
Towards a Complex Interaction Scenario in Worker-cobot
Reconfigurable Collaborative Manufacturing via Reactive Agent
Ontology
Case-study: Two Workers in Cooperation with One Cobot
Ahmed R. Sadik
1,2
and Bodo Urban
1,2
1
University of Rostock, Universitätsplatz 1, 18055, Rostock, Germany
2
Fraunhofer Institute for Computer Graphic Research IGD, Joachim-Jungius-Str. 11, 18059, Rostock, Germany
Keywords: Ontology-based Communication, Collaborative Robotics, Reconfigurable Manufacturing System, Holonic
Control Architecture, Autonomous Reactive Agent, Multi-Agent System.
Abstract: Close Human-Robot Interaction (HRI) has been a great focus of research for the last decades. The outcomes
of this focus is a new field in industrial robotics called collaborative robotics. A collaborative robot (cobot) is
usually an industrial robot designed to operate safely in a shared work environment with the human worker.
This in contrast to conventional Industrial Robots (IRs) which are operating in isolation from the worker
workspace, the cobot is changing the concept of automation from fully automated operations to semi-
autonomous operations, where the decisions of the worker will influence the actions of the cobot and vice-
versa. Therefore, a communication and information control framework must exist to connect the worker and
the cobot together to fulfil this semi-autonomous paradigm. This framework should be able to provide a
method to represent the common knowledge which can support the collaborative manufacturing between the
worker and the cobot. During this research we are proposing an ontology-based Holonic Control Architecture
(HCA) as a proper solution to share and communicate the knowledge needed to achieve complex interaction
scenarios between the worker and the cobot.
1 INTRODUCTION
There is no doubt that the collaborative robotics is an
innovative solution for the Reconfigurable
Manufacturing System (RMS). An RMS is by
definition a system where production components
and functions can be modified, rearranged and/or
interchanged in a timely and cost-effective manner to
quickly respond to production requirements (Koren et
al., 1999). Three important factors are usually
defining the reconfigurability of an RMS, these
factors are the production line structure, the product
building plans, and the shop floor resources functions.
Adding the close physical interaction between the
worker and the cobot, is definitely a new important
factor in the RMS which we should put more focus of
study on it. The RMS concept stands between the
Dedicated Manufacturing System (DMS) and the
Flexible Manufacturing System (FMS) as shown in
Figure 1. Mass production method is applied in the
DMS where a high rate of production can be
achieved.
Figure 1: Comparison between DMS, RMS and FMS.
Mass production is using a static pre-planned
schedule to manage the production operations,
therefore the customization level is very low or
impossible. Mass production method is cost efficient
only in case of high market demand, which is not a
feature of nowadays market (Elmaraghy, 2005). The
Sadik A. and Urban B.
Towards a Complex Interaction Scenario in Worker-cobot Reconfigurable Collaborative Manufacturing via Reactive Agent Ontology - Case-study: Two Workers in Cooperation with One
Cobot.
DOI: 10.5220/0006487200270038
In Proceedings of the 9th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (KEOD 2017), pages 27-38
ISBN: 978-989-758-272-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
FMS applies the product customization concept
where very highly customized products can be
manufactured in small quantities. The cost of the
FMS is relatively high due to using expensive
machines and sophisticated software. Therefore the
production rate and capacity of an FMS is very low
compared with a DMS, which makes the FMS fails in
the most of the cases to efficiently respond to the
market demands (Kruger, 2015). Batch customization
production method is used in the RMS where the
production of several distinct versions of the same
product over the same production line is possible.
Batch customization method offers less
customizability than product customization, therefore
a higher production rate and capacity can be obtained.
That makes the RMS a compromised solution
between the DMS and the FMS.
The rest of this article is structured as follows. In
section 2 we address the challenges in the complex
worker-cobot interaction under the umbrella of
reconfigurable manufacturing. Autonomous reactive
agent will be discussed in details in section 3, we will
focus in particular on agent communication via
ontology as it will be the ground of building the
solution concept in section 4. Furthermore, section 5
shows a case-study implementation of this concept.
Finally, section 6 will wrap up the work summary
with the conclusion and the future research.
2 COMPLEX INTERACTION
CHALLENGES
The cooperation between the worker and the cobot in
a reconfigurable manufacturing context can be seen
as a complex information interaction system for the
following reasons (Sadik and Urban, 2017):
In contrast to a simple interaction scenario which
uses basic data types such as Strings, Boolean, or
Integers, a complex interaction scenario not only
needs to exchange information in form of objects,
but also needs to express the relations between
these objects.
In a worker-cobot complex interaction scenario, it
is needed to provide the meta-data required for
this cooperation. Descriptive meta-data is needed
to give a meaning of the tasks and the operations
which can be done during the cooperation.
Structural meta-data is required to indicate how to
compound new objects from existing objects.
Finally, administrative meta-data is required to
control the task assignment and the cooperation
planning, management, and execution.
In contrast to object serialization convention
which translates the data structure into a stream of
bytes to be transferred and stored, a worker-cobot
complex interaction scenario requires a human
readable representation language to perform the
same purpose of serialization. In other words, a
language which can be understood by both the
worker and the cobot should be used to describe
the shared work environment.
The variation in the required production
customization level and rate must be
comprehended by the communication and
information control system. As the complex
interaction between the worker and the cobot will
be build based on this comprehension.
In case of one cobot is in cooperation with two
workers, the cobot is considered to be a shared
operational resources. Considering the fact that
the required time from the worker to finish a
specific task is always varying, this means that the
interaction should be able to tolerate this time
variation.
Therefore during this article we focus on explaining
the possible approach and technology which is able to
overcome the above challenges.
3 AUTONOMOUS AGENT
ONTOLOGY
Figure 2: JAVA Agent Development.
A software agent is a computer system situated in a
specific environment that is capable of performing
autonomous actions in this environment in order to
meet its design objective (Jennings and Wooldridge,
1998). An agent is autonomous by nature. It means
that an agent operates without a direct intervention of
the humans, and has a high degree of controlling its
actions and internal states. In order to achieve this
autonomy, an agent must be able to fulfil the
following characteristics:
Responsive: an agent is capable of perceiving its
environment and respond in a timely fashion to
the changes occurring in it.
Pro-active: an agent is able to exhibit
opportunistic, goal directed behaviour and take
initiative.
Social: an agent can interact with other artificial
agents or humans within its environment in order
to solve a problem.
Conceptually, an agent is a computing machine which
is given a specific problem to solve (Shen et al.,
2006). Therefore, it chooses certain set of actions and
formulates the proper plans to accomplish the
assigned task. The set of actions which are available
to be performed by the agent are called a behaviour.
