
Adaptive Iterative Improvement GP-based Methodology for HW/SW
Co-synthesis of Embedded Systems
Adam Górski and Maciej Ogorzałek
Department of Information Technologies, Jagiellonian University in Cracow,
Prof. Stanisława Łojasiewicza 11, Cracow, Poland
Keywords: Embedded Systems, Architecture, Hardware/Software Co-synthesis, Genetic Programming, Genetic
Algorithm, Adaptive Systems.
Abstract: The paper presents a novel adaptive genetic programming based iterative improvement algorithm for
hardware/software co-synthesis of distributed embedded systems. The algorithm builds solutions by starting
from suboptimal architecture (the fastest) and using system-building options improves the system’s quality.
Most known genetic programming algorithms for co-synthesis of embedded systems are built choosing
fixed probability. In our approach we decided to change the probability during the work of the program.
1 INTRODUCTION
Embedded systems (Jiang, Eles and Peng, 2012) are
hardware systems able to execute some tasks by
embedded software. Distributed embedded systems
(Garcia, Botella, Ayuso, Prieto, and Tirado, 2013,
Konar, Bhattacharyya, Sharma, Sharma, Pradhan,
2017) are built using two kinds of resources:
processing elements (PEs) and communication links
(CLs). PEs are responsible for execution of the
tasks. Communication links provide the communica-
tion between PEs. There are two possible groups of
PEs: programmable processors (PPs) and hardware
cores (HCs). PPs are universal resources able to
execute more than one task. HCs are dedicated
resources that can execute only one task. In some
works (Grzesiak-Kopeć, Oramus and Ogorzałek,
2015) it is proposed to implement PEs in 3D layout.
According to De Micheli and Gupta (De Micheli
and Gupta 1997) design of embedded systems can
be divided into three phases: modelling,
implementation and validation.
Unexpected tasks can appear when the system
has been already designed and produced and no
changes in its architecture are possible. Thus another
part of embedded systems design process could be
assignment of unexpected tasks (Górski and
Ogorzałek, 2016).
One of very important problems in embedded
system design process is the problem of co-
synthesis. Co-synthesis (Densmore, Sangiovanni-
Vincentelli and Passerone, 2006, Jozwiak, Nedjah
and Figueroa, 2010) is a process of generation of an
architecture of embedded system based on the
specification provided. The process consists of:
allocation of resources – the choice of type and
number of resources, assignment – the choice of PE
for predicted tasks, task scheduling – needed if one
resource has to execute more than one task.
Existing co-synthesis methodologies can be
divided into two groups: constructive and iterative
improvement. Constructive algorithms (Dave,
Lakshminarayana, and Jha, 1997) make decisions
for every task separately. Therefore they can stop in
local minima when searching optimal parameters.
Iterative improvement methodologies (Yen and
Wolf, 1995) start from suboptimal architecture and
by local changes (like allocation or reallocation of
resources, moving task from one resource to another,
etc.) try to improve system quality. However
obtained results are still suboptimal.
In genetic algorithms (Dick and Jha, 1998, Guo,
Li, Zou and Yhuang, 2007) solutions are mostly
represented by a string or an array. Next, using
operators such as mutation, crossover and
reproduction, new solutions are created.
Very good results were obtained using genetic
programming (Deniziak and Górski 2008, Górski
and Ogorzałek 2014b). In such methodologies
(Koza, 2010) trees which represent design decisions
are evolved.
56
Górski, A. and Ogorzalek, M.
Adaptive Iterative Improvement GP-based Methodology for HW/SW Co-synthesis of Embedded Systems.
In Proceedings of the 7th International Joint Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2017), pages 56-59
ISBN: 978-989-758-266-0
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Adaptive solutions (Górski and Ogorzałek
2014a) are able to adapt to the environment by
making changes during their execution.
In the present paper we propose a novel adaptive
iterative improvement methodology based on
genetic programming. Unlike other genetic
programming based adaptive methodologies the
embryo, in every individual, is a suboptimal solution
– the fastest architecture. Therefore any other node
includes function which allows modification of the
architecture or task assignment.
