
An Energy Aware Scheduling for Reconfigurable Heterogeneous Systems
Ines Ghribi
1
, Riadh Ben Abdallah
1
and Mohamed Khalgui
1,2
1
LISI Laboratory, National Institute of Applied Sciences and Technology, University of Carthage, Tunis, Tunisia
2
Faculty of Science of Tunis, University of Tunis el Manar, Tunis, Tunisia
Keywords:
Embedded Systems, Scheduling, Probability, DVFS.
Abstract:
One of the major challenges of computer system design is the management and conservation of energy while
satisfying QoS requirements. Recently, Dynamic Voltage and Frequency Scaling (DVFS) has been integrated
to various embedded processors as a mean to increase the battery life without affecting the responsiveness
of tasks. This paper proposes an enhancement for I-codesign methodology [1] optimizing the energy con-
sumption of the designed system.We propose an energy aware real-time scheduling algorithm. This algorithm
makes use of the defferable server for the scheduling of aperiodic tasks along with DVFS. Simulation results
demonstrate a decrease in the resulting energy consumption compared to the previously published work.
1 INTRODUCTION
Energy consumption is one of the major limiting fac-
tors of battery powered real-time systems. In this con-
text, optimizing energy consumption without affect-
ing performance while satisfying real time constraints
is of major interest. To meet the timing constraints
of the system, a scheduler must coordinate a set of
tasks at different states (idle, blocked, running) and
asks the run-time system to allocate the required re-
sources to their execution. Many objectives must be
considered in the design of a scheduling algorithm: (i)
Guarantee that tasks with hard timing constraints will
always meet their deadlines, (ii) Attain a high degree
of schedulable utilization for hard deadline tasks, (iii)
Provide fast average response time for tasks with soft
deadlines (aperiodic tasks).
To obtain an energy-efficient design, the Dynamic
Voltage and Frequency Scaling (DVFS) feature is
widely adopted in modern processors (Horowitzet al.,
1994). The basic idea of the DVFS strategy is to re-
duce a processor’s processing frequency, as long as
task’s timing constraints are not violated. Indeed, the
power consumption of the processor is a polynomial
of the processing frequency, generally with a degree
no less than 2 (Li, 2012), while the overall execution
time of a task is just inversely proportional to the pro-
cessing frequency. DVFS provides the possibility of
minimizing energy consumption given a certain per-
formance/timing requirement.
In an early work, we proposed a methodology
called I-codesign for reconfigurableco-design (Ghribi
et al., 2016a). I-codesign presents an abstract model
for hardware/software systems allowing early explo-
ration of hardware/software trade-offs and evaluation
of design alternatives. This model supports incremen-
tal refinement and evaluation at multiple abstraction
levels. Its aim is to lead to an efficient implementation
and improve overall system performance. The entry
point for I-codesign is a hardware/software specifi-
cation modeled by a DAG (Directed Acyclic Graph)
where nodes are software functions. I-codesign maps
this specification into a hardware architecture that is
mainly an MPSoC. It also defines a new partition-
ing and mapping techniques for the proposed hard-
ware/software model: a functional algorithm fol-
lowed by a constructive algorithm and finally an it-
erative algorithm for optimization. Based on several
design constraints such as inclusion/exclusion, com-
munication costs, energy, memory, real-time feasibil-
ity and probabilistic estimations, I-codesign takes de-
cisions of near-optimal placement of software func-
tions into the target hardware units.
In this paper, we investigate the opportunity of re-
ducing power consumption of the system to be de-
signed according to I-codesign methodology and thus
by introducing the DVFS feature in the proposed
scheduling algorithm. We study the scheduling of
a heteregenous task set modeled and partitioned ac-
cording to the I-codesign methodology. An energy
aware real-time scheduling algorithm for probabilis-
tic heterogeneous task set is introduced in order to
enhance the I-codesign power consumption and re-
sponse time metrics. DVFS is applied on periodic
Ghribi, I., Abdallah, R. and Khalgui, M.
An Energy Aware Scheduling for Reconfigurable Heterogeneous Systems.
DOI: 10.5220/0006460701710177
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 171-177
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
171

tasks in order to reduce energy consumption without
compromising periodic function deadlines and ape-
riodic functions responsiveness. In order to apply
the proposed scheduling algorithm periodic functions
priorities have been redefined according to two con-
straints : (i) the edge probability connecting the func-
tion to their predecessors in the task DAG, (ii) Func-
tion hierarchy which refers to the level of the corre-
sponding function on the task DAG representation.