The agent behaviours are mainly created by the agent
programmer. An agent can execute one or more
behaviour to reach its target. The selection of an
execution behaviour among others would be based on
a certain criteria defined by the agent programmer.
Building an execution plan is highly depending on the
information which the agent infers from its
environment including the other agents. A Multi-
Agent System (MAS) is a collective system
composed of a group of artificial agents, teaming
together in a flexible distributed topology, to solve a
problem beyond the capabilities of a single agent.
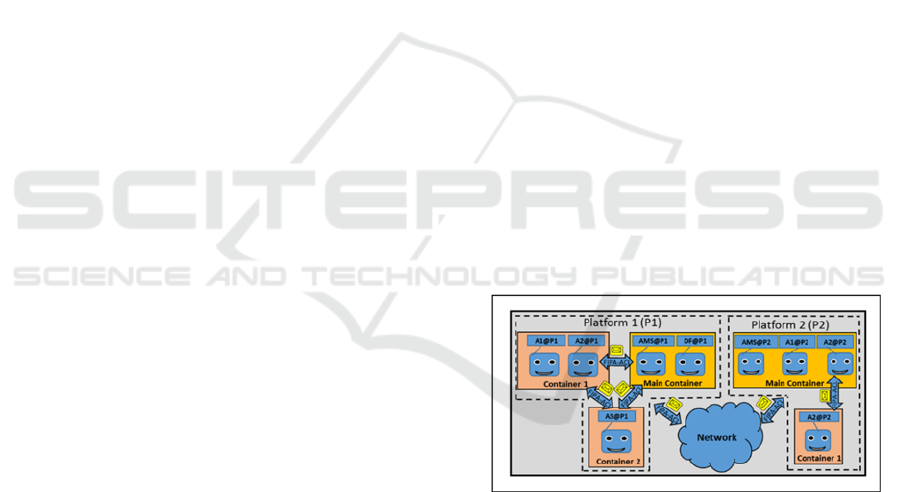
JAVA Agent Development Environment (JADE)
is a distributed MAS middleware framework as it is
shown in Figure 2 (JADE, n.d.). Each JADE instance
is an independent thread which contains a set of
containers. A container is a group of agents run under
the same JADE runtime instance. Every platform
must contain a main container. A main container
contains two necessary agents which are: an Agent
Management System (AMS) and a Directory
Facilitator (DF). AMS provides a unique ID for every
agent under its platform to be used as an agent
communication address. While the DF announces the
services which agents can offer under its platform, to
facilitate the agent services exchange, so that every
agent can obtain its specific goal (Teahan, 2010).
JADE applies the reactive agent architecture which
complies with the Foundation for Intelligent Physical
Agent (FIPA) specifications, and provides a graphical
interface to deploy and debug a MAS (Bellifemine et
al., 2007). FIPA is an IEEE Computer Society
standards organization that promotes agent-based
technology and the interoperability of its standards
with other technologies (FIPA, n.d.). JADE agents
use FIPA-Agent Communication Language (FIPA-
ACL) to exchange messages either inside its own
platform or with another platform in a distributed
MAS as shown in Figure 2 and Figure 3.
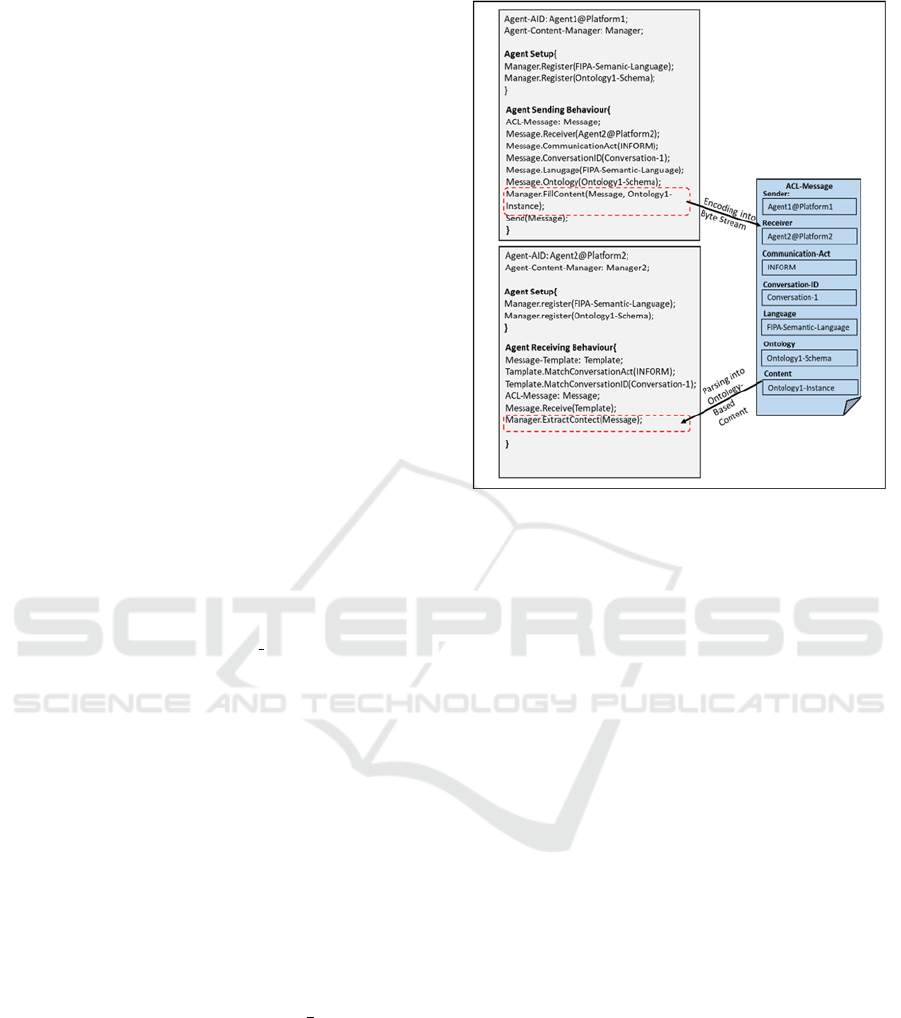
Figure 3: JADE Agents Communication via FIPA-
Ontology.
The interaction mechanism for sending and
receiving an ontology-based ACL-message between
two JADE agents is illustrated in Figure 3. Every
JADE agent must have an Agent Identification (AID).
The AID is composed of a unique name for the agent
over a specific platform, and it is used as an address
for the agent to send or receive a message (Poslad,
2007). Also every agent must have a setup method.