2 PRELIMINARIES
The behaviour of distributed embedded system is
described by a task graph G = {T, E}. It is an acyclic
directed graph which shows the concurrency and
other dependencies of the tasks. The nodes of the
graph represent the tasks (T). The edges describe
amount of data d
i,j
that need to be transferred
between two connected tasks. Transmission time
(t
i,j
) is depended on CLs’ bandwidth (b). The time
can be calculated using the following formula:
b
d
t
ji
ji
,
,
=
(1)
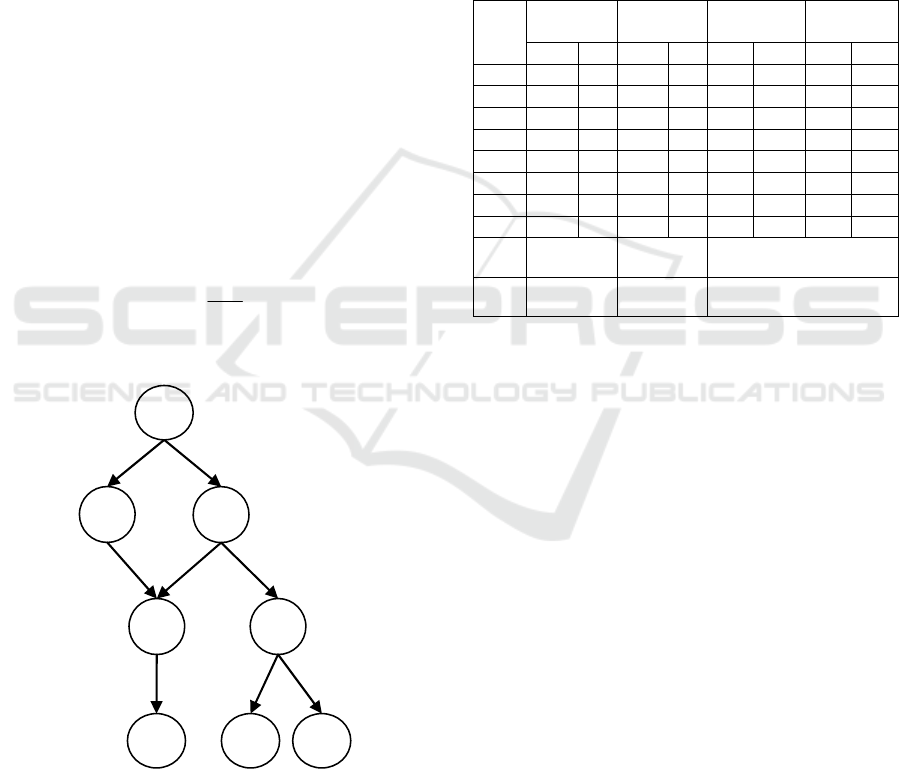
Figure 1 presents an example of task graph.
T2
T0
T1
T3 T4
14
120
6
10 8
T5 T6 T7
24
20
35
Figure 1: Example of task graph.
The graph consists of eight nodes: T0, T1, T2, T3,
T4, T5, T6 and T7. Tasks T1 and T2 can start their
execution after T0 is executed. T3 cannot start its
execution before T1 or T2 is finished. T4 can be
executed only after T2, T5 after T3, T6 and T7 after
T4. Tasks T1 and T2, T3 and T4, T5, T6 and T7 are
parallel. Table 1 includes example of resource
database for the system described by the graph of
figure 1. The target system can be built of four kinds
of PEs: two kinds of PP (PP1 and PP2) and two
kinds of HCs (HC1 and HC2). Cost (C) of used PP
must be added to overall cost of the system only
ones. Cost of HCs is added to the cost of tasks’
execution. Communication can be provided by two
kinds of CLs (CL1 and CL2). CLs also have cost (c)
of connection to each PE.
Table 1: Example of resource database.
Task
PP1
C=100
PP2
C=250
HC1 HC2
t c t c t c t c
T0 20 6 30 5 10 200 5 360
T1 40 8 35 10 12 150 8 190
T2 23 3 20 4 5 120 1 210
T3 14 10 18 9 2 300 5 220
T4 68 20 80 15 20 150 10 200
T5 34 5 30 7 9 110 8 130
T6 29 9 32 8 4 200 5 180
T7 36 10 28 15 6 190 8 160
CL1,
b=5
c=5 c=6 c=25
CL2,
b=10
c=6 c=7 c=30
The final system specified by the graph of figure
1 executes n processes consists of, m programmable
processors and p communication links (CLs). The
resources are chosen from the database given in
table 1. Overall cost (C
o
) of the system is described
by the formula below:
====
++=
p
z
P
y
PCCL
n
l
l
m
k
PEo
z
kzk
ccCC
11
,
11
(2)
The system cannot exceed the time constrains.
