
Data Preprocessing of eSport Game Records
Counter-Strike: Global Offensive
David Bedn´arek, Martin Kruliˇs, Jakub Yaghob and Filip Zavoral
Charles University, Prague, Czech Republic
Keywords:
e-sport, Data Analysis, Data Integration, Data Quality, Player Rating.
Abstract:
Electronic sports or pro gaming have become very popular in this millenium and the increased value of this
new industry is attracting investors with various interests. One of these interest is game betting, which requires
player and team rating, game result predictions, and fraud detection techniques. In our work, we focus on
preprocessing data of Counter-Strike: Global Offensive game in order to employ subsequent data analysis
methods for quantifying player performance. The data preprocessing is difficult since the data format is
complex and undocumented, the data quality of available sources is low, and there is no direct way how to
match players from the recorded files with players listed on public boards such as HLTV website. We have
summarized our experience from the data preprocessing and provide a way how to establish a player matching
based on their metadata.
1 INTRODUCTION
Competition between people has been one of the
defining characteristics of the entire human race. In
the digital era, one of the domains where people ex-
press their competition is computer gaming. In fact,
game competitions have become much more than
common leisure activities and professional players
earn money for attending tournaments similarly to
professional athletes. A new industry was founded
around game competition which is commonly refered
to as electronic sports (eSports) or pro gaming.
Similarly to traditional sports, additional activi-
ties have joined eSports domain, such as fan clubs,
product advertisement (i.e., propagation of prod-
ucts/companies at game tournaments), or betting on
game results. These activities depend on additional
support from IT industry for data processing and anal-
ysis, especially providing publishing infrastructure
(broadcasting the eSport events), player rating, game
result prediction, and fraud detection.
In our work, we focus on analysing data from
played games in order to rate the performance of in-
dividual players and teams. These data can be subse-
quently used for player rating, team rating, preciting
game results, or even for fraud detection This paper
addresses various aspects of processing the data of
Counter-Strike: Global Offensive (CS:GO) recorded
games (especially the data parsing and preprocessing)
and to match these data with existing sources such as
HLTV
1
player boards.
This paper is organized as follows. Section 2 ex-
plains the rules and technical details of the CS:GO
game. Data parsing and preprocessing are summa-
rized in Section 3 and Section 4 describes our player-
matching technique which provides integration with
HLTV data source. Section 5 summarizes our find-
ings and concludes the paper.
2 COUNTER STRIKE: GLOBAL
OFFENSIVE
The Counter Strike: Global Offensive (CS:GO) is a
first-person shooter game where two teams of 5 play-
ers compete. The game has several scenarios, but the
only one used in eSport is called bomb defusal. One
team plays the terrorists who are attempting to plant
a bomb at one of two possible targets (planting sites).
The other team plays counter-terrorists who are try-
ing to prevent the terrorists from planting and deto-
nating the bomb.
The game is played on several
2
well known maps.
Based on the characteristics of individual tourna-
1
www.hltv.org
2
In most tournaments, the map pool is limited to 7 standard
maps.
Bednárek, D., Krulis, M., Yaghob, J. and Zavoral, F.
Data Preprocessing of eSport Game Records - Counter-Strike: Global Offensive.
DOI: 10.5220/0006475002690276
In Proceedings of the 6th International Conference on Data Science, Technology and Applications (DATA 2017), pages 269-276
ISBN: 978-989-758-255-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
269

ments, the teams select one or several maps (typically
3) by a deterministic negotiation protocol. The game
is played once for each map and a winner of each map
is recognized. The team that wins certain amount of
maps (e.g., 2 wins on 3 maps) wins the whole match.
In the remaining text, we will use the term ‘game’ in-
stead of ‘match’ since word ‘match’ may get some-
what ambiguous when describing player matching.
Each team may buy weapons and equipment for vir-
tual money before each round. The virtual money are
earned in the game for winning rounds and killing op-
ponents. Furthermore, players who survive the round
keep most of their equipment.
2.1 Demofiles and Data Sources
A game (one map) can be recorded into a DEM file
called demo file. It is basically a serialization of the
data transferred over the network between the server
and the players. The demofile can be recorded by the
server itself, but it can also be recorded by a spectator
(player present in the game which is invisible to other
players and cannot affect the game).
