
Home Furniture Detection by Geometric Characterization by
Autonomous Service Robots
Oscar Alonso-Ramirez
1
, Antonio Marin-Hernandez
1
, Homero V. Rios-Figueroa
1
and Michel Devy
2
1
Artificial Intelligence Research Center, Universidad Veracruzana, Sebasti
´
an Camacho No. 5, Xalapa, Ver., 91000, Mexico
2
CNRS, LAAS, Universit
´
e de Toulouse, 7 avenue du Colonel Roche, F-31077 Toulouse Cedex, France
Keywords:
Service Robots, Furniture Detection.
Abstract:
Service robots are nowadays more and more common on diverse environments. In order to provide useful
services, robots must not only identify different objects but also understand their use and be able to extract
characteristics that make useful an object. In this work, a framework is presented for recognize home furniture
by analyzing geometrical features over point clouds. A fast and efficient method for horizontal and vertical
planes detection is presented, based on the histograms of 3D points acquired from a Kinect like sensor onboard
the robot. Horizontal planes are recovered according to height distribution on 2D histograms, while vertical
planes with a similar approach over a projection on the floor (3D histograms). Characteristics of points belong-
ing to a given plane are extracted in order to match with planes from furniture pieces in a database. Proposed
approach has been proved and validated in home like environments with a mobile robotic platform.
1 INTRODUCTION
When someone thinks of a fully functional service
robot, it is very common to imagine a robot perform-
ing different tasks the same way humans do. Al-
though many advances has been achieved from di-
verse groups around the world, e.g. in the fields of
mobile robot localization, path planning and human-
robot interaction; cognitive representation of environ-
ments is still a challenge. For a robot to understand
that a chair has a surface to sit down, surface that it is
closely linked with the property of being a chair, but
that in some cases could be used to place objects, it is
an abstraction very difficult to do for a robot.
Many works for detecting objects do not consider
characteristics of high level that allow to understand
the use or the properties of an object. Dealing with
such a problem, in this paper it is proposed to ana-
lyze furniture pieces by extracting some of the prin-
cipal characteristics of them, we focus particularly on
pieces of furniture that can be moved or relocated by
humans or the same robot while doing his tasks, e.g.
cleaning beside or under a couch or bed. Furniture
fixed to the environment as wardrobes or cabinets that
do not move, are out of the scope of this work.
Along this work it is proposed to model and iden-
tify objects by its geometrical properties, i.e. horizon-
tal or vertical planes, supports (legs), etc. By model-
ing individually each part of the furniture the robot
could infer in the future, that a flat surface like the
main plane of a table has the same characteristics as
the horizontal plane of the chest of drawers and then
suppose that is possible to pose objects on it.
This paper is organized as follow, on next sec-
tion (2) some of the most important related works are
described. Section 3 refers to planes characteristics
extractions for furniture model representation and on
section 4 those characteristics are used to identify ob-
jects in a data base. On section 5 are shown some ex-
periments and finally on section 6 are given the con-
clusions and future work.
2 RELATED WORK
In the recent years, a lot of works for detection and
recognition of objects have been developed, com-
monly working with 3D information, which gives
to the robots more information but also increase the
processing required. In order to keep this process-
ing from becoming untreatable, new techniques have
been created.
There are different ways to represent the 3D data
of the objects, choosing the better representation will
depend on the application. In (Nießner et al., 2013), a
508
Alonso-Ramirez, O., Marin-Hernandez, A., Rios-Figueroa, H. and Devy, M.
Home Furniture Detection by Geometric Characterization by Autonomous Service Robots.