The setup method is automatically triggered after the
agent creation. The main function of the setup method
is to initialize the required parameters and behaviours
needed for the agent to perform its tasks. In order to
complete a communication process between two
agents, one agent must have a behaviour which is
responsible for constructing and sending an ACL-
message, the other agent must have a behaviour
which is responsible for receiving the ACL-message.
An ACL-message is composed from variety of fields,
and it must have at least a Sender and a Receiver
AIDs. Other fields such as the Communication-Act
and the Conversation-ID are necessary to distinguish
the message at the receiver side. The
Communication-Acts are defining the ACL-message
in terms of standard FIPA actions or functions, for
instance a communication-act field can contain
INFORM, REQUEST, CONFIRM, etc. The
Conversation-ID parameter can be any unique string
to distinguish or record a specific conversation topic
or thread among the agents.
The content field of an ACL-message contains a
String data type in case of simple agent conversation.
However in a complex agent conversation, an
ontology-based content will be the proper
conversation method. In order to communicate via
agent ontologies, every agent must deploy a content-
manager. The content-manager registers a common
language of conversation between the agents (Caire,
2009). The FIPA Semantic Language (FIPA-SL) is
not mandatory but preferable in a complex JADE
conversation. FIPA-SL is a human readable language
which defines the syntactic rules needed to parse or
encode an ontology-based content. Also the content-
manger registers the common ontology schemas. The
ontology schema is defining the abstract structure
pattern and the semantics needed to construct or
interpret an ontology-based ACL-message. At the
sender agent side, the content-manager checks the
semantics of the sent ACL-message based on a
common ontology schema, and decodes that message
into a stream of Bytes via FIPA-SL. At the receiver
side, the content-manager parses the received ACL-
message into a human readable content via FIPA-SL,
and structures it based on a common ontology
schema.
4 SOLUTION CONCEPT
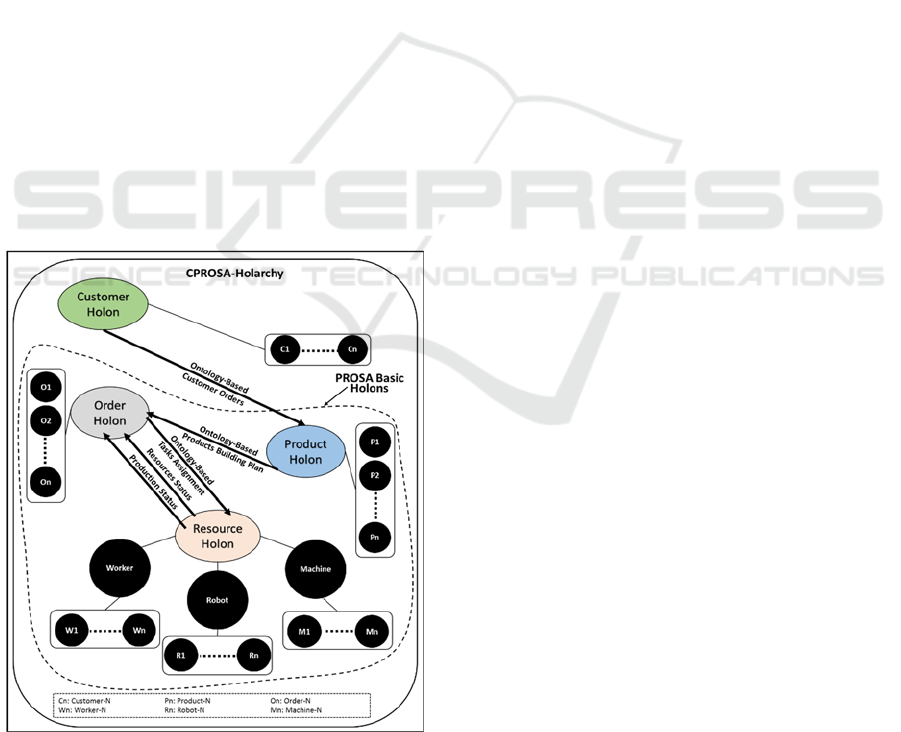
Figure 4: CPROSA-holarchy.
In the late sixties, the term holon has been introduced
for the first time by philosopher Koestler (Koestler,
1967). Koestler developed the term as a basic unit in
his explanation of the evolution of the biological and
social structures. Based on his observations that
organisms (e.g., biological cells) are autonomous
self-reliance units, which have a certain degree of
independent control of their actions, yet they still
subject to higher level of control instructions. His
conclusion was that any organism is a whole “holos”
and a part “on” in the same time, which derived the
term holon (Botti and Giret, 2008). The concept of
holon has been adopted in the early nineties by the
intelligent manufacturing systems (IMS) consortium,
to define a new paradigm for the factory of the future.
The following terminologies has been defined by the
IMS to provide a better understanding of the Holonic
Control Architecture (HCA):
Holon: an autonomous cooperative building block
of the manufacturing system that can be used to
transform, transport, store and/or validate the
information and the physical signals (Babiceanu
and Chen, 2006).
Autonomy: the capability of the holon to create
and control the execution of its own plans and/or
strategies.
Cooperation: a process whereby a set of holons
develop mutually acceptable plans and execute
these plans together.
Holarchy: a system of holons which cooperate to
achieve a goal or objective. The holarchy defines
the basic rules for cooperation of the holons and
thereby limits their autonomy.
The HCA is basically a distributed control and
communication topology which divides the
manufacturing process tasks and responsibilities over
different holon categories. Product-Resource-Order-
Staff-Architecture (PROSA) is the most known HCA
model (Van Brussel et al, 2003). The PROSA model
defines three basic holons which can be seen in Figure
4. The PROSA holons are as following:
Product Holon (PH): is responsible for processing
and storing the different production plans required
to insure the correct manufacturing of a certain
product.
Order Holon (OH): is responsible for composing,
managing the production orders. Furthermore, in
a small scale enterprise, it should assign the tasks
to the existing operating resources and monitor
the execution status of the assigned tasks.
Operational Resource Holon (ORH): is a physical
entity within the manufacturing system, it can
represent a robot, machine, worker, etc. The ORH
is usually composed of two components. The first
component is the physical component which
represents the physical input/output (I/O) of a
resource. The second component is the
communication component which is responsible
for translating the I/O events into information and
conducting them to the other holons and vice-
versa.
Another extra holon can exist in the PROSA model
which is the Supervisor Holon (SH). The SH will be
implemented in a large scale enterprise as its main
function is to coordinate with the other SHs for
scaling and expanding the manufacturing system. In
the context of reconfigurable manufacturing we
found that it is necessary to modify the PROSA model
(Sadik and Urban, 2016). Therefore, a new holon is
introduced by this research which is the Customer
Holon (CH). A CH is deployed on the customer
platform to provide a User Interface (UI) for the
customer to select and customize the product order.