The co-synthesis algorithm needs to find an
architecture with the lowest C
o
value.
3 THE METHODOLOGY
At the beginning of the algorithm initial population
must be created. The population consists of
genotypes. Every genotype is a tree. The tree
includes system-building options in its nodes.
Number of individuals in the population is described
by the following formula:
e*n* =
α
Π
(3)
Adaptive Iterative Improvement GP-based Methodology for HW/SW Co-synthesis of Embedded Systems
57

where: n – number of tasks in task graph,
e – number of possible types of PEs, α – parameter
given by the designer.
The first node in every genotype is called an
embryo. The embryo is chosen as the fastest possible
architecture. In such an architecture every task is
executed by a different resource. The rest of the
genotype is created randomly. Therefore every
genotype can be a different tree containing different
number of nodes. Number of nodes in the tree is not
greater than number of tasks in the task graph. Table
2 presents options for system construction. Each
option has probability to be chosen.
Table 2: Options for building system.
Step Option
PE a. The cheapest implementation of
the most expensive task
b. The fastest implementation of
the slowest task
c. min (t*s) for most expensive
task
d. The last task from critical path
move on the same processor as
task’s predecessor
e. The first task from the most
expensive path move on the
cheapest implementation
f. The slowest task from critical
path move on the fastest
implementation
CL a. The fastest CL
b. The cheapest CL
c. the same as in the previous node
Task scheduling list scheduling
The options are executed according to the level
in the tree. Such options can allow more than one
modification of the assignment of any task in
investigating genotype. Nodes at the same level are
executed from left to right. After generating each
population solutions are rank by cost. Next the
algorithm counts the percentage/frequency of
appearance of each system-building option in the
first half of the population. The result is the new
value of probability for the options.
The first half of new population is generated the
same way as initial population using options
included in table 2 but with modified probability.
Second half of the next population is created
using genetic operators: reproduction, crossover and
mutation. Number of individuals obtained by every
genetic operator is presented below.
Φ = β*П/2 – number of individuals obtained by
reproduction;
Ψ = γ*П/2 – number of individuals obtained by
crossover;
Ω = δ*П/2 – number of individuals obtained by
mutation;
β + γ + δ = 1 – the condition responsible for
fixed number of individuals in every
population.
Parameters β, γ, δ control the evolution process.
Their values are given by the designer.
Mutation randomly chooses Ω genotypes and
replaced option from randomly selected node by
another option from table 2 but with probability
actual for current population.
Reproduction selects Φ individuals and copies
them to a new population. Each solution has
a probability to be selected during reproduction. The
probability depends on position r of the solution in
a rank list:
Π
−Π
=
r
P
(4)
Crossover generates Ψ solutions. The algorithm
randomly selects two individuals and randomly set
one different crossing point for each solution. Next
created subtrees are substituted between the
genotypes.
The stop condition is stimulated by parameter ε.
If the algorithm does not find better solution in
ε next steps, it will be stopped. Parameter ε is set by
the designer.
4 THE EXAMPLE
Figure 2 presents an example of genotype for the
task graph from figure 1. The example is consisted
of five nodes. The nodes contain system-building
options from table 2.
c/c
embryo
e/a
a/c
c/b
Figure 2: Example of genotype.
PEC 2017 - International Conference on Pervasive and Embedded Computing
58

In accordance with developmental genetic
programming rules the first node in the genotype is
an embryo. The embryo is the fastest
implementation of all the tasks. For the transmission
it was used CL2 which has the highest bandwidth
value. The cost of a system is 2020, the time of
execution of all tasks is 38,3. Next the second node
is executed. Therefore task T0 is moved to PP1. The
transmission for T0 is also provided by CL2. The
third node moves T3 to PP1. The fourth node
assigns T2 to PP1. The last node moves T6 to PP1.
The system is contained of one PP (PP1) which
executes four tasks, four HCs which execute four
tasks and one CL (CL2). The final cost of the system
is 963. The time of execution of all the tasks is 93,8.
5 CONCLUSIONS
In this paper a new adaptive genetic programming
approach to HW/SW co-synthesis was presented.