The demofile for the analysis must be provided by
the tournament organized, or a spectator access must
be granted to the game server. The demofile can be
also processed on the fly when the game is running
(i.e., read whilst it is being written) to provide real-
time game analysis. A very similar data stream is pro-
vided by GOTV – a broadcasting channel integratedin
the game, which may be enabled on the server and it
broadcasts game data to subscribed spectators. How-
ever, many tournaments delay this data (e.g., by 90
seconds), so the data cannot be feed back to the play-
ers via covert channels such as phone.
There is also a huge community interested in
CS:GO which manage data about players and games.
Perhaps the largest site dedicated to this game is
HLTV. It registers all important events and tour-
naments and gather results. The site also gathers
recorded demofiles and provide them for download.
Unfortunately, HLTV administrators have little inter-
est in sharing the data on a large scale; hence, there is
no API and all data has to be scraped from web pages.
Another issue with HLTV data is the player matching
– i.e., interlinking existing player profiles with players
in demofiles. Despite the fact that the site has identi-
fied the players internally, there is no direct linkage
between the demofiles and the web.
HLTV player matching is a special case of a more
general data matching problem. Although many com-
mercial, open-source, or research data-matching sys-
tems have been developed, such as BigMatch, D-
Dupe, R RecordLinkage, and many others (Christen,
2012), none of them is able to take into account the
particular needs of HLTV matching. The problem is
similar to nickname identification which is addressed
especially in the domain of social networks. Some of
the proposed methods use supervised learning meth-
ods (Peled et al., 2013), but they cannot be used in
HLTV matching due to absence of the relevantlabeled
training data of sufficient size.
Other class of methods use their own specific
models for matching individual accounts in particular
social networks. These methods compute a similar-
ity score from profile informations (Jamjuntra et al.,
2017) or combine various identity search methods ex-
ploiting distinct profile attributes to match accounts
across social networks (Jain et al., 2013). All of
these methods utilize additional information available
in user profiles to match the accounts. To our best
knowledge, none of the published methods could be
applicable to HLTV matching as additional informa-
tion are not available in demofiles. Therefore, we pro-
pose our own method which is described in Section 4.
3 GAME DATA PARSING
The game recordings are saved in demo files – a pro-
prietary format of Valve Corp which basically cap-
ture all network traffic (Breu, 2007) between the game
server and clients. A demo file is fixed to one map,
so if multiple maps are played in a game, multiple
demo files are required. On the other hand, it captures
a period of time in a game, so the game on one map
may be (and sometimes is) dividedinto multiple demo
files. Demo file uses three levels of encoding: net-
work packets, messages encoded using Google’s Pro-
tocol Buffers (Varda, 2008), and a proprietary Valve’s
data compression.
All encoding levels are bitwise-oriented. Parsing
one demo file must be done sequentially and only
maintaining the decoding state itself is rather com-
plicated. Furthermore, the third layer of encoding is
not very well documented (as it is proprietary) and
changes with new version of the game.
The CS:GO server (called Source) uses a tick time
unit as a logical time for the game simulation. All
client inputs, actions, and interactions with each other
and world objects are resolved periodically in these
ticks. Typical tick-rate for tournament servers is 128
ticks per second (one tick lasts approximately 7.8ms).
Probably due to size reasons, the demo file stores
information from 8 subsequent ticks together in a sin-
gle burst. This burst has two fixed parts – list of
events, and list of delta changes. Both parts are quite
important, so we describe them in more detail.
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
270

3.1 Events and Delta Changes
Events register important player actions and interac-
tions with the simulated world – for instance, when
player fires a weapon, bomb is planted, or the round
concludes. Events are structures that carry all event-
related data, such as location of the event, player who
caused the event etc. These structures are typically
simple to parse, thus events are logical choice for ba-
sic data analysis of the game. On the other hand, we
have discovered that events are not completely reli-
able and they differ significantly across the game ver-
sions. Some important events (e.g., player deaths) are
sometimes missing or contain invalid information.
The second part of each burst are the delta
changes. Each entity in the game is represented by
its own structure (e.g., a player has a structure which
contains coordinates on the map, pitch, health, etc.).
Delta changes basically forms an update transaction
of these structures – i.e., a list of game objects and
their properties which should be inserted, updated, or
removed from the game.