DOI: 10.5220/0006478405080513
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 508-513
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
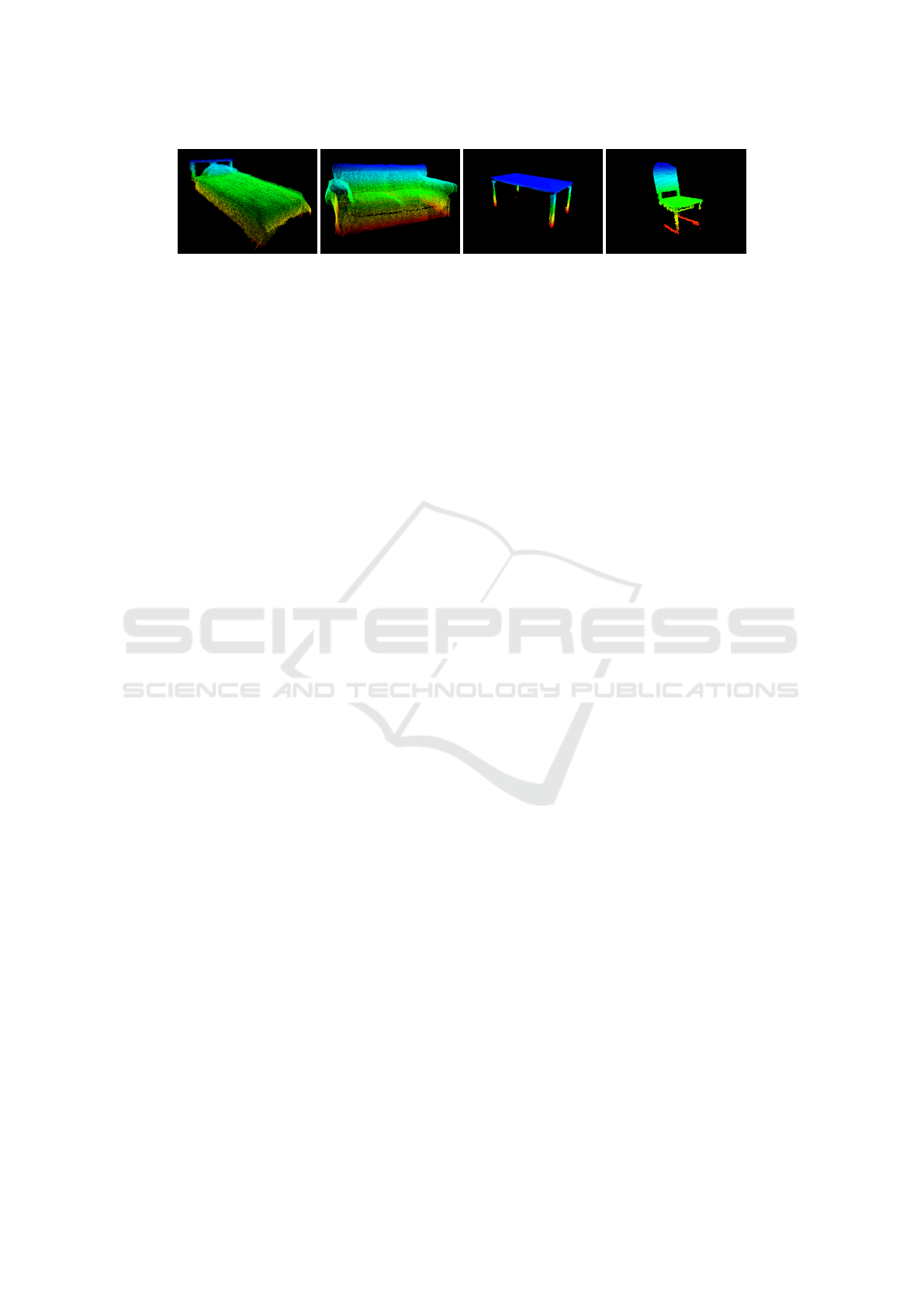
(a) (b) (c) (d)
Figure 1: Examples of point cloud models: (a) bed, (b) couch, (c) table and (d) a chair.
simple spatial hashing scheme is presented for large
and fine scale reconstruction. This helps for more
efficient object reconstruction and real time updates.
In (Wu et al., 2015) is proposed to represent the 3D
shape of objects as a probability distribution of bi-
nary variables on a voxel grid using a Convolutional
Deep belief Network. They are able to recognize and
reconstruct objects based on their own dataset.
