cost of energy consumption. In (Xin
et al. 2014) addressed the energy-aware control in
scheduling automated terminal by considering the
behavior of the terminal under two operating level;
higher level and lower level represented by discrete
event dynamics and continuous dynamics
respectively. They further elaborated latter level
obtained of minimal value to achieve minimum
energy consumption while maintaining operational
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
300

time constraints. Also, (He et al. 2014) addressed the
pollutants generated from the yard activities
mentioning carbon dioxide as a threat to the
environment. They developed mixed integer
programming model and solved the problem in a
vehicle routing procedures. To account for the total
energy associated in yard crane.
4 SIMULATION FRAMEWORK
OF STOCHASTIC YARD
CRANE SCHEDULING
PROBLEM
A proposed framework seek to develop a yard crane
schedule considering the effects of mobility and
capture realistic environment. This framework put
together an optimization program and a simulation
model of a yard crane operations. The objective is to
minimize the total yard crane completion time and
penalty costs that are associated with operational
uncertainties. The optimization program will generate
an initial feasible solution to be used into the
simulation model as initial input data. Initially, the
simulation model will evaluate the current and total
costs based on the positional values of crane and
efficiency measures (such as speed, start time and
recovery time of operation, when there is equipment
failure or late arrival of ship/trucks). Then model
outputs will be returned to the optimization program
checking the optimality. Consequently, this
simulation-based optimization is an optimization on
the basis of the simulation results to capture the
dynamic nature of operations and the uncertainties. As
it can be seen in fig.4 simulation model of yard crane
is the core component, while the optimization is the
central program for evaluation.
Optimization Program: the program constitutes of
mathematical model built with mixed integer
programming, and it will follow the following steps;
Initial data generation of the yard activities
this will include block characteristics, the
number of cranes, handling efficiency and
the distribution of crane service time also
berth and gate features which include
vessel/truck size and their probabilities of
arrival and the distribution of inter-arrival
time between successive vessel/truck.
Simulation initiation: The optimization
program transfer the initial data into the
simulation, and activates evaluation process
in the simulation program to get vessel/truck
waiting times and the berth utilization ratio.
Objective function assessment: After the
simulation is complete, the program returns
the results to the optimization program, and
the optimization program evaluates the total
time and costs.
Decision: optimization program assesses the
initial solution from the simulation by
comparing the total costs. If the designed
total cost is minimal, the system stops and
outputs the optimal design and schedule and
the corresponding decision. Otherwise, it
returns to data generation stage and go on to
the next iterative operation
Simulation Model: This involves submodule for
vessel/truck arrival and handling operation module.
To help capture the realistic part of the yard operation
especially in a block, berth, and gate. To be able to
incorporate the effect of crane utilization on the
schedule that will reduce unnecessary penalty cost that
may occur during the process.
5 CONCLUSIONS
This paper conducted analysis and introduced a new
classification of the stochastic yard crane scheduling
problem. Although, few articles have addressed the
stochastic nature of the problem, yet the majority of
research paper have overlooked its effects in
scheduling cranes. A mathematical model was
developed, and simulation-based optimization
framework is proposed for solving these new
attributes of the problem. Hence, based on the analysis
of literature introduced, no study has addressed the
integration of uncertainty factors and mobility settings
in scheduling yard cranes. This confirms a gap for
future work which will focus on the generation of
optimal solutions results and improvements that
would allow considering larger instances of the
problem.