Delta changes are much more complex to process
as they do not carry a complete information, but only
a change from the previous state. Therefore, to pro-
cess the state of the game completely, we have de-
veloped a simplified game simulator which holds all
game objects and apply the delta change lists on them.
This way we can determine the complete state of the
game at any time.
3.2 Data Quality
There are several important issues we have observed
when processing demo files. Perhaps the most im-
portant issue is the fact that the demo files may be
corrupted. Unfortunately, the lack of documentation
prevent us to detect whether this is actually a problem
of file corruption on the data level, a matter of proto-
col errors or old protocol constructions, or simply an
insufficient knowledge of the format. In order to deal
with this problem, we have defined a trustworthiness
measure which is assigned to each parsed demo file.
It is basically a maximum of parsing error severity
levels from the file processing. Based on trustwor-
thiness, the files were divided into three categories:
files without errors, files which were parsed correctly
but contain unexpected data values (e.g., players with-
out identifiers), and files which cannot be parsed cor-
rectly. The first category can be fully processed while
the last one cannot be processed at all. The files
with unexpected values can be still partially processed
for some statistical purposes (e.g., when computing
global precision of weapon fire).
Even if the file can be parsed correctly, the fact
that the data are aggregated into bursts which repre-
sent 8 subsequent ticks may still cause minor process-
ing issue. For instance, if a player is spawned in tick
T
1
and immediately shoots in a tick T
2
whilst both
ticks T
1
and T
2
are in the same burst, it might hap-
pen that the information about weapon fire would pre-
ceded the information about player appearance. Se-
quential parser would fail in such case as it would en-
counter a weapon fire caused by nonexisting player.
Fortunately, this seeming violation of causality can
be easily rectified by deferring processing of events
and delta changes that involve nonexisting objects af-
ter the entire burst is processed.
The whole demo file contains all data from the pe-
riod of time when the recording was enabled (simi-
larly to a camera). Typically, such recording is initi-
ated well before the actual game is started. Therefore,
it also contains warmup rounds and sessions when
the players are connecting and waiting. These parts
are often very disruptive for data processing as they
contain similar events and delta changes as a regular
game, but they should not be used for data analysis
of the players’ performance. Furthermore, in these
time periods, the players typically connect and dis-
connect which makes it more difficult to determine,
which players are actually participating in the game.
Fortunately, a reset is typically performed just be-
fore the actual game begins. In some cases, the game
is reset multiple times in one demo file. It is impera-
tive to found the last reset just before the game starts
and then process only the data after this reset.
Finally, we have mentioned that the game events
are not reliable, especially when dealing with older
versions of demo files. On the other hand, delta
changes are more tedious for processing. In or-
der to maintain the simplicity of events but provide
better reliability, we have place detectors on certain
game object properties, and when these properties are
changed, we generate our own events. Our simulated
events mimic the structures of the parsed game events
to simplify their subsequent processing.
4 HLTV INTEGRATION AND
PLAYER MATCHING
Our research included an interesting case of data in-
tegration – our data originated from the following
sources:
The database of Steam users, maintained by the
Valve Corporation. Although there is a public API
for this database, many players have set their profiles
to private and, therefore, we did not use this data di-
Data Preprocessing of eSport Game Records - Counter-Strike: Global Offensive
271

rectly. Nevertheless, the database was manifested in
our data indirectly, since the game recordings con-
tained Steam user identifiers for all players and ob-
servers. Since the Steam system associates the user
identifiers with valuable assets like credit cards and
purchased software, it is reasonable to assume that the
mapping of Steam user identifiers to physical persons
is sufficiently reliable.
The game recordings (demo files), created by the
organizers of the tournaments. The demo files are
created by the game server or by an on-site specta-
tor client; although they are not protected by crypto-
graphic means, their alteration would require consid-
erable effort – thus, their contents may be considered
sufficiently reliable. However, there is no 1:1 cor-
respondence between demo files and games; there-
fore, some games may be covered incompletely and
some demo files may contain more recordings than
the game itself (e.g., a warmup phase).
The HLTV database, created by the community of
tournament organizers, players, and fans. Due to the
community origin, the reliability of data is variable,
depending on the author of particular record and the
amount of effort invested, leaving aside the possibility
of intentionally entered false data. Links to the demo
files are part of the HLTV database; therefore, the re-
lation between demo files and games is unreliable as
well, containing frequent omissions and a number of
mismatched entries.