Furthermore, it interacts with the PH to trigger a new
production order. Therefore, we are going to refer to
our PROSA modified holarchy as CPROSA.
While the HCA is a conceptual model focuses on
the holons functionalities and responsibilities, it does
not specify a certain technology to apply that concept.
On the other hand, artificial agent technology is a
general purpose solution which can apply the HCA.
Thus, during this research, JADE agent framework
has been used to implement the HCA. JADE
empowers the object oriented concepts such as
abstraction and inheritance, which makes it very
suitable for applying the HCA. For example, a
Worker Holon (WH) can have many different
instances originate from it, yet every WH instance can
act differently than the others. Figure 4 illustrates the
main concept to implement a reconfigurable
cooperative manufacturing workcell, which can
contain different workers and cobots as operational
resources, the manufacturing workcell can
simultaneously process different customized orders
from variety of customers.
Using JADE to implement the reconfigurable
cooperative manufacturing workcell empowers
another very strong concept which is the agent
communication via ontology (Alsafi and Vyatkin,
2010). As it has been discussed earlier, HCA is a
practical solution for the reconfigurable cooperative
manufacturing workcell (Balakirsky, 2015). The
HCA implementation includes many different
objects. This is not only obligating the agents to send
or receive objects, but also it obligates them to
express relations between these objects and perform
actions over them (Fiorini et al., 2015), which brings
us to use the concept of ontology to communicate
between the agents. Examples of these
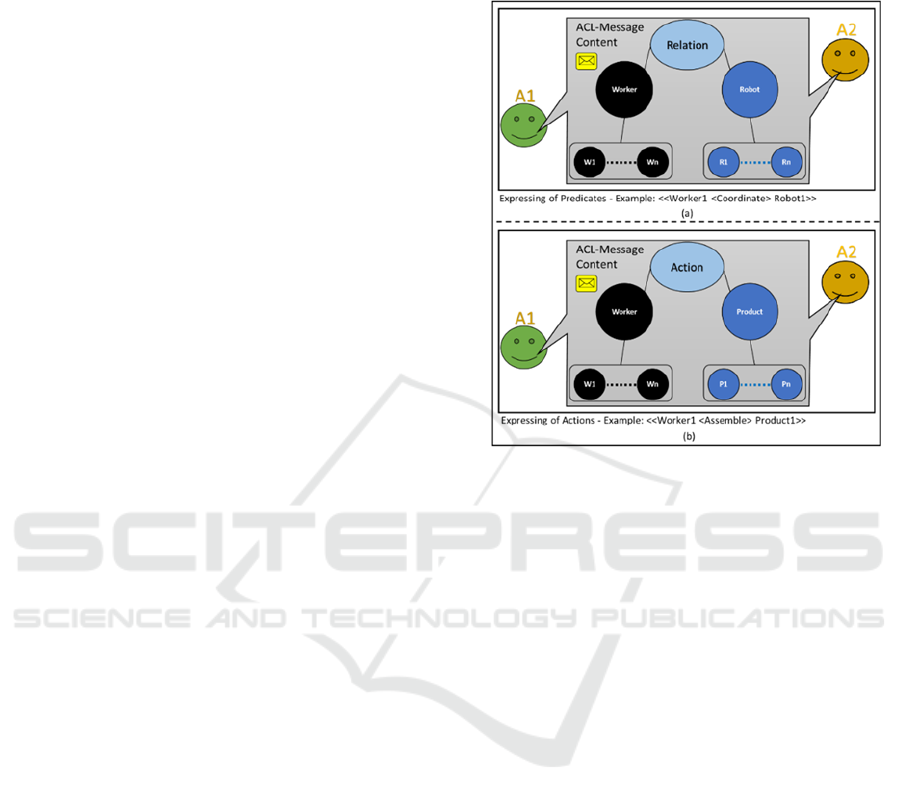
communication can be seen in Figure 5.
Figure 5: Agents Communication via Ontology.
The term ontology can be considered sometimes
vague and not precise, therefore we state below the
most suitable definitions of ontologies for our
research (Rodrigues, 2012).
An ontology defines the basic terms and relations
comprising the vocabulary of a topic area as well
the rules for combining terms and relations to
define extensions for this vocabulary (Neches et
al., 1991).
An ontology is a formal, explicit specification of
a shared conceptualization (Gruber, 1995).
An ontology is a logical theory accounting for the
intended meaning of a formal vocabulary (Wang
et al., 2012). i.e. “it is a commitment to a
particular conceptualization of the world”.
An ontology provides the meta-information to
describe the data semantics, represent knowledge,
and communicate with various types of entities
(e.g. software agents and humans) (Fensel, 2004).
An ontology can be described as “means of
enabling communication and knowledge sharing
by capturing a shared understanding of terms that
can be used both by humans and machine
software” (Lai, 2007).
All the previous definitions lead to the complete
understanding of the meaning of ontology in the
context of our research. Thus an ontology is a
conceptual tool to represent and create a common
understanding for the manufacturing workcell entities
(i.e., holons). Furthermore this common
understanding would enable to exchange, reuse and
extend the manufacturing knowledge. JADE supports
the ontology-based MAS by defining three different
types of schemas (Leitao et al., 1991):
Terms: expressions that indicate entities (abstract
or concrete) that exist in the MAS and that agents
may reason about. Terms can be seen as
primitives which are atomic data types such as
strings or integers, and concepts which are
complex structure such as objects.
Predicates: expressions that describe the status of
the world such as the relationships between the
concepts.
Actions: expressions that describe mechanisms or
operations that can be executed by an agent.