In (Wahl et al., 2003) is introduced a four-
dimensional feature invariant to translation and rota-
tion that captures the intrinsic geometrical relations
between pairs of oriented surface points. In (Drost
et al., 2010) is proposed an off-line global model de-
scription based on oriented point pair features. For
the recognition phase they match the object and obtain
its pose based on a voting scheme. This method, re-
ported in (Salas-Moreno et al., 2013) for an object ori-
ented SLAM technique, has shown good results when
the objects occupy most of the field of view, but fails
when the objects are distant or partially occluded.
Most of these techniques are able to capture small
details on the objects and in general they work better
for small objects, when the pieces of furniture of a
home are analyzed, it is necessary to focus on bigger
features like planes.
As stated in (Swadzba and Wachsmuth, 2014), it
is reasonable to represent a 3D scene as a collection
of planes since a typical indoor environment mostly
consist of planar surfaces. In (Trevor et al., 2012)
they also highlighting the importance of the planar
surfaces as landmarks.
In (G
¨
unther et al., 2013) the furniture is repre-
sented as a set of planar structures that “have a cer-
tain size, orientation, height above ground and spatial
relation to each other”. A faster alternative to plane
segmentation was presented in (Holz et al., 2012), us-
ing integral images and taking advantage of the struc-
tured point cloud from RGB-D cameras. In (Alonso-
Ramirez et al., 2015) was presented an approach to a
fast horizontal planes detection also based on struc-
tured point clouds.
In (G
¨
unther et al., 2017) is presented a classifica-
tion technique based on semantic models from furni-
ture objects based on their planar surface.
Taking advantage of statistical properties of the
3D world and the contextual relationships between
the objects in the world, (Lin et al., 2013) present a
technique for object detection and scene understand-
ing. Based on (Carreira and Sminchisescu, 2012) to
find object regions and later classify them. By us-
ing a conditional random field (CRF) model they inte-
grate appearance, geometry, object relations with the
environment and with other objects and they avoid
some of the problems with feature-based approaches
like pose variation, object occlusion or illumination
changes.
These works highlight how plane detection com-
bined with semantic information can provide a good
representation of the environments for the robots. The
proposed approach characterize the planes of the fur-
niture and extract some characteristic information to
classify them, information that could be used in the
future for semantics.
3 OBTAINING AND
CHARACTERIZING THE PCD
MODELS FOR THE
FURNITURE
To be able to identify the furniture, the robot requires
to previously model each one of the pieces of furni-
ture in the environment. At this stage of the research,
a specific model for each piece of furniture has been
created and not a general model, however this could
be incorporated later.
To obtain the models, there are two ways; to get
the model from the internet or to construct the model
ourselves. Our approach requires for the model to be
a point cloud. It is possible to extract one from the
online models (depending on its format) but is very
likely some extracted points correspond from surfaces
not visible for the robot, for example the lower side of
a tables plane. In order to have a model similar to the
point clouds the robot will see, we decided to con-
struct the models ourselves from several point clouds
from different views of the furniture.
Home Furniture Detection by Geometric Characterization by Autonomous Service Robots
509

(a) (b)
Figure 2: In (a) an indoor scene and in (b) its height his-
togram.
3.1 Creating a PCD Model
We took several images around each piece of furni-
ture. Since the robot was localized in the environ-
ment, all those images were in the same reference
frame. Small errors in alignment are corrected with an
ICP algorithm. Then, the different views were merged
and down-sampled to obtain the point cloud model of
the furniture. The figure 1 shows some examples of
the PCD models obtained, the point cloud color rep-
resents the z value of each point.
In order to characterize the obtained models, it is
necessary to extract the planes from the PCD. Most
of the methods for plane extraction use computa-
tionally expensive variations of RANSAC-like algo-
rithms. However, a quick analysis of the distribution
of the points can be enough.
Using an RGB-D camera mounted on a PTU in the
robot, point clouds can be extracted and they can be
transformed from the camera reference frame to the
robot’s base frame or to the world reference frame.
Under these circumstances, detecting horizontal and
vertical planes on the point clouds can be simplified
by analyzing the concentration of the points, avoiding
a complex mathematical approach.