In the dataset extracted from the HLTV website
in November 2016, there were 18 513 game entries;
however, usable game recordings were available for
only 8474 of them. There were 6566 HLTV player
entries, but only 4888 of them were attached to at
least one usable game entry. The 8474 recordings
contained 6563 different Steam user identifiers.
4.1 Steam Users and HLTV Player
Entries
The main problem in our case of data integration was
matching player entries in game recordings to player
entries in the HLTV database. For each game, there is
a set of Steam users present in the recording and a set
of HLTV player references entered by the community.
The rules of game do not recognize particular roles of
the players in the game, except for team allegiance.
Consequently, there is no reliable mechanism which
could pair the Steam users involved in a recording to
the player entries present in the HLTV database for
the same game.
In addition, while the recordings reliably identify
the users (identified by their Steam ids), their role in
the game, including the team allegiance is not eas-
ily recognized as users often make mistakes (or in-
tentional disturbances) during the heat phases and ob-
servers may be present too. Figure 3 shows the his-
togram of the number of Steam users found in individ-
ual recordings. Ideally, the number of players should
be 10; however, less than a third of all recordings sat-
isfy this condition – there are many recordings con-
taining more than 10 players, either due to observers
or mistakenly connected users. In addition, there are
also several recordings which have less than the re-
quired number of players.
On the HLTV side, there are no games with more
than 10 players due to technical restrictions; on the
other hand, a significant percentage of games have
less than 10 players entered, either due to incomplete-
ness of the game entry or due to presence of a player
without a HLTV entry.
4.2 Names and Nicks
When Steam users connect to the game server, they
may select a name which is displayed in the messages
and statistics produced by the game server. Users of-
ten choose fancy names to attract attention There are
some loosely followed conventions like including the
team name in brackets; however, most of the names
are created as a form of free art which may include a
play on characters, sounds, or meanings of the name.
On the other hand, there are names chosen in haste
or neglect like ’asdf’ or similar semi-random texts. In
many cases, the same user uses different names in dif-
ferent games.
In the HLTV database, the visible identifier of
a player is called a nick. Unlike in-game names,
most nicks consist only of plain alphabetical words,
i.e. no decorations are present. Nicks are rarely
changed (and there is no record of previous nicks in
the database).
Consequently, matching the Steam users to HLTV
nicks requires a string-matching algorithm capable to
compare the fancy in-game name to the plain nick;