The originality of this work resides in including the
probabilistic estimation of the task’s execution not
only in the mapping process but also in the scheduling
algorithm. The consideration of the precedence con-
straint through the proposed DAG hierarchy rule does
cooperate and improve the overall system scheduling
performance.
The paper proceeds as follows. The next Sec-
tion describes useful background. Section III presents
the I-codesign methodology. In Section IV, the sys-
tem formalization and the notations used in this pa-
per are developed. Section V exposes the proposed
algorithm. Section VI shows simulation results of
scheduling of real-time tasks and finally we conclude
this paper in Section IV.
2 RELATED WORK
This section reviews the main approaches for schedul-
ing a mixture of aperiodic tasks and periodic hard
real-time tasks. The easiest way to prevent aperi-
odic tasks from interfering with periodic hard real-
time tasks is to schedule them as background tasks
executing only at times when there is no periodic task
ready for execution. Although this method guarantees
the schedulability of a periodic task, the execution
of aperiodic tasks may be delayed and their response
times are prolonged unnecessarily. The polling server
is a periodic task with a period Ts, a capacity Cs
and the highest priority (Li-yong et al., 2010). Ev-
ery server’s activation, it checks if there are any pend-
ing aperiodic tasks, if there are, the server uses its
capacity to service them until either the task is fin-
ished or the server’s capacity is depleted. However,
if there is no pending aperiodic task, the server re-
mains idle until its next activation which means that
even if an aperiodic request occurs in the middle of
the server’s servicing time, the request will not be
treated until the next period as the server will already
be inactive (Liyong et al., 2010). The Priority Ex-
change (PE) and Deferrable Server (DS) algorithms,
introduced by Strosnider in (Strosnider et al., 1995),
overcome the drawbacks associated with polling and
background servicing of aperiodic requests. As with
polling, the PE and DS algorithms create a periodic
task (usually of a high priority) for servicing aperi-
odic requests. However, unlike polling, these algo-
rithms will preserve the execution time allocated for
aperiodic service if, upon the invocation of the server
task, no aperiodic requests are pending. These algo-
rithms can yield improved average response times for
aperiodic requests because of their ability to provide
immediate service for aperiodic tasks. The DS algo-
rithm maintains its aperiodic execution time for the
duration of the server’s period. Thus, aperiodic re-
quests can be serviced at the server’s high priority at
anytime as long as the server’s execution time for the
current period has not been exhausted. At the begin-
ning of the DS’s period, the server’s high priority ex-
ecution time is replenished to its full capacity. Unlike
the DS algorithm, the PE algorithm preserves its high
priority execution time by exchanging it for the exe-
cution time of a lower priority periodic task (Desokey
et al., 2006). The DS algorithm can provide better
aperiodic responsiveness than polling because it pre-
serves its execution time until it is needed by an ape-
riodic task. The DS algorithm is a simple algorithm
to implement than the PE algorithm, because the DS
algorithm always maintains its high priority execution
time at its original priority level and never exchanges
its execution time with lower priority levels as does
the PE algorithm. It also requires less memory space
than the PE and much lower computational complex-
ity.
During the past two decades, tremendous works
have been done regarding energy-aware scheduling
on DVFS-enabled platforms. The application of
DVFS algorithm to periodic task set is a well known
research area (Tchamgoue et al., 2012; Ansari et al.,
2013). However, few works in literature focuses on
DVFS applied to heterogeneous task set comprising
of periodic and aperiodic tasks (Dongkun and Jihong,
2004; Shin and Kim, 2006). The DVFS algorithm fo-
cuses on the usage and distribution of available slack
time. The total time required by a task to run com-
pletely i.e. the actual execution time (aet) is always
less than its worst case execution time (wcet). The
difference that exists is the slack and it in turn, is uti-
lized for reducing the voltage and frequency dynami-
cally.
This paper proposes a new scheduling algorithm with
original evaluation metrics for priority calculation
along with the defferable server for the scheduling
algorithm. In this work, DVFS is incorporated into
the scheduling process in order to dynamically rede-
fine the scheduled element’s periodicity and reduce
the energy consumption.