A Simulation–based Optimization Approach for Stochastic Yard Crane Scheduling Problem with Crane Mobility Constraints
301
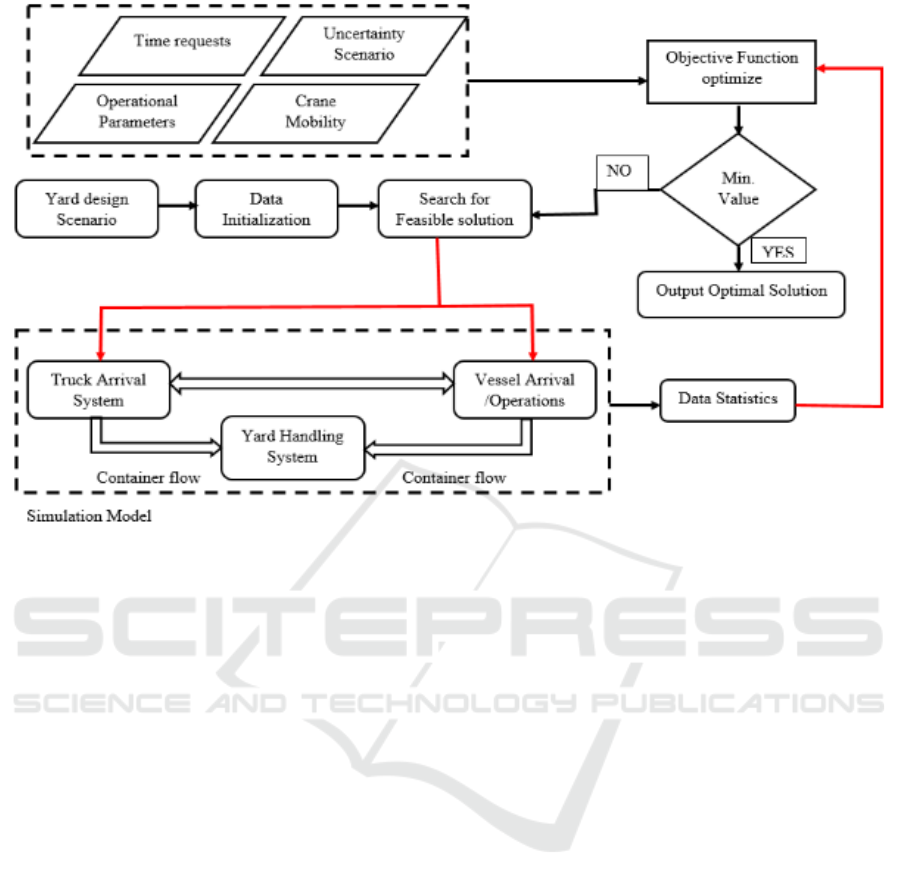
Figure 4: Simulation-based optimization flowchart for YCSP.
ACKNOWLEDGEMENTS
This research project is sponsored by the Pharco
Corporation Graduate Scholarship to the Egypt-Japan
University of Science and Technology (E-JUST) and
support of the Japanese International Cooperation
Agency (JICA).
REFERENCES
Borgman, B., van Asperen, E., and Dekker, R. 2010.
“Online rules for container stacking,” OR Spectrum
(32:3), pp. 687–716.
Bortfeldt, A., and Forster, F. 2012. “A tree search procedure
for the container pre-marshalling problem,” European
Journal of Operational Research (217:3), pp. 531–540.
Burke, E. K., Kendall, G., Misir, M., and Özcan, E. 2012.
“Monte Carlo hyper-heuristics for examination
timetabling,” Annals of Operations Research (196:1),
pp. 73–90.
Cao, Z., Lee, D. H., and Meng, Q. 2008. “Deployment
strategies of double-rail-mounted gantry crane systems
for loading outbound containers in container
terminals,” International Journal of Production
Economics (115:1), pp.
Chen, P., Fu, Z., Lim, A., and Rodrigues, B. 2004. “Port
yard storage optimization,” IEEE Transactions on
Automation Science and Engineering (1:1), pp. 26–37.
Cheung, R. K., Li, C.-L., and Lin, W. 2002. “Interblock
Crane Deployment in Container Terminals,”
Transportation Science (36:1), pp. 79–93.
Dell’Olmo, P., and Lulli, G. 2004. “Planning activities in a
network of logistic platforms with shared resources,”
Annals of Operations Research (129:1990), pp. 155–
169.
Gharehgozli, A. H., Laporte, G., Yu, Y., and de Koster, R.
2014. “Scheduling Twin Yard Cranes in a Container
Block,” Transportation Science (49:3), pp. 686–705.
Golias, M., Portal, I., Konur, D., Kaisar, E., and Kolomvos,
G. 2014. “Robust berth scheduling at marine container
terminals via hierarchical optimization,” Computers &
Operations Research (41), pp. 412–422.
He, J., Huang, Y., and Yan, W. 2014. “Yard crane
scheduling in a container terminal for the trade-off
between efficiency and energy consumption,”
Advanced Engineering Informatics (29:1), Elsevier Ltd,
pp. 59–75.
IHS. 2016. “The largest container ports worldwide - cargo
throughput 2015 | Ranking,” (available at
https://www.statista.com/statistics/264171/turnover-
volume-of-the-largest-container-ports-worldwide/;
retrieved September 11, 2016).
Jun-Liang, H., Wei, Y., Yu-Ting, Z., and You-Fang, H.
2016. “A Proactive Approach for Yard Crane
Scheduling Problem with Stochastic Arrival and
Handling Time,” International Journal of Hybrid
Information Technology (9:2), pp. 389–406.