3.2 Characterizing the horizontal
planes
To extract the horizontal planes, the approach pre-
sented in (Alonso-Ramirez et al., 2015) was followed.
The first step is to construct a height histogram.
Since the point cloud is transformed to the robot’s
base coordinate frame, a horizontal plane will con-
centrate a considerable amount of points at the same
hight. In order to extract the planes from the his-
togram we need to search for the higher peaks.
The figure 2 shows an example of a height his-
togram, the figure 2(a) shows the RGB data of the
point cloud that is being analyzed and the figure 2(b)
shows the height histogram. It can be observed how
there are two outstanding peaks on the histogram,
which correspond to the height of the table and the
(a) (b)
Figure 3: Examples of height histograms for (a) a chest of
drawers and (b) a couch.
height of the seats of the chairs.
To find the outstanding peaks, first the curve of
the histogram is reduced with the DouglasPeucker al-
gorithm (a curve simplification algorithm) to reduce
the noise in the signal by eliminating small variations
without increasing the bin size. Then a search is per-
formed to find the larger peaks in the curve. All the
points within those peaks are retrieved and projected
to a floor plane. Then, a clustering algorithm is per-
formed on the projection in order to separate different
planes that can exist at the same high for example the
seats of different chairs.
The Figure 3, shows the characteristic curves for
some models of pieces of furniture. However this in-
formation is not enough for the robot to classify them
since the histograms can change significantly during
the execution due to noise and partial views. In or-
der to characterize each plane detected the following
characteristics are extracted.
center The 3D point center of the plane points
orientation Defining an horizontal or vertical plane
height The average height of the points.
height deviation The standard deviation of the
point’s height.
area Area of the plane projected
PCA eigenvectors and eigenvalues Eigenvectors
and eigenvalues resulting of a principal compo-
nent analysis (PCA) to the plane points
This information allow to perform a better analy-
sis of the planes, which leads to a better classification.
The horizontal planes of the furniture have different
height, area, and some adjust better to a mathematical
plane than others, for example the points from a table
have a smaller height deviation than the points on the
horizontal plane of a bed.
However, more information needs to be extracted
from the point clouds apart from the horizontal
planes, to complete the furniture models. In a differ-
ent way as the presented on (Alonso-Ramirez et al.,
2015), along this work the color or normal histograms
are not used.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
510
(a) (b)
Figure 4: In (a) indoor scene and (b) its vertical projection.
3.3 Characterizing the Vertical Planes
For detecting the vertical planes, the same approach
for the horizontal planes can be extended. A two di-
mensions histogram will be constructed, projecting
all 3D points to a floor plane and then counting the
number of points that lie at the same coordinates on
the projection. All the points on a vertical plane pro-
jected to the floor plane will produce a line on the
projection. Therefore retrieving all the points in those
lines will extract the vertical planes.
In order to make the lines in the projection more
remarkable, a smoothing filter has been applied and
then morphological operators of dilation and erosion.
Figure 4 shows an example of a vertical projection
from a particular scene where it can be seen the walls
project the bigger lines, smaller lines for the side, the
front and the back of the couches and small dots for
the table legs.
Since the lines in the projection are not always
straight and their width can be variable, the Hough
algorithm did not provide good results. To extract the
lines a clustering algorithm is performed, the clusters
obtained are approximated to polygons for reducing
its number of points. A convex hull is calculated to
determinate, based on its size, if the cluster is one sin-
gle line or it has two o more lines together, for ex-
ample two walls joining in a corner or a piece of fur-
niture placed against the wall. If that is the case, the
lines are separated on the joints. The points belonging
to the planes are retrieved the same way as they were
retrieved in the horizontal planes.
The vertical planes or regions detected will be
considered as secondary characteristics to the hori-
zontal regions. They will bring new information and
together with the horizontal planes will complete the
model of the furniture. The same characteristics cal-
culated for the horizontal planes are calculated for the
verticals. In this case, based on the PCA eigenvectors
and eigenvalues it can be make a subdivision to the
vertical planes and identify the legs of some furniture
like tables and chairs.