ICSOFT 2017 - 12th International Conference on Software Technologies
172

3 I-CODESIGN METHODOLOGY
The goal of I-codesign is to achievea concurrent hard-
ware/software system design. It acts on a probabilis-
tic task model to a hardware architecture in a manner
that fulfills all the system requirements and respects
the design constraints. I-codesign deals with a set of
models and transformations. The main idea behind I-
codesign is the use of the probabilistic task model in
mapping which embeds useful data for the mapping
and further optimization steps. Figure 1 presents the
flow diagram of the I-codesign methodology.
I-Codesign Module
Functional Partioning
Hierarchical Partioning
Unsatisfied Constraint
ok
Unsatisfied Constraint
Kernighan-Lin
Unsatisfied Constraint
ok
Add Task to Mapping Table
Switch Cluster
Create Cluster
Switch Cluster
Create Cluster
Switch Cluster
Create Cluster
ok
Figure 1: I-codesign methodology Flow Diagram.
The first step is the functional partitioning algo-
rithm. It evaluates the inclusion/exclusion constraints
between task functions and creates clusters depending
on this constraint. Couples that are concerned with
inclusion or exclusion constraints are placed in either
the same or different clusters. Once all the inclusions
and exclusions are evaluated, a feasibility analysis is
performed. If all clustered functions sets on the cre-
ated clusters are schedulable on one of the available
processors then the schedulability test is validated.
Otherwise, the functional partitioning is applied again
to create new clusters with schedulable function sets.
Since any inclusion/exclusion constraint is hard, the
clustered tasks are locked and cannot be moved any
more. The second phase is the hierarchical partition-
ing algorithm. It clusters the remaining functions that
have no inclusion/exclusion constraints. The func-
tions are evaluated by their connecting edge’s prob-
abilities and high probability values are treated first.
The available memory space is evaluated at each itera-
tion. Once all the remaining functions are placed into
clusters a feasibility analysis is performed. If all the
functions sets on the created clusters are schedulable
on one of the available processors then the schedu-
lability test is validated. Otherwise, the hierarchi-
cal clustering is applied again to generate clusters
with schedulable function sets. The last phase is the
kernighan-Linoptimization algorithm. This step eval-
uates both probability and communication cost on the
edges connecting functions by gain calculation. If the
gain is positive, then the function is moved to another
cluster if its energy consumption on the other cluster
is less or equal to its energy consumption on the orig-
inal cluster. Otherwise it is left on the original cluster.
4 SYSTEM MODEL AND
PROBLEM DEFINITION
4.1 Task Model
The software model comprises a set of tasks T
i
, i
∈ [1..N] represented by a directed acyclic graph T
i
=
(V
i
, E
i
), where (i) V
i
is a set of nodes that corre-
spond to functions, and (ii) E
i
is a set of arcs which
describe connection between functions. The edges
are weighted with a couple ≺ Pr,Cc ≻ where Pr is
the probability of executing this edge and Cc is the
communication cost of data transfer between the two
nodes connected with the edge. A task T
i
is a set of n
periodic functions F= {F
1
, F
2
, .., F
n
}. Each function
F
i
is described by quadruplet F
i
= (R
i
, C
i
, P
i
, D
i
) where
R
i
is the phase, C
i
is the wcet, P
i
is the period and D
i
is the deadline of the i
th
periodic function. There are
m aperiodic functions A= {A
1
, A
2
, .., A
m
}. Each func-
tion A
i
is described by doublet A
i
= (Ar
i
, C
i
) where Ar
i
is the arrivaltime andC
i
is the execution time of the i
th
aperiodic function A
i
. Figure 2 presents an example
of the task model composed of six periodic functions
and two aperiodic functions. The following notations
are used in the rest of the paper:
• EdgeProba(F
i
) returns the highest probability of
the edges connecting F
i
to its predecessors; For
example EdgeProba(F
5
) returns 1,
• Level(F
i
) returns the level of F
i
on the DAG; For
example level(F
3
) returns 2.
We also defined inclusion/exclusion constraint. It
is used to impose at a couple of functions and/or be-
haviors to be executed either on the same computing
unit or on different ones. The exclusion constraint
An Energy Aware Scheduling for Reconfigurable Heterogeneous Systems
173

F1
A1
A2
F2
0.5/10
0.4/8
0.7/9
F3
F4
F5
F6
0.1/6
0.3/12
0.2/5
1/7
1/13
Level2
Level1
Level3
Figure 2: A task graph.
is modeled within the task representation by marking
the symbol 6⊂ on the function F
i
which means that F
i
must not be executed with its predecessor on the same
computing unit. The inclusion constraint is modeled
by marking the symbol ⊂ on F
i
which means that F
i
must be executed with its predecessor on the same
computing unit.