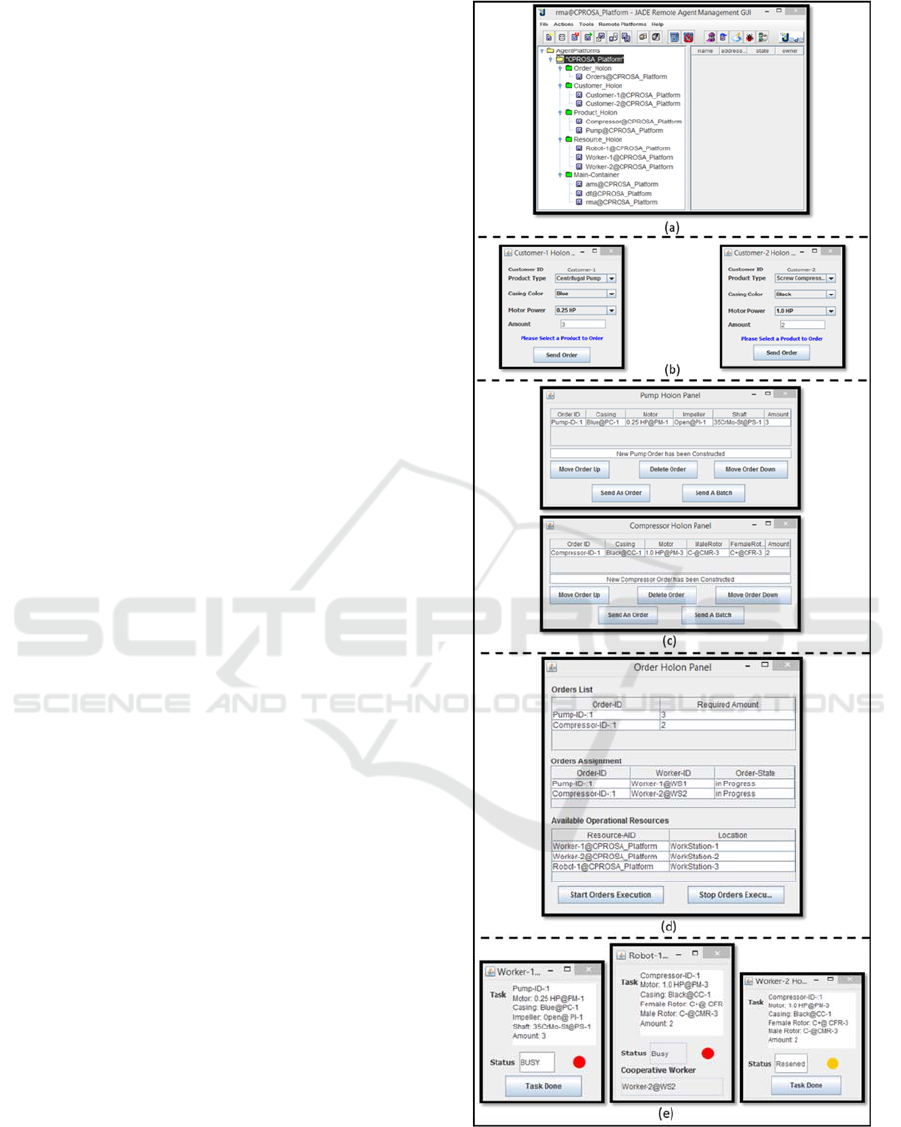
5 CASE-STUDY
5.1 Case-study Description
During this research we selected a specific case-study
where two workers are in cooperation with one cobot.
The goal of the case-study is to implement the
solution concept. The CPROSA holarchy deployment
can be seen in Figure 6-a, JADE framework contains
four containers which present the previously
described CPROSA holons. Two CHs can be found
in this case-study as it can be seen in Figure 6-b. Both
the CHs have a similar UI. The UI of the CH is
providing a tool for ordering a specific product with
certain features (i.e., parts). The customer selects the
very basic features and identifies the needed amount
of the product then sends the order to the PH.
Two products can be manufactured in this case-
study, the first is a centrifugal pump and the second is
a screw compressor. The UIs of the pump and the
compressor holons can be seen in Figure 6-c. The two
products share some features such as the casing and
the electrical motor. The pump has two unique
features which are the impeller and the shaft, while
the compressor has other two unique features which
are the male-rotor and the female-rotor. When a PH
receives a product order from the CH, it constructs the
building plans for this product order as it will be
discussed later in details. The PH also has the ability
to rearrange the orders or modify them before sending
them to the OH.
Figure 6: (a) CPROSA Model Implementation – (b)
Customers Holons UI – (c) Products Holons UI – (d) Order
Holon UI – (e) Operation Resources Holons UI.
The OH is responsible for collecting the product
orders from all the other PHs as it is shown in Figure
6-d. Simultaneously the OH discovers the existence
of the operation resources. Furthermore, it starts and
stops the production process. Two WHs (W1H,
W2H) and one Robot Holon (RH) are the operation
resources in this implementation as it is shown in
Figure 6-e. The function of the workers within this
case-study is to perform an assembly operation for the
customized product orders, while the function of the
cobot is to pick and place the customized features of
every production order to the worker workstation.
As we do not have a robot hardware during this
implementation, we assumed that the cobot will
always take two seconds to pick and place one
product. Therefore the RH will multiply the number
of products by two to obtain the overall time needed
for the whole pick and place operations. Accordingly
the RH can have two statuses, either busy or free.
Another status is required for the WH which is the
reserve status. In the reserve status the WH is waiting
the cobot to load at least one product to the worker,
therefore the worker can start the assembly operation
and subsequently the WH status turns to be busy. The
WH stays in the busy status till the worker presses the
task-done button, then the WH status would be free.
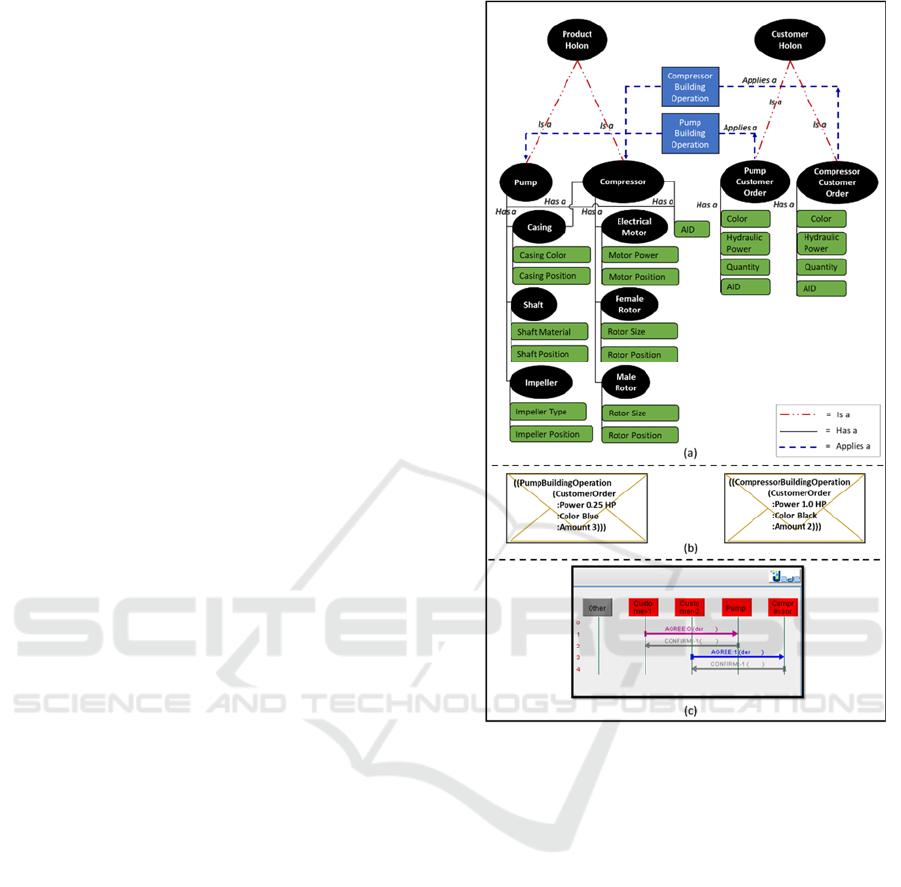
5.2 Interaction Ontologies
5.2.1 Building-Operations-Ontology
As has been discussed earlier at the solution concept.