the system must also cope with the fact that in-game
names change while the nicks are stable. It is also ap-
parent that the string matching could not be the sole
mechanism for player matching, since it is possible
that in-game name would bear no similarity to the
nick of the same physical person.
The name-nick matching requires a similarity
measure – among the possible candidates for such a
measure, the length of Longest Common Subsequence
(Hirschberg, 1975) was selected as a trade-off be-
tween quality and implementation complexity. The
LCS measure is based solely on matching characters
(unlike, for instance, the Levenstein distance), i.e.
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
272

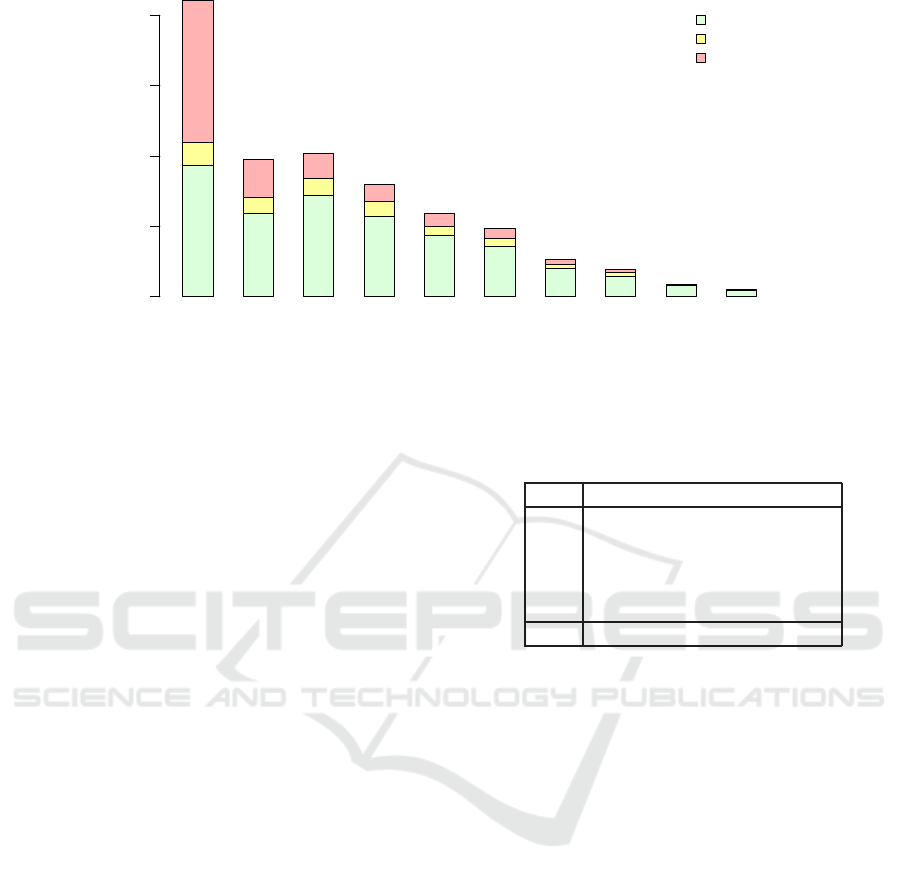
1 2 3−4 5−8 9−16 17−32 33−64 65−128 129−256 >256
games played
HLTV players
0
200
400
600
800
1000
1200
paired 1st
paired later
unpaired
Figure 1: HLTV players distributed by the number of games played.
it does not penalize the presence of additional non-
matching characters which frequently occur in fancy
in-game names.
4.3 Formal Model
The available input data may be formalized as a tri-
partite game-presence graph
G = (V
u
,V
h
,V
m
,E
um
,E
hm
)
where V
u
, V
h
, and V
m
are sets of vertices correspond-
ing to Steam users, HLTV player entries, and games,
respectively. E
um
⊆ V
u
× V
m
are edges representing
the presence of a Steam user in a game recording,
E
hm
⊆ V
h
×V
m
are edges representing the presence of
an HLTV player in a game.
Names and nicks are formalized as mappings n
u
:
E
um
→ S and n
h
: V
h
→ S where S denotes the do-
main of strings. The in-game names are associated to
edges because players may select a different name in
each game while the HLTV nicks are bound to ver-
tices representing the player entries. The LCS mea-
sure is denoted as s
LCS
: S × S → N .
The player matching process starts with determin-
ing candidate pairs:
C = {hu,hi ; (∃m ∈ V
m
)hu,mi ∈ E
um
∧ hh,mi ∈ E
hm
}
A pair of a Steam user and a HLTV player becomes
a candidate if and only if there is a game where both
participated. Each candidate pair receives a weight
corresponding to the number of such games:
w(u,h) = |{m ∈ V
m
; hu,mi ∈ E
um
∧ hh,mi ∈ E
hm
}|
Then, for each candidate pair, the LCS measure is
computed:
s(u,h) = max{s
LCS
(n
u
(u,m),n
h
(h)) ; hu, mi ∈ E
um
}
Since a Steam user u may use more than one name
n
u
(u,m), all the names are compared with a HLTV
player nick n
h
(h) and the maximum similarity is con-
sidered. Note that names which u have used in all its
games are considered, including those games where
the HLTV player h was not present – this arrangement
improves the pairing process for users (incorrectly)
represented by more than one HLTV entry.
4.4 Player-matching Algorithm
The player matching algorithm makes use of both the
game-presence graph (transformed into the weights
w(u,h)) and the name-nick similarity s(u,h). The
weights are given priority, i.e. the name-nick simi-
larity is used only to break ties in the weights.