4.2 Problem Definition
In a previouswork (Ghribi et al., 2016a), I-codesign is
described in detail. For a given task set, I-codesign is
applied and as a result we get an optimized mapping
of the system tasks into the hardware processing ele-
ments. The resulting mapping allows the execution of
all possible reconfigurable scenarios of the designed
system. It reduces the inter-PEs communications and
guarantees the schedulability of tasks.
I-codesign has been developed with the assumption
that all functions are periodic. In this work we address
the scheduling of heterogeneous task set scheduling
while reducing the overall energy consumption of the
system.
5 PROPOSED ALGORITHM AND
EXAMPLE
In this section we present a scheduling algorithm for
heterogeneous task set comprising periodic and aperi-
odic tasks. This algorithm relies on a deffrebaleserver
for aperiodic tasks. Aperiodic functions will be exe-
cuted at the maximum frequency and priority in or-
der to achieve lowest response time whereas utiliza-
tion of periodic functions will be updated according
to the DVFS algorithm. Thus, we defined a defferable
server T
DS
having a period denoted P
DS
and a capacity
denoted C
DS
. For periodic functions, a priority defini-
tion is proposed as follows:
1. ∀ F
i
, F
j
∈ T
i
, if Level(F
i
)
∨
Level(F
j
), then
priority(F
i
)
∨
priority(F
j
),
2. ∀ F
i
, F
j
∈ T
i
, if Level(F
i
)=Level(F
j
) and
EdgeProba(F
i
)
∨
EdgeProba(F
j
), then
priority(F
i
)
∨
priority(F
j
),
5.1 Scheduling Algorithm
The inputs of the proposed algorithm are the follow-
ing : (i) H is the hyper-period of all the periodic tasks
including T
DS
, (ii) PQ is the periodic queue, (iii) AQ
is the aperiodic queue. In our algorithm, we make
use of the following methods: (i) PQ.Sort() is a func-
tion that sorts the periodic queue according the the
DAG hierarchy and the Edge probability of the peri-
odic functions, (ii) AQ.Sort() is a function that sorts
the aperiodic queue according to the arrival time, (iii)
System.Run(F, T
exe
, freq, Voltage) is a function that
executes a function F during a time T
exe
and at the
specified frequency freq and voltage vol, (iv) Sys-
tem.Preempt() is a function that preempts a function
F and (v) AQ.Aperiodic Request() is a system call no-
tifying the scheduler about the arrival of a new ape-
riodic function in AQ. The output of this algorithm
is the next function to be executed with its estimated
scaled frequency f
scaled
and voltage V
scaled
. An ER-
ROR message is generated upon missing deadlines of
any periodic task. Our scheduling algorithm is de-
picted in the following:
Algorithm 1.
1: procedure I-CODESIGN SCHEDULING(VAR PQ: TAB-
PERIODIC, AQ: TAB-APERIODIC, TASKDAG: TREE, T:
TIME
2: for t = 0 to 2H do
3: if (t == 0) or (t mod P
PES
) == 0 then
4: C
PES
= MaxValue;
5: end if
6: if (AQ.Head! = null) then
7: System.Run(AQ.Head,C
PES
, f
max
,V
max
)
8: else FrequencyScaling( PQ, AQ, f
scaled
)
9: System.Run(PQ.Head,ET
PQ.Head
, f
scaled
,V
scaled
)
10: end if
11: if AQ.AperiodicRequest() then
12: System.Preempt()
13: System.Run(AQ.Head,C
PES
)
14: end if
15: end for
16: end procedure
Algorithm 2 implements the frequency scaling for
periodic tasks execution as follows: (i) U
p
is the
utilization of all periodic functions, and (ii) U
DS
is
the utilization of aperiodic functions in the aperiodic
queue.
ICSOFT 2017 - 12th International Conference on Software Technologies
174
Algorithm 2.