The approach builds genotypes by starting from
suboptimal solution and improves the system quality
by local changes. The methodology is able to adapt
to the environment. It is achieved by modifying the
probability of selecting each system-building options
during the work of the algorithm. The main
advantage of presented methodology, in comparison
with constructive algorithm, is reduced complexity.
Therefore the time of calculation can be much less.
In the future we plan to examine another
chromosomes and genetic operators.
REFERENCES
Jiang, K., Eles, P., Peng, Z., 2012. Co-design techniques
for distributed real-time embedded systems with
communication security constrains. Design
Automation and Test in Europe (DATE 2012).
Grzesiak-Kopeć, K., Oramus, P., Ogorzałek, M.J., 2015.
Using shape grammars and extremal optimization in
3D IC layout design. Microelectronic Engineering,
Vol. 148, pp. 80-84, Elsevier.
De Micheli, G., Gupta, R., 1997. Hardware/software
co-design. In Proceedings IEEE 95.3 (Mar). IEEE.
Górski, A., Ogorzałek, M.J., 2016. Assignment of
unexpected tasks in embedded system design process.
Microprocessors and Microsystems, Vol. 44,
pp. 17-21, Elsevier.
Garcia, C., Botella, G., Ayuso, F., Prieto, M., Tirado, F.,
2013. Multi-GPU based on multicriteria optimization
for motion estimation system EURASIP Journal on
Advances in Signal Processing, Vol. 23, Springer-
Verlag.
Konar, D., Bhattacharyya, S., Sharma, K., Sharma, S.,
Pradhan, S. R., 2017. An improved Hybrid Quantum-
Inspired Genetic Algorithm (HQIGA) for scheduling
of real-time task in multiprocessor system. Applied
Soft Computing, Vol. 53, pp. 296-307, Elsevier.
Densmore., D., Sangiovanni-Vincentelli, A., Passerone, R.
(2006). A platform-based taxonomy for ESL design.
IEEE Design & Test of Computers Vol. 23, No 5,
pp. 359-374.
Jozwiak L., Nedjah N., Figueroa, M., 2010. Modern
development methods and tools for embedded
reconfigurable systems – a survey. Integration, VLSI
Journal, pp.1-33.
Dave, B., Lakshminarayana, G., Jha, N., 1997. COSYN:
Hardware/software Co-synthesis of Embedded
Systems. In Proceedings of the34th annual Design
Automation Conference (DAC’97).
Yen, T., Wolf, W., 1995. Sensivity-Driven Co-Synthesis
of Distributed Embedded Systems. In Proceedings of
the International Symposium on System Synthesis.
Dick, R., P., Jha, N., K., 1998. MOGAC: a multiobjective
Genetic algorithm for the Co-Synthesis of
Hardware-Software Embedded Systems. In IEEE
Trans. on Computer Aided Design of Integrated
Circiuts and systems, vol. 17, No. 10.
Guo R., Li, B., Zou, Y., Yhuang, Z., 2007. Hybrid
quantum probabilistic coding genetic algorithm for
large scale hardware-software co-synthesis of
embedded systems. In Proc. of the IEEE Congres on
Evolutionary Computation, pp. 3454-3458.
Deniziak, S., Górski, A., 2008. Hardware/Software Co-
Synthesis of Distributed Embedded Systems Using
Genetic programming. In Proceedings of the 8th
International Conference Evolvable Systems: From
Biology to Hardware, ICES 2008. Lecture Notes in
Computer Science, Vol. 5216. SPRINGER-VERLAG.
Górski, A., Ogorzałek, M.J., 2014a. Adaptive GP-based
algorithm for hardware/software co-design of
distributed embedded systems. In Proceedings of the
4th International Conference on Pervasive and
Embedded Computing and Communication Systems,
Lisbon, Portugal.
Górski, A., Ogorza
łek, M.J., 2014b. Iterative improvement
methodology for hardware/software co-synthesis of
embedded systems using genetic programming. In
Proceedings of the 11th Conference on Embedded
Software and Systems (Work in Progress Session),
Paris, France.
John R. Koza. 2010. Human-competitive results produced
by genetic programming. In Genetic programming and
evolvable machines, vol. 11, issue 3-4. Springer-
Verlag.
Adaptive Iterative Improvement GP-based Methodology for HW/SW Co-synthesis of Embedded Systems
59