Kozan, E., and Preston, P. 1999. “Genetic algorithms to
schedule container transfers at multimodal terminals,”
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
302

International Transactions in Operational Research
(6), pp. 311–329.
Lau, H. Y. K., and Zhao, Y. 2008. “Integrated scheduling
of handling equipment at automated container
terminals,” International Journal of Production
Economics (112:2), pp. 665–682.
Lee, B. K., and Kim, K. H. 2013. “Optimizing the yard
layout in container terminals,” OR Spectrum (35:2), pp.
363–398.
Lee, D.-H., Cao, Z., and Meng, Q. 2007. “Scheduling of
two-transtainer systems for loading outbound
containers in port container terminals with simulated
annealing algorithm,” International Journal of
Production Economics (107:1), pp. 115–124.
Lee, D.-H., Meng, Q., and Cao, Z. 2006. “Scheduling Two-
Transtainer Systems for Loading Operation of
Containers Using Revised Genetic Algorithm.,”
Li, W., Wu, Y., Petering, M. E. H., Goh, M., and Souza, R.
de. 2009. “Discrete time model and algorithms for
container yard crane scheduling,” European Journal of
Operational Research (198:1), pp. 165–172.
Liu, C. I., Jula, H., Vukadinovic, K., and Ioannou, P. 2004.
“Automated guided vehicle system for two container
yard layouts,” Transportation Research Part C:
Emerging Technologies (12:5), pp. 349–368.
Narasimhan, A., and Palekar, U. S. 2002. “Analysis and
Algorithms for the Transtainer Routing Problem in
Container Port Operations,” Transportation Science
(36:1), pp. 63–78.
Ng, W. C., Mak, K. L., and Taylor, P. 2005. “An effective
heuristic for scheduling a yard crane to handle jobs with
different ready times,” Engineering Optimization
(37:731604565), pp. 867–877.
Petering, M. E. H., and Murty, K. G. 2009. “Effect of block
length and yard crane deployment systems on overall
performance at a seaport container transshipment
terminal,” Computers and Operations Research (36:5),
pp. 1711–1725.
Phan, M. H., and Kim, K. H. 2016. “Collaborative truck
scheduling and appointments for trucking companies
and container terminals,” Transportation Research
Part B: Methodological (86), Elsevier Ltd, pp. 37–50.
Steenken, D., Vo??, S., and Stahlbock, R. 2005. “Container
terminal operation and operations research - A
classification and literature review,” Container
Terminals and Automated Transport Systems: Logistics
Control Issues and Quantitative Decision Support, pp.
3–49.
UNCTAD. 2015. Review of Maritime Transport 2015
Unctad.
Vis, I. F. A., and Carlo, H. J. 2010. “Sequencing Two
Cooperating Automated Stacking Cranes in a Container
Terminal,” Transportation Science (44:2), INFORMS
, pp. 169–182.
Vis, I. F. A., and De Koster, R. 2003. “Transshipment of
containers at a container terminal: An overview,”
European Journal of Operational Research (147:1), pp.
1–16.
Wiese, J., Suhl, L., and Kliewer, N. 2010. “Mathematical
models and solution methods for optimal container
terminal yard layouts,” OR Spectrum (32:3).
Xin, J., Negenborn, R. R., and Lodewijks, G. 2014.
“Energy-aware control for automated container
terminals using integrated flow shop scheduling and
optimal control,” Transportation Research Part C:
Emerging Technologies (44), pp. 214–230.
Zhang, C., Wan, Y., Liu, J., and Linn, R. J. 2002. “Dynamic
crane deployment in container storage yards,”
Transportation Research Part B: Methodological
(36:6), pp. 537–555.
Zhen, L. 2013a. “A Review on Yard Management in
Container Terminals,” Industrial Engineering &
Management Systems (12:4), pp. 289–304.
Zhen, L. 2013b. “Storage allocation in transshipment hubs
under uncertainties,” International Journal of
Production Research (52:1), Taylor & Francis, pp. 72–
88.
Zhen, L., and Chang, D.-F. 2012. “A bi-objective model for
robust berth allocation scheduling,” Computers &
Industrial Engineering (63:1), pp. 262–273.
Zhen, L., Lee, L. H., and Chew, E. P. 2011. “A decision
model for berth allocation under uncertainty,”
European Journal of Operational Research (212:1), pp.
54–68.
A Simulation–based Optimization Approach for Stochastic Yard Crane Scheduling Problem with Crane Mobility Constraints
303