Seat
Vertical
Backrest
Leg
Leg
Leg
Leg
Horizontal
Leg
(a)
table
leg
leg
leg
leg
Horizontal
Leg
(b)
Figure 5: Graph for (a) a chair and (b) a table.
armrest armrest
seat
backrest
top
front
side
rear
Vertical
Horizontal
side
backrest
front
rear
side
rear
side
(a)
Vertical
Horizontal
armrest armrest
seat
backrest
top
front
side
(b)
Vertical
Horizontal
armrest armrest
seat
backrest
top
front
side
(c)
Figure 6: In (a) a complete couch graph and in (b) the left
and in (c) the right visual sub-graphs.
3.4 Furniture Characterization
Once the models were created and their planes were
separated and characterized, a graph is constructed.
Each plane will be a node and the arcs will represent
adjacency between two planes. The principal node
will be the horizontal plane of the furniture or the
biggest horizontal plane in cases where there are more
than one. In Figure 5 are shown some examples of the
graphs of the furniture’s model. The node’s shape rep-
resent it’s type, the ellipses nodes correspond to hori-
zontal planes, the rectangles to vertical planes and the
pentagons are the furniture supports (legs).
These graphs contain all the planes of each piece
of furniture. However, when we analyze an image
from a scene the robot is unable to see all the planes
since they can be on opposite sides. In the figure
6(a) is shown the graph for the couch. In the lower
right corner of each node there is a list of the opposite
planes, for example, if the robot sees the rear plane,
depending on the angle maybe he can see the seat, but
he can not see the backrest or the front plane.
Based on these viewing restrictions sub-graphs are
created, each one showing the visible planes from the
piece of furniture from different point of views. In
the figures 6(b) and 6(c) there are sub-graphs from
the couch viewed from the front left side and from the
front right side respectively.
Home Furniture Detection by Geometric Characterization by Autonomous Service Robots
511

4 SCENE ANALYSIS
Once a furniture’s models database has been con-
structed and the robot is wandering in the environ-
ment, it is required to identify the furniture present in
the scene. Once the robot takes a point cloud to an-
alyze, the first step is to eliminate the floor by filter-
ing all the points corresponding to a height smaller to
10cm. And then, as described in the previous section,
the horizontal and vertical planes are extracted.
The characteristics of the horizontal planes are
compared with the main horizontal planes of the mod-
els. The probability of a plane to belong to each type
of furniture is based on the equation (1).
p
plane
(x|h,σ,a) =
1
2
ph +
1
4
pσ +
1
4
pa (1)
where h, σ and a represent the heigh, the height de-
viation and the area of the plane. The probability is
the weighted sum of the similarity of the attributes to
the model’s as described in the equations (2), (3) and
(4). To classify the plane, all the categories with the
probability higher than certain threshold are chosen.
ph = 1 − |h
m
− h
x
|/h
range
(2)
pσ = 1 − |σ
m
− σ
x
|/σ
m
(3)
pa = 1 − |a
m
− a
x
|/a
m
(4)
Once the horizontal plane has been classified as
belonging to a furniture, a search is performed and the
planes which are close to it are combined on a graph.
This graph from the scene will be compared with the
sub-graphs of the probable models.
First, it is necessary to match the nodes from the
scene graph to the model’s graph. The node for the
main horizontal plane is automatically matched, a
search of configurations is performed to match the
rest of the nodes based on its characteristics and its
position with respect to the main plane.