Using the game-presence graph, subsets C
u
, C
h
,
and C
b
of the candidate-pair set C are named u-best
pairs, h-best pairs, and best pairs, respectively, and
defined by the following criteria:
hu,hi ∈ C
u
⇔ hu,hi ∈ C ∧
(∀hu,h
′
i ∈ C) (h
′
6= h ⇒ (w(u,h
′
) < w(u,h) ∨
w(u,h
′
) = w(u,h) ∧ s(u,h
′
) < s(u,h)))
hu,hi ∈ C
h
⇔ hu,hi ∈ C ∧
(∀hu
′
,hi ∈ C) (u
′
6= u ⇒ (w(u
′
,h) < w(u, h) ∨
w(u
′
,h) = w(u,h) ∧ s(u
′
,h) < s(u,h)))
C
b
= C
u
∩C
h
In other words, the candidate-pair set C is
ordered by the lexicographical ordering on their
hw(u,h), s(u, h)i values. Then, hu,hi is a u-best pair if
Data Preprocessing of eSport Game Records - Counter-Strike: Global Offensive
273
1 2 3−4 5−8 9−16 17−32 33−64 65−128 129−256 >256
games played
Steam users
0
500
1000
1500
2000
paired 1st
paired later
unpaired
Figure 2: Steam users distributed by the number of games played.
all other hu,h
′
i pairs are positioned lower in the lex-
icographical ordering. Similarly, it is a h-best pair if
all other hu
′
,hi pairs are positioned strictly lower.
Our problem is similar to maximum weighted bi-
partite matching (Kuhn, 1955); however, we are inter-
ested only in matchings which are strictly better than
any other. If there is a tie among several maximum
matchings, our problem requires that the uncertain
part of the matching be removed, i.e. not paired at all.
The Hungarian algorithm for maximum weighted bi-
partite matching cannot reliably detect the existence
of alternative matchings during its score-improving
phases; therefore, it is unusable in our settings.
Note that C
u
is a partial mapping from V
u
to V
h
and C
−1
h
is a partial mapping from V
h
to V
u
. If
C
−1
h
(C
u
(u)) = u then hu,C
u
(u)i is considered a best
pair. Note that the definition of C
u
and C
h
implies
that the values of hw(u,h),s(u, h)i must be strictly in-
creasing along any directed acyclic path formed by
C
u
and C
−1
h
edges; therefore no cycle longer than two
may exist and the best pairs are the only cycles in the
oriented graph formed by C
u
and C
−1
h
.
The C
b
relation does not necessarily cover all ver-
tices inV
u
or V
h
, leaving a residual pair set C
r
defined
as
hu,hi ∈ C
r
⇔
(∀h
′
) hu, h
′
i /∈ C
b
∧ (∀u
′
) hu
′
,hi /∈ C
b
The residual pair set is then used as a new
candidate-pair set input for the search for best pairs
and the process is repeated until no new best pairs are
found. This produces a sequence of candidate-pair
sets {C
(i)
} defined by
C
(1)
= C C
(i+1)
= C
(i)
r
Table 1: Name similarity (LCS) for 5 most-frequent play-
ers.
h165 h161 h5386 h2553 h317
u5441 3 1 3 2 6
u5439 3 3 2 3 6
u5897 2 2 5 2 5
u5446 2 2 3 4 5
u5898 2 3 3 2 11
3 3 5 4 11
and terminated when C
(i)
b
=
/
0.
The rationale behind the iteration is the informal
definition ”a pairing is best if all better candidates
were already paired”. Such a definition is recursive
with negation – the absence of rigorous semantics for
such a definition is solved by the stratification intro-
duced by the iterative algorithm.