1: procedure FREQUENCY SCALING(PQ: TAB-
PERIODIC, AQ: TAB-APERIODIC, VAR f
scaled
:
FREQUENCY)
2: U
p
= 0
3: for i = 0 → length(PQ) do
4: U
p
= U
p
+ PQ[i].C
i
/PQ[i].P
i
5: end for
6: if AQ! = null then
7: U
DS
= C
DS
/P
DS
8: else U
DS
= 0
9: end if
10: U
T
= U
p
+U
DS
11: f
scaled
= min( f
1
, f
2
,.., f
max
)
12: U
T
≤ f
scaled
/ f
max
13: end procedure
The operating frequency selected is the lowest one
for which the modified schedulability test succeeds.
The voltage, of course, is changed to match the op-
erating frequency. This algorithm is called by Algo-
rithm 1 when a periodic function is specified for exe-
cution.
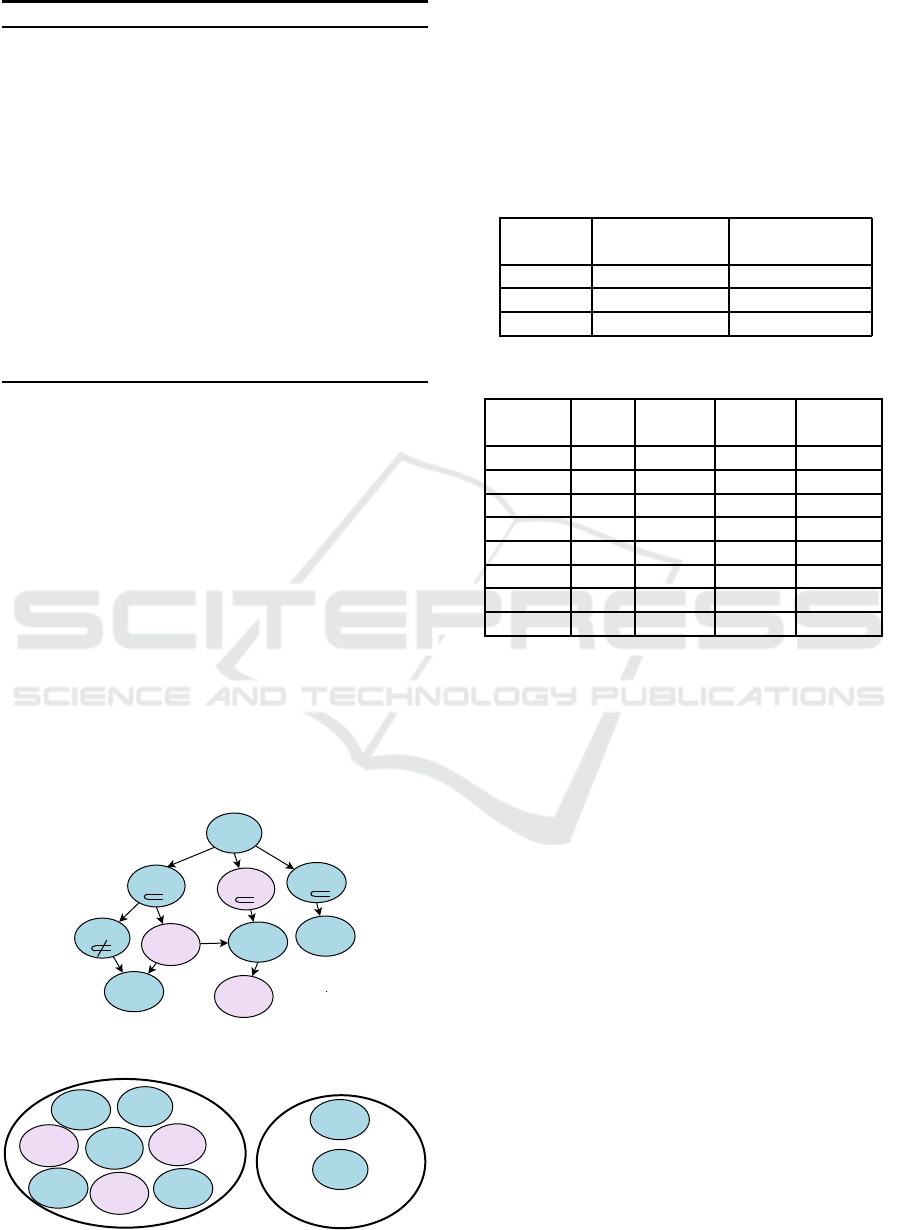
5.2 Example
We propose to apply the proposed algorithm on task
T
1
presented in figure 3. The task is composed of a
set of periodic function F= {F
1
, F
2
, .., F
7
} and ape-
riodic functions A= {A
1
, A
2
, A
3
}. The output of I-
codesign methodologyapplied to T
1
are two partition-
ing clusters. The operating frequencies are f= {0.25,
0.5, 0.75, 1} Ghz.