Once all the nodes from the scene graph are
matched to the nodes of the model graph, their simi-
larity is calculated in a similar way as the probability
for the horizontal planes. Then, a weighted sum of the
similarities of all the nodes, is performed. The weight
for each pair of nodes will be the percentage of node
from the total area of the model sub-graph.
p
ob ject
=
N
∑
i
w
i
p
plane
(x) (5)
5 RESULTS IN FURNITURE
CLASSIFICATION
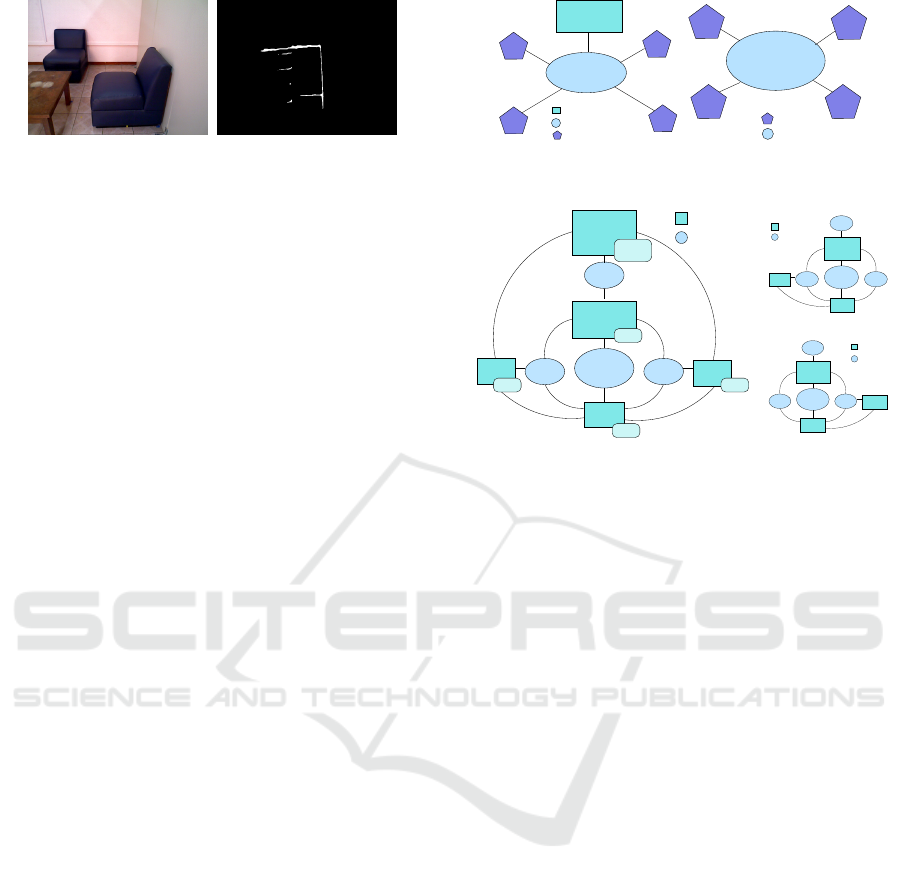
The figure 7 shows some of the results obtained. The
images on the left side are the RGB of the point cloud
analyzed, the images in the center show the planes ob-
tained and the images on the right show the resulting
graphs and their classification.
The figure 7(a) shows a scene where two pieces
of furniture can be found. It can be observed that
two horizontal planes were detected. For the plane
labelled as “H00” (which correspond to a coffee ta-
ble) there were two plane probabilities higher than the
threshold of 0.6, the higher probability for the coffee
table and a smaller one for the couch. The results can
be observed on the table 1. In this case, no adjacent
planes were found, so the constructed graph will con-
sist only on the main node. Once it is compared to the
graphs for the coffee table and the couch, it is con-
firmed a higher probability for the former and then it
is labelled.
Table 1: Example for graph classification.
Main Node Node
Prob
Adjacent
Nodes
Node
Prob
Graph
Probability
H00
Coffee Ta-
ble
none – 0.5517
0.8238
H00
Couch none – 0.1344
0.6903
H01
Couch V01 backrest 0.6241
0.9375 0.7703
V02 front
0.7960
H01
Bed V01 no match 0.5895
0.7651 –
V02 front
0.6496
For the second plane “H01”, corresponding to a
couch, there were also two plane probabilities higher
than the threshold, and there were two adjacent planes
found. The results can be observed in table 1 were the
higher object probability correspond to the couch. In
figure 7(b) and 7(c) other results for different types of
furniture can be found.