JADE is using three different types of schemas to
construct its ontology. Figure 7-a shows the required
schemas to build a product order from a customer-
order. The first set of JADE schemas which can be
seen in the figure are the terms (i.e., concepts and
primitives):
Compressor-Customer-Order: a schema which
encapsulates some attributes such as the required
compressor color, the needed hydraulic power,
and the required amount. Also it contains an AID
as every customer- order is a life agent which
needs a unique ID.
Pump-Customer-Order: a schema which
encapsulates some attributes such as the required
pump color, the needed hydraulic power, and the
required amount. Also it contains an AID as every
customer-order is a life agent which needs a
unique ID.
Casing: a shared feature between the pump and
the compressor. The casing schema contains two
attributes which are the casing color and position
at the features workspace or storage.
Figure 7: (a) Building-Operations-Ontology – (b) ACL-
message Content for the Building-Operations-Ontology –
(c) JADE Interaction between Customers Holons and
Products Holons.
Electrical-Motor: a shared feature between the
pump and the compressor. The motor schema
contains two attributes which are the motor
electrical power, and position at the features
workspace or storage.
Shaft: a unique feature of the pump. The shaft
schema contains two attributes which are the shaft
material, and position at the features workspace or
storage.
Impeller: a unique feature of the pump. The
impeller schema contains two attributes which are
the impeller type, and position at the features
workspace or storage.
Female-Rotor: a unique feature of the compressor.
The female-rotor schema contains two attributes
which are the rotor size, and position at the
features workspace or storage.

Male-Rotor: a unique feature of the compressor.
The male-rotor schema contains two attributes
which are the rotor size, and position at the
features workspace or storage.
Compressor: a concept schema which
encapsulates many other schemas under it, those
schemas are the casing, electrical-motor, female-
rotor, and male-rotor. Every compressor is a life
agent, therefore it must contain an AID attribute
as well.
Pump: a concept schema which encapsulates
many other schemas under it, those schemas are
the casing, electrical-motor, shaft, and impeller.
Every pump is a life agent, therefore it must
contain an AID attribute as well.
The second set of JADE predicate schemas that have
been used in this implementation can be addressed as
the following:
(concept-x) <Is-a> (concept-y): usually a relation
between two concept schemas. This relation is
similar to the object oriented abstraction. Thus,
this predicate expression has been used to express
the parent-child relationship between the
concepts.
(concept-x) <Has-a> (attribute-x): usually a
relation between a concept and an attribute, an
attribute can be a concept schema or a primitive.
This relation is similar to object oriented
inheritance. Thus, this predicate expression has
been used to form sophisticated objects from
simpler ones.
(agent-x) <Applies-a> (action-x): usually a
relation between a concept and an action schema.
A concept uses this predicate expression to trigger
one or more than one actions at the same time. The
action schemas will be discussed below in details.
The third set of JADE action schemas that have been
used in this implementation can be addressed as the
following:
Compressor-Building-Operation: this action
schema expects a Compressor-Customer-Order
concept as an input, and it can be deployed by
either customer-1 or customer-2 agents. An
example of this operation can be seen at the ACL-
message content in at the right side of Figure 7-b.
Pump-Building-Operation: this action schema
expects a Pump-Customer-Order concept as an
input, and it can be deployed by either customer-
1 or customer-2 agents. An example of this
operation can be seen at the ACL-message at the
left side of Figure 7-b.
Figure 7-c shows JADE interaction scenario between
the CHs (i.e., customer-1 agent and customer-2 agent)
and the PHs (i.e., pump agent and compressor agent).
In this scenario, customer-1 agent sends an ACL-
message with an AGREE communicative act. The
AGREE-message contains a Pump-Building-
Operation and a Pump-Customer-Order. The
AGREE-message is received by the pump agent.
Therefore, the pump agent confirms the receiving by
sending back a CONFIRM-message to customer-1
agent. Simultaneously the pump agent constructs a
pump instance based on the incoming customer-
order. The same building mechanism is used between
cusomter-2 agent and the compressor agent to
construct a new instance of a compressor associated
with a customer-2 order.
5.2.2 Planning-Operations-Ontology
Figure 8-a shows the required schemas to construct
the production planning from a product orders.
Similar to the building-operations-ontology, the
planning-operations-ontology contains three different
kinds of schemas. The concept schemas are as
following:
Compressor-Order: a schema which extends the
compressor schema by adding the required
amount of compressor units.
Pump-Order: a schema which extends the pump
schema by adding the required amount of pump
units.
Operations-List: a schema which includes a list of
operations which can be used to manufacture
either a pump or a compressor. The schema can be
used to manufacture a product which needs three
operations or less.
Compressor-Manufacturing-Order: a schema
which combines a Compressor-Order schema and
an Operations-List schema. Also it has an AID
attribute as it acts as an agent.
Pump-Manufacturing-Order: a schema which
combines a Pump-Order schema and an
Operations-List schema. Also it has an AID
attribute as it acts as an agent.
The predicate schemas which has been used in this
part of the implementation are exactly the same to the
ones that has been used in the building-operations-
ontology. While the action schemas are as following:
Compressor-Manufacturing-Operation: this
action schema expects a Compressor-Order and a
Compressor-Operations-List concept schema as
an input, and it is deployed by the compressor
agent. A detailed example of this operation can be

seen at the ACL-message at the right side of
Figure 8-b.
Pump-Manufacturing-Operation: this action
schema expects a Pump-Order and a Pump-
Operations-List concept schema as an input, and
it is deployed by the pump agent. A detailed
example of this operation can be seen at the ACL-
message content in Figure 8-b at the left.
Figure 8-c shows JADE interaction scenario between
the PHs (i.e. pump agent and compressor agent) and
the OH. This interaction is following the same
mechanism used in the building-operations-ontology.
Except that we changed the AGREE-messages with a
PROPAGATE-messages.