F1
A1
A2
F2
0.5/10
0.4/8
0.7/9
0.8/12
F3
F4
F5
F7
F6
A3
0.1/6
0.3/12
0.2/5
1/7
1/13
1/9
1/13
Figure 3: Task graph T
1
.
F1
F2
A1
A2
F5
A3
F7
C1
F3
F6
F4
C2
Figure 4: Resulted Clusters after applying I-codesign to T
1
.
The final clusters are presented in figure 4. We
propose to study the scheduling of cluster C1. The
real-time parameters of the periodic and aperiodic
functions are presented in Table-I and Table II.
Table-I describes the aperiodic task set with arrival
time and execution time. Table II describes the peri-
odic tasks proprieties including the defferable server.
Table 1: Aperiodic functions Set.
Function
ID
Arrival Time
Ar
i
Execution
Time C
i
A
1
5 2
A
2
7 2
A
3
21 3
Table 2: Periodic functions Set.
Function
ID
C
i
P
i
D
i
Priority
F
1
5 20 20 1
F
2
3 22 22 2
F
3
6 25 25 3
F
4
3 38 38 4
F
5
2 35 35 5
F
6
2 32 32 6
F
7
5 50 50 7
T
PES
2 5 5 1
In order to schedule the functions associated to the
cluster C1, the PQ and AQ are populated according to
the proposed priority definition and arrival time. For
this example, a high priority server is created with
an execution time of 2 time units and a period of 5
time units. At time= 0, the server’s execution time
is brought to its full capacity. This capacity is pre-
served until the first aperiodic request occurs at time =
5 since there is no pending aperiodic function. Hence,
F
1
is executed. The frequency is scaled at the value
f= 0.75 Ghz. At time= 5, the periodic request occurs
to serve A
1
along with F
2
in the head of the periodic
queue. Clearly, A
1
is serviced at the maximum fre-
quency f= 1 Ghz until time= 7. F
2
and F
3
belong to the
same DAG level, hence the probability on the edges
connecting these functions with F
1
is assessed in or-
der to determine the next function to be executed at
time= 7. F
2
is serviced at a scaled frequency eaqual
to 0.75 Ghz since EdgeProba (F
2
)
∨
EdgeProba (F
3
).
At time= 10, the server’s execution time at priority 1
is brought to its full capacity and is used to provide
immediate service for A
2
at the maximum frequency
f= 1 Ghz. At time= 12, F
3
is serviced since there are
no periodic function with higher edge probability at
its DAG level at the frequency f= 0.75 Ghz followed
by F
5
at time= 18 at a scaled frequency of 0.5 Ghz. At
An Energy Aware Scheduling for Reconfigurable Heterogeneous Systems
175
time= 20, F
1
is serviced until time= 21 at a frequency
f= 0.5 Ghz when it is preempted in order to serve A
3
immediately at the maximum frequency f= 1 Ghz. at
time= 23, F
1
continues its execution at f= 0.75 Ghz.
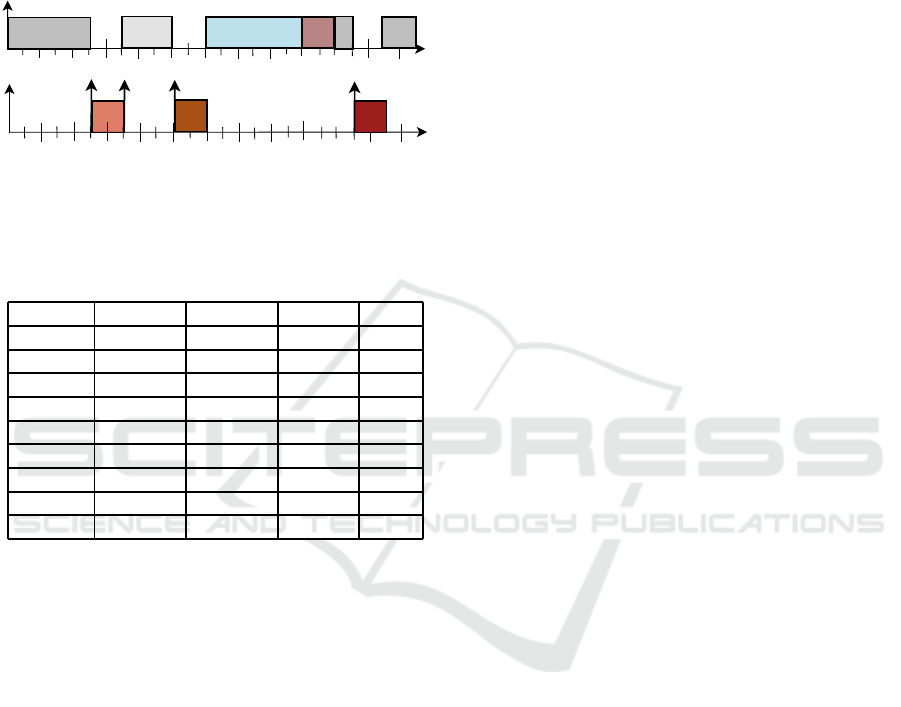
Figure 5 illustrates the time-line scheduling of the ex-
ample as described above.