The sequence of best-pair sets {C
(i)
b
} produces the
final pairing (by disjoint union)
P =
[
{C
(i)
b
}
together with the following confidence attributes as-
signed to each hu,hi ∈ C
(i)
b
:
a(u,h) = hw(u,h),s(u,h),ii
4.5 Example
As an illustration of the difficulty of name-nick
matching, Table 1 shows the similarity between the
names of five most active Steam users and the nicks
of five most active HLTV players. The columns of
the table correspond to HLTV player entries, ordered
in the decreasing order of games played. Their nicks
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
274
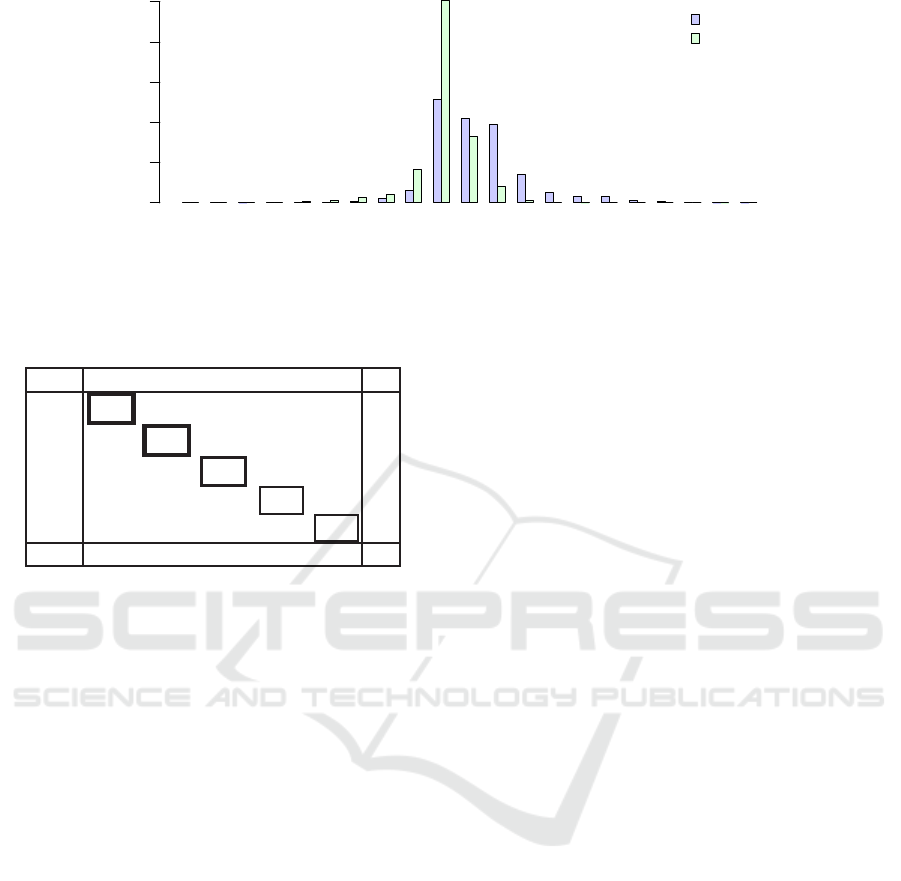
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
users in game
games
0
1000
2000
3000
4000
5000
users
paired users
Figure 3: Superimposed histograms of users in games.
Table 2: Presence in games for 5 most-frequent players.
h165 h161 h5386 h2553 h317
u5441 495 490 487 478 471 499
u5439 489 493 484 475 471 494
u5897 476 475 480 461 461 481
u5446 457 455 453 459 447 462
u5898 449 451 449 444 453 453
497 496 492 483 476
in the HLTV databases were 3, 3, 5, 4, and 11 char-
acters long, as shown in the bottom row of the ta-
ble. The rows correspond to Steam users which may
use a number of different names; therefore, the table
does not show their lengths. Each cell of the table
shows the similarity (longest common subsequence)
between the nick and the best matching among the
names of the corresponding user.
While the similarity between u5898 and h317 is
prominent, the rest of the table is inconclusive. For in-
stance, u5441 (using the name ”GO4BALKAN neo”)
has the same similarity 3 to h165 (nick ”NEO”) and
h5386 (”byali”) because of subsequences ”NEO” and
”BAL”, respectively. This could mean that LCS is not
the ideal similarity measure here; unfortunately, this
behavior is a natural consequence of the required abil-
ity to handle interleaving (like ”*N*E*O*”). In an-
other example of false similarity, u5441 alternatively
uses the name ”neoBiceps” which has similarity 6 to
h317 (”pashaBiceps”), because of the inclusion of the
name of clan or team.
The same five users and five players are shown in
Table 2 where the cells denote the number of games
where both the corresponding user and the corre-
sponding HLTV player participated. The rightmost
column shows the total number of games played by
each user; the bottom row presents the total number
of games played by each HLTV player.
The framed cells denote the pairing selected by
our player-matching algorithm – the two thickest
frames were paired in the first iteration of the algo-
rithm, the pair u5897-h5386 was selected in the sec-
ond iteration, and the two thinnest frames correspond
to the third iteration. The fact that the pairs appear on
the diagonal is a coincidence, but not completely ran-
dom, since both the rows and the columns are ordered
by the number of games played.
In the case of these five players, the pairing was
based purely on the game counts. The name-nick sim-
ilarity (i.e. the Table 1) is used only to break the tie
when equal number of games is encountered.