Figure 8: (a) Planning-Operations-Ontology – (b) ACL-
message Content for the Planning-Operations-Ontology –
(c) JADE Interaction between Products Holons and Order
Holon.
5.2.3 Manufacturing-Operations-Ontology
Figure 9: (a) Manufacturing-Operations-Ontology – (b)
ACL-message Content for the Manufacturing-Operations-
Ontology – (c) JADE Interaction between Order Holon and
Resources Holons.

Figure 9-a shows the required schemas to execute the
manufacturing operations from the production plans.
Similar to the building-operations-ontology and the
planning-operations-ontology, the manufacturing-
operations-ontology contains three different kinds of
schemas. The concept schemas are as following:
Worker: a schema which contains two attributes,
the first one is the worker AID as it acts as a life
agent, and the second is the worker location
within the workcell (i.e., workstation). The
worker agent is providing an UI for the worker for
providing the assigned task and inquiring the task
done event (see Figure 6-e). Two instances of the
worker agent exist in this case-study scenario. As
has been mentioned before in section 5.1, the
worker can have three statuses. A free status when
there is no product orders or the production is not
started. A reserve status when the worker is
waiting the first product unit to be placed by the
cobot. A busy status while the cobot is still
handling the orders and till the worker triggers the
task-done button.
Robot: a schema which contains one attribute,
which is the robot AID as it acts as a life agent.
The robot schema does not have a workstation
attribute because in this specific case-study, we
have one cobot which is responsible for the pick
and place. Therefore the location of the cobot is
not necessary required, however in case of more
than one cobot this attribute could be important.
The robot agent is providing an UI to show the
assigned task and the status of the cobot (see
Figure 6-e). As has been mentioned before in
section 5.1, the cobot can have two statuses. A
free status when there is no product orders or the
production is not started. A busy status when the
cobot is picking and placing the production
orders. A timer of two second has been assigned
to every pick and place operation.
The predicate schemas which has been used in this
part of the implementation is exactly the same to the
ones that has been used in the building-operations-
ontology and planning-operations-ontology. While
the action schemas are as following:
Compressor-Pick-And-Place-Operation: this
action schema expects two concept schema
inputs; the first concept schema input is the
Compressor-Order which contains the detailed
specifications of the compressor. Therefore, the
cobot can use these information especially the
compressor features positions to perform the pick
operation. The second concept schema input is the
target worker. Therefore, the cobot can use the
worker workstation location to place the
compressor features at this location. This action
schema is deployed by the orders agent to interact
with the robot agent. A detailed example of this
operation can be seen at the ACL-message content
at the top right of Figure 9-b.
Pump-Pick-And-Place-Operation: this action
schema expects two concept schema inputs; the
first concept schema input is the Pump-Order
which contains the detailed specifications of the
pump. Therefore, the cobot can use this
information especially the pump features
positions to perform the pick operation. The
second concept schema input is the target worker.
Therefore, the cobot can use the worker
workstation location to place the pump features at
this location. This action schema is deployed by
the orders agent to assign a task to the robot agent.
A detailed example of this operation can be seen
at the ACL-message content at the top left of
Figure 9-b.
Compressor-Assembly-Operation: this action
schema expects one concept schema input which
is the Compressor-Order. This operation is
beneficial for the worker to provide him with the
required features to build a customized
compressor. Moreover, it provides the amount of
required units. This action schema is deployed by
the orders agent to assign a task to any of the
worker agents based on their status. A detailed
example of this operation can be seen at the ACL-
message content at the bottom right of Figure 9-b.
Pump-Assembly-Operation: this action schema
expects one concept schema input which is the
Pump-Order. This operation is beneficial for the
worker to provide him with the required features
to build a customized pump. Moreover, it
provides the amount of required units. This action
schema is deployed by the orders agent to assign
a task to any of the worker agents based on their
status. A detailed example of this operation can be
seen at the ACL-message content at the bottom
left of Figure 9-b.
Figure 9-c shows JADE interaction scenario among
the OH and the ORHs (i.e., worker1 agent, worker2
agent, and robot agent). During this interaction, the
manufacturing operations are assigned to the
operational resources based on their status. As it can
be seen in lines1, 2, 3, and 4 of Figure 9-c, the orders
agent sends two REQUEST-messages which are
replied by two CONFIRM-messages. The first
REQUEST-message assigns a Pump-Pick-And-
Place-Operation to the robot agent. The second

REQUEST-message assigns a Pump-Assembly-
Operation to worker1 agent. The reason that the
pump-order has been processed first by the orders
agent is that it is the first product order at the order
list (refer to Figure 6-d). In line 5 of Figure 9-c, the
robot agent sends an INFORM-REF-message to
worker1 agent to tell that it placed the first pump unit.
Then, the robot agent sends two INFORM-IF-
messages to the orders agent and worker1 agent to tell
that it finished handling all the required pump
amounts (i.e., three pump units by referring to Figure
6). The two INFORM-IF-messages can be seen in
lines 6, and 7 of Figure 9-c. The same interaction
mechanism can be seen in lines 9,10,11,12, and 13 to
assign the compressor-order manufacturing
operations to the worker2 agent and the robot agent.
Lines 14, and 15 of Figure 9-c shows the INFORM-
messages to express done-signal which is generated
from worker1 and worker2 agents to the orders agent.
6 SUMMARY, CONCLUSION
AND FUTURE WORK
During this research, we introduced the collaboration
between the worker and the cobot as a new flexible
trend in the reconfigurable manufacturing. As this
subject has many different perspectives, we focused
our research attention on the complex information
interaction between the worker and the cobot. The
challenges in this interaction are getting more
sophisticated when we put it under the reconfigurable
manufacturing umbrella.
CPROSA holarchy has been proposed as a
solution for this dilemma. It is a modified version of
PROSA model which adds the customer as a new
basic holon in the HCA. Furthermore, our CPROSA
is not only describing the interaction among the basic
holons in order to accomplish the worker-cobot
collaboration, but also it uses the powerful concept of
ontology to create a shared understanding of the
entities within the collaborative manufacturing
environment. Furthermore, this shared understanding
is used to achieve the complex interaction scenarios.
JADE framework has been used to implement the
CPROSA solution model and the case-study scenario.
During the case-study we proposed a simple scenario
where two customers customize two different orders.
The first order is three units of a customised
centrifugal pump, and the second order is two units of
a customized screw compressor. Moreover, we
assumed that we have two workers in cooperation
with one cobot. The products orders should be
processed by the OH and then assigned to the ORHs
based on their status. The reason for selecting this
scenario is to show how much complex the
interaction can be - even in a simple case-study.