2
4
8
6
10
12 14 16
18
F1
F2
A1
20
F3
22
24
F1F5
2
4
8
6
10
12 14 16
18
20
22
24
Periodic Requests
Aperiodic Requests
A2
F1
A3
A1
A2
A2
A3
Figure 5: Scheduling time-line of the cluster C1.
Table III shows the resulting schedule of the given
example task in table I and II.
Table 3: Defferable Server Schedule.
Time Released Pending f
scaled
C
PES
0 F
1
– 0.75 2
5 A
1
– 1 0
7 F
2
A
2
0.75 0
10 A
2
– 1 0
12 F
3
– 0.75 0
18 F
5
– 0.5 2
20 F
1
– 0.5 2
21 A
3
F
1
1 0
21 F
1
– 0.75 0
6 SIMULATION RESULTS
In a previous work (Ghribi et al., 2016b), we de-
veloped a co-design execution environment called
SPEX. It provides a toolbox that allows the creation
of a hardware/software system description accord-
ing to the proposed design models and that imple-
ments the I-codesign algorithms. It proposes a flex-
ible task set generator for different scenarios and pur-
poses. The tool places the software specification fol-
lowing several proposed design constraints as inclu-
sion/exclusion parameters, probabilistic execution of
the software tasks, available memory and energy on
the hardware units and real-time parameters. To eval-
uate the new scheduling algorithm several task sets
of different dimensions are generated. The generated
tasks are passed through SPEX and we obtain map-
ping scheme of the task set. We developed a new
simulation module that implements our scheduling al-
gorithm based on defferable server along with DVFS
technique. The simulator populates the periodic and
aperidoic queue, runs the specification according to
function characteristics and generates estimations of
the total execution time and consumed energy.
In order to evaluate the proposed scheduling al-
gorithms, various random task sets are generated ac-
cording to the I-codesign modeling for probabilistic
reconfigurable task sets. These tasks are decomposed
into elementary functions and then characterized with
the different co-design constraints (probability, com-
munication costs, inclusion/exclusion). After apply-
ing the I-codesign algorithms, the resulting mapping
is passed through the scheduling simulator. The
scheduling results are compared to Earliest Deadline
First (EDF) algorithm and the Rate Monotonic al-
gorithm. Figures 6 and 7 present the performance
results of our scheduling algorithm applied to dif-
ferent task sets along with those of EDF and RM.
The comparison between the evaluated approaches
has demonstrated that the new I-codesign schedul-
ing algorithm offers better performance results par-
ticularly with large utilization factors and high num-
ber of nodes on the specification DAGs. These en-
hancements are due to probabilistic estimation of the
communicated functions/behaviors that store depen-
dent tasks with high chances to be executed succes-
sively on same PEs. Simulation results show that this
contribution has many benefits: (i) the energy con-
sumed during the system execution has been notice-
ably reduced and (ii) the global execution time has
been minimized. Another advantage of I-codesign is
its validation tests that includes real-time feasibility
which result in avoiding any system fail due to a lack
of resources.