4.6 Evaluation
At the input of our player matching algorithm, there
were 6563 Steam users and 4888 HLTV player entries
which together participated in 8474 recorded games.
We worked with the idea that each HLTV player cor-
responds to one Steam user, i.e. we searched only for
1:1 matchings.
Our algorithm was able to find 4775 pairs – it
means that 97.69% of HLTV player entries were
matched to Steam users. Furthermore, the success ra-
tio improves to 99.70% when frequent players with
10 or more games are considered. The situation is de-
tailed in Figure 1 which shows the number of HLTV
player entries depending on the number of games
played. It also shows how many of them were paired
in the first and in the subsequent iterations of the al-
gorithm – the iterative character of the algorithm im-
proved the total success ratio from 83.27% in the first
iteration to the final 97.69%.
Figure 2 illustrates the situation from the other
side – the Steam users. Among the 6563 Steam users,
72.76% were paired. Furthermore, 86.82% of fre-
quent users (with 10 or more games) were paired.
This corresponds to the fact that the average number
of games played is 5.76 among unpaired users and
17.78 among paired users, which suggests that the un-
Data Preprocessing of eSport Game Records - Counter-Strike: Global Offensive
275

paired Steam users are less frequent players ignored
by the HLTV database.
Finally, Figure 3 shows two superimposed his-
tograms: The distributions of the total number of
Steam users per game and of the number of paired
Steam users per game. The first histogram shows that
less than a third of games contain the ideal number
of 10 users – majority of games include more than 10
users, probably as observers. The second histogram is
restricted to paired users and shows a clear peak at 10
paired users per game, contributing to the hypothesis
that most superfluous users are observers not regis-
tered in HLTV database. It also means that in 84.46%
of games we can identify at least 10 users, i.e. the
standard number of players.
5 CONCLUSIONS
In this paper, we have summarized our experience
from preprocessing gaming data for subsequent anal-
ysis. It has been establish that selected game has a
data format which is particularly difficult for process-
ing and the parsing itself gave rise to many issues.
The most important ones have been described and so-
lution has been proposed for them.
The game recordings themselves were down-
loaded from the most important community portal.
Unfortunately, this portal does not provide any re-
liable mapping between player ID from the demo
files (which are actually Steam IDs) and their com-
munity profiles. We have developed a player match-
ing algorithm which combines tripartite graph match-
ing with string similarity measure applied on player’s
nick names. This algorithm was able to pair most of
the players which is very important for establishing
ground truth in any player rating algorithm.
In our future work, we will use the preprocessed
data to perform data analysis and establish a player
rating and team rating algorithm. Such rating could
be used for predicting outcome of future matches (and
calculating better fixed-odds for betting) or to detect
possible frauds in eSport.
ACKNOWLEDGEMENTS
This work was supported by project PROGRES Q48.
REFERENCES
Breu, L. (2007). Online-games: Traffic analysis of popular
game servers (counter strike: Source).
Christen, P. (2012). Data matching: concepts and tech-
niques for record linkage, entity resolution, and dupli-
cate detection. Springer Science & Business Media.
Hirschberg, D. S. (1975). A linear space algorithm for com-
puting maximal common subsequences. Commun.
ACM, 18(6):341–343.
Jain, P., Kumaraguru, P., and Joshi, A. (2013). @i seek
’fb.me’: Identifying users across multiple online so-
cial networks. In Proceedings of the 22Nd Interna-
tional Conference on World Wide Web, WWW ’13
Companion, pages 1259–1268, New York, NY, USA.
ACM.
Jamjuntra, L., Chartsuwan, P., Wonglimsamut, P., Porkaew,
K., and Supasitthimethee, U. (2017). Social network
user identification. In 2017 9th International Con-
ference on Knowledge and Smart Technology (KST),
pages 132–137.
Kuhn, H. W. (1955). The hungarian method for the assign-
ment problem. Naval Research Logistics Quarterly,
2(1-2):83–97.
Peled, O., Fire, M., Rokach, L., and Elovici, Y. (2013). En-
tity matching in online social networks. In 2013 In-
ternational Conference on Social Computing, pages
339–344.
Varda, K. (2008). Protocol buffers: Googles data inter-
change format. Google Open Source Blog, Available
at least as early as Jul.
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
276