During the implementation of the case-study we
showed three connected ontologies. The first
ontology was responsible for building the product
plans from the customer-orders, the second ontology
was responsible for planning the manufacturing
process, and the third ontology was responsible for
executing the manufacturing operations.
The privileges of using the ontology concept were
so influential in this implementation. For instance, the
conceptualization and the modularity were very clear
when at the concepts, predicates, and actions
schemas. The object oriented abstraction can be seen
in the parent-child relationships between the concept
schemas. The inheritance can be implemented from
one concept to another using Has-a predicate. All the
predicate schemas have been reused at the different
parts of the implementation which guarantees the
reusability of the research concept. The extensibility
was clear when extending one concept schema to
another more complicated schemas, or when using
many different ontologies to work together in the
same interaction context.
Regardless the simplicity of the case-study, the
solution concept shows that it is totally able to solve
the addressed research challenges. However during
the future work, we intend to implement the CPROSA
model over more collaborative operational resources.
Even it would be a very hard to demonstrate this kind
of research in a single article. Other technologies such
as XML and industrial web-services could be a good
approach to solve this research challenges, which
could be a focus in our future research. Also during
the future research we will use a real hardware for the
robot instead of the UI only.
REFERENCES
Alsafi, Y. and Vyatkin, V., 2010. Ontology-based
reconfiguration agent for intelligent mechatronic
systems in flexible manufacturing. Robotics and
Computer-Integrated Manufacturing, Vol. 26, Issue 4,
pp.381-391.
Babiceanu, R. and Chen, F. (2006). Development and
Applications of Holonic Manufacturing Systems: A
Survey. Journal of Intelligent Manufacturing, Vol. 17,
Issue 1, pp.111-131.
Balakirsky, S., 2015. Ontology based action planning and
verification for agile manufacturing. Robotics and
Computer-Integrated Manufacturing, Vol. 33, pp.21-
28.

Bellifemine, F., Caire, G., Greenwood, D., Developing
Multi-Agent Systems with JADE, Vol. 7 ed. John Wiley
& Sons, 2007.
Botti, V., Giret, A., Holonic Manufacturing Systems,
ANEMONA - A Multi-agent Methodology for Holonic
Manufacturing Systems, Springer Series in Advanced
Manufacturing, pp. 7-20, 2008.
Caire, I., JADE Tutorial: JADE Programming for
Beginners, TILAB & West Sussex, 2009.
Elmaraghy, Hoda A., Flexible and reconfigurable
manufacturing systems paradigms, International
Journal of Flexible Manufacturing Systems, Vol. 17,
Issue 4, pp 261-276, October 2005.
Fensel, D., 2004. Ontologies. 1st ed. Berlin, Heidelberg:
Springer Berlin Heidelberg.
Gruber, T., 1995. Toward principles for the design of
ontologies used for knowledge sharing, International
Journal of Human-Computer Studies, Vol. 43, Issue 5,
pp.907-928.
Fiorini, S., Carbonera, J., Gonçalves, P., Jorge, V., Rey, V.,
Haidegger, T., Abel, M., Redfield, S., Balakirsky, S.,
Ragavan, V., Li, H., Schlenoff, C. and Prestes, E., 2015.
Extensions to the core ontology for robotics and
automation. Robotics and Computer-Integrated
Manufacturing, Vol. 33, pp.3-11.
FIPA, Fipa.org, 2016. [Online]. Available:
http://www.fipa.org/. [Accessed: 06- Oct- 2016].
JADE | Java Agent DEvelopment Framework,
Jade.tilab.com. [Online]. Available:
http://jade.tilab.com/. [Accessed: 1- Oct- 2016].
Jennings, N.R., Wooldridge, M.J., Applications of
intelligent agents, Agent Technology: Foundations,
Applications, and Markets, Springer, pp. 3–28, 1998.
Koestler, A., The Ghost in the Machine, Hutchinson, 1967.
Koren, Y., Heisel, U., Jovane, F., Moriwaki, T., Pritschow,
G., Ulsoy, G., Brussel H., 1999, Reconfigurable
Manufacturing Systems, CIRP Annals, Vol. 48, pp.
527-540.
Kruger, K., Basson, A., 2015, Implementation of an Erlang-
Based Resource Holon for a Holonic Manufacturing
Cell, Studies in Computational Intelligence, Vol. 594,
pp. 49-58.
Lai, L., 2007. A knowledge engineering approach to
knowledge management. Information Sciences, Vol.
177, Issue 19, pp.4072-4094.
Leitao, P., Rodrigues, N., Turrin, C., Pagani, A., Petrali, P.,
2012. GRACE ontology integrating process and quality
control, IECON 2012 - 38th Annual Conference on
IEEE Industrial Electronics Society.
Neches, R., Fikes, R., Finin, T., Gruber, T., Patil, R.,
Senator, T., Swartout, W., 1991. Enabling Technology
for Knowledge Sharing, Al Mag., Vol. 12, pp.36-56.
Poslad, S., Specifying Protocols for Multi-Agent Systems
Interaction, 2007. ACM Transactions on Autonomous
and Adaptive Systems, Vol. 2.
Rodrigues, N., 2012. Development of an Ontology for a
Multi-Agent System Controlling a Production Line,
MSc thesis, Instituto Politécnico de Bragança.
Sadik A.R., Urban B., 2016, A Novel Implementation
Approach for Resource Holons in Reconfigurable
Product Manufacturing Cell, Proceedings of the 13th
International Conference on Informatics in Control,
Automation and Robotics, pp. 130-139.
Sadik A.R., Urban B., 2017, Applying the PROSA
Reference Architecture to Enable the Interaction
between the Worker and the Industrial Robot - Case
Study: One Worker Interaction with a Dual-Arm
Industrial Robot, Proceedings of the 9th International
Conference on Agents and Artificial Intelligence -
ICAART, Vol 1, pp. 190-199.
Shen, W., Hao Q., Yoon, H. J., Norrie, D. H., 2006.
Applications of agent - based systems in intelligent
manufacturing: An updated review, Advanced
Engineering Informatics, Vol. 20, pp. 415-431.
Teahan, W., Artificial Intelligence – Agent Behaviour,
BookBoon, 2010.
Van Brussel, H., Wyns, J., Valckenaers, P., Bongaerts, L.,
Petters, P. Reference Architecture for Holonic
Manufacturing Systems: PROSA. Computers in
Industry, Vol. 37, pp. 95–108, 2003.
Wang, H., Gibbins, N., Payne, T. and Redavid, D., 2012. A
formal model of the Semantic Web Service Ontology
(WSMO). Information Systems, Vol. 37, Issue 1,
pp.33-60.