7 CONCLUSIONS
In this work, an energy aware real-time scheduling al-
gorithm with Dynamic Voltage and Frequency Scal-
ing based on the Defferable Server has been pro-
posed and implemented for mixed task set. This
new scheduling algorithm is developed in order to en-
hance the I-codesign methodology. It considers the
trade-offs between the energy consumption and the
response time. It relies on simple constraints: the
DAG hierarchy and the probability of execution for
periodic functions. It makes use of DVFS technique
in order to reduce the energy consumption of the sys-
tem. Extensive simulation is carried out on our tasks
sets. The results showed that our proposed energy ef-
ficient algorithm succeeds in reducing noticeably the
energy consumption with no degradation in respon-
siveness of aperiodic tasks.
ICSOFT 2017 - 12th International Conference on Software Technologies
176

0 0.2 0.4
0.6
0.8 1
0
20
40
60
80
Utilization
Task set I
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
0 0.2 0.4
0.6
0.8 1
0
20
40
60
80
Utilization
Task set II
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
0 0.2 0.4
0.6
0.8 1
0
20
40
60
80
Utilization
Task set III
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
Figure 6: Simulation Results for Energy Consumption.
0 0.2 0.4
0.6
0.8 1
0
50
100
150
Utilization
task set I
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
0 0.2 0.4
0.6
0.8 1
0
50
100
150
Utilization
task set II
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
0 0.2 0.4
0.6
0.8 1
0
50
100
150
Utilization
task set III
New I-codesign
Old I-codesign
EDF algorithm
RM algorithm
Figure 7: Simulation Results for Execution Time.
REFERENCES
Ansari, K. H., Chitra, P., and Sonaiyakarthick, P. (2013).
Power-aware scheduling of fixed priority tasks in soft
real-time multicore systems. In 2013 IEEE Interna-
tional Conference ON Emerging Trends in Comput-
ing, Communication and Nanotechnology (ICECCN).
Desokey, A. E. E., Gawad, A. A. E., Sarhan, A., and
Moawed, S. (2006). Improving the performance of the
deferrable server based garbage collection scheduling
strategy. In 2006 ITI 4th International Conference on
Information Communications Technology, pages 1–2.
Dongkun, S. and Jihong, K. (2004). Dynamic voltage scal-
ing of periodic and aperiodic tasks in priority-driven
systems. In Proceedings of the 2004 Asia and South
Pacific Design Automation Conference, pages 653–
658, Yokohama, Japan. IEEE Press.
Ghribi, I., Abdallah, R. B., Khalgui, M., and Platzner, M.
(2016a). New co-design methodology for real-time
embedded systems. In Proceedings of the 11th Inter-
national Joint Conference on Software Technologies
(ICSOFT 2016), pages 353–364, Lisbon, Portugal.
Ghribi, I., Abdallah, R. B., Khalgui, M., and Platzner, M.
(2016b). Rco-design: New visual environment for re-
configurable embedded systems. In Proceedings of
30th European Simulation and Modelling Conference
- ESM’2016, pages 217–224.
Horowitz, M., Indermaur, T., and Gonzalez, R. (1994).
Low-power digital design. In Proceedings of 1994
IEEE Symposium on Low Power Electronics, pages 8–
11.
Li, K. (2012). Scheduling precedence constrained
tasks with reduced processor energy on multiproces-
sor computers. IEEE Transactions on Computers,
61(12):1668–1681.
Li-yong, B., Dong-feng, Z., and Yi-fan, Z. (2010). A
priority-based polling scheduling algorithm in web
cluster servers. In Proceedings of 3rd International
Conference on Computer Science and Information
Technology, volume 8, pages 501–505.
Liyong, B., Dongfeng, Z., and Yifan, Z. (2010). A priority-
based polling scheduling algorithm in web cluster
servers. In 2010 3rd International Conference on
Computer Science and Information Technology, vol-
ume 8, pages 501–505.
Shin, D. and Kim, J. (2006). Dynamic voltage scaling
of mixed task sets in priority-driven systems. IEEE
Transactions on Computer-Aided Design of Integrated
Circuits and Systems, 25(3):438–453.
Strosnider, J. K., Lehoczky, J. P., and Sha, L. (1995). The
deferrable server algorithm for enhanced aperiodic re-
sponsiveness in hard real-time environments. IEEE
Transactions on Computers, 44(1):73–91.
Tchamgoue, G. M., Kim, K. H., and Jun, Y. K. (2012).
Dynamic voltage scaling for power-aware hierarchical
real-time scheduling framework. In 2012 IEEE 15th
International Conference on Computational Science
and Engineering, pages 540–547.
An Energy Aware Scheduling for Reconfigurable Heterogeneous Systems
177