6 CONCLUSION
Along this work, an approach for home furniture de-
tection, has been presented. The proposed approach
is based on the characterization of geometric entities
of the diverse pieces of furniture. As described, the
main characteristic for these furniture pieces is its hor-
izontal planes but also vertical planes and legs are ex-
tracted. A neighbourhood graph is then constructed in
order to identify the correct piece of furniture present
in the scene. The approach has been validated and
proven their effectiveness on a home like environment
with a robot moving in it. In future work, the charac-
terization are going to be used to let the robot to infer
about similar properties of geometric entities, e.g. the
horizontal planes.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
512

Coffe Table
H00
Wall
V03
V00
H01
V01
V02
Couch
Horizontal
Vertical
Leg
(a)
V02
Vertical
Horizontal
V00
H00
V01
V03
Drawer
(b)
Table
Chair
V03
V00
V01
V02
H01
H00
Leg
Horizontal
Vertical
Wall Wall
(c)
Figure 7: Results for the furniture detection.
REFERENCES
Alonso-Ramirez, O., Aguas-Garcia, Y., Marin-Hernandez,
A., Rios-Figueroa, H. V., and Devy, M. (2015). An
efficient alternative approach for home furniture de-
tection and localization by an autonomous mobile
robot. In 2015 IEEE International Autumn Meeting on
Power, Electronics and Computing (ROPEC), pages
1–6.
Carreira, J. and Sminchisescu, C. (2012). Cpmc: Auto-
matic object segmentation using constrained paramet-
ric min-cuts. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 34(7):1312–1328.
Drost, B., Ulrich, M., Navab, N., and Ilic, S. (2010). Model
globally, match locally: Efficient and robust 3d object
recognition. In IEEE CVPR’10, pages 998–1005.
G
¨
unther, M., Wiemann, T., Albrecht, S., and Hertzberg, J.
(2013). Building semantic object maps from sparse
and noisy 3d data. In 2013 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
2228–2233.
G
¨
unther, M., Wiemann, T., Albrecht, S., and Hertzberg, J.
(2017). Model-based furniture recognition for build-
ing semantic object maps. Artificial Intelligence,
247:336 – 351. Special Issue on {AI} and Robotics.
Holz, D., Holzer, S., Rusu, R. B., and Behnke, S. (2012).
Real-Time Plane Segmentation Using RGB-D Cam-
eras, pages 306–317. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Lin, D., Fidler, S., and Urtasun, R. (2013). Holistic scene
understanding for 3d object detection with rgbd cam-
eras. In IEEE ICCV’13, pages 1417–1424.
Nießner, M., Zollh
¨
ofer, M., Izadi, S., and Stamminger,
M. (2013). Real-time 3d reconstruction at scale us-
ing voxel hashing. ACM Trans. Graph., 32(6):169:1–
169:11.
Salas-Moreno, R. F., Newcombe, R. A., Strasdat, H., Kelly,
P. H. J., and Davison, A. J. (2013). Slam++: Simulta-
neous localisation and mapping at the level of objects.
In IEEE CVPR’13, pages 1352–1359.
Swadzba, A. and Wachsmuth, S. (2014). A detailed anal-
ysis of a new 3d spatial feature vector for indoor
scene classification. Robotics and Autonomous Sys-
tems, 62(5):646 – 662. Special Issue Semantic Per-
ception, Mapping and Exploration.
Trevor, A. J. B., Rogers, J. G., and Christensen, H. I. (2012).
Planar surface slam with 3d and 2d sensors. In IEEE
ICRA’12, pages 3041–3048.
Wahl, E., Hillenbrand, U., and Hirzinger, G. (2003). Surflet-
pair-relation histograms: a statistical 3d-shape repre-
sentation for rapid classification. In Fourth Interna-
tional Conference on 3-D Digital Imaging and Mod-
eling, 2003. Proceedings., pages 474–481.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep representa-
tion for volumetric shapes. In IEEE CVPR’15, pages
1912–1920.
Home Furniture Detection by Geometric Characterization by Autonomous Service Robots
513
